Long multi-stage training for a motor-impaired user in a BCI competition
Texte intégral
Figure
Documents relatifs
So far the features, e.g., the power in some frequency bands and channels, and clas- sifiers, e.g., LDA or Support Vector Machine (SVM), used to design EEG-based BCI are optimized
To evaluate the inhibitor process based on this last idea, we designed a hybrid BCI by combining a synchronous motor imagery based BCI that uses beta ERS posterior to feet
8.2. Machine learning and user learning in MT-BCI This paper focused on various elements which are dedicated to user training in brain-computer interfaces, notably
During the last phase (i.e., transfer), since we started using multiple training sessions, different overlaps were used for the classifier calibration and for the
In the case of the machine learning approach, this feed- back will have another property: it will indicate a good performance when the bike ride done by the student is very similar
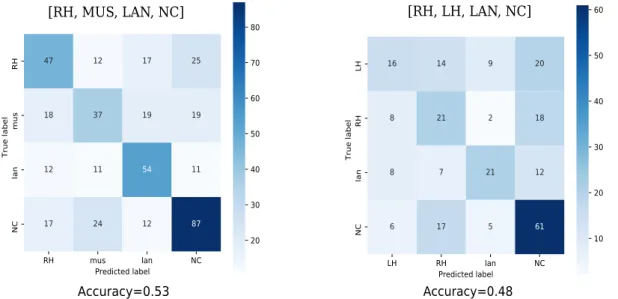
The results of this longitudinal study show that participants improved their task completion time, accuracy (the distance error and angle difference between the placed cube and
Contrary to previous research in the field, we did not set out to evaluate the effectiveness of different kinds of attentional focus on performance, but rather to employ a
In order to examine whether stereoscopic depth information could drive fast automatic correction of hand pointing, an experiment was designed in a 3D visual environment in
