Commande adaptative par placement de
Université Akli Mohand Oulhadj
Faculté
Département
Domaine
Spécialité :
Mémoire de fin d’études
Pour l’obtention du diplôme de MASTER
LADJAL Haizia ZEGHAD Rima
• Mr. BENZIANE Mourad
• Mr. BENSAFIA Yassine
• Mm. MADI Saida
Commande adaptative par placement de
systèmes linéaires
Thème
Université Akli Mohand Oulhadj –Bouira-
Faculté: Sciences et Sciences Appliquées
Département: Génie Electrique
Domaine : Sciences et Technologie
Filière : Electronique
: Electronique des systèmes embarqués
Mémoire de fin d’études
Pour l’obtention du diplôme de MASTER
Réalisé par :
LADJAL Haizia ZEGHAD Rima
Soutenu le : 01 /10/2018
Devant le Jury composé de:
BENZIANE Mourad Président
Encadreur
Examinateur UAMOB
Commande adaptative par placement de
pôles des
s
Pour l’obtention du diplôme de MASTER
LADJAL Haizia ZEGHAD Rima
Président UAMOB
Encadreur UAMOB
Examinateur UAMOB
A la mémoire de mon père,
Que dieu accorde lui le salut et le pardon et fait l’entrer au paradis et préserver du châtiment de la tombe et du châtiment de l’enfer. Repose en paix incha’allah.
A ma mère,
Tu m’as donné la vie, la tendresse et le courage pour réussir. Tout ce que je peux t’offrir ne pourra pas exprimer l’amour et la reconnaissance que je te porte. Aucune dédicace ne saurait exprimer mes sentiments, que dieu te préserve et te procure santé et langue vie.
A mon frère Rabeh et sa femme Larem, mes sœurs Yasmina et son marri Nabil, Fella et son marri Hocine ainsi que mes chères sœurs Faiza et Hadda.
A mes neveux et mes nièces : Yasser, Anes, Ibrahim, Ishak, Ala, Nourelhouda, Iyad et Mohamed.
A ma famille, A mes ami(e)s,
A toute la promotion « Master2 ESE» 2017 /2018.
Toutez les lettres ne sauraient trouver les mots qu’il faut, tous les mots ne sauraient exprimer la gratitude, l’amour, le respect, la reconnaissance aussi, c’est tout simplement que :
Je dédie ce travail à ma très chére mère,
Qui m’a toujours encouragée dans la vie pour tous les sacrifices déployés pour m’elever dignement et assurer mon éducation dans les meilleurs conditions.
A ma très chére sœur halima et sont mari fares .
A ma grand famille : je cite en particulier mama kamila, mes tantes, mes oncles, ainsi que mes cousins et cousanes.
A mes ami(e)s et spécialement souad louzani et fares bourazek. A toute la promotion « Master2 ESE» 2017 /2018.
Tout d’abord, nous tenons à remercier et rendre grâce à DIEU le
tout puissant de m’avoir donné le courage et la volonté de mener à bien
terminer ce modeste travail.
Nous tenons également à exprimer nos vifs remerciements à toutes les
personnes qui n’ont aidé tout au long de notre travail, particulièrement à :
A notre encadreur Mr .BENSAFIA Yassine pour sa gentillesse, sa
disponibilité et sa contribution générale à l’élaboration de ce travail. Durant
cette période, il a toujours été présent et a su nous guider dans notre travail. Il
nous a fourni un cadre de travail idéal pendant notre mémoire qui nous a
permis de développer nos idées. Il a toujours su apporter le regard critique
nécessaire sur nos travaux tout en proposant des solutions et en nous indiquant
des voies de recherche pertinentes. Sans sa disponibilité permanente, son
soutien et ses conseils, ce travail n’aurait pas pu aboutir.
Nous remercions également nos enseignants qui ont contribué à notre
formation et tous les responsables de notre spécialité.
Nous remercions également les membres de jury pour l’honneur
d’accepté de juger notre travail.
Finalement, nous adressons nos sincères remerciements à tous nos proches
et amis, qui ont toujours soutenus et encouragés au cours de la réalisation de ce
travail.
Sommaire
Sommaire ………... I Liste des figures ………II Abréviation ………. III
Introduction générale ………...1
Chapitre 1 : Généralité Sur les techniques de commande
1.1 Introduction ... 31.2 Les techniques de commande (régulation) ... 3
1.2.1 La commande non adaptative (les régulateurs classiques) ... 4
1. Historique ... 4 2. Régulateur PI classique ... 4 3. Régulateur flou ... 5 4. Régulateur PID ... 6 1.2.2 La commande adaptative ... 7 1. Historique ... 7
2. Principe général de la commande adaptative ... 8
3. Les approches de la commande adaptative ... 9
1) Commande adaptative directe ... 9
2) Commande adaptative indirect ... 10
4. Types de Commande adaptative ... 11
a. Commande adaptative a Modèle De Référence (MRAC) ... 11
b. Commande adaptative à Gain Programmé ... 15
c. Commande Auto-Ajustable(STR) ... 16
5. L’objectif de la commande adaptative ... 19
Chapitre 2 : Commande adaptative indirecte par placement de
pôles
2.1 Introduction : ... 21
2.2 Conception placement de pôles ... 22
2.2.1 Modèle du processus : ... 22
2.2.2 Poursuite de modèle : ... 24
2.2.3 Condition de causalité : ... 25
2.2.4 Interprétation de polynôme A0 : ... 28
2.2.5 Relation avec la commande à modèle de référence : ... 28
2.3 Commande auto-ajustable ... 29
2.3.1 Commande auto-ajustable indirecte ... 29
2.3.2 Commande auto-ajustable directe ... 31
2.4 Conclusion : ... 31
Chapitre 3 : Simulations & Applications
3.1 Introduction : ... 323.2 Exemples de Simulation : ... 32
3.2.1 Placement de pôles fixe : ... 32
3.2.1. 1 Exemple 1 :(modèle avec annulation zéros)... 32
3.2.1.1 Exemple 2 : (modèle suivre sans annulation zéros) ... 35
3.2.1.2 Exemple 3 : (Système en temps continu) ... 37
3.2.2 Placement de pôles adaptatifs : ... 40
3.2.2.1 Exemple1 : (modèle sans annulation de zéros) ... 40
3.2.2.2 Exemples 2 : (Modèle suivre avec annulation zéros) ... 41
3.2.2.3 Exemples 3 : (Système en temps continu) ... 43
3.3 Exemple d’application : (Application à un MCC) ... 46
3.3.1 Introduction ... 46
3.3.2 Description du moteur à courant continu ... 46
3.3.2.1 Définition ... 46
3.3.2.3 Modélisation du moteur à courant continu ... 47
3.4 Implémentation sous Matlab : ... 49
3.4.1 Placement de pôles d’ordre entier : ... 49
3.4.1.1 Placement de pôles fixe : ... 49
3.4.1.2 Placement des pôles adaptatif : ... 50
3.5 Conclusion : ... 52
Conclusion générale ……….. 53
Références bibliographiques ……… 54 Résumé
Liste des figures
Chapitre 1 : Généralité Sur les techniques de commande
Figure 1. 1: Schéma fonctionnel d’un processus réglé. ... 5
Figure 1. 2: Schéma bloc d’un régulateur PI. ... 6
Figure 1. 3: Structure d’un régulateur flou. ... 6
Figure 1. 4: Schéma bloc d’un régulateur PID. ... 7
Figure 1. 5: Principe de la commande adaptative. ... 9
Figure 1. 6: Structure de la commande adaptative directe. ... 10
Figure 1. 7: Structure de la commande adaptative indirecte ... 11
Figure 1. 8: Schéma-bloc d’un Système Adaptatif à Modèle de Référence (SAMR). ... 12
Figure 1. 9 : Structure parallèle. ... 13
Figure 1. 10: Structure série. ... 13
Figure 1. 11: Structure série-parallèle. ... 14
Figure 1. 13: Schéma-boc d'un système adaptatif à Gain programmé. ... 15
Figure 1. 14: Schéma-bloc d’un Système Adaptatif Auto-Ajustable(STR). ... 16
Figure 1. 15: principe de la synthèse du régulateur RST.………16
Chapitre 2 : Commande adaptative indirecte par placement de
pôles
Figure 2. 1 : schéma bloc d’un régulateur auto-ajustable.………...21Figure 2. 2: Un régulateur linéaire général à deux degrés de liberté.………..23
Figure 2. 3: Représentation alternative de modèle de référence basée sur le retour de la sortie ………. ….29
Chapitre 3 : Simulations & Applications
Figure 3. 1 : Les résultats de modèle avec annulation zéros (a) : sortie de système, (b) : signal de commande, (c) : signal d’erreur. ... 35Figure 3. 2 : Les résultats de modèle suivre sans annulation zéros (a) : sortie de système, (b) : signal de commande, (c) : signal d’erreur………. ... 37
Figure 3. 3: (a) : Les résultats de Système en temps continu (a) : sortie de système, (b) :
signal de commande, (c) : signal d’erreur. ... 39
Figure 3. 4: Les résultats de modèle sans annulation de zéros (a) : sortie de système, (b) :
signal de commande, (c) : évaluation des paramètres, (d) : signal d’erreur. ... 41
Figure 3. 5: Ies résultats de Modèle suivre avec annulation zéros (a) : ... 43 Figure 3. 6: Les résultats de Système en temps continu (a) : sortie de système, (b) : signal de
commande, (c) : évaluation des paramètres, (d) : signal d’erreur. ... 45
Figure 3. 7: Différents types de moteurs MCC. ... 46 Figure 3. 8: Schéma de principe du moteur à courant continu. ... 47 Figure 3. 9 : Les résultats de Placement de pôles fixe (a) : sortie de système, (b) : signal de
commande, (c) : signal d’erreur. ... 50
Figure 3. 10: les résultats de Placement des pôles adaptatif (a) : sortie de système, (b) : signal
Abréviations
MCC : Le moteur à courant continu.
MDDP : Placement de pôles de degré minimal. MRAC: Model Reference Adaptive Control. PI : Proportionnelle -Intégrale
PID : Proportionnelle -Intégrale - Dérivée
RLS : Recursive Least Squares (L’algorithme de moindres carrés Récursif). SAMR : Le système adaptatif à modèle de référence.
SISO: Single Input Single Output (mono entrée mono sortie).
Introduction Générale
Depuis plus d’un siècle, le monde industriel a connu un énorme développement technologique, sous l’effet de la concurrence et des besoins de plus en plus exigeants en qualité et performances, les industriels ont été amenés à s’intéresser et à s’impliquer dans la recherche automatique et à suivre les dernières nouveautés des techniques de la commande et de régulation qui participent d’une manière essentielle à améliorer l’efficacité des processus de production, la qualité des produits et la rentabilité.
L’automatique a été définie comme étant une science qui utilise des méthodes théorique et des moyens technologiques pour la conception et la construction de systèmes automatisés. D’après les connaissances des automaticiens, la commande d’un processus consiste soit à éliminer « au mieux » une perturbation (problème de régulation), soit à faire en sorte que la sortie du processus suivi « au mieux » un signal de référence appelé aussi consigne (problème d’asservissement) lorsque ces deux problèmes sont combinés, nous parlons alors du problème conjoint d’asservissement et de régulation [1].
Lorsque les paramètres du système à régler varient dans un large domaine, il est possible que le dimensionnement robuste ne donne pas des résultats satisfaisants, il faut alors faire appel à un réglage adaptatif, qui permet l’ajustement automatique en ligne et en temps réel, des paramètres des régulateurs [2].
Parmi l’approche adaptative de la régulation nous nous sommes intéressés à la commande auto-ajustable indirecte par placement de pôles, qui fait l’objet d’un grand intérêt dans le milieu industriel, vu sa simplicité d’implémentation et son efficacité en pratique, cette technique permet de calculer les paramètres S, T et R de la boucle fermée et donc la dynamique et les performances du processus de commande.
Dans ce travail, nous nous proposons de concevoir et de mettre en œuvre en simulation, une technique de commande adaptative par placement de pôles. L’objectif est d’étudier le principe de cette approche et de mettre en application pour différents systèmes afin de vérifier le bien fondé de son efficacité.
Le premier chapitre donnera une idée générale sur les techniques de la commande adaptative nous introduisons le chapitre par l’une des techniques de la commande qui est la commande non adaptative (les régulateurs classiques). La partie suivante sera réservée pour l’autre technique qui est la commande adaptative car elle constitue l’objectif de notre travail en parlant sur les approches de cette commande (directes et indirectes), ainsi que les types de cette commande. Terminant ce chapitre par l’objectif de la commande adaptative.
Le deuxième chapitre sera consacré pour la présentation d’une méthode algébrique simple de conception de la commande adaptative. L’idée est de déterminer le régulateur qui impose les pôles désirés en boucle fermée. De plus, le but est de laisser le système suite le signal de référence d’une manière spécifiée. Cette méthode permet en plus d’avoir une meilleure compréhension de la commande adaptative.
Le troisième chapitre sera dédié à la présentation des plusieurs exemples de simulation et une application sur moteur à courant continuer, nous appliquons un algorithme qui est présenté dans le chapitre 2 où les simulations ont été exécutées sur MATLAB. L’objectif est de réguler un processus inconnu de manière à obtenir certaines performances.
En fin, la conclusion générale présentera le bilan de ce travail et les perspectives envisagées.
Chapitre 1
Généralités Sur les
techniques de
Chapitre 1 : Généralités Sur les techniques de commande
1.1
Introduction
De nous jours, l’automatique fait partie des sciences de l’ingénieur. Cette discipline traite de la modélisation de l’analyse, de la commande et de la régulation des systèmes dynamique. Des raisons économiques et sécurit, conduisent à la recherche d’une loi de commande de plus en plus performante afin de garantir l’efficacité et le rendement de production.
Nous introduisons ce chapitre par l’une des techniques de la commande qui est la commande non adaptative (les régulateurs classiques). Par la suite on s’intéresse sur l’autre technique qui est la commande adaptative car elle constitue l’objectif de notre travail en parlant sur les approches de cette commande (directes et indirectes), ainsi que ses types. Terminant ce chapitre par l’objectif de la commande adaptative.
1.2
Les techniques de commande (régulation)
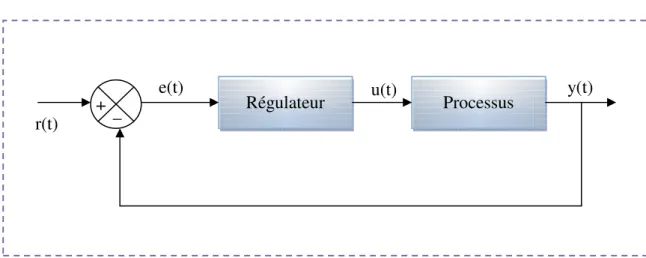
On appelle régulateur ou (contrôleur) la partie d’un système de commande comparant le signal de mesure y(t) avec le signal de cosigne r(t) afin de générer un signal de commande u(t) Figure (1.1).
Figure 1. 1: Schéma fonctionnel d’un processus réglé.
On peut classer les régulateurs selon deux grandes familles :
Régulateur Processus
r(t) + _
Les régulateurs classiques : les régulateurs classiques sont constitues d’une seule variable
d’entrée et d’une seule variable de sortie, exemple : les contrôleurs PI.
Régulateurs avancées : les régulateurs de type avancé ou dits de méthode sont constitués de
plusieurs variables d’entrée et de plusieurs variables de sortie [3].
1.2.1 La commande non adaptative (les régulateurs classiques) 1. Historique
L’histoire des régulateurs est déjà longue il est peut être intéressant de rappeler quelques étapes importantes de développement. Les premiers régulateur de type centrifuge apparaissent vers 1750 pour régler la vitesse de moulins à vent, suivi en 1788 du fameux contrôleur de vitesse de machine à vapeur de James Watt [4] ont proposé deux démarches permettant de trouver facilement les paramètres optimums pour une installation donnée. En quelques années, les propositions de Ziegler et Nichols [5] ont été adaptées ou modifiées selon les besoins.
Au début des années 1990 et dans le but de fournir des règles d’ajustement simples mais plus performantes que celles de Ziegler et Nichols, Ǻström [6] et ces collaborateurs on analyse le comportement dynamique d’un grand nombre de processus. Cette analyse a conduit à l’établissement de tableaux servant aux calculs P.I.D à partir de mesure simples. Ainsi divers méthodes de calcul des paramètres des régulateurs PID et une méthode d’auto-ajustable son proposées par Ǻström et Hägglund.
Parmi c’est régulateur en peut citer trois type :
2. Régulateur PI classique
Le régulateur PI classique relie directement le signal de commande u(t) au signal d’écart e(t). Sa description temporelle est la suivante :
= + (1.1) Avec l’écart (signal d’erreur) défini comme suit :
Où Kp et Ti (ki =1/Ti) sont les paramètres à régler du régulateur .sa fonction de transfert H s’écrit :
= = 1 +
(1.3)
E, U sont les signaux d’entré et de sortie du contrôleur.
Figure 1. 2: Schéma bloc d’un régulateur PI.
Les contrôleurs de type PI classique on atteint le maximum de leur possibilité. En effet, ceux-ci sont souvent mal réglés ou tout simplement utilisés à défaut d’autre choix, ce qui occasionne, entre autre, une diminution des performances [7].
3. Régulateur flou
Le principe de conception d’un régulateur flou consiste à exprimer la stratégie de régulation a partir d’objectifs de régulation et d’observations sur les entrées-sorties du processus sans analyse en détail la dynamique sous-jacente du système.
Le régulateur flou utilise des règles linguistiques qu’il est capable d’interpréter numériquement à fin d’établir une stratégie de régulation [8-9].
Ki/P K u(p) + + up(p) ui(p) ui(p) Correcteur PI
- La définition du formalisme linguistique.
- Le choix d’opérateurs mathématiques pour manipuler les variables floues [10].
• Structure d’un régulateur flou
La conception d’un système flou est constituée de trois étapes principales : la conversion des entrées en valeurs floues, l’évaluation des règles et la conversion du résultat des règles en une valeur numérique de sortie.
1. Fuzzification : pour transformer les grandeurs physiques (entrées) en une valeur linguistique (sous ensemble flou).
2. Module d’inférence : qui consiste deux blocs, le moteur d’inférence et la base des règles.
3. Défuzzification : que permet d’inférer une valeur nette (précise), utilisable en commande par exemple, à partir du résultat de l’agrégation des règles.
Figure 1. 3: Structure d’un régulateur flou [11].
Base de connaissances Interface de Fuzzification Interface de Défuzzification Logique de prise de décision Processus Contrôleur flou Flou Flou
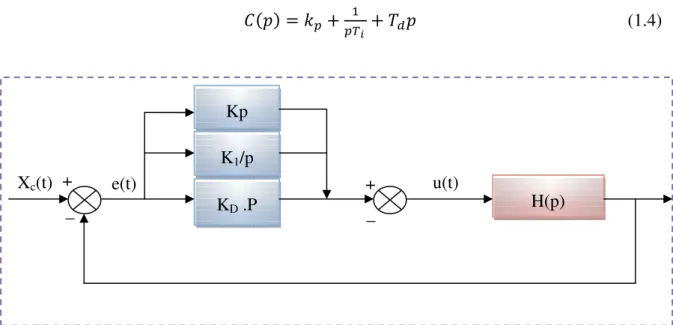
4. Régulateur PID
Le régulateur PID appelé aussi correcteur PID (proportionnel, intégral, dérivé) est un système de contrôle permettant d’améliorer les performances d’un asservissement, c’est-à-dire un système ou procédé en boucle fermée.
Ce régulateur injecte à partir de signal d’erreur Ɛ(t) une commande XC(t), il est insérer dans la chaine directe d’asservissement, [12] sa fonction de transfert est:
= +
+ !" (1.4)
Figure 1. 4: Schéma bloc d’un régulateur PID.
Jusqu'à maintenant les régulateurs conventionnels sont les plus utilisés dans les applications industrielles. Environ 90% des contrôleurs industriels sont des contrôleurs PID [13], il permet d’obtenir les meilleurs résultats, car, il améliore la stabilité, il rend le système plus précis, et augmente la rapidité.
L’adaptation d’un système à son environnement réside dans la possibilité de réagir face aux variations que peut subir cet environnement. Alors pour obtenir des meilleurs résultats, une méthode a été lancée et développée en utilisant les régulateurs avec des paramètres variantes. Cette technique est dite la commande adaptative.
Kp K1/p KD .P H(p) e(t) u(t) Xc(t) _ + + _
1.2.2 La commande adaptative 1. Historique
• L’origine de la commande adaptative remonte au début des années 50. • Conception d’autopilotes pour une large fourchette d’altitudes et de vitesses. • La commande adaptative a été motivée par ces problèmes de l’aéronautique. • Beaucoup de recherches ont été activement menées.
• Forts changements dans la dynamique quand l’avion change de point de fonctionnement. • Les contrôleurs par feedback à gains constant n’étaient pas capables de garantir les
performances désirées lors du changement de point de fonctionnement.
• Des approches de commande sophistiquées, telle que la commande adaptative, étaient nécessaires pour compenser ces fortes variations dans la dynamique de l’avion.
• La commande adaptative à modèle de référence a été proposée par Whitaker pour résoudre le problème de commande d’autopilotes.
• La méthode de sensibilité et la règle d’adaptation du MIT ont été largement utilisées. • Une méthode de placement de pôles adaptatif basée sur le problème linéaire quadratique
optimal a été proposée par Kalman.
• Méthode de sensibilité, règle du MIT, analyse de stabilité limitée (les années 60)
Whitaker, Kalman, Parks, etc.
• Méthode basée sur la technique de Lyapunov, de passivité (les années 70) Morse,
Narendra, Landau, etc.
• Preuves de stabilité globales (les années 70-80) Astrom, Morse, Narendra, Landau,
Goodwin, Keisselmeier, Anderson, etc.
• Questions de robustesse, instabilité (Début des années 80) Rohrs, Valavani, Athans, Marino, Tomei, Egard, Ioanno, Anderson, Sastryetc.
• Commande adaptative robuste (les années 80) Ioanno, Sun, Praly, Jiang, Tsakalis, Tao, Datta, Middleton, Basar, etc.
• Commande adaptative non linéaire (les années 90) Kokotovic, Ioannou, Narendra, Krstic, Xu, Wang, Anderson, Safonov, Bernstein, etc.
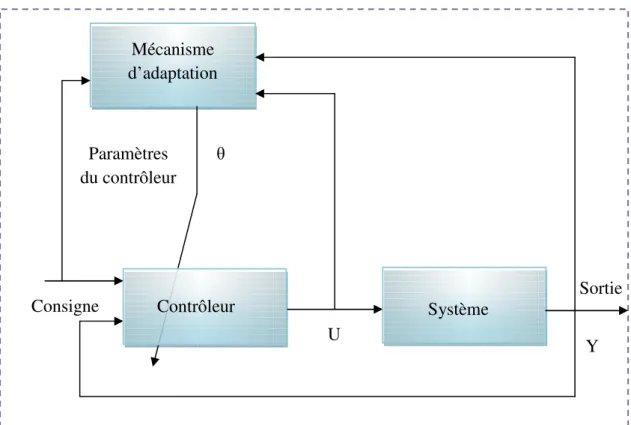
2. Principe général de la commande adaptative
La commande adaptative est définie comme une commande permettant au régulateur de s’adapter de lui-même aux changements du processus. En conséquence, l’objectif de la
commande adaptative est l’ajustement automatique en ligne et de régulateur des boucles de commande, afin de réaliser ou maintenir de façon identique un certain niveau de performances, quand les paramètres du procédé à commander varient dans le temps (en générale minimisation de l’erreur entre la consigne et la sortie) [27]. Un système adaptatif peut également s’envisager comme une structure à deux boucles, une boucle principale classique qui prend en compte les variations des signaux d’entrée et de sortie, et une boucle secondaire qui réagit aux variations des paramètres du processus : c’est elle qui rend le système adaptatif. Les différentes méthodes de commande adaptative se différencient par la structure choisie pour réaliser la remise à jour en temps réel des paramètres du régulateur en fonction des variations du processus à commander.
Principe général
La commande adaptative doit avoir une loi de commande et une estimation en ligne des
paramètres si les paramètres d’un système sont inconnus, varient dans le temps ou incertaine. Par contre elle n’a pas besoin d’informations préalables sur les limites sur ces paramètres.
Figure 1. 5: Principe de la commande adaptative.
Mécanisme d’adaptation Système Contrôleur Consigne U Sortie Y Paramètres du contrôleur θ
3. Les approches de la commande adaptative
La théorie de la commande adaptative compte actuellement un grand nombre d’approches et
de méthodes, et plusieurs applications industrielles ont été mis en œuvre. Les algorithmes de la commande adaptative peuvent être classés en deux classes :
1) Commande adaptative directe
La commande adaptative directe à modèle de référence (MRAC), encore appelée l’adaptation en ligne, a été proposée pour la première fois en 1961. Dans cette approche le processus à commander n’est pas identifié, et les paramètres du régulateur sont estimés directement selon une structure imposée par le concepteur. Le schéma de la Figure (1.6) illustre ce type de commande.
Figure 1. 6: Structure de la commande adaptative directe [14].
Algorithme d’adaptation paramétrique Traitement des données Procédé Superviseur Régulateur U(t) V W V(t) Logique de supervision
2) Commande adaptative indirect
La commande adaptative indirecte avec identification du modèle (MIAC), encore appelée commande auto-ajustable ou adaptation hors ligne, a été introduite dès 1958 par Kalman. Dans cette approche le calcul des paramètres du régulateur passe par l’estimation en temps réel des paramètres du processus à commander. Le schéma de principe de ce type de commande est illustré Figure (1.7).
Figure 1. 7: Structure de la commande adaptative indirecte [14]. 4. Types de Commande adaptative
Il existe principalement trois types d’approches de commande adaptatives :
_ Algorithme d’adaptation paramétrique Traitement des données Procédé Superviseur Régulateur U(t) V W Synthèse du régulateur Logique de supervision V(t)
a. Commande adaptative a Modèle De Référence (MRAC)
C’est l’une des approches de la commande adaptative les plus utilisées, dans laquelle les performances désirées sont spécifiées par le choix d’un modèle de référence [15]. Cette approche a été développée par Whitaker et ses collègues en 1958 [16]. Le système adaptatif à modèle de référence (SAMR), est une manière pratique d’imposer des spécifications au système de commande. Un schéma bloc représentant le principe de cette approche est donné dans la figure (1.8).
Ce modèle de référence donne une indication sur comment la sortie du système doit idéalement répondre à un signal de commande.
Le système possède une boucle de réaction (feedback) ordinaire composée du processus et du régulateur et une autre boucle de réaction (feedback) qui permet de changer les paramètres du régulateur.
Figure 1. 8: Schéma-bloc d’un Système Adaptatif à Modèle de Référence (SAMR). i. Réalisation du régulateur SAMR
Maintenant on va définir un système adaptatif à modèle de référence (SAMR) pour l’ajustement de paramètre du régulateur. On considère un processus SISO. On suppose que toutes les dynamiques sont linéaires.
Modèle Mécanisme d’ajustement Processus Régulateur Ym Paramètre du Régulateur R U Y
L’idée clé est que le régulateur peut être paramétré de manière à ce que l’erreur soit linéaire par rapport aux paramètres du régulateur.
La méthode de conception du régulateur peut être résumée comme suit :
Trouver une structure de régulateur qui permet une poursuite parfaite de la sortie. Calculer l’erreur de modèle.
Utiliser la loi d’ajustement des paramètres ou la loi normalisée.
ii. Différentes structures des systèmes de la MRAC
De par les liens existant entre la prédiction et l’estimation d’une part et la commande d’autre part, on peut considérer trois structures de systèmes adaptatifs [17].
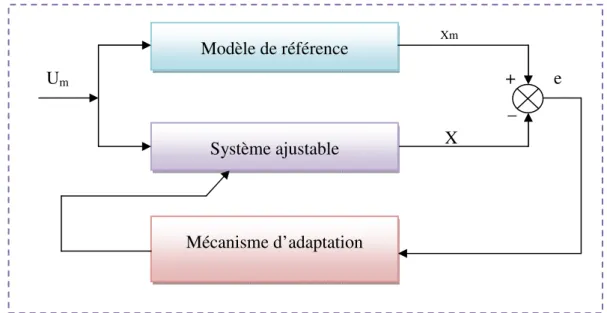
1) Structure parallèle : c’est la structure la plus connue, nommée la méthode de
l’erreur de sortie dans le cas de l’identification figure (1.9).
Figure 1. 9 : Structure parallèle.
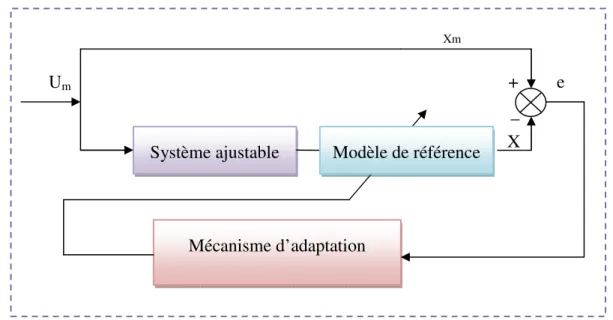
2) Structure série : dans ce cas le modèle de référence et le système ajustable sont en
série figure (1.10) cette structure est souvent connue par la méthode de l’erreur d’entrée. Modèle de référence Mécanisme d’adaptation Système ajustable Xm e X + _ Um
Figure 1. 10: Structure série. 3) Structures série-parallèle :
Dans cette structure on distingue deux cas :
Le système ajustable est placé d’une part en série avec le modèle de 0référence d’autre part, en parallèle avec celui-ci figure (1.11).
Figure 1. 11: Structure série-parallèle.
Mécanisme d’adaptation Système ajustable Xm e X + _ Um Modèle de référence Mécanisme d’adaptation Xm e X + _ Um Modèle de référence Système ajustable Système ajustable
b. Commande adaptative à Gain Programmé
La commande à grand gain est un outil bien connu et populaire pour la stabilisation robuste des systèmes de commande qui satisfont certaines hypothèses sur le processus. Dans le but de trouver la valeur nécessaire du paramètre grand gain, certaines propriétés du processus à commander, comme l’ordre du système, le signe de son gain en hautes fréquences et l’amplitude de l’incertitude doivent être connues. Un schéma bloc représentant le principe de cette approche est donné dans la figure (1.13).
Cette approche a été initiée par Morse en 1983 [18], Mareels [19], Willems et Byrnes [20] et Mårtensson [21] pour les systèmes linéaires invariants dans le temps.
La commande dispose de deux boucles :
• Peut être vue comme une transformation de l’espace des paramètres du système à l’espace des paramètres du contrôleur.
• Peut être implémentée comme une ‘lookuptable.
Figure 1. 12: Schéma-boc d'un système adaptatif à Gain programmé.
Programme du gain Processus Contrôleur Contrôle du Paramètre Sortie Contrôle de signal Commande signal Cosigne
c. Commande Auto-Ajustable(STR)
C’est l’une des commandes adaptatives indirectes, utilisés dans le calcul des paramètres du contrôleur. A l’origine de la commande à modèle de référence trait les problèmes de l’asservissement alors que le contrôleur auto-ajustable était destiné aux problèmes de régulation. Un schéma bloc représentant le principe de cette approche est donné dans la figure (1.14).
L’architecture de commande contient deux boucles [22-23] :
• Une boucle principale, représentant la boucle de réglage conventionnelle.
• Une boucle superposée à la boucle principale, composée d’un bloc d’identification du processus et d’un bloc de calcul des paramètres du régulateur.
Figure 1. 13: Schéma-bloc d’un Système Adaptatif Auto-Ajustable(STR).
Identification Processus Contrôleur Contrôleur de Conception Régulation auto-régulée Paramètres du processus Spécification Référence Entrée Sortie
i. Identification des systèmes 1) Principe
L’identification d’un système ou d’un procédé consiste à déterminer les caractéristiques dynamiques du procédé ou du système à partir des mesures. Elle est donc une approche expérimentale pour la détermination du modèle dynamique du système. L’identification nous permet d’éviter les purement théoriques à partir des équations différentielles que sont longue à obtenir et souvent trop complexes. Elle comporte quatre étapes :
• Acquisition des entrées/sortie sous un protocole d’expérimentation. • Choix de la structure du modèle.
• Estimation des paramètres du modèle.
• Validation du modèle identifié (structure et valeur des paramètres).
2) Avantage
L’indentification d’un système procure les avantages suivants :
- Obtention d’une estimation du modèle au fur et à mesure que le procédé évolue.
- Compression importante des données.
- Nécessite moins de puissance de calcul et de mémoire. - Mise en œuvre facile sur microprocesseur.
- Identification en temps réel si nécessaire.
- Possibilité de pour suite des paramètres variables dans le temps.
ii. Algorithme d’identification 1) Modèle de processus
Considérant un modèle mono variable(SISO), invariant discret décrit par :
# $% = & $% ' − ( + ) − ( (1.5)
Avec d=n-m
u : entrée de processus.
d : retard pur en nombre de période d’échantillonnage. y : sotie de processus et v est une perturbation.
2) Moindre carrée récursif
L’objectif est de minimiser un critère quadratique correspondant à la somme des carrées de l’écart entre la sortie réelles du processus à identifier et celle du modèle obtenu à chaque instant d’échantillonnage [24].
iii. Régulateur RST
La synthèse d’un régulateur RST se fait directement par une méthode de déplacement de pôles algébriques et univoque à partir du modèle discret du système. Contrairement à la méthode de synthèse dans le diagramme de Bode, ou en utilisant un modèle fréquentiel du système à commande, le régulateur RST utilise un modèle paramétrique du système.
La structure d’un régulateur RST est donnée par la figure ci-dessous ou R, S et T sont des polynômes en z-1. La fonction de transfert Hm (z-1) d’un modèle à poursuivre (modèle de référence), et donnée par, [25] :
1 $% = $%"∗3456789
:4678 (1.6)
Ou : Am : est un polynôme Monique (Am (0)=1). d : est un retard pur du procédé.
Figure 1. 14: principe de la synthèse du régulateur RST.
Calcul les polynômes R, S et T
Le calcul des polynômes R, S et T se fait en identifiant la fonction de transfert modèle référence et la fonction du système bouclé corrigé, [26].
Il existe deux types de commande auto-ajustable :
1. Commande Auto-Ajustable indirecte :
Lorsque les paramètres du processus ont été identifiés, ils sont alors transmis au bloc de calcul des paramètres du régulateur. Ce dernier, en fonction des paramètres reçus et de spécifications définies par le cahier de charges (rapidité, amortissement, …) va mettre à jour automatiquement les nouveaux paramètres du régulateur et les lui transmettre, permettant ainsi une mise à jour de ce dernier. Le cycle ainsi décrit va se répéter durant tout le temps de fonctionnement de la boucle de réglage.
2. Commande Auto-Ajustable directe :
L’avantage des algorithmes Directs des régulateurs auto-ajustables par rapport aux algorithmes Indirects est que ces derniers demandent plus de calculs et sont parfois mal
T (z-1) 1/R (z-1) U(k) H (z-1) + _ Y(k) S (z-1) = Hm (z-1) Yc (z-1) Y (z-1)
Directs est d’utiliser les équations de conception pour reparamètriser le modèle en terme des paramètres du régulateur. Cette reparamètrisation est aussi une clé pour la compréhension de la relation entre les SAMR et les régulateurs auto-ajustables.
5. L’objectif de la commande adaptative
La réalisation d’une commande ajustable.
L’estimation des paramètres du processus (modèle estimé). Le calcul le régulateur en ligne.
Les difficultés d’implémentation de la commande adaptative sont :
Le temps du calcul est important pour l’implémentation en ligne.
De garantir la stabilité et la convergence désirée par rapport à la référence.
1.3
Conclusion
Dans ce chapitre, nous avons parlé sur les techniques de commande d’une manière globale où on a présenté deux commandes qui sont la commande non adaptative et la commande adaptative en insistant sur cette dernière par ce qu’elle consiste l’objectif de notre mémoire. Cette étude nous a permis de constater que l’adaptation d’un système à son environnement répond au besoin des chercheurs.
Dans le chapitre suivant, nous évoquerons la commande adaptative indirecte par placement de pôles.
Chapitre 2
Commande
adaptative indirecte
par placement de
21
Chapitre 2 : Commande adaptative indirecte par placement de
pôles
2.1 Introduction
L’une des techniques de commande qui a connu une grande notoriété dans les applications industrielles, est la commande adaptative, qui comme son nom l’indique, consiste à adapter le régulateur en ligne aux variations du processus régulé pour assurer une qualité constante des performances [27]. Dans ce chapitre on présentera une méthode algébrique simple de conception de la commande adaptative. L’idée est de déterminer le régulateur qui impose les pôles désirés en boucle fermée. De plus, on veut que le système suive le signal de référence d’une manière spécifiée. Cette méthode permet en plus d’avoir une meilleure compréhension de la commande adaptative.
Figure 2. 1 : schéma bloc d’un régulateur auto-ajustable. Conception de Contrôleur Estimation Contrôleur Processus Référence Contrôleur paramètres Sortie Paramètres de Processus Spécification Entrée
2.2 Conception placement de pôles
C’est une méthode simple dont l’idée est de déterminer un contrôleur qui donne les pôles désirés en boucle fermée, de plus elle exige que le système suive des signaux de commande d’une manière spécifiée [21].
2.2.1 Modèle du processus :
On considère un processus décrit par un système à une entrée et une sortie (SISO). Même si on traitera essentiellement des systèmes discrets, on peut étudier simultanément les systèmes continus en écrivant :
A y t = B u t + v t (2.1) Où A et B représentent des polynômes, soit de l'opérateur différentiel = ⁄ ou l'opérateur de décalage en avance q. On suppose que A et B sont relativement principaux, c-à-d, qu'ils n'ont aucun facteur commun. De plus, on le suppose que A est Monique, c-à-d, que le coefficient de la puissance la plus élevée dans A est l’unité [28].
A & B sont des polynômes dont : = et = − d d est excédant des pôles.
∗ = Α
Le modèle peut être décrit comme suit :
∗ y t = Β∗ − + ! − d
Où
∗ = 1 + # +. . . … #
Β∗ = & + & +. … … + &' ' Avec : ( = − d
Un régulateur linéaire général
23
Où ), , * sont des polynômes. Cette loi de commande représente un contre réaction négative avec l'opérateur de transfert −, )⁄ et une action dans le sens direct avec l’opérateur* )⁄ . Il possède donc deux degré de liberté.
Figure 2. 2: Un régulateur linéaire général à deux degrés de liberté.
Un schéma fonctionnel du système en boucle fermé est montré dans figure (2.2). L’élimination de entre les deux équations (2.1) et (2.2) donne les équations suivantes pour le système en boucle fermé :
y t = B* A) + Β, + + Β) A) + Β,!
=
/0 /12Β3 ++
Β3 /12Β3!
(2.3)Le polynôme caractéristique en boucle fermé est donc :
) + , = + (2.4) L'idée principale de la méthode de conception est de spécifier le polynôme de caractéristique désiré en boucle fermé +. Les polynômes R et S peuvent alors être résolus De l’équation. (2.4). Noter que du procédé de conception nous considérons comme étant le +. Polynôme un paramètre de conception qui est choisi pour donner les propriétés désirées au système en boucle fermé. L'équation (2.4), qui joue un rôle fondamental dans l'algèbre, s'appelle l'équation Diophantine. Ce s'appelle également l'identité de Bezout ou l'équation
d'Aryabhatta. L'équation a toujours des solutions si les polynômes A et B n'ont pas des
)4= *45− ,- Ʃ U Ur U Y Processus Régulateur
facteurs communs. La solution peut être mal conditionnée si les polynômes ont des facteurs qui sont étroits. La solution peut être en introduisant des polynômes avec des coefficients inconnus et résoudre les équations linéaires obtenues.
2.2.2 Poursuite de modèle :
L'équation Diophantine (2.4) détermine seulement les polynômes R et S.D'autres conditions doivent être présentées pour déterminer également T polynôme dans le contrôleur (2.2). Pour faire ceci, nous exigerons de que la réponse du signal de référence + soit décrite par la dynamique
'-' = ' + (2.5) Il vient alors de l’équation. (2.3) que la condition suivante doit être vérifiée :
60 /12Β3
=
60 78=
9: 7: (2.6) Cette condition pour suite de modèle indique que la réponse du système en boucle fermée aux signaux de référence soit spécifique par le modèle (2.5). Si la poursuit de modèle peut être réalisé dépend du modèle, du système, et du signal de commande. S’il est possible d’annuler l’erreur pour tous les signaux de référence, alors la poursuite parfaite du modèle est réalisée.Maintenant, on discute des conséquences de la poursuit de modèle. L’équation (2.6) implique qu’il existe des simplifications des facteurs communs de B*et ;.on factorise le polynôme comme suit :
= 2 (2.7) Où 2 est un polynôme Monique dont les racines sont stables et si bien amorties qu’un peut les compenser par le régulateur correspond aux facteurs instables ou faiblement amortis.
Il s’en suit que doit être un facteur de ' soit ;
25
Puisque 2 doit être un facteur de ; .le polynôme caractéristique de la boucle fermée prend donc la forme :
+ = ' 2 (2.9) Puisque 2 est un facteur de B et +, il vient de l’équation (2.4) qu’il divise R aussi, soit :
) = )′ 2 (2.10) Et l’équation Diophantique (2.4) est réduire à :
)′+ , = ' = ′+ (2.11) En introduisant les équations (2.7), (2.8) et (2.9) dans l’équation (2.6) on obtient :
* = '′ (212)
2.2.3 Condition de causalité :
Pour obtenir un régulateur qui est causal dans le cas de temps discret ou approprié dans le cas continu, nous devons imposer les conditions :
, ≤ )
* ≤ ) (2.13) L'équation Diophantine (2.4) a beaucoup de solutions parce que si ) et , sont des solutions, alors est ainsi
) = ) + =
, = , − = (2.14) Où Q est un polynôme arbitraire. Puisqu'il y a beaucoup de solutions, nous pouvons choisir la solution qui donne un régulateur du plus petit degré. Nous appelons ceci la solution de degré minimal. Depuis le > , la limite de d'ordre suprême du côté à gauche de l’équation. (2.4) est ). Par conséquent
) = + −
Nous pouvons toujours trouver ainsi une solution dans laquelle le degré de S est tout au plus le degré A−1.
Ceci s'appelle la solution de degré minimal de l'équation Diophantine. Le degré R ≤ du degré S de condition implique ainsi cela
+ ≥ 2 − 1
Il vient de l’équation. (2.12) que la condition * ≤ ) implique que
'− '′ ≥ − 2
En ajoutant le degré aux deux côtés, il vient de l’équation (2.12) que la condition deg '-deg ' ≥ .où est le degré relatif du processus.
Cela veut dire dans le cas discret que le temps de retard du modèle doit être au mois égal au temps de retard du processus, ce qui est une condition très naturelle. En résumé, les conditions de causalité (2.13) peuvent être récrites ainsi
+ ≥ 2 − 1
'− ' ≥ − = (2.15) Il est normal de choisir une solution dans laquelle le contrôleur a le plus bas possible degré. Dans le cas de temps discret il est également raisonnable d'exiger qu'il n'y ait aucun retard supplémentaire dans le régulateur. Ceci implique que les polynômes R, S, et T doivent avoir les mêmes degrés. La procédure de conception obtenus appelée aussi placement de pôles de degré minimal peut être résumée dans l’algorithme suivant :
Algorithme : placement de pôles de degré minimal (MDPP) :
Données : polynômes A, B.
Spécifications : polynômes ' , 'et Conditions de compatibilité :
27
' =
≥ − 2− 1
' = '′
Etape1 : factoriser B tel que = 2 , où 2Monique.
Etape 2 : trouver la solution )′et S avec , < à partir de )′+ , =
'
Etape 3 : a parti ) = ′ 2 et * = '′ calculer le signal de commande en utilisant la loi de commande ) = * +-Sy
Il existe certains cas spéciaux intéressants de cette procédure : composés
Tous les zéros sont compensés :
La procédure de conception simplifiée de manière significative dans le cas spécial dans lequel tous les zéros de processus sont compensés ; alors
= − − 1 = − 1 (2.16) Il est naturel de choisir ' = ' 1 BC.la factorisation dans l’étape 1 devient très
simple, et on obtient = & , 2 = ⁄ .de plus * =& '′ = BC ' 1 &⁄ et
l'équation Diophantine dans l'étape 2 réduit à )′+ & , =
+
′ =
' (2.17) Il est facile résoudre cette équation parce que R ′ est le quotient et & , est le reste quand 'est divisé par . Cependant, tous les zéros de processus doivent être stables et bien amortis pour permettre cette compensation [29].
Aucun zéros n’est compensé :
La factorisation de l’étape 2 devient aussi très simple si aucun zéro n’est compensé. On
a 2 = 1, = et ' = D , où D = ' 1 ⁄ 1 .de plus
= − − 1 et * = D .le polynôme caractéristique de la boucle fermée est + = ', et l’équation Diophantine de l’étape 2devient :
) + , = + = ' 2.18
2.2.4 Interprétation de polynôme A0 :
Il est possible de donner une interprétation du polynôme qui apparaît dans la solution du problème de placement de pôles dans le cas dans de degré minimale. Pour cela, nous observons que le problème de placement de pôles peut être aussi résolu avec la rétroaction d'état et un observateur. La dynamique en boucle fermé se compose alors de deux parties : la première correspond au retour d'état et un autre qui correspondent à la dynamique d'observateur.
Pour un système du degré n on le sait également qu'il est suffisant d'employer un observateur n-1, du degré n. Quand aucun zéro de processus n'est décommandé, le polynôme caractéristique en boucle fermé dans notre cas est ' où ' est du degré n et est du n- 1. Par cette analogie nous pouvons interpréter le polynôme 'comme étant associé à retour d'état et à comme étant associé à l'observateur. Nous appellerons donc le polynôme d'observateur.
Dans un système avec retour d'état il est également normal de présenter les signaux de commande de telle manière qu'ils ne produisent pas des erreurs d'observateur. Ceci signifie que le polynôme d'observateur est décommandé dans la fonction de transfert du signal de commande pour traiter le rendement.
2.2.5 Relation avec la commande à modèle de référence :
Nous montrons que la loi de commande donnée par (2.2) peut être interprétée comme modèle de référence. D’après les équations (2.11) et (2.12) on trouve :
* ) = ' '+ , ' ) '
La loi ce commande (2.2) peut s’écrit comme suit :
=
0 1 +−
3 1- =
79: 97: ++
39: 17: +−
3 1-
29
Une représentation de schéma fonctionnel de ce régulateur est donnée dans figure (2.3), La figure prouve que le contrôleur peut être interprété comme combinaison d'un contrôleur de réaction et d'un contrôleur de rétroaction. Le contrôleur de réaction essaye de décommander la dynamique d'usine et de la remplacer par la réponse du modèle '⁄ ' [31].
Figure 2. 3: Représentation alternative de modèle de référence basée sur le retour de la sortie
[27].
2.3 Commande auto-ajustable
2.3.1 Commande auto-ajustable indirecte a. Estimation
Plusieurs méthodes récursives d’estimation peuvent être utilisées pour estimer les coefficients des polynômes A et B. dans la suit, nous allons utiliser l’estimateur des moindres carrés récursifs. Le modèle du processus (2.1) Peut écrit explicitement comme suit en omettant le bruit F pour simplifier [32]
,
- = −# - − 1 − #G- − 2 − ⋯ − # - − + & − + ⋯ + &' − − (
Noter que le degré du système est (#I , ( + 0 . Le modèle est linéaire par rapport aux paramètres et peut être écrit,
-1 , ) Ʃ Ʃ ' ' Ym U Y Uc
- = K0 − 1 L (2.20) Ou : L0 = # # G… … … # & … … &' K0 − 1 = −- − 1 … . −- − − 0 … . . − 0− ( L’estimateur des moindres carrés avec oubli exponentiel est donné par :
L0 = LM − 1 + N O (2.21) O = - − K0 − 1 LM − 1 (2.22)
P = − 1 K0 − 1 Q + K0 − 1 − 1 K − 1 (2.23) = Ι − N K − 1 − 1 Q⁄ (2.24) Si le signale d’enter du processus est suffisamment excitant et la structure du modèle estimé est compatible avec le processus, les estimations vont converger à leurs vraies valeurs. Cela prend (#I , ( + 0 périodes d’échantillonnage avant que le vecteur de régression ne soit défini. Dans le cas déterministe cela prend au moins + ( + 1 autres périodes pour déterminer les + ( + 1 paramètres du modèle, en supposant que l’entrée du processus est suffisamment et continument excitante. Cela donc prend au moins
S = + ( + 1 + max , ( + 0 (2.25) Périodes d’échantillonnage pour l’algorithme de convergence.
2.3.2 Commande auto-ajustable directe
L’avantage des algorithmes directs des régulateurs auto-ajustables par rapport aux algorithmes indirects est que ces derniers demandent plus de calculs et sont parfois mal-conditionnées par certaines valeurs des paramètres. Dans le cas des régulateurs directs, les calculs de conception sont simplifiés ou carrément éliminés [27].
31
2.4 Conclusion
Dans ce chapitre nous avons présenté la méthode de conception de placement de pôles et l’idée principale de cette méthode, et nous avons présenté un algorithme de placement de pôles de degré minimal (MDPP), dans la suite nous allons appliquer cette algorithme dans des exemples de simulation.
Chapitre 3
Applications &
simulations
Chapitre 3 : Simulations & Applications
3.1
Introduction
Jusqu’à un passé récent, les machine à courant continu ont été majoritairement utilisées dans les entrainements à vitesse variable. Ceci tient au fait que son fonctionnement est d’une grande simplicité, de même que sa modalisation, mais surtout à ses performances statiques est dynamique exceptionnelles.
Dans ce chapitre nous allons présenter plusieurs exemples de simulation et une application sur moteur à courant continuer, on applique l’algorithme qui présenté dans le chapitre 2, les simulations ont été exécutées sur MATLAB. L’objectif est de réguler un processus inconnu de manière à obtenir certaines performances.
Environnement de travail
Dans cette section, nous donnerons une brève présentation des environnements matériels et logiciels de notre travail.
• Environnement matériel : Un ordinateur « hp » caractérisé par :
- Processeur : Intel ® core™ i3-600 6U CPU @ 2.00 GHz. - RAM : 4.00 Go.
- Disque dur : 500 Go.
- Système d’exploitation : Microsoft Windows 8. • Environnement logiciel :
Nous avons utilisé l’environnement de programmation « MATLAB R2016a ». MATLAB est un environnement de calcul intégré, basé sur un langage de programmation qui permet le développement rapide d’applications. Le langage permet la manipulation d’objets mathématiques à l’aide de fonctions. Il dispose des fonctions de calcul de base ainsi que des bibliothèques spécialisées.
3.2
Exemples de Simulation
3.2.1 Placement de pôles fixe :
3.2.1.1 Exemple 1 :(modèle avec annulation zéros)
Dans ce cas on suppose qu’on connait le modèle du processus Modèle de processus :
Considérer un processus de temps continue décrit par:
= 1+ 1 3.1
Le modèle échantillonné avec une période : Te= 0.5s Est donnée par la fonction de transfert suivante :
= = + + + = 0.1065 + 0.0902− 1.6065 + 0.6065 3.2 Modèle de référence : = = + + = − 1.3205 + 0.4966 3.30.1761 On calcul du régulateur , , : On a: !"# = !"#$ − !"#$ (3.4) On calcule le !"#$ : !"#$ = 2!"#$ − 1 !"#$ = 2 ∗ 2 − 1 !"#$ = 3 (3.5)
!"# ≤ !"# !"# = 1 !"# ≤ !"# !"# = 1 !"#$ = !"#$ − !"#'(− 1 !"#$ = 1
Le codage sous Matlab est donné par les équations récurrentes suivantes : Equation récurrente d’un système :
) + 1 = 1.607 ) − 0.6065 ) − 1 + 0.1065 ) + 0.0902 ) − 1 (3.6)
Et l’équation récurrente d’un modèle ;
) + 1 = 1.3205 ) − 0.4966 ) − 1 + 0.1761 ) (3.7) La loi de commande (RST) : ) + 1 = *−+, +-. ) + * + /-+- . ) + 1 − ) + 1 − ) (3.8) Le résultat de simulation :
On applique l’algorithme dans le chapitre 2 de placement de pôles de degré minimal
(MDPP), et les valeurs initial comme suit :
U(1)=0, U(2)=0, Y(1)=0, Y(2)=0, Ym(1)=0, Ym(2)=0, on obtient les résultats de la figure (3.1).
Figure 3. 1 : Les résultats de modèle avec annulation zéros (a) : sortie de système, (b) : signal
de commande, (c) : signal d’erreur.
3.2.1.2 Exemple 2 : (modèle suivre sans annulation zéros)
Le modèle de processus :
Considérer le même processus que dans l'exemple 1 de l’équation (3.1) et la fonction de transfert de l’équation (3.2), mais employer une conception de commande dans sans aucune annulation de zéro du processus. Puisque le processus est du deuxième ordre, la solution de
(a) (b) (c) 0 10 20 30 40 50 60 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 temps (s) 0 10 20 30 40 50 60 -0.5 0 0.5 1 1.5 2 temps(s) 0 10 20 30 40 50 60 0 0.5 1 1.5 2 2.5 temps(s) ym y uc S o rt ie d e sy st èm e S ig n al d e co m m an d e S ig n al d ’e rr eu r Y Ym Uc
Le modèle de référence :
= = 0 + + + = 0.0953 + 0.0808− 1.32 + 0.4966 3.9
Où
= 0
et0 =
(2/,(2/3+-(+,
On calcul du régulateur , , : a partir de l’équation (3.4) et (3.5) et on trouve !"# = 1, !"# = 1, !"# = 1
Ce qui donne à unité le gain équilibré. Selon L'équation Diophantine (2.17) on obtient :
+ + + 4 + + + = + + + 3.10
Les équations récurrentes est donnée comme suit : Equation récurrente d’un système :
) + 1 = 1.607 ) − 0.6065 ) − 1 + 0.1065 ) + 0.0902 ) − 1 3.11 Et l’équation récurrente d’un modèle ;
) + 1 = 1.3205 ) − 0.4966 ) − 1 + 0.0953 ) + 0.0808 ) − 1 3.12
La loi de commande (RST) :
) + 1 = −4 ) + 0.8953 ) + 1 + 0.8057 ) − ) + 1 − ) 3.13
Le résultat de simulation :
3.2.1.3 Exemple 3 : (Système en temps continu)
Modèle de processus :
C’est Le même processus dans les exemples1 et 2 de l’équation (3.1) Modèle de référence : 0 10 20 30 40 50 60 0 0.5 1 1.5 2 2.5 Temps(s) 0 10 20 30 40 50 60 -1 -0.5 0 0.5 1 1.5 2 Temps(s) 0 10 20 30 40 50 60 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 temps (s) (a) (c) (b)
Figure 3. 2 : Les résultats de modèle suivre sans annulation zéros (a) : sortie de
système, (b) : signal de commande, (c) : signal d’erreur
S o rt ie d e sy st èm e Y Ym Uc S ig n al d ’e rr eu r S ig n al d e co m m an d e
= '$ = + 27556
6 + 56 314 Avec les paramètres suivants choisis en fonction de la dynamique du modèle de processus : 56 = 1 4 !/ , 7 = 0.7
Après l’échantillonnage avec le période 9 = 0.5 et en trouve la fonction suivante :
= = 0.09833 + 0.0778− 1.32 + 0.4966 3.15
Calcule du régulateur R, S, T : à partir de l’équation (3.4), (3.5) on obtient : !"# = 1 , !"# = 1, !"# = 1
!"#$ = !"#$ − !"#'(− 1 3.16 !"#$ = 1
A partir de l’équation de Diophantine (2.17), on trouve :
− 1.607 + 0.6065 + 4 + 0.1065 + 0.0902 +
:−1.607 + 4 + 0.1065 = −0.52 1 0. .6065 − 1.6074 + 0.1065 + 0.0902 = −0.5594 0.60654 + 0.0902 = 0.3973 3 2 ;
On résoudre la solution de l’équation à 3 inconnus :
= 2.6373, = −1.0161, 4 = 0.5040
= 0$ L’équation récurrente de système :
) + 1 = 1.607 ) − 0.6065 ) − 1 + 0.1065 ) + 0.0902 ) − 1 3.17
L’équation récurrente de modèle :
) + 1 = 1.32 ) − 0.4966 ) − 1 + 0.09833 ) + 0.0778 ) − 1 3.18 La loi de commande :
) + 1 = −4 ) + < ) + 1 + < ) − ) + 1 − ) 3.19
Le résultat de la simulation : la figure (3.3) montre les résultats de l’exemple 3.2.1.3
Commentaires
:
D’après les résultats de simulation de placement de pôles fixé, et d’après les figures (3.1), (3.2) (3.3), on obtient les remarques suivantes :
-la sortie y du système suit parfaitement la référence ym.
0 10 20 30 40 50 60 0 0.5 1 1.5 2 2.5 temps (s) 0 10 20 30 40 50 60 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 temps (s) 0 10 20 30 40 50 60 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 temps (s) (a) (c) (b)
Figure 3. 3: (a) :Les résultats de Système en temps continu (a) : sortie de système, (b) : signal de commande, (c) : signal d’erreur.
Y Ym Uc S o rt ie d e sy st èm e S ig n al d e co m m an d e S ig n al d ’e rr eu r
3.2.2 Placement de pôles adaptatifs :
Dans cette seconde partie on suppose qu’un le modèle du processus est inconnus.
3.2.2.1 Exemple1 : (modèle sans annulation de zéros)
C’est le même processus de l’exemple 3.2.1.1 de l’équation (3.1) et la fonction de transfert est donne par l’équation (3.2), 9 = 0.5
Le modèle de référence : c’est le même de l’exemple 3.2.1.1.de l’équation (3.3) et (3.4)
L’Estimation : On utilise l’estimateur des moindres carrés qui donner par les équations,
(2.17), (2.18), (2.19), (2.20).
Calcule des paramètres du régulateur STR : , , 4 , Selon l’équation Diophantine (2.17)
+ + + 4 + + + = + + + 3.20 On trouve : 4 = 0 =2 02+* 2− =2− 0 =1 0 1+ 1+ =1− 1 12. 1 2− 1 0 1+ 2 02
=
+,>2-2/,?23?2/,2,(2, 3(2/3?2,2-@ +,3?2,+-+,(23+-3+
+- 2/,23?2,23?2-2/3(2-23 +,3?2,+-+,(23+-3=
+, 2,23?2/,23(2-2/3?2-2/3?2-23 +,3?2,+-+,(23+-3+
+->232/3?233?2-2/32,(2-232/,@ +,3?2,+-+,(23+-3 = 0 + La loi de commande : ) + 1 = −4 ) + < ) + 1 + < ) − ) + 1 − ) 3.21 La figure (3.4) montre les résultats de l’exemple 3.2.2.1, avec les paramètres suivants : Observateur $ = 1Les valeurs initiales :
0 = 0, 0 = 0; BC = D−1.60 0.50 0.10 0.12E Paramètre d’adaptation F = 0.9.
Figure 3. 4:Les résultats de modèle sans annulation de zéros (a) : sortie de système, (b) : signal de commande, (c) : évaluation des paramètres, (d) : signal d’erreur.
3.2.2.2 Exemples 2 : (Modèle suivre avec annulation zéros)
0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 1 1.5 2 temps (s) 0 5 10 15 20 25 30 35 40 45 50 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 temps (s) 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 2 2.5 temps (s) ym y uc 0 5 10 15 20 25 30 35 40 45 50 -2 -1.5 -1 -0.5 0 0.5 1 temps (s) (b) (a) (d) (c) Y Ym Uc S ig n al d ’e rr eu r E v al u at io n d es p ar am èt re s S o rt ie d e sy st èm e S ig n al d e co m m an d e
Et on utilise les paramètres de l’estimateur de moindre carré à partir les équations (2.17), (2.18), (2.19), (2.20).
Calcule des paramètres du régulateur STR : , , 4, Selon l’équation Diophantine (3.16):
+ + . 1 + + = + + 3.22
Ces équations peuvent être résolues si ≠ 0 . La solution est :
= − = − 4 = ⁄ = $ 'I = La loi de commande : ) + 1 = − *+, +-. ) + * + /-+- . ) + 1 − ) + 1 − ) 3.23
La figure (3.5) qui montre les résultats de cet exemple, avec les paramètres suivants : Observateur $ = 1
Les valeurs initiales :
1 = 0, 2 = 0, 1 = 0, 2 = 0; BC = D−1.60 0.50 0.10 0.12E Paramètre d’adaptation F = 0.9
Figure 3. 5: Les résultats de Modèle suivre avec annulation zéros (a) :
Sortie de système, (b) : signale de commande, (c) : évaluation des paramètres, (d) : signal d’erreur.
3.2.2.3 Exemples 3 : (Système en temps continu)
C’est le même modèle de processus et modèle de référence dans l’exemple 3.2.1.de l’équation (3.1) et (3.9), avec les fonctions de transfert (3.2) et (3.15)
0 5 10 15 20 25 30 35 40 45 50 -1 -0.5 0 0.5 1 1.5 temps (s) 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 2 2.5 temps (s) ym y uc 0 5 10 15 20 25 30 35 40 45 50 -2 -1.5 -1 -0.5 0 0.5 1 temps (s) 0 5 10 15 20 25 30 35 40 45 50 -0.35 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 temps (s) (b) (a) (d) (c) Y Ym Uc S ig n al d e co m m an d e S ig n al d ’e rr eu r E v al u at io n d es p ar am èt re s S o rt ie d e sy st èm e
L’estimateur des moindres carrés avec oubli exponentiel est donné par les équations (2.17), (2.18), (2.19), (2.20).
Calcule des paramètres du régulateur STR : , , 4 , Selon l’équation Diophantine (2.17) on obtient :
+ + + 4 + + + = + + + 3.24 On pose : = − ⁄
4 =
2-2/3+ -3(>23?2/3?2-2/,+-+,( 2,(2/,?2, + ,3@ +,3?2,+-+,(23+-3=
+,>2-2/,?23?2/,2,(2, 3(2/3?2,2-@ +,3?2,+-+,(23+-3+
+- 2/,23?2,23?2-2/3(2-23 +,3?2,+-+,(23+-3=
+, 2,23?2/,23(2-2/3?2-2/3?2-23 +,3?2,+-+,(23+-3+
+->232/3?233?2-2/32,(2-232/,@ +,3?2,+-+,(23+-3 = 0 + La loi de commande : ) + 1 = −4 ) + < ) + 1 + < ) − ) + 1 − ) 3.25La figure (3.6) montre les résultats de cet exemple, avec les paramètres suivants : Les valeurs initiales :
1 = 0, 2 = 0, 1 = 0, 2 = 0; BC = D−1.69 0.58 0.12 0.08E Paramètre d’adaptation F = 0.9
Commentaire :
D’après les résultats de simulation dans le cas de placement de pôles adaptatif On
0 5 10 15 20 25 30 35 40 45 50 -0.5 0 0.5 1 1.5 2 temps (s) 0 5 10 15 20 25 30 35 40 45 50 -0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 temps (s) 0 5 10 15 20 25 30 35 40 45 50 -2 -1.5 -1 -0.5 0 0.5 1 temps (s) 0 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 2 2.5 temps (s) ym y uc (a) (b) (d) (c)
Figure 3. 6: Les résultats de Système en temps continu (a) : sortie de système, (b) : signal de commande, (c) : évaluation des paramètres, (d) : signal d’erreur.
Y Ym Uc S o rt ie d e sy st èm e S ig n al d e co m m an d e S ig n al d ’e rr eu r E v al u at io n d es p ar am èt re s
![Figure 1. 3: Structure d’un régulateur flou [11].](https://thumb-eu.123doks.com/thumbv2/123doknet/13807935.441579/18.892.124.795.595.1017/figure-structure-régulateur-flou.webp)
![Figure 1. 6: Structure de la commande adaptative directe [14].](https://thumb-eu.123doks.com/thumbv2/123doknet/13807935.441579/22.892.112.815.112.702/figure-structure-de-la-commande-adaptative-directe.webp)
![Figure 1. 7: Structure de la commande adaptative indirecte [14].](https://thumb-eu.123doks.com/thumbv2/123doknet/13807935.441579/23.892.109.823.323.861/figure-structure-de-la-commande-adaptative-indirecte.webp)