HAL Id: hal-01308135
https://hal.archives-ouvertes.fr/hal-01308135
Submitted on 27 Apr 2016
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
On the computation of viscous terms for incompressible
two-phase flows with Level Set/Ghost Fluid Method
Benjamin Lalanne, Lucia Rueda Villegas, Sébastien Tanguy, Frédéric Risso
To cite this version:
Benjamin Lalanne, Lucia Rueda Villegas, Sébastien Tanguy, Frédéric Risso. On the computation
of viscous terms for incompressible two-phase flows with Level Set/Ghost Fluid Method. Journal
of Computational Physics, Elsevier, 2015, vol. 301, pp.289-307. �10.1016/j.jcp.2015.08.036�.
�hal-01308135�
O
pen
A
rchive
T
OULOUSE
A
rchive
O
uverte (
OATAO
)
OATAO is an open access repository that collects the work of Toulouse researchers and
makes it freely available over the web where possible.
This is an author-deposited version published in :
http://oatao.univ-toulouse.fr/
Eprints ID : 14504
To link to this article : DOI :
10.1016/j.jcp.2015.08.036
URL :
http://dx.doi.org/10.1016/j.jcp.2015.08.036
To cite this version : Lalanne, Benjamin and Rueda Villegas, Lucia
and Tanguy, Sébastien and Risso, Frédéric On the computation of
viscous terms for incompressible two-phase flows with Level Set/Ghost
Fluid Method. (2015) Journal of Computational Physics, vol. 301.
pp.289-307. ISSN 0021-9991
Any correspondance concerning this service should be sent to the repository
administrator:
staff-oatao@listes-diff.inp-toulouse.fr
On
the
computation
of
viscous
terms
for
incompressible
two-phase
flows
with
Level
Set/Ghost
Fluid
Method
Benjamin Lalanne,
Lucia Rueda Villegas,
Sébastien Tanguy
∗
,
Frédéric Risso
InstitutdeMécaniquedesFluidesdeToulouse,UniversitédeToulouseandCNRS,AlléeCamilleSoula,31400Toulouse,Francea
b
s
t
r
a
c
t
Keywords:
LevelSet GhostFluidMethod Two-phaseflows Viscosityjumpcondition
Inthispaper,wepresentadetailedanalysisofthecomputationoftheviscoustermsforthe
simulation ofincompressible two-phaseflows intheframework ofLevelSet/GhostFluid
Method whenviscosity isdiscontinuousacrossthe interface. Twopioneering paperson
thetopic,Kangetal.[10]and Sussmanetal.[26],proposedtwodifferentapproachesto
deal with viscous terms. However, adefinitive assessmentof theirrespective efficiency
iscurrently notavailable. Inthispaper,wedemonstratefromtheoreticalargumentsand
confirm from numerical simulations that these two approaches are equivalent from a
continuous point of view and we compare their accuracies in relevant test-cases. We
alsoproposeanew intermediatemethodwhichusesthepropertiesofthetwoprevious
methods. Thisnew method enables asimple implementation for an implicit temporal
discretizationoftheviscousterms.Inaddition,theefficiencyoftheDeltaFunctionmethod
[24]isalsoassessedandcomparedtothethreepreviousones,whichallowustopropose
ageneraloverviewoftheaccuracyofallavailablemethods.Theselectedtest-casesinvolve
configurationswhereinviscosityplaysamajorroleandforwhicheithertheoreticalresults
orexperimental dataare availableasreference solutions:simulations ofsphericalrising
bubbles,shape-oscillatingbubblesanddeformedrisingbubblesatlowReynoldsnumbers.
1. Introduction
In pioneering works on simulation of incompressible two-phase flows with interface tracking or interface capturing algo-rithms,discontinuitiesofpressurefield,densityfieldorviscosityfieldweretackledbysmoothingthesingulartermsacross theinterfaceonafinitelayerofabout2or3gridcellsthick.Thiskindofapproacheshasbeenproposedintheframework of Front-Tracking algorithms[1,30], for Volume-of-Fluid methods[6,12], and for Level-Set methods[24]. In the literature, they
arereferred toasContinuumSurfaceForcemethods orDeltaFunctionmethods.Such methodsstillprovidesatisfactoryresults inmanysituations.Nevertheless,theysufferfromsomedrawbackssuchasthepresenceofintensespuriouscurrentsathigh capillary-numbers, which can induce strong numerical instabilities. Also, they have to face the tricky problem of describing a surface as a volume of small thickness. A few years ago, a new class of method appeared in the literature, where singular terms across an interface are treatedasjumpconditions, whichprevents frominterface thickening aswell asit reduces spurious currents. Significant contributions to thisnewapproach, well known asSharpInterfacemethod, can be found in
[21] for Front-Tracking methods,in [10,15,26]for Level-Set methods,and [5] Volume-of-Fluid methods.In [26], a Level-Set
method was coupled witha Volume-of-Fluid method,butthe way to impose thejump conditions dependedonly onthe
*
Correspondingauthor.Tel.:+33534322808;fax:+33534322899.E-mailaddress:tanguy@imft.fr(S. Tanguy).
Level-Setfunction–thevolumefractionbeingjustusedtoimproveinterfaceadvectionandtocomputeinterfacecurvature. Most of these papers emphasize on improvements resulting from a sharp description of the surface tension, but they are not conclusive about the effectivenessofSharp Interfacemethods forthe discretizationof viscous terms.However, Kang etal.[10] proposed a newdiscretization oftheviscous terms basedon thegeneral principleof theGhost FluidMethod
[4,15]. The main feature of this new approach consists in computing the contraction of the divergence of the viscous stress
tensorina Laplacianoperatorofthe velocitycomponents
µ
1 E
V ratherthan itsfull expression (withµ
thedynamic vis-cosity and V theE
velocity field). This contraction is only possible for incompressible flow when viscosity is uniform; it ishenceapparentlynotsuitedtocompute theviscoustermsongridcellsthat arecrossedby aninterfacebetweentwo dif-ferentfluids. Tosolvethisissuefortwo-phaseflows,once
µ
1 E
V hasbeencomputed,theauthorsproposetoaddexplicitly the jump of the normal viscous stresses at the interface, resulting from the jump of viscosity, to the pressure jump while solvingthePoissonequation forthepressure.Anotherapproach tocomputethe viscoustermsintheframework ofSharp Interface methods, inspired of a previous work [15], was proposed by Sussman et al. [26]. In a similar way of what it isusuallydoneinContinuumSurfaceForce methods,thefullexpressionofthedivergenceoftheviscousstresstensor
∇.(
2µD)
isdiscretized,theviscousstresstensorbeingdefinedby2µD foraNewtonianfluid,withD therate-of-deformationtensor. In this approach, contrary to previous work [10], it seems that the contribution of the normal viscous stresses has not to be
addedexplicitlytothepressurejumpconditionattheinterface.Valuablenumericalvalidationsofthismethodareproposed in [26]. However, whether these two approaches are formally equivalent or not remained an open question. In particular,
thefactthat jumpofthenormalviscous stresseshastobeexplicitlyaddedto thepressurejumpin[10] andnot in[26]
still required to be justified.
In this paper, we focus on the computation of viscous terms for incompressible two-phase flows using Level-Set methods.
IntheframeworkofSharp-Interface methods,weshalldemonstratethatthetwoapproachesintroducedin[10] and[26]
are equivalent from a theoretical point of view, even if their numerical implementation is quite different.
Fromthisoriginaldemonstration,anewintermediatemethodisproposed,whichallowstomakemoreeasilytheimplicit temporal discretization of the viscous terms as the two methods proposed in [10]and [26].
To complete this survey of numerical methods, we also discuss the consistency of these three Sharp-Interface methods
withtheDelta-Function methodthatisbasedonaContinuumSurfaceForce approach.
Section 2describes the formalism of this set of four methods and proves their equivalence. Then, Section 3 proposes
three numerical benchmarks that are particularly relevant to assess the reliability of these methods and compare their accuracy: spherical rising bubbles, damped shape oscillations of a bubble, and deformed rising bubbles at low Reynolds number.
2. Equations&numericalmethods
2.1. Equationofmotionfortwo-phaseflows,jumpconditionandsingularsourceterm
Let us consider the Navier–Stokes equations for a single-phase incompressible flow; the following two equations express respectivelymomentumandmassconservation:
ρ
DVE
Dt
= −∇
p+ ∇ · (
2µ
D) +
ρ
E
g,
(1)∇ · E
V=
0,
(2)whereV is
E
thevelocityfield, DtD istheLagrangianderivative,ρ
isthefluiddensity,µ
isthefluidviscosity,p isthepressure field,E
g isthe gravity acceleration, and
D isthe rate-of-deformation tensor defined as:
D
=
∇ E
V+ ∇ E
VT
2
.
(3)For incompressible flows with constant viscosity, it can be easily shown that:
∇ · (
2µ
D) =
µ
1 E
V,
(4)which leads to the following simplified expression for Navier–Stokes equation:
ρ
DVE
Dt
= −∇
p+
µ
1 E
V+
ρ
E
g.
(5)Letusnowconsideranincompressibletwo-phaseflow,thewhole-domain-formulation[1,23]leadstothefollowing expres-sion that includes the capillary forces:
ρ
DVE
Dt
= −∇
p+ ∇ · (
2µ
D) +
σ κ
nE
δ
Γ+
ρ
E
g,
(6)where
σ
isthesurfacetension,κ
istheinterfacecurvature,n isE
thenormalvectorattheinterfaceandδΓ
isa multidimen-sionalDiracdistributionlocalized attheinterface. Ifnophase changeoccurs, eq.(2)stays valid. Asdensityandviscosity can vary the across interface, they can be defined as:ρ
=
ρ
gas+ (
ρ
liq−
ρ
gas)
HΓ=
ρ
gas+ [
ρ
]
ΓHΓ,
(7)µ
=
µ
gas+ (
µ
liq−
µ
gas)
HΓ=
µ
gas+ [
µ
]
ΓHΓ,
(8)where HΓ is aHeaviside distribution,equalto 1intheliquidphase andequalto0 inthegasphase, withthe following
definitions for density and viscosity jump conditions:
[
ρ
]
Γ=
ρ
liq−
ρ
gas,
(9)[
µ
]
Γ=
µ
liq−
µ
gas.
(10)Moreover, considering a divergence-free condition on the velocity field, the following unsteady advection equation for the densityfieldisobtainedfrommassconservation:
D
ρ
Dt
=
0.
(11)From that equation, we candeducethe usual propagationequation forinterface motionthat canbe used withLevel Set methods:
D
φ
Dt
=
0,
(12)where
φ
isasigneddistancefunctionfromtheinterface.NotethatanothersimilarequationcanbederivedforVolumeOf Fluidmethods:DF
Dt
=
0,
(13)where F is
the local volume fraction of the considered phase in a computational cell.
Thebalanceofnormalstressesattheinterfaceinvolvesajumpofpressureandajumpofnormalviscousstresses:
[
p]
Γ=
σ κ
+
2[
µ
]
Γ∂
Vn∂
n.
(14)Letusremarknowthattheviscous-stresstensorcanbesplitintotwoparts:
∇ · (
2µ
D) =
µ
∇ · (
2D) +
2D· ∇
µ
.
(15)Ifviscosityisapiecewiseconstant,byusingthedefinitionoftheHeavisidederivative,itcanbeshownthat:
∇
µ
= [
µ
]
ΓE
nδ
Γ.
(16)Finally,weobservethattheprevioussplitting(15)isadecompositionoftheglobalviscousterminacontinuouspartanda singularpart(zeroeverywhereexceptattheinterface):
∇ · (
2µ
D) =
µ
1 E
V+
2[
µ
]
ΓD· E
nδ
Γ (17)This highlights that the contribution of the viscous terms on the pressure jump is already included in the left-hand side ofeq. (17).Thus, wecan supposethat computingthedivergenceoftheoverallviscous stress tensorallowsincludingthe contributionofviscous effectsinthepressurejump.Amore rigorousproof ofthatassertion isprovidedinSection 2.4of this paper.
Tosummarize,themomentumequationcan bedefinedinawhole-domainformulation leadingtoeq.(6)withadensity and a viscosity field defined respectively by eqs. (7) and(8), or in a jump-conditionformulation leading to eq. (5) with additional jump conditions(9), (10), (14).
2.2. Aboutthelinkbetweenjumpconditionsandsingularsourceterms
Letusconsideravolume
Ω
,boundedbyasurfaceΣ
,anddefinedasΩ
1UΩ
2,wherethetwosubdomainsΩ
1 andΩ
2areseparatedbyaclosedsurface
Γ
withΓ ∩ Σ = ∅
,asillustratedinFig. 1.WedefinenE
1 andnE
2 asthenormalvectorsatthe surface
Γ
pointing respectively towardsΩ
1andΩ
2.Let us now consider a piecewise continuous function
ψ
which respects the Poisson equation,1ψ =
0 (18)inside both subdomains
Ω
1 andΩ
2, with the following jump condition at the interface:[ψ]
Γ=
a(E
xΓ),
(19)where a
(E
xΓ)
is a function of the interface coordinateE
xΓ. The jump condition(19)involves that the following surface integralFig. 1.Sketch of a two-phase flow domainΩ1UΩ2with an immersed interfaceΓ.
¨
Γ
¡[ψ]
Γ−
a(E
xΓ)¢E
n2dS= E
0 (20)Considering a homogeneous Dirichlet boundary condition on the external boundary
Σ
of the computational field, it can beeasilydemonstratedthat
¨
Σ
ψ E
nΣdS=
0,
(21)wheren
E
Σ isthenormalvectorpointingoutwardstheexternalboundaryΣ
.Thus¨
Σψ E
nΣdS+
¨
Γ¡[ψ]
Γ−
a(E
xΓ)¢E
n2dS=
0.
(22)Moreover,byremarkingthat
¨
Γ¡[ψ]
Γ−
a(E
xΓ)¢E
n2dS=
¨
Γψ E
n2dS+
¨
Γψ E
n1dS−
¨
Γ a(E
xΓ)E
n2dS (23)we obtain the following equality:
¨
Σψ E
nΣdS+
¨
Γψ E
n2dS+
¨
Γψ E
n1dS=
¨
Γ a(E
xΓ)E
n2dS.
(24)Eq.(24)can also be written as
˚
Ω1∇ψ
dΩ +
˚
Ω2∇ψ
dΩ =
˚
Ω∇ψ
dΩ =
˚
Ω a(E
xΓ)E
n2δ
ΓdΩ,
(25)which leads to the following local formulation:
∇ψ =
a(E
xΓ)E
n2δ
Γ.
(26)Finally,afterdifferentiation,weobtain:
1ψ = ∇ ·
¡
a(E
xΓ)E
n2δ
Γ¢.
(27)Wehavethereforeshownthataddingthefollowingsourceterm
∇ · (
a(E
xΓ)E
n2δΓ
)
totheright-handsideofaPoissonequationimposes a jump condition
[ψ]
Γ=
a(E
xΓ)
on its solutionψ
. This is also valid for a Poisson equation like eq. (18) with aright-hand side different from zero.
Moreover,followingasimilarapproach,itcanalsobedemonstratedthat ascalarfieldthatissolutionofthefollowing equation
1ψ =
b(E
xΓ)δ
Γ,
(28)withb
(E
xΓ)
anotherfunctiondependingoninterfacecoordinate,willalsofulfillsthefollowingjumpcondition:[E
n2· ∇ψ] =
b(E
xΓ).
(29)2.3. Projectionmethodfor whole-domainformulationand jump-conditionformulation
Let us consider now a first-order explicit projection method for the single-phase incompressible Navier–Stokes equation. Itconsistsinprescribingafirstintermediate velocityfieldwhichdoesnotrespectthedivergence-freecondition(predictor step):
E
V1∗
= E
Vn− 1
t¡¡
E
Vn
· ∇
¢
E
Vn
−
υ
1 E
Vn− E
g¢,
(30)with
υ
thekinematicviscosity.Next,aPoissonequationmustbesolvedtodeterminethepressurefield:
1
pn+1=
ρ
n+1∇ · E
V∗
1
t.
(31)Then, in a last step, the final divergence-free velocity field can be computed using the pressure field determined at the previous step:
E
Vn+1
= E
V∗− 1
t∇
pn+1
ρ
n+1.
(32)Applying the projection method toan incompressible two-phase flow isless straightforward. Dependingon whether the
whole-domainformulation orthejump-conditionformulation isused,theintermediatevelocityinthefirststepofthe projec-tion method has to be different.
Let us first consider a whole-domainformulation. An explicit temporal discretization of the capillary and viscous terms
leadsquitenaturallytothefollowingpredictorstep
E
V2∗= E
Vn− 1
tµ
¡
E
Vn· ∇
¢
E
Vn−
∇ · (
2µ
D n)
ρ
n+1−
σ κ
nE
δ
Γρ
n+1− E
g¶
,
(33)withthecorrespondingPoissonequation
∇ ·
µ
∇
pn+1ρ
n+1¶
=
∇ · E
V ∗ 21
t= ∇ ·
µ
E
Vn− 1
tµ
¡
E
Vn· ∇
¢
E
Vn−
∇ · (
2µ
D n)
ρ
n+1−
σ κ
E
nδ
Γρ
n+1− E
g¶¶
.
(34)Next,thecorrectionstepgives:
E
Vn+1
= E
V2∗− 1
t∇
pn+1
ρ
n+1.
(35)Letusnowconsidertheapplicationoftheprojectionmethodtoajump-condition formulation oftheNavier–Stokesequation. We have to solve eq.(5), so the first step of the projection method is similar to eq.(30)for a single-phase flow. As we want
toimpose theappropriatejumpconditionattheinterfaceonthepressurefield (eq.(14)),we canshow,usingtheresults presentedinSection2.2,thatitcanbedone bysolvingthefollowingPoissonequation forthepressurewitharight-hand side split into a continuous part and a singular part:
∇ ·
µ
∇
pn+1ρ
n+1¶
=
∇ · E
V ∗ 11
t+ ∇ ·
µ (
σ κ
+
2[
µ
]
Γ∂∂Vnn)E
nδ
Γρ
n+1¶
.
(36)Using the splitting of the viscous term given ineq. (17)and notingthat n
E
·
D· E
n=
∂Vn∂n , we find the following relation
between V
E
∗ 2 and VE
1∗:E
V2∗= E
V1∗+ 1
t(
σ κ
+
2[
µ
]
Γ ∂Vn ∂n)E
nδ
Γρ
n+1.
(37)The use of eq.(37)allows demonstrating that eq.(34)and eq.(36)are formally identical:
∇ ·
µ
∇
pn+1ρ
n+1¶
=
∇ · E
V ∗ 21
t=
∇ · E
V1∗1
t+ ∇ ·
µ (
σ κ
+
2[
µ
]
Γ∂∂Vnn)E
nδ
Γρ
n+1¶
.
(38)Then,by consideringeq.(37),we candeducethefollowingcorrectionstepforajump-conditionformulation,leading tothe same field V
E
n+1 than in eq.(35):E
Vn+1= E
V1∗−
1
tρ
n+1µ
∇
pn+1−
µ
σ κ
+
2[
µ
]
Γ∂
Vn∂
n¶
E
nδ
Γ¶
.
(39)To summarize,we have shownthatboth a whole-domainformulation and a jump-conditionformulation canbe used when applying a projection method to an incompressible two-phase flow. These two methods are formally equivalent, but they
leadtoadifferentdefinitionofthepredictedvelocityfield inthefirststepoftheprojectionmethod.In[10],the interme-diate velocity field V
E
∗1 is used, whereas in [1,3,6,24] it is the intermediate velocity field V
E
2∗. These two methods will berespectively named in the rest of this paper the Ghost-FluidPrimitiveviscousMethod (GFPM)
and the
Delta-FunctionMethod(DFM).
2.4.Projectionmethodforintermediateformulations
Other definitionsofthepredictedvelocityfieldarepossible.Forexample,weproposethefollowingtwo definitions,the respective interests of which will be discussed later:
E
V3∗= E
Vn− 1
tµ
¡
E
Vn· ∇
¢
E
Vn−
∇ · (
2µ
D n)
ρ
n+1− E
g¶
,
(40)E
V4∗= E
Vn− 1
tµ
¡
E
Vn· ∇
¢
E
Vn−
∇ · (
µ
∇ E
V n)
ρ
n+1− E
g¶
.
(41)In the same way as in the previous section, they lead to the definition of these two Poisson equations, formally equivalent to eq.(34)and eq.(36):
∇ ·
µ
∇
pn+1ρ
n+1¶
=
∇ · E
V ∗ 31
t+ ∇ ·
µ
σ κ
nE
δ
Γρ
n+1¶
,
(42)∇ ·
µ
∇
pn+1ρ
n+1¶
=
∇ · E
V ∗ 41
t+ ∇ ·
µ (
σ κ
+ [
µ
]
Γ∂∂Vnn)E
nδ
Γρ
n+1¶
.
(43)Thefollowingrelationshavebeenusedtodetermineeq.(43):
∇ · (
2µ
D) = ∇ ·
¡
µ
¡∇ E
V+ ∇
TVE
¢¢ = ∇ · (
µ
∇ E
V) +
µ
∇ · ∇
TVE
+ ∇
µ
· ∇
TVE
,
(44)∇ · (
2µ
D) = ∇ · (
µ
∇ E
V) + [
µ
]
Γ∇
TVE
.E
nδ
Γ,
(45)since
∇.∇
TVE
=
0 for an incompressible flow, andE
n
.∇
TVE
.E
n=
∂
Vn∂
n.
(46)Then,thetwofinalcorrectorsteps,respectivelysuitablewitheq.(40)andeq.(41),are:
E
Vn+1= E
V3∗−
1
tρ
n+1¡∇
p n+1−
σ κ
nE
δ
Γ¢,
(47)E
Vn+1= E
V4∗−
1
tρ
n+1µ
∇
pn+1−
µ
σ κ
+ [
µ
]
Γ∂
Vn∂
n¶
E
nδ
Γ¶
.
(48)The intermediate velocity field V
E
3∗ hasalready been used inRefs. [5,21,26]in the framework of SharpInterfacemethods.In the rest of this paper, the Ghost-FluidConservativeviscousMethod (GFCM)
will
refer to the numerical method proposedin [26]. Finally, the use of V
E
4∗ leads to an original numerical method to deal with the viscous terms, that we name the Ghost-FluidSemi-ConservativeviscousMethod (GFSCM).The four methods DFM, GFPM, GFCM and GFSCM described above are therefore theoretically equivalent, but they lead to different numerical approximations. The next objective of this paper is to discuss about their respective interests and numericalaccuracy.
2.5.Spatialdiscretizationofsurfacetension
When a whole-domainformulation [3,6,12,24,30] is used, the surface-tension singular term isaccounted for when V
E
2∗is computed. The intermediate velocity field is next differentiated to compute the right-hand side of the pressure Poisson equation.Therefore,itiswellsuitedtoasmoothdiscretizationofthesurface-tensiontermthatinvolvesafictitiousinterface thickness. Its application to a sharp-interface description would be trickier. This approach is that of the Delta-Function Method,
known as
ContinuumSurfaceForce method.In this framework, the numerical discretization of
discontinuous termsmakesuseofthefollowingregularizedsmoothedHeavisidefunctiondefinedfromtheLevel-Setfunction
φ
:Hε
(φ) =
0 ifφ < −
ε
1 2¡
1+
φε+
sin( πφ ε ) π¢
if|φ| ≤
ε
1 ifφ > +
ε
,
(49)where
ε
is the fictitious interface thickness, which is equal to 2 or 3 cell sizes. The surface-tension termcan then be computed using the following approximation:σ κ
nE
δ
Γ∼
=
σ κ
∇
Hε.
(50) At the opposite, a projection method using a jump-conditionformulation with VE
1∗ as intermediate velocity field is well suitedforSharp-Interfacemethods.Thankstothisformulation, artificialsmoothingofinterfacesingularitiescanbe avoided, allowing a sharp-interface description. It has been used in the framework of Ghost-FluidMethod in [15], where authorspropose afirst-orderdiscretization toimposea jumpconditiontothe solutionaswellastothe normalderivativeof the solution when solving the Poisson equation
∇ · (β∇
u) =
f,
(51)i.e. with the following interface jump conditions
[
u] =
a(E
xΓ)
and·
β
∂
u∂
n¸
=
b(E
xΓ).
Considering that capillary effects can be computed as a jump condition on pressure, an original Sharp-Interfacemethod for
solving the Navier–Stokesequation inthe framework ofLevel-Setmethods was introduced in[10].This methodhas been widely used to perform direct numericalsimulations oftwo-phase flows [16,26–29]. Letus now briefly summarize this approach.
Thediscretizationofa2DPoissonequationaseq.(51),whichinvolvesadiscontinuityofthesolutionandofitsnormal derivative at the interface, writes:
β
i+1/2 j(
ui+1 j−ui j 1x) − β
i−1/2 j(
ui j−ui−1 j 1x)
1
x+
β
i j+1/2(
ui j+1 −ui j 1y) − β
i j−1 2(
ui j−ui j−1 1y)
1
y=
fi j+
gi j+
hi j,
(52)where interpolations of the diffusion coefficient
β
on the cell borders are computed as the harmonic average of its valueβ
+ intheregion wherethe LevelSet functionis positiveandits valueβ
− in theregion wheretheLevel Setfunction is negative; for example, if the interface crosses a mesh segment between xi and xi+1:β
i+1/2 j=
β
+β
−β
+θ + β
−(
1− θ)
,
(53) withθ =
|φ
i+1 j|
|φ
i+1 j| + |φ
i j|
.
(54)Thesourceterms gi j andhi j intheright-handsideofeq.(52)matchwiththediscontinuitiesofu andof
β
∂∂un;theycanbecomputed as
gi j
=
gi jR+
gi jL+
gi jT+
gBi j,
(55)hi j
=
hi jR+
hLi j+
hTi j+
hi jB,
(56)whereeachofthesetermsarenon-zerowhenan interfacecrossesthecorrespondinggridsegment,andsuperscripts R,L, T ,B denoterespectivelyright,left,topandbottomsides.Theirexpressionsare:
gi jR
= ±
β
i+1/2 jaΓ1
x2 g L i j= ±
β
i−1/2 jaΓ1
x2 g T i j= ±
β
i j+1/2aΓ1
y2 g B i j= ±
β
i j+1/2 jaΓ1
y2,
(57) hRi j= ±
β
i+1 2jbΓθ
β
±1
x h L i j= ∓
β
i−1 2jbΓθ
β
±1
x h T i j= ±
β
i j+1 2bΓθ
β
±1
y h B i j= ∓
β
i j−1 2bΓθ
β
±1
y.
(58)It is noteworthy that an analogy can be established by using the results demonstrated in Section 2.2and the discretization
described in thissection. Forsake ofsimplicity,let ustake a diffusioncoefficient
β
equal tounity. InSection 2.2,it has beenshownthatsolving1
u=
f with[
u] =
a(E
xΓ)
and· ∂
u∂
n¸
=
b(E
xΓ)
is equivalent to solve1
u=
f+ ∇.
¡
a(E
xΓ)E
nδ
Γ¢ +
b(E
xΓ)δ
Γ.
Comparingthisexpressionwithdiscreteequation(52),wededucethatsourceterms gi j andhi j,thatappearinthe
frame-work of the Ghost-FluidMethod,
are respectively numerical approximations of
∇.(
a(E
xΓ)E
nδΓ
)|
i j and b(E
xΓ)δΓ
|
i j:∇ · (
anE
δ)|
i j=
gi j+
O(1
x)
(59)b
δ|
i j=
hi j+
O(1
x)
(60)Such ananalogyestablishesthelinkbetweentheContinuumSurfaceForce approachbasedonnumericalapproximationsof
2.6.Spatialdiscretizationofviscousterms
More details are provided in this section about the spatial discretization of viscous terms for the different methods described in the previous sections. In the following, for sake of simplicity, all developments are presented in 2D with Cartesian coordinates and a uniform grid. The generalization to axisymmetric coordinates or 3D geometry is straightforward.
2.6.1. Conservativeviscousformulation
Ifaconservativeviscousformulation
∇.(
2µD)
isconsidered,asitisthecaseintheGFCMorintheDFM,theprojection of the divergence of the viscous-stress tensor leads to the following relations:∇ · (
2µ
D)|
x=
∂
∂
xµ
2µ
∂
u∂
x¶
+
∂
∂
yµ
µ
µ ∂
u∂
y+
∂
v∂
x¶¶
(61)∇ · (
2µ
D)|
y=
∂
∂
xµ
µ
µ ∂
u∂
y+
∂
v∂
x¶¶
+
∂
∂
yµ
2µ
µ ∂
v∂
y¶¶
(62)Letus remark that these two relations depend on both velocity components. This is whya fullyimplicit temporal dis-cretizationofviscoustermsismorecomplexwhenthisformulationisused.Suitableapproximationsofeq.(61)leadtothe following spatial discretizations, Dx and Dy denoting the differential operators:
¡∇ · (
2µ
D)¢ · E
ex|
i+1/2 j=
∼
Dx(
2µ
Dxu)|
i+1/2 j+
Dy(
µ
Dyu)|
i+1/2 j+
Dy(
µ
Dxv)|
i+1/2 j (63) Dx(
2µ
Dxu)|
i+1/2 j=
2µ
i+1 j(
ui+3/2 j −ui+1/2 j 1x) −
2µ
i j(
ui+1/2 j−ui−1/2 j 1x)
1
x (64) Dy(
µ
Dyu)|
i+1/2 j=
µ
i+1/2 j+1/2(
ui+1/2 j+1 −ui+1/2 j 1y) −
µ
i+1/2 j−1/2(
ui+1/2 j −ui+1/2 j−1 1y)
1
y (65) Dy(
µ
Dxv)|
i+1/2 j=
µ
i+1/2 j+1/2(
vi+1 j+1/2 −vi j+1/2 1x) −
µ
i+1/2 j−1/2(
vi+1 j−1/2 −vi j−1/2 1x)
1
y (66)Thefollowingspatialdiscretizationforeq.(62)is
¡∇ · (
2µ
D)¢ · E
ey|
i j+1/2=
∼
Dx(
µ
Dyu)|
i j+1/2+
Dx(
µ
Dxv)|
i j+1/2+
Dy(
2µ
Dyv)|
i j+1/2 (67) Dx(
µ
Dyu)|
i j+1/2=
µ
i+1/2 j+1/2(
ui+1/2 j+1 −ui+1/2 j 1y) −
µ
i−1/2 j+1/2(
ui−1/2 j+1 −ui−1/2 j 1y)
1
x (68) Dx(
µ
Dxv)|
i j+1/2=
µ
i+1/2 j+1/2(
vi+1 j+1/2 −vi j+1/2 1x) −
µ
i−1/2 j+1/2(
vi j+1/2 −vi−1 j+1/2 1x)
1
x (69) Dy(
2µ
Dyv)|
i j+1/2=
2µ
i j+1(
vi j+3/2 −vi j+1/2 1y) −
2µ
i j(
vi j+1/2−vi j−1/2 1y)
1
y (70)This spatial discretization for the conservative viscous approach can be used both in the framework of Smoothed-Interface methods (e.g.intheDFM)[3,24]orSharp-Interfacemethods (e.g.intheGFCM) [26].Thedifferenceliesinthewayviscosity isapproximatedontheborderofacellthatiscrossedbyaninterface.
In the DFM, eq.(8)is used with the approximation of the Heaviside function given by eq.(49).
Inthe GFCMproposed by Sussmanetal.[26], theinterpolation usedto computeviscosity onthe cellborderis quite similar to that proposed by Liu et al.[15] to interpolate the diffusion coefficient of a Poisson equation (given here by eq.(53)). Thereafter, this kind of interpolation will be used for all the computations that involve the Ghost-FluidMethod (i.e.
GFCM, GFPM and GFSCM).
2.6.2. Ghost-FluidPrimitiveviscousMethod
The GFPM of Kang et al.[10] is now briefly described. When this approach is used, the jump condition on the normal
viscousstressesisaddedtothecapillaryforceswhensolvingthePoissonequationforpressureasshownineq.(36). ThisapproachfortheviscoustermcanbesummarizedbyconsideringthefollowingprojectionsfortheLaplacianofthe velocity:
µ
1 E
V|
x=
µ
µ ∂
2u∂
x2+
∂
2u∂
y2¶
,
(71)µ
1 E
V|
y=
µ
µ ∂
2v∂
x2+
∂
2v∂
y2¶
.
(72)(
µ
1 E
V) · E
ex|
i+1/2 j∼
=
µ
¡
D2xu|
i+1/2 j+
D2yu|
i+1/2 j¢,
(73)(
µ
1 E
V) · E
ey|
i j+1 2∼
=
µ
¡
D2xv|
i j+1 2+
D 2 yv|
i j+1 2¢.
(74)In[10],remarkingthatthevelocitygradientsarestronglydiscontinuousattheinterfacebecauseofviscosityjumps,itwas proposed to compute each component of the Laplacian of the velocity µ
1 E
V (eqs.(73)and (74)) by computing the differentterms of the vector
∇.(
µ
∇ E
V)
and subtracting their jump at the interface; on the x-axis,µ
D2xu|
i+1/2 j=
Dx(
µ
Dxu)|
i+1/2 j− [
µ
Dxu]δ
Γ|
i+1/2 j,
(75)µ
D2yu|
i+1/2 j=
Dy(
µ
Dyu)|
i+1/2 j− [
µ
Dyu]δ
Γ|
i+1/2 j,
(76)and on the y-axis,
µ
D2xv|
i j+1/2=
Dx(
µ
Dxv)|
i j+1/2− [
µ
Dxv]δ
Γ|
i j+1/2,
(77)µ
D2yv|
i j+1/2=
Dy(
µ
Dyv)|
i j+1/2− [
µ
Dyv]δ
Γ|
i j+1/2.
(78)The appropriate jump conditions for eqs.(75), (76), (77)and (78)are given in the following matrix by:
µ
[
µ
∂u ∂x] [
µ
∂u ∂y]
[
µ
∂v ∂x] [
µ
∂v ∂y]
¶
= [
µ
]∇ E
Vµ
E
0E
t¶
Tµ
E
0E
t¶
+ [
µ
]E
nTE
n∇ E
VnE
TnE
− [
µ
]
µ
E
0E
t¶
Tµ
E
0E
t¶
∇ E
VE
nTnE
,
(79)where
E
t istheunitvectortangenttotheinterface.To compute accurately eqs.(75), (76), (77), (78)in the framework of the Ghost-FluidMethod[10], suitable sharp
approxi-mations, eq.(58), of the Dirac distribution are required.
Note that thejump conditionsineq. (79)are onlyvalid foracontinuous velocityfield betweenthe two phases:this approachcannotbeusedwhenphasechangesormasstransfersoccur.
2.6.3. GhostFluidSemi-ConservativeviscousMethod
IntheGFSCM,updatingV
E
4∗ requirescomputingthefollowingviscousterms:∇ · (
µ
∇ E
V)|
x=
∂
∂
xµ
µ
∂
u∂
x¶
+
∂
∂
yµ
µ
∂
u∂
y¶
,
(80)∇ · (
µ
∇ E
V)|
y=
∂
∂
xµ
µ
∂
v∂
x¶
+
∂
∂
yµ
µ
∂
v∂
y¶
.
(81)Thatcanbedone inasimilarway asfortheconservativeviscous approach,exceptforthesecond-ordercross-derivatives, which are non-zeroonly atthe interface andare therefore includedin thepressure jump whenthe Poissonequation is solved.As pointedout previously,thisapproachcanbeusedwithanimplicittemporaldiscretizationoftheviscousterms and also when a phase change occurs.
2.7. Implicittemporaldiscretizationofviscousterms
Further elements are provided now to deal with an implicit temporal discretization of viscous terms.
When theincompressibleNavier–Stokesequationsforasingle-phasefloware considered,theprojection methodleads tothefollowingsemi-implicitalgorithmforthepredictorstep
E
V1∗
− 1
tυ
1 E
V1∗= E
Vn− 1
t¡
E
Vn
· ∇
¢
E
Vn
,
(82)which requires solving an independent linear system for each velocity component.
When a two-phase flow with a discontinuous viscosity is considered, the use of a semi-implicit projection method to solvetheincompressibleNavier–Stokesequationsismorecomplex.Indeed,in2D,thefollowingtwo coupledequationsmust besolvedsimultaneously,leadingtoamorecomplicatedlinearsystemasitiscarriedoutin[25,26]:
ρ
ni++11/2 ju∗i+1/2 j− 1
t¡
Dx¡
2µ
Dxu∗¢ +
Dy¡
µ
Dyu∗¢ +
Dy¡
µ
Dxv∗¢¢¯
¯
i+1/2 j=
ρ
in++11/2 j¡
uni+1/2 j− 1
t¡
E
Vn· ∇
¢
un|
i+1/2 j¢,
(83)ρ
ni j++11/2v∗i j+1/2− 1
t¡
Dx¡
µ
Dyu∗¢ +
Dx¡
µ
Dxv∗¢ +
Dy¡
2µ
Dyv∗¢¢¯
¯
i j+1/2=
ρ
i jn++11/2¡
vni j+1/2− 1
t¡
E
Vn· ∇
¢
vn|
i j+1/2¢.
(84)ρ
in++11/2 ju∗i+1/2 j− 1
t¡
Dx¡
2µ
Dxu∗¢ +
Dy¡
µ
Dyu∗¢¢¯
¯
i+1/2 j=
ρ
ni++11/2 j¡
uni+1/2 j− 1
t¡
E
Vn· ∇
¢
un¯
¯
i+1/2 j¢ + 1
t Dy¡
µ
Dxvn¢¯
¯
i+1/2 j,
(85)ρ
i jn++11/2v∗i j+1/2− 1
t¡
Dx¡
µ
Dxv∗¢ +
Dy¡
2µ
Dyv∗¢¢¯
¯
i j+1/2=
ρ
ni j++11/2¡
vni j+1/2− 1
t¡
E
Vn· ∇
¢
vn¯
¯
i j+1/2¢ + 1
t Dx¡
µ
Dyun¢¯
¯
i j+1/2.
(86)Nevertheless,itisdoubtfulthatthenumericalschemecomposedofeqs.(85),(86)reallyalleviatesthetimestepconstraint imposedbyviscositysincethelasttermsontherightistreatedexplicitly.
Another way to carry out an implicit treatment of the viscous terms for incompressible flows is proposed in [11]. This
is based on an approximate factorization which requires solving tridiagonal matrices rather than inversion of a large sparse matrix.Thisalternativemethodhasnotbeentestedinthiswork.
At the opposite, as it has been previously shown, for incompressible flows the second-order cross-derivatives are perfectly compensated everywhere except at the interface where viscosity is discontinuous. Therefore, the GFSCM can be used with benefitswithanimplicittreatmentoftheviscousterms,whichleadstothefollowingdiscretization:
ρ
in++11/2 ju∗i+1/2 j− 1
t¡
Dx¡
µ
Dxu∗¢ +
Dy¡
µ
Dyu∗¢¢¯
¯
i+1/2 j=
ρ
ni++11/2 j¡
uni+1/2 j− 1
t¡
E
Vn· ∇
¢
un|
i+1/2 j¢,
(87)ρ
i jn++11/2v∗i j+1/2− 1
t¡
Dx¡
µ
Dxv∗¢ +
Dy¡
µ
Dyv∗¢¢¯
¯
i j+1/2=
ρ
ni j++11/2¡
vni j+1/2− 1
t¡
E
Vn· ∇
¢
vn|
i j+1/2¢.
(88)The resulting linear systems can be solved as easily as in the single-phase case: the matrices of discretization are symmetric, definite and positive, which allows the use of an efficient and simple black-box solver. Note that an implicit temporal discretizationoftheviscoustermscanalsobeusedwiththeGFPM[8].
Weconcludebysomecommentsonthewaytodefinethedensity:
ρ
ni++11/2 j andρ
i jn++11/2.Thedefinitionmustbe compat-ible with the computation of the correction step, which itself relies on the manner density is computed when the Poisson equation on pressure is solved. Accurate resultsare obtainedby using the following generalexpression forρ
ni++11/2 j andρ
ni j++11/2 in the grid cells that are crossed by an interface:1
ρ
n+1=
1 ρ+ρ− 1 ρ+θ +
ρ1−(
1− θ)
=
1ρ
−θ +
ρ
+(
1− θ)
.
(89)2.8.Summaryaboutthefourdifferentmethodstodealwithviscosity
Table 1gives an overview of the characteristics of the four different methods to deal with viscous terms in the
simula-tions of two-phase flows with Level-Setmethods,
and describes the main steps for implementing it.
2.9. Level-SetmethodsforinterfacecapturingInterface motion is captured with a Level-Setmethod [20,24], which consists in solving a convection equation for the
Level-Set function
φ
:∂φ
∂
t+ ( E
V· ∇)φ =
0,
(90)withV the
E
velocityattheinterface.Areinitializationstep[24]cannextbeperformedtoinsurethattheφ
functionremains asigneddistanceinthecomputationdomain.ThiscanbedonebysolvingiterativelythespecificPDE:∂
d∂
τ
=
sign(φ)
¡
1
− |∇
d|¢,
(91)where d is
the
reinitialized distance function, τ a fictitious reinitialization time and sign(φ
) a smoothed signed functiondefinedin [4,24].At the endof every physicaltime step, two temporal iterations of the redistancing equation (91) are solvedusingasecond-orderTVD–Runge–Kuttascheme.
The signed distance function allows preserving a good accuracy when computing interface geometrical properties as the normalvectororthecurvaturewiththefollowingsimplerelations:
E
n
=
∇φ
|∇φ|
,
(92)Table 1
SummaryoffourdifferentmethodstodealwithviscoustermswithLevel-Setmethods.
Framework Methodandreferencepapers Stepsoftheexplicitprojectionmethodandnumber ofthe correspondingequationsinthereferencepaper
Implementationofan implicitmethod “Wholedomain formulation” Delta-FunctionMethod DFM Sussmanet al.[3,24,25] E V∗ 2= EVn− 1t¡( EVn· ∇) EVn− ∇·(2µDn) ρn+1 −σ κ E nδΓ ρn+1 − Eg ¢
(33) Onecomplexcoupled paraboliclinearsystemfor allthevelocitycomponents ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 2 1t (34) E Vn+1= EV∗ 2− 1t ∇pn+1 ρn+1 (35) “Jumpcondition formulation”
Ghost-FluidPrimitiveviscous Method GFPM Kangetal.[10] Hongetal.[8] E V∗ 1= EV n− 1t¡( EVn· ∇) EVn−µ1 EVn ρn+1 − Eg ¢
(30) Severalsimpleindependent
linearsystemswithexplicit jumpconditionsonthe componentsoftheviscous tensor ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 1 1t + ∇ · ¡(σ κ+2[µ]Γ∂∂Vnn)EnδΓ ρn+1 ¢ (36) ⇔ ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 1 1t [pn+1] Γ=σ κ+2[µ]Γ∂∂Vnn E Vn+1= EV∗ 1− 1t ρn+1¡∇p n+1−¡ σ κ+2[µ]Γ∂∂Vnn¢EnδΓ¢ (39) Ghost-FluidConservative viscousMethod GFCM Sussmanet al.[26] E V∗ 3= EV n− 1t¡( EVn· ∇) EVn−∇·(2µDn) ρn+1 − Eg ¢
(40) Onecomplexcoupled
paraboliclinearsystemfor allthevelocitycomponents ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 3 1t + ∇ · ¡σ κ EnδΓ ρn+1 ¢ (42) ⇔ ( ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 3 1t [pn+1] Γ=σ κ E Vn+1= EV∗ 3− 1 t ρn+1(∇pn+1−σ κnEδΓ) (47) Ghost-Fluid Semi-Conservativeviscous Method GFSCM Presentpaper E V∗4= EVn− 1t¡( EVn· ∇) EVn−∇·(µ∇ EVn) ρn+1 − Eg ¢
(41) Severalsimpleindependent linearsystemswithoutany jumpconditionsonthe componentsoftheviscous tensor ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 4 1t + ∇ · ¡(σ κ+[µ]Γ∂∂Vnn)EnδΓ ρn+1 ¢ (43) ⇔ ∇ ·¡∇pn+1 ρn+1 ¢ = ∇· EV∗ 4 1t [pn+1] Γ=σ κ+ [µ]Γ∂∂Vnn E Vn+1= EV∗ 4−ρ1n+t1¡∇pn+1− ¡ σ κ+ [µ]Γ∂∂Vnn¢EnδΓ¢ (48)
The curvature is firstly computed on all the grid nodes with simple finite difference schemes. Next,if the Ghost Fluid Methodisused,thecurvatureisinterpolatedontheinterface.Forexample,ifitcrossesthesegment
[
xi,
xi+1]
thefollowinginterpolation is used:
κ
I=
κ
i+1θ +
κ
i(
1− θ)
(94)2.10. Temporalandspatialdiscretizations
Allconvective termsandspatial derivativesoftheredistanceequationare discretizedbymeansofa fifth-orderWENO 5scheme[9].First-orderexplicitorsemi-implicittemporalintegrationmethodshavebeendescribed inprevioussections. Theseelementarystepsarefinallyincludedinasecond-orderTVD–Runge–Kutta schemefortheoveralltemporalintegration of the PDE systemin order to improve the computation stability. A classical time-step constraint [10,23,24] accounting for the stability conditions on convection, viscosity (in case of an explicit temporal discretization) and surface tension is imposed.
1
tconv=
1
x maxk E
Vk
(95)1
tvisc=
1 41
x2max
(
υ
liq,
υ
gaz)
(96)
1
tsurf_tens=
1 2s
ρ
liq1
x3σ
(97)Ifan implicittemporaldiscretizationisusedwiththeGFSCM,an explicitpartdependingon theviscosityjumpcondition remains inEqs.(43),(48).Therefore,thecorresponding terminvolvesanothertemporalconstraintwhichisdifferentfrom Eq.(96),since it dependsona viscosity jumpconditioninstead ofa maximumkinematicviscosity value. Byperforming several numerical test-cases with zero surface tension and very low gravity (in order to remove the stability constraints due to surface tension and convection), we have observed that the following time step restriction is sufficient to ensure the numerical stability:
1
tvisc=
ρ
1
x2[
µ
]
(98)with
ρ
theaveragedensityofthetwophases.Whereasthisconstraintdependsalsoon1
x2,itcanbemuchmorelenientthanthe classical one,Eq. (96), because [µρ]
∼
1υliq is muchhigherthan
1
υgas formanytypical gas–liquidsystems suchas
air–waterortheoneusedin Section3.3.Forexample,itisshownin Section3.3thattheimplicitGFSCMallowsperforming thecomputationwithamuchlargertimestepincomparisontoitsexplicitcounterparts.
Finally, the global time step restriction can be computed with the following relation:
1
1
t=
11
tconv+
11
tvisc+
11
tsurf_tens (99) 3. NumericalresultsRelevantbenchmarkshavebeendesignedtoassessandcomparethefourdifferentnumericalmethodsdiscussedinthis paper:DFM,GFPM,GFCMandGFSCM.
In the first benchmark, computations of a spherical bubble rising under gravity are performed for a range of Reynolds number varying from 20 to 100.
The second benchmark consistsof numerical simulations ofbubble shape-oscillations in the absenceof gravity. Such a physicalproblemis characterized by an oscillationReynolds numberwhichcompares the oscillations frequencyto the damping rate. The accuracy of the simulations is evaluated from comparisons with the theoretical prediction of the fre-quency
and the damping rate of the oscillations for Reynolds numbers varying from 20 to 300. In addition, a study of the
spatialconvergenceofthesimulations iscarriedoutinordertodeterminehowmesh-gridrequirementsevolve whenthe Reynolds number is varied.Finally, the third benchmark focuses on the rise of a non-spherical bubble in a very viscous liquid as in Refs.[2,6,26]. Thesethreebenchmarksconsistofaxisymmetriccomputations.
3.1. Asphericalbubblerisingundergravity
Currently,performingwell-resolvedsimulationsofbubblyflowsordropletspraysisachallengeforthedirectnumerical simulationoftwo-phase flows.Manyissuesmustbe overcometoachieve suchambitioustargets.Onecanexpect thatthe development of High Performance Computing hardware and software will allow performing simulations involving a growing numberofbubblesordrops.Howeverwell-resolved3Dsimulationsremaincostlyandaparticularattentionmustbepaidto thedevelopmentandtheassessmentofaccuratenumericalmethodstosolvethefluiddynamicsequations.Inparticular,a computationwhichisefficienttodescribeaccuratelythedynamicswithhalfthenumberofgridcellsonabubblediameter makes possible to compute eight times more bubbles with the same computational resources. Actually, the gain would even besignificantlygreatersince,forexplicitmethods,alargertimestepcanbeused onacoarsergrid.Thetest-caseproposed inthis section allows us to assessthe different discretizations of theviscous terms.Simulations are performedwithan axisymmetric coordinate system. The radial and axial sizes of the computational domain are defined relatively to the bubble radius Rbubble: lr
=
8Rbubbleand lz=
4lr. Considering a spherical bubble, reference results on the drag coefficient are providedbyboundary-fittednumericalsimulationsfrom[19]whenRe∞
≤
50 orbyMoore’stheory[18]forhigherReynoldsnumbers.OurcomputationsareperformedforlowBondnumberstopreservebubblesphericity.Itisworthmentioningthatthecase of a rising spherical bubble is particularly advised to assess the discretization of the viscous terms because, in this situation, thedrag forcemainly dependsonviscousdissipation andnoton pressureeffects,unlike thecaseofastronglydeformed bubble.
The physical properties of liquid and gas are kept identical to water and air for all simulations presented in this section:
ρ
liq=
1000 kg m−3, µliq=
0.
00113 kg m−1s−1, ρgas=
1.
226 kg m−3, µgas=
1.
78×
10−5 kg m−1s−1. Simulation conditionsaresummarizedinTable 2forfiveconfigurationscorrespondingtoRe∞
=
20,40,60foraBondnumberBo=
0.
025,andtoRe∞
=
80,
100 forBo=
0.
0125.Bubbles areinitiallystaticandevolve undergravityuntiltheterminalvelocity isreached.The boundaries of the computational domain are defined as walls (except on symmetry axis) and set sufficiently far from thebubbletohaveanegligibleinfluenceontheresults.
Simulationsareperformedwiththreedifferentmeshgrids(32
×
128,64×
256,128×
512,256×
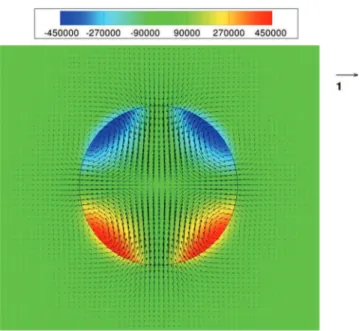
1024),whichdescribe respectively one bubble diameter with 8, 16, 32 or 64 mesh points. Fig. 2shows a snapshot of the interface location and thefully-developed vorticity in the frame moving with the bubble for the case Re∞
=
60 with the thinnest grid. Results of allthesimulationsaresummarizedinTables 3,4,5,6 and7,whichcorrespondrespectivelytocomputationscarriedoutusing theGhostFluidConservativeviscousMethod (GFCM),explicitandimplicitGhost-FluidSemi-ConservativeviscousMethod (GFSCM), Ghost-FluidPrimitiveviscousMethod (GFPM)
and
Delta-FunctionMethod (DFM).Many
conclusions can be drawn from thesetables. First, all methods fail to provide accurate results on the coarsest grid regardless the value of Re∞: this mesh is clearly
insufficienttocaptureaccuratelyviscouseffects.Whentheintermediategridisused,theGFCMandtheexplicitandimplicit GFSCM provides very good results: whatever Re∞, deviations between reference results and numerical simulations are less
Table 2
Bubbleradius,gravityacceleration,surfacetensionandfinaltimeofsimulationforasphericalbubblerisingat variousReynoldsnumbers.
Re∞=20 Re∞=40 Re∞=60 Re∞=80 Re∞=100
Rbubble(µm) 19.55 44.65 70.45 98.95 127.9
gz(m s−2) −9144.4 −1755.2 −705.6 −357.5 −213.9
σ(N m−1) 0.56 0.56 0.56 1.12 1.12
tf (s) 0.0004 0.00135 0.002375 0.0048 0.007
Fig. 2.Streamlines,interfacelocationandvorticityfield(s−1)inthemovingframeofarisingsphericalbubbleatRe
∞=60 (grid128×512)usingthe GFCM.
Table 3
ErrorontheterminalReynoldsnumberofrisingbubblesfordifferentcomputationalgridswiththeexplicitGFCM.
Grids Re∞=20 Re∞=40 Re∞=60 Re∞=80 Re∞=100 32×128 −22.0% −34.0% −38.8% −63.0% −67.4% 64×256 +2.5% +1.8% −1.3% −1.3% −3.0% 128×51 +0.5% +0.8% −1.0% +1.9% +1.9% 256×1024 −0.9% −0.4% −1.95% −1.02% −0.65% Table 4
Error onthe terminalReynoldsnumber ofrisingbubbles for differentcomputationalgridswith the explicit GFSCM. Grids Re∞=20 Re∞=40 Re∞=60 Re∞=80 Re∞=100 32×128 −23.5% −32.5% −39.0% −62.5% −67.0% 64×256 −0.5% +2.5% +1.3% +4.3% +3.0% 128×512 −3.5% +0.6% 0.7% +5.4% +6% 256×1024 −2.15% +3.25% +4.2% +6.75% +8.2% Table 5
Erroron theterminalReynoldsnumberofrisingbubblesfor differentcomputationalgridswith theimplicit GFSCM. Grids Re∞=20 Re∞=40 Re∞=60 Re∞=80 Re∞=100 32×128 −18.6% −25.0% −30.2% −52.9% −55.1% 64×256 −1.2% 1.5% −0.1% 2.0% 0.9% 128×512 −3.7% 0.1% −0.2% 3.2% 3.9% 256×1024 −4.2% 3% 4% 6.25% 7.6%
Table 6
ErrorontheterminalReynoldsnumberofrisingbubblesfordifferentcomputationalgridswiththeexplicitGFPM.
Grids Re∞=20 Re∞=40 Re∞=60 Re∞=80 Re∞=100 32×128 −16.7% −24.6% −31.5% −52.3% −56.8% 64×256 0.5% −1.2% −4.5% −4.8% −6.6% 128×512 0.1% −0.3% −2.6% −1.0% −1.6% 256×1024 −0.7% −0.67 −2.6% −1.3% −1.4% Table 7
ErrorontheterminalReynoldsnumberofrisingbubblesfordifferentcomputationalgridswiththeexplicitDFM.
Grids Re∞=20 Re∞=40 Re∞=60 Re∞=80 Re∞=100
32×128 −39.5% −46.1% −53.8% −75.8% −81.6%
64×256 −16.5% −18.3% −21.7% −29.3% −31.8%
128×512 −7.5% −7.9% −9.9% −10.5% −10.9%
256×1024 −4.3% −4.65% −6.6% −6.04% −6.05%
gridsincethediscrepancybetweennumericalsimulationsandreferencesolutionsisless than7%;theerrorincreaseswith theReynoldsnumber,whichisprobablyduetothedifficultytocalculateaccurately boundarylayersthat becomesthinner at high Re∞. By contrast, the DFM provides a lower accuracy than the other methods with errors on Re∞ which vary from
15%to30%andincreasewithRe∞.Finally,consideringresultsobtainedwiththemostrefinedgrids,itclearlyappearsthat
boththeGFCMandtheGFPMhaveconvergedtothecorrectsolution.TheexplicitandimplicitGFSCMprovideresultswith larger errors than the two previous methods with errors varying between 2% and 8%. The DFM seems to converge slowly towards the theoretical solution and still shows deviations varying from 4% to 6% (according to Re∞) with 64 mesh points
onabubblediameter.
3.2.Shapeoscillationsofabubble
Considering small-amplitude-shape-oscillations of a bubble in the absence of gravity, theoretical solutions of the lin-earizedNavier–Stokesequationsforanincompressibleflowexistandgiveexpressions forthe frequencyandthedamping rateof the oscillations [17,22]. We have took advantage of this to design an accurate and stringent test-casefor direct numerical simulations. While the oscillation frequency depends essentially on capillary effects, we have focused on the damping ratein order to test the accuracy of different numerical approachesabout viscosity. Like in the previous sec-tion,simulations are performedwithan axisymmetric coordinateframe. The dimensions ofthe computational field are:
lr
=
4Rbubble, lz=
2lr. Wall boundary conditions are used on all domain borders (except on symmetry axis) and confinementeffects have been checked to be negligible. Densities and viscosities, corresponding to an air/water system, are the same as inSection3.2,andthesurfacetensionis
σ
=
0.
07 N m−1.WeproposeaparametricstudybyvaryingtheReynoldsnumberofoscillation,by Reosc
=
pσRbubbleρliq
µliq ,from20 to300. (Note that theReynoldsnumberof oscillationisthe inverseofthe
Ohnesorgenumber.)
Inoursimulations,theinitialconditioncorrespondstoadeformedinterfacedescribedbyaLegendrepolynomialoforder 2 with the following Level Set function
φ (
r, θ,
t=
0) =
r−
Rbubble£
1
+
ε
P2(
cosθ )¤,
(100)where
(
r,
θ )
are thesphericalcoordinates, P2(
cosθ )
=
21(
3cos2θ −
1)
andǫ
isthedimensionlessinitial amplitudeofthedeformation, chosen low enough (ε
=
0.
075) to maintain the oscillations in the linear regime. The computed shape of theinterface is extracted at each time step and decomposed into spherical harmonics in order to obtain the time evolution of amplitudea2
(
t)
ofharmonicl=
2:r
(θ,
t) =
Rbubble+
a2(
t)
P2(
cosθ ).
(101)Then,thefrequency
ω
2 andthedampingrateβ
2 oftheoscillationsareobtainedfroma2(
t)
sincea2
(
t) =
ε
Rbubblecos(
ω
2t)
e−β2t (102)The values issued from the simulations are compared with the theoretical values ωth
2 and
β
2ththat are computed by solvingnumericallythecharacteristicequation givenby Prosperetti(eq.(33)ofRef.[22]).Thedampingrateisaglobalparameter thatrequiresanaccuratecalculationoftheviscoustermsalloverthecomputationdomain.
Snapshots of the interface location and vorticity are shown in Fig. 3and Fig. 4for Reosc
=
20 and Reosc=
200,respec-tively. It is clear from these figures that the vorticity is localized inside the bubble, whereas the flow remains potential outside.Forashape-oscillatingbubble,boththefrequencyandthedampingratearemainlycontrolledbythepotentialflow in the liquid phase. The asymptotic development of the damping rate given by Miller and Scriven [17] shows that, for a
Fig. 3.Velocity field, interface location and vorticity field (s−1) of an oscillating bubble at Re
osc=20 (grid 256×512) using the GFCM.
Fig. 4.Velocity field (m s−1), interface location and vorticity field (s−1) of an oscillating bubble at Re
osc=200 (grid 256×512) using the GFCM.
Table 8
Erroronthedampingrateβ2foranoscillatingbubblewithdifferentcomputationalgridswiththeexplicitGFCM.
Grids Reosc=20 Reosc=50 Reosc=100 Reosc=200 Reosc=300
64×128 1.49% 1.47% 9.75% 23.16% 41.72%
128×256 −0.20% 0.32% 1.99% 7.30% 13.71%
256×512 −0.31% 0.08% 0.70% 2.55% 5.36%
range of Reosc, i.e. between 20and 300. The restof the viscous dissipation comes fromthe potential flow in the liquid
phase.
For each Reynolds number of oscillation, a test has been computed with four different numerical methods (GFCM, explicit GFSCM, GFPM and DFM) and for three different mesh grids
(
64×
128)
,(
128×
256)
and(
256×
512)
, which describe a bubblediameterwith32,64and128meshpoints,respectively.TheresultsofthesimulationsaresummarizedinTables 8,9,10 and 11, where the deviation of the numerical simulations relative to the theoretical predictions have been reported. The error
![Fig. 1. Sketch of a two-phase flow domain Ω 1 U Ω 2 with an immersed interface Γ . ¨ Γ ¡ [ψ] Γ − a (Ex Γ ) ¢ En 2 dS = E0 (20)](https://thumb-eu.123doks.com/thumbv2/123doknet/14434796.515795/6.892.332.564.151.334/fig-sketch-phase-flow-domain-ω-immersed-interface.webp)