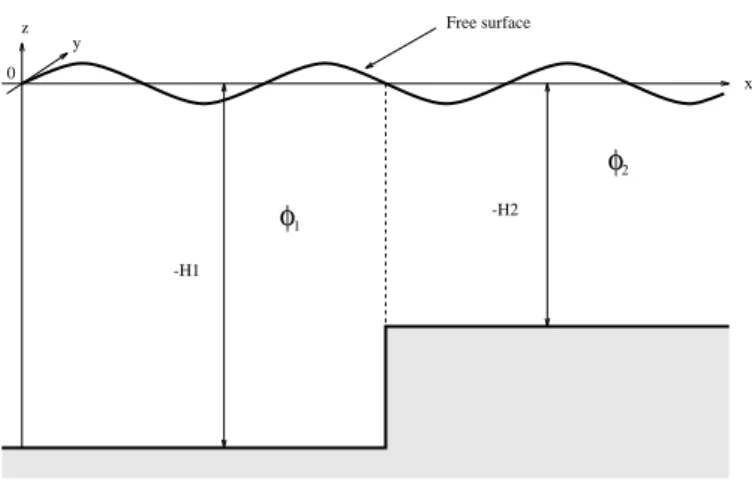
Topographical scattering of waves: a spectral approach
25
0
0
Texte intégral
Figure
+7



Documents relatifs