HAL Id: cea-01810011
https://hal-cea.archives-ouvertes.fr/cea-01810011
Submitted on 7 Jun 2018
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Automatic optimisation of system architectures using
EAST-ADL
Martin Walker, Mark-Oliver Reiser, Sara Tucci-Piergiovanni, Yiannis
Papadopoulos, Henrik Lönn, Chokri Mraidha, David Parker, Dejiu Chen,
David Servat
To cite this version:
Martin Walker, Mark-Oliver Reiser, Sara Tucci-Piergiovanni, Yiannis Papadopoulos, Henrik Lönn,
et al.. Automatic optimisation of system architectures using EAST-ADL. Journal of Systems and
Software, Elsevier, 2013, 86, pp.2467 - 2487. �10.1016/j.jss.2013.04.001�. �cea-01810011�
TheJournalofSystemsandSoftware86 (2013) 2467–2487
ContentslistsavailableatScienceDirect
The
Journal
of
Systems
and
Software
j ourna l h o m e p a g e :w w w . e l s e v i e r . c o m / l o c a t e / j s s
Automatic
optimisation
of
system
architectures
using
EAST-ADL
Martin
Walker
a,∗,
Mark-Oliver
Reiser
b,
Sara
Tucci-Piergiovanni
c,
Yiannis
Papadopoulos
a,
Henrik
Lönn
d,
Chokri
Mraidha
c,
David
Parker
a,
DeJiu
Chen
e,
David
Servat
caUniversityofHull,CottinghamRoad,HullHU67RX,UK
bTechnischeUniversitätBerlin,Ernst-Reuter-Platz7,D-10587Berlin,Germany cCEASaclayNano-INNOV,PointCourrierNo.174,91191GifsurYvettecedex,France dVolvoTechnology,Dept6260,M2.7,40508Gothenburg,Sweden
eKTHRoyalInstituteofTechnology,Brinellvägen83,10044Stockholm,Sweden
a
r
t
i
c
l
e
i
n
f
o
Articlehistory: Received31July2012
Receivedinrevisedform28March2013 Accepted1April2013
Available online 8 April 2013
Keywords:
Multi-objectiveoptimisation Architecturaldescriptionlanguages DependabilityAnalysis
TimingAnalysis
a
b
s
t
r
a
c
t
There are many challenges which face designers of complex system architectures, particularly safety–criticalorreal-timesystems.TheintroductionofArchitectureDescriptionLanguages(ADLs)has helpedtomeetthesechallengesbyconsolidatinginformationaboutasystemandprovidinga plat-formformodellingandanalysiscapabilities.However,managingthiswealthofinformationcanstill beproblematic,andevaluationofpotentialdesigndecisionsisstilloftenperformedmanually. Auto-maticarchitecturaloptimisationcanbeusedtoassistthisdecisionprocess,enablingdesignerstorapidly exploremanydifferentoptionsandevaluatethemaccordingtospecificcriteria.Inthispaper,wepresent amulti-objectiveoptimisationapproachbasedonEAST-ADL,anADLintheautomotivedomain,with thegoalofcombiningtheadvantagesofADLsandarchitecturaloptimisation.Theapproachisdesigned tobeextensibleandleveragesthecapabilitiesofEAST-ADLtoprovidesupportforevaluationaccording todifferentfactors,includingdependability,timing/performance,andcost.Thetechniqueisappliedto anillustrativeexamplesystemfeaturingbothhardwareandsoftwareperspectives,demonstratingthe potentialbenefitsofthisconcepttothedesignofembeddedsystemarchitectures.
© 2013 Elsevier Inc. All rights reserved.
1. Introduction
Achievingqualityattributessuchas dependability(e.g. mea-sured in terms of reliability, availability, and safety) and performance(e.g.measuredintermsofthroughputofinformation andresponsetimes)incomplexsystemsisachallengingtask.Itis beneficialtoconsidertheseattributesthroughoutthewholedesign process,factoringthemintoearlydecisionsandtherebyensuring thatqualityattributesarecontrolledfromtheearlystagesrather thanlefttoemerge(ornot)attheend,whenanyrequiredchanges wouldincurlargercostsanddelays.However,balancingthemany demandsonthesystemdesign canbedifficult,andthetaskof
Abbreviations: ADL,ArchitectureDescriptionLanguage;COE,Central Opti-misationEngine;FAA,FunctionalAnalysisArchitecture;FDA,FunctionalDesign Architecture;HDA,HardwareDesignArchitecture;OSDM,OptimisationSpace Def-initionModule;VRM,VariabilityResolutionMechanism.
∗ Correspondingauthor.Tel.:+44(0)1482465994. E-mailaddresses:[email protected](M.Walker),
[email protected](M.-O.Reiser),[email protected]
(S.Tucci-Piergiovanni),[email protected](Y.Papadopoulos),
[email protected](H.Lönn),[email protected](C.Mraidha),
[email protected](D.Parker),[email protected](D.Chen),[email protected]
(D.Servat).
exploringpotentiallyhugedesignspacesforoptimalconfigurations thatmaximisequality(i.e.,dependabilityandperformance)and minimisecostposesevenmorechallenges.
Recentworkonmodel-baseddevelopmenthaslookedintohow progressivelyrefinedmodelsofrequirementsanddesigncanbe usedtodrivethedevelopmentandverificationofcomplex sys-tems.ThisworkhasresultedinmethodslikeUMLandSysMLwhich enablesystemmodellingthatencompassesdescriptionof struc-ture,behaviourandallocationoffunctionstohardwareresources. More recently, ADLs such as AADL and the automotive EAST-ADLhaveemergedaspotentialfuturestandardsformodel-based design of embeddedsystems in thetransport andspace indus-tries.
Beyondmodellingofnominalbehaviour,theselanguagesalso incorporateerrormodellingsemanticsthatenabledependability analysis.Early workhasdemonstrated that dependability anal-ysisof EAST-ADL modelsis possibleviaHiP-HOPS (Chen etal., 2008)whiledependabilityanalysisofAADLerrormodelsis possi-bleviaconversiontofaulttrees(Joshietal.,2007)andGeneralised Stochastic Petri Nets (GSPN)(Feiler and Rugina, 2007). MARTE (www.omgmarte.org)isanothersignificantdevelopment, imple-mented asa UMLprofilefor thedesign ofreal-time embedded systems,enablingpredictionofotherqualityattributes,including performanceandschedulability.
0164-1212/$–seefrontmatter © 2013 Elsevier Inc. All rights reserved.
NewADLsarelikelytoinfluencethedesignoffuturedependable systems. These languages can achieve transparency and con-sistency in a model-based process but are not yet sufficiently developedtoguarantee effectiveassessment andsatisfaction of qualityattributes.Wecanidentifytwochallengesthatneedtobe tackledfromtheearlystagesofdesign:
(a)Ensuring effective prediction of quality attributes such as dependabilityandperformance,viauseofadvanced,scalable, automatedmodel-basedanalysistechniques.
(b)Enablingeffectiveexplorationofpotentiallyhugedesignspaces fordesignsolutionsthatachievebetteroroptimaltrade-offs amongdependability,performanceandcost.Wenotethatthis capabilityisparticularlyrelevantwherelittlepriordesign expe-rienceexiststoguideengineersinthedesignofasystem,e.g.in caseofinnovativedesignsorwhenrelativelyimmature tech-nologiesareemployed.
1.1. Analysisofarchitecturalmodels
Over the last fifteen years, in order to tackle the first of thesechallenges,workonmodel-baseddependabilityanalysishas resultedinnewapproachesthatpartlyautomateandthereby sim-plifythesynthesisofdependabilityevaluationmodels.Inseveral techniques,predictivesystemfailuremodelssuchasfault trees andFMEAs(FailureModesandEffectsAnalysis)areconstructed fromthetopologyof thesystemandcomponentfailuremodels usingaprocessofcomposition.Inthisapproach,automationand reuse of component failure modelsacross applicationsbecome possibletosomeextent.Compositionalityandcareful reuseare expectedtobringbenefitsindependabilityanalysissimilartothose introducedbyreuseoftrustedsoftwarecomponentsinsoftware engineering.Techniques that follow this approach include HiP-HOPS(Papadopoulosetal.,2001),ComponentandState-EventFault Trees(Grunskeetal.,2005)andtheFailurePropagationand Trans-formationCalculus(Wallace,2005).Anotherbodyofresearchwith similarobjectiveshasdevelopedintheareaofformalverification, focusingonautomateddependabilityanalysisofsystems repre-sentedasstateautomata(e.g.seeworkonAltarica(Bieberetal., 2004)andFSAP-NuSMV(BozzanoandVillafiorita,2007)).Inthese approaches,model-checkingis usedtoverify thesatisfaction of dependabilityrequirementsordetectviolationsofrequirements innormalorfaultyconditions.
Toolshavebeendevelopedtosupportthesedependabilityand performanceevaluationtechniquesandcomplexcasestudieshave beenreportedthatdemonstratebenefits.However,relatively lit-tleworkhasbeenappliedinthecontextofmodel-baseddesign (especiallyincombinationwithADLs).IntheATESST2and MAE-NADEUprojects,ithasbeendemonstratedthatscalableautomated dependabilityanalysiscanbeachievedviaharmonisationof EAST-ADLwithHiP-HOPS.Thisworkhasshownbenefitsfromtheability toproducecomplexfaulttreesandmultiplefailureFMEAsfrom designsexpressedinanADL(Chenetal.,2008).However,there isstillscopeforimprovementinthisworkthatcouldextendthe state-of-the-artinmodel-baseddependabilityanalysis.In princi-ple,AADLmodels—effectivelystateautomatashowingtransitions fromnormaltodegradedandfailedstates—canbeconvertedto GSPNsand then analysed for dependability (Feilerand Rugina, 2007).However,inthisapproach,itisnotpossibletoperform qual-itativeanalysis,i.e., establishmentof directcausalrelationships betweencausesandeffectsoffailureasinFMEA,whichis impor-tantwhenprobabilisticdataarenotavailable,e.g.atearlystages ofdesign.Analternativeapproachhasbeendemonstratedin(Joshi etal.,2007)viaconversionofAADLerrormodelstofaulttrees.The maindifficultywehaveidentifiedhereisthatthetemporal seman-ticsoftheAADLerrormodel(aformofstatemachine)arelostinthe
translationtocombinatorialfaulttreesandthispotentiallycauses seriouserrors.Tocorrectthisconceptualflawandenabletrue tem-poraldependabilityanalysis,weproposetoenableanalysisofAADL errormodelsviaHiP-HOPS,wherearecentlyintegratedtemporal logiccalledPandoracanbeusedtoachieveautomatedsynthesis andanalysisofdynamicfaulttrees,makingitpossibletocapture theoftensignificanteffectsofsequencingoffaults.Theproblem hasbeendiscussedin(WalkerandPapadopoulos,2009)anda gen-eralsolutionwasproposed;however,thissolutionstillneedstobe adaptedinthecontextofparticularmodellinglanguages.
Anotherissue,oftenignoredinmoderndependabilityanalysis techniques,isthatofseparationofconcernsindesign.Most model-baseddependabilityanalysistechniquesassumethatthemodel ofthesystem(whetherintheformofablockdiagramorastate machine)isafunctionalmodel,effectivelyajointrepresentation ofhardwareandsoftware.However,thisignorestheseparation ofconcernsthattypicallytakesplaceinpracticalmodelling,where peopletendtodevelopseparatemodelsforhardwareandsoftware and linkthosemodelswithallocation relationships.Such mod-elsarenotdirectlyanalysablebythepresentstate-of-the-art.In HiP-HOPS,aconcepthasbeendevelopedthatenablesintegrated dependabilityanalysisofdesignsthatarerepresentedinmorethan oneperspective(e.g.hardware,software,middleware)via assess-mentofthefaultpropagationthroughallocationrelationships.
Inthecontextoftiminganalysis,manymodel-basedapproaches have been recently developed for the automotive domain. ProjectssuchasATESSTand ATESST2(www.atesst.org),TIMMO (www.timmo.org),andEDONA(www.edona.fr)havebeencarried outtoprovideconcepts,toolsandmethodologiesforthe descrip-tionofautomotivearchitecturesandtimingproperties.
Amongthewiderangeoftiminganalyses,schedulability anal-ysis (Selic, 2000) is considered a good candidate for analysing timingpropertiesatthedesignstage.Amodel-basedframework forschedulabilityanalysishasbeendevelopedalongtheselines in the context of the EDONA project. This framework enables model-basedschedulabilityanalysisattheEAST-ADLdesignlevel. TheEAST-ADLdesignlevelincludesfunctionalarchitecture, hard-warearchitecture,andanallocationmodelstipulatingthemapping offunctionstohardwarenodes.Theschedulabilityframeworkis basedonsupplementingEAST-ADLwithconceptsfromthe mod-ellinglanguageMARTEfollowingtheprocedurepresentedbyAnssi et al. (2010). In this framework, schedulability analysis is per-formedafteramanualtransformationofEAST-ADLmodelstowards arefinedarchitecture:theMARTEtaskmodel.Themanual trans-formationestablishesthemappingoffunctionsontasks(including task priorities and periods). Then the framework provides an automatictransformationofMARTEtaskmodelstoanacademic schedulinganalysistoolcalledMAST(http://mast.unican.es).
It should be noted that in the EDONA approach, schedula-bility analysis verifies the task model, and does not directly verifythedesign-levelarchitecture.1Schedulabilityresults
there-fore have to be manually ‘fed-back’ to the design level by interpretingschedulability propertiesobtainedfromtheMARTE taskmodel.Furthermore,extrapolatingfeedbacktoimprovethe design-levelarchitectureiscumbersome oreven impossiblefor non-schedulabilityexperts.Thereasonforthisliesinthefactthat schedulabilityresultsdependnotonly ondesign-level architec-turepropertiesbutalsoonthechoicesmadeduringtherefinement towards the task model (e.g. priority assignment, task periods, schedulingpolicy,etc.).
1ItisworthnotingthatEAST-ADLlacksimplementation-likeconcepts,suchas
thetaskconcept,althoughotherlanguages(e.g.AUTOSAR)canbeusedtoovercome thislaterinthesystemdevelopmentprocess.
M.Walkeretal./TheJournalofSystemsandSoftware86 (2013) 2467–2487 2469
The ATESST2 and MAENAD projects made improvementsto model-based timing analysis for EAST-ADL models in order to produceautomaticfeedbackontheEAST-ADLarchitecture. Sim-plefeedbackcanbeobtainedbyanalysingarchitectureproperties which do not need refinement towards a task model, such as resource utilisation, which can becomputed only knowingthe allocation of functions/signalsto hardware resources.For more advanced indicators,suchas responsetime analysisoffunction activationchainsthattraverseseveralsharedhardwareresources, full schedulability analysis is still needed, which necessitates refinementtowardsataskmodeltoconfigureschedulability analy-sistools.However,byapplyingcontrolledrefinements,itispossible to produce automatic feedback at design level. In this paper weadoptoneofthesepossiblecontrolledrefinements,whichis detailedinSection2.4.
1.2. Optimisationofarchitecturalmodels
Model-basedanalysisandverificationtechnologiescanenrich a model-driven development process by answering important questionsregardingthequalityofindividualdesignproposals.In complex distributed systems, however, rich functionalities and their distribution across shared hardware and communication channelsallowalargenumberofconfigurationoptionsatdesign timeandalargenumberofreconfigurationoptionsatruntime.This createsdifficultiesindesign because,aspotentialdesign spaces expand,theirexplorationforsuitableoroptimaldesignsbecomes increasingly difficult.When a number of differentarchitectural configurationscanpotentiallydeliverthefunctionsofa system, designersarefacedwithadifficultoptimisationproblem.Assuming thatitistechnicallyandeconomicallypossibletofulfilallquality requirements,theymustfindanarchitecturethatentailsminimal developmentandotherlifecyclecosts.Ontheotherhand,if fulfill-ingoroptimisingallqualityrequirementsisinfeasible,thenthey mustfindthearchitectureorarchitecturesthatachievethebest possibletradeoffsamongqualityattributesandcost.Theproblemis compoundedbythefactthatqualityattributesareoftenconflicting, e.g.improvingsafetyoftenmeansnotonlyincreasingcostsbutalso reducingavailability.Thevariousformulationsoftheabove repre-senthard,multi-objectiveoptimisationproblemsthatcanonlybe approachedsystematicallywiththeaidofoptimisationalgorithms thatcanefficientlysearchlargepotentialdesignspaces.
Whilstmanydesignproblemscanonlybetackledeffectively bythehumanintellect,itisclearthat,aspotentialdesignspaces expand,theirexplorationforsuitableoroptimaldesigns(e.g.in termsofqualityandcost)becomesincreasinglydifficult,andsome automationisneeded.Modelling languagesand emergingADLs couldthereforebenefitfromconceptsandtechnologicalsupport thatenablethistypeofoptimisation,whilestillbenefitingfrom thesupportformultipleanalysisandevaluationfunctionsthatan ADLoffers.
Someworkhasrecentlybeendoneinthisfieldfromthe direc-tionofsafetyand reliabilityanalysis,thoughnotinthecontext ofADLs.ClassicaldependabilitymodelslikeReliabilityBlock Dia-grams(RBDs)(Konaketal.,2006)and,morerecently,advanced compositionaldependabilityanalysistechniquessuchasHiP-HOPS havebeencombinedwithmeta-heuristics(Pareto-basedGenetic Algorithms)toassistintheautomaticevolutionofdesignmodels thatcanmeetdependabilityandcostrequirements.HiP-HOPShas contributedtothisareabyenablingtheoptimisationofsystems thathaveanetworkedarchitecture(i.e.theyarenotnecessarilyin parallel/seriesconfigurationsasinRBDs)andbyovercomingthe traditionalassumptionmadeinRBDsthatacomponentorsystem eitherworksorfailsinasinglefailuremode(Papadopoulosand Grante,2005;Papadopoulosetal.,2011;Adachietal.,2011).
Recentworkthathasfocusedonenablingmulti-objective opti-misation of software architectures has ledto the development ofnewtoolsthatalsoofferablendofanalysisandoptimisation capabilities.Onesuchtool isPerOpteryx,whichisbasedonthe Palladiomodellingenvironment(Martensetal.,2010;Koziolekand Reussner,2011).PerOpteryxallowsfortheautomaticoptimisation ofsoftwarearchitecturemodels,developedwithPalladiousingthe PalladioComponentModel(PCM),onthebasisoffourmain qual-itydimensions:cost,reliability,maintainability,andperformance. OneparticularadvantageofPerOpteryxisitsabilitytotake advan-tageofdomainspecificknowledge,suchasperformancetactics,to enhancetheoptimisation(Kozioleketal.,2011).
AnothertoolisAQOSA(AutomatedQuality-drivenOptimisation ofSoftwareArchitecture),whichusesmodeltransformation tech-nologytoconvertinputmodels(e.g.fromAADLorageneralUML2 model)intoanintermediateformat(AQOSA-IR)thatcanbeused asthebasisoftheoptimisationprocess(EtemaadiandChaudron, 2012).Differentcandidatesareprovidedbyarepositoryof possi-blecomponents,andasetofexternalobjectivefunctionplugins providestheevaluationthatdrivestheprocess.AQOSAisdesigned tobeindependentofanygivendomainspecificlanguage(DSL)or ADL,butthereforereliesonacorrectmodeltransformationtoits ownintermediatemodeltoperformtheoptimisation.
Finally,otherworkbyGrunskeetal.hasshownthepotentialof usingvariousmeta-heuristicsfordependabilityversuscost optimi-sationofarchitecturaldesigns.ThisworkhasbeenappliedtoAADL modelsandalsolooksatotheroptimisationapproachesbeyond geneticalgorithms,e.g.anttrailalgorithms(Aletietal.,2009a,b; Meedeniyaetal.,2010,2011;MeedeniyaandGrunske,2010).An introduction tothemodel-based optimisationfield canalso be foundinGrunskeetal.(2007),andawidersurveyofliteratureon architecturaloptimisationtechniquescanbefoundinAletietal. (2012).
Alloftheapproachesmentionedaboveexploitmeta-heuristics tosearchadesignspaceforoptimalsolutions.However,they oper-ateondifferentmodels(EAST-ADL,PCM,AQOSA-IRetc.)anduse differentmeansofdefiningthedesignspace(e.g.variability mech-anisms).Theyalsoaddressdifferentobjectives,whichtheydefine indifferentways,andusedifferenttechniquestoevaluatethose objectives.Theaimofthispaperistocontributetothestateof theartbydevelopinganapproachwhichbringsaunique combi-nationofobjectiveevaluationtechniques(e.g.HiP-HOPS,MAST) derivedfrominformationobtainedfromthevariability capabili-tiesandqualityattributesprovidedbyEAST-ADL.Therefore,while there are both commonalities and differences across the opti-misationapproachesmentionedabove,webelieveourapproach offersauniqueconfigurationthatcombinesthebenefitsof exter-nalanalysistoolsandtheall-in-onemodellingcapabilitiesoffered byEAST-ADL.
1.3. Contributionsofthepaper
Inthispaper,weshowhowearlierworkondesignoptimisation, e.g.workdevelopedinthecontextofHiP-HOPS,canbetransferred tomodel-baseddesign—specificallyinthecontextoftheEAST-ADL language.Thenovelcontributionsofthepaperare:
• Thedevelopmentofageneralmethodforautomatic optimisa-tionof EAST-ADL modelsvia geneticalgorithms.The method sofarenablesevaluationofunavailability,simplecostmetrics, andschedulability ofcandidatedesignstodrivethe optimisa-tion,butcouldbeextendedinthefuturetootherfunctionaland non-functionalattributesaswell.
• The use(inthe contextof optimisation)of advanced mecha-nisms which allowadequateparameterisation of modelsand
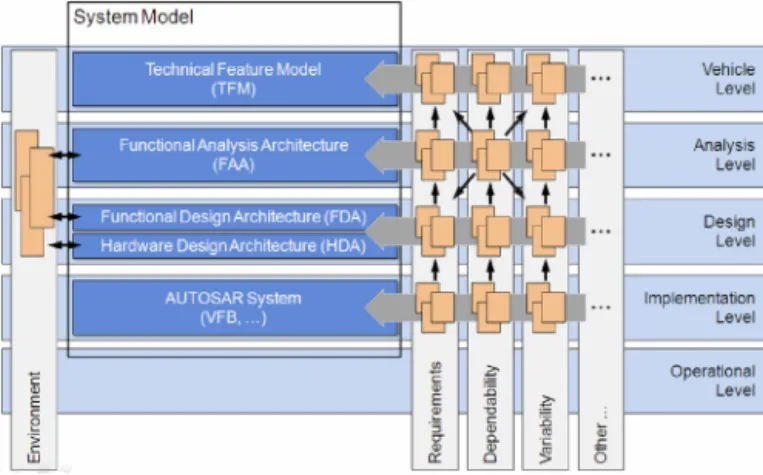
Fig.1. TheEAST-ADLabstractionlevels(http://www.east-adl.info/).
expressionofdesignvariabilityinthelanguagewherethemodel isexpressed(i.e.,EAST-ADL).
• Applicabilityoftheapproachonarchitecturalmodelswhichare represented in multiple perspectives, i.e., separate hardware andsoftwaredesigndiagramswhicharelinkedwithallocations ofsoftware tohardware. Thisis a non-trivialmatter asmost approachestodependabilityandoptimisationassumeasingle functionalmodelofthesystemasbasisforanyanalysis. • Theuseofannotationsofacorestructuralmodeltoformalise
timing,cost,energyconsumption,etc.forthepurposeof architec-tureevaluationasapartofoptimisation.Themodularapproach makesitpossibletoprovideannotationsconsistentwith vari-ants,andcorrespondingtotheinputneedsforfitnessfunctions oftheintendedoptimisation.Whilstnotalloftheseannotations arecurrentlyexploited,theoptimisationarchitecturedescribed inthepaperisextensibleandcouldtapfurtherintothewealth ofdesigninformationcapturedwithinanEAST-ADLmodel.
Inthenextsection,weshalldescribeEAST-ADL,itsmajor fea-tures,anditscapabilitiesforlinkingwithexternalanalysistoolsto performsafetyandtiminganalyses(amongstothers).InSection3, wedescribethemulti-objectiveoptimisationconceptandthetool architecturebeingdevelopedtofulfilthisconcept,andinSection4 weapplytheapproachtoasimpleexamplesystemtoillustrate manyof theadvancesmentioned above(multiple perspectives, variabilityrepresentation,timinganddependabilityinformation etc.).FinallywepresentourconclusionsinSection5.
2. RepresentingsystemarchitectureswithEAST-ADL
2.1. IntroductiontoEAST-ADL
EAST-ADL is an Architecture Description Language (ADL) initiallydefinedintheEuropeanITEAEAST-EEAprojectand subse-quentlyrefinedandalignedwiththemorerecentAUTOSAR auto-motivestandard(www.autosar.org).Currently,itismaintainedand evolvedbytheEAST-ADLAssociation(www.east-adl.info).
EAST-ADLisanapproachfordefiningautomotiveelectronic sys-temsbywayofacomprehensiveinformationmodelthatcaptures engineeringinformationinastandardisedform.Aspectscovered includevehiclefeatures,functions,requirements,variability, soft-warecomponents,hardwarecomponentsandcommunication.
Asaguidingprinciple,EAST-ADLdefinesmultipleabstraction levelsanddistributesalldevelopmentinformationacrossthese lev-els(seeFig.1).Thus,software-andelectronics-basedfunctionality ofthevehicleisdescribedatdifferentlevelsofabstraction dur-ingthedevelopmentfromearlyanalysistoimplementation.The proposedabstractionlevelsaretailoredtoprovideaseparationof
concernsandanimplicitstyleforusingthemodellingelements. Theembeddedsystemiscompleteoneachabstractionlevel,and partsofthemodelarelinkedwithvarioustraceabilityrelations. Thismakesitpossibletotraceanentityfromfeatureleveldownto componentsinhardwareandsoftware.
The features in themain technical feature model atvehicle levelrepresentthemajorfunctionalitiesandcharacteristicsofthe completesystem,i.e.,theentirevehiclefromatop-level perspec-tive, without exposing any realisation details. It is possible to managethecontentofeach individualvehicleandentire prod-uctlinesinasystematicmanner.Inadditiontothismainfeature modelwithitstechnicalperspective,otherfeaturemodelsmay bedefinedthatprovideviewsonthemainfeaturemodel,e.g.a customer/marketing-orientedviewdefiningmodelsandpackages ofoptionalequipment.
Acompleterepresentationoftheelectronicfunctionalityinan abstractformismodelledintheFunctionalAnalysisArchitecture (FAA).Thepurposeistodefineandstructurethesystem’s function-alityfromaproblemdomainperspective,similartoatraditional functional analysis.Entities ofthe FAA,so-called analysis func-tions,capturetheprincipalinterfacesandbehaviourofthevehicle’s subsystems.
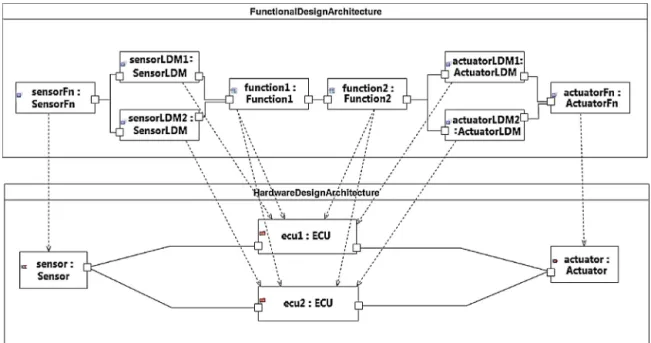
Thesolutiondomainaspectsareintroducedwhiledefiningthe design level, which comprises the Functional Design Architec-ture(FDA)andtheHardwareDesignArchitecture(HDA).TheFDA definesafunctionarchitecturethattakesintoaccounthardware allocation,efficiency,legacyandreuse,commercial-off-the-shelf (COTS)availability,andotherarchitecturalqualities.Thefunction structureissuchthatoneormorefunctionscanbesubsequently realisedbyoneorseveralAUTOSARsoftwarecomponents (SW-C).Theexternalinterfacesofsuchcomponentscorrespondtothe interfacesoftherealisedfunctions.Ontheotherhand,theHDA definestheexecutionenvironmentinwhichthesoftwarewillbe deployed.Itsmainentitiesaresensors,actuators,unitsof execu-tion,theirinterfaces,andcommunicationlinksbetweenallthese. Finally,theallocationjoinstheFDAandHDAbydefiningforeach softwareentityintheFDAonwhichunitofexecution,asdefined intheHDA,itwillreside.
On the lowest, most concrete abstraction level, the imple-mentationlevel, EAST-ADLdoesnot provideits ownmodelling entities;instead,thislevelisentirelydefinedbymodelsfromthe AUTOSARstandard.In thisrespect,EAST-ADLcanbethoughtof asanextensiontoAUTOSARprovidingsupportformodellingon higherabstractionlevelsduringearlierdevelopmentphases. How-ever,traceabilityissupportedfromimplementationlevelelements (AUTOSAR)toFDA/HDAelementsand,fromthere,furtherupto vehiclelevelelements.
Verifyingandvalidatingafeatureacrossallabstractionlevels, byusing simulation or formaltechniques,requires an environ-mentmodelfromtheearlystagesofthedesignprocess.This“plant model”capturesthebehaviourofthevehicledynamics,driver,etc. Thecorepartoftheenvironmentmodelcanbethesameforall abstractionlevels,whichmeansthat,forthepurposeof simula-tion,bothFAAandFDA/HDAareattachedtothesameenvironment model.
2.2. VariabilitymodellinginEAST-ADL
EAST-ADLprovidesextensivesupportfor managing variabil-ity,whichisakeyelementoftheEAST-ADL-basedoptimisation approachpresented inthis article.First,variability modellingis used to define the optimisation space (also referred to as the “architecturaldegreesoffreedom”inAletietal.(2012))andthen configurationandvariabilityresolutionareappliedtoproducethe individualoptimisationcandidatestobeevaluatedwithrespect totheoptimisationobjectives.Beforegoingintomoredetail on
M.Walkeretal./TheJournalofSystemsandSoftware86 (2013) 2467–2487 2471
Fig.2.FeaturemodelsondifferentEAST-ADLlevelsandtheconfigurationlinksconnectingthem.
theoptimisationapproachinSection3,wethereforedescribethe EAST-ADLvariabilitymanagementconceptshere.
ModellingofvariabilityinEAST-ADLstartsonthevehiclelevel, wheremodelrangefeaturesandvariabilityarerepresented.Atthis point,thepurposeofvariabilitymanagementistoprovideahighly abstractoverviewofthevariabilityinthecompletesystemtogether withdependenciesbetweenthese“variabilities”.A variabilityin thissenseisacertainaspectofthecompletesystemthatchanges fromonevariantofthecompletesystemtoanother.Inthisabstract overview,theideaisnottospecifyhowthesystemvarieswith respecttoanindividualvariabilitybutonlythatthesystemshows suchvariability.Forexample,thefrontwipermayormaynothave anautomaticmode.Atvehiclelevel,theimpactofthisvariabilityon thedesignisnotdefined;onlythefactthatsuchvariabilityexistsis definedbyintroducinganoptionalfeaturenamed “RainControlled-Wiping”.Thisissubsequentlyvalidatedandrefinedduringanalysis anddesign.
Oneormorefeaturemodelsmaybedefinedonthevehiclelevel: thecoreTechnicalFeatureModel—themainfeaturemodelinan EAST-ADLsystemmodel—isusedtodefinethecompletesystem’s variabilityonagloballevelfromatechnicalperspective,andoneor moreoptionalProductFeatureModelscanbeusedtodefineviews onthistechnicalvariabilitywhichcanbetailoredtoaparticular view-pointorpurpose,e.g.themarketing-orientedendcustomer perspective.AnexampleofthisisshownatthetopofFig.2.
Whilethedetailsofhowvariabilityisactuallyrealisedinthe sys-temarelargelysuppressedatthevehiclelevel,theyarethefocusof attentionwhenmanagingvariabilityintheFAA,FDAandHDA.In fact,aspecificvariabilitymayleadtomodificationsinany develop-mentartefact,suchasrequirementsspecificationsandfunctional models.Here,describingthataspecificvariabilityoccursisnot suf-ficient;itisnecessarytodescribehoweachvariationaffectsand modifiesthecorrespondingartefact.
Thepurposeoffeaturemodellingistodefinethe commonali-tiesandvariabilitiesoftheproductvariantswithinthescopeofa productline.Featuremodelsarenormallyusedonahighlevelof abstraction,asdescribedaboveforvehiclelevelvariability. How-ever,inEAST-ADL,theyarealsousedonanalysisanddesignlevels andacquireamuch moreconcrete meaningthere:theycanbe
attachedtoanalysisand design functionsandare thenused to exposethevariabilitywithinthisfunctiononly.Fig.2illustrates thisfortheFAA:thetop-levelanalysisfunction“Car”containsa subfunction“WiperSystem”whichinturnconsistsofthe subfunc-tion“RainSensor”and“WiperController”;alltheanalysisfunctions “Car”,“WiperSystem”and“WiperController”haveafeaturemodel attached.
Inadditiontotheirfeaturemodel,analysisanddesignfunctions maycontainvariationpointsdefining howthefunction’s struc-turevariesfromonesystemconfigurationtoanother.InEAST-ADL, suchstructuralvariationcanberepresentedbymarkingstructural entities—e.g.subfunctions,ports,connectors—asoptional,whichis denotedgraphicallybyadashedline.Fig.2presentsanexample: the“WiperSystem”hasanoptionalsubfunction“rs”oftype “Rain-Sensor”.Allactualsystemvariationonanalysisanddesignlevelis definedusingthisstraightforwardconceptofoptionalstructural entities.
Configuration decision modelling is another key variability management concept in EAST-ADL: the configuration of a tar-get featuremodel FMT—i.e. theselection and deselection ofits
features—isdefinedintermsoftheconfigurationofanotherfeature modelFMS,calledsourcefeaturemodel.Aconfigurationdecision
modelcanthusbeseenasadirectedrelationfromFMS toFMT
thatallowsustoderiveaconfigurationofFMTfromanygiven
con-figurationofFMS.InEAST-ADL,thismechanismisusedtodefine
howacertainconfigurationonahigherlevelaffectsthebinding ofvariabilityonlowerabstractionlevelsandinlower-level com-ponents.Again,Fig.2providesanexample:configurationlinksare depictedasdashedarrowsandaredefinedbetweenallthefeature models;theonefromthe“TechnicalFeatureModel”tothe fea-turemodelattachedto“Car”,forinstance,defineshowtoconfigure the“Car”analysisfunctiondependingonagivenconfigurationof thecoretechnicalfeaturemodelonvehiclelevel;notehowthis configurationlinkcrossesabstractionlayerswhilethelinksfrom the“Car”tothe“WiperSystem”featuremodelcrossescontainment hierarchieswithintheanalysisarchitecture(thesameappliesto theFDAandHDA,butthiswasomittedfromthefigure).Similarly, configurationlinksareusedtodefinehowthestructural variabil-itywithinanalysisanddesignfunctionsisresolveddependingon
agivenconfigurationofthefunction’sfeaturemodel.For exam-ple,theconfigurationlinkinthe“WiperSystem”functionofFig.2 stateshowtheoptionalsubfunction“rs”willbeselectedor dese-lecteddependingontheconfigurationofthewipersystem’sfeature model.
Variabilitymanagementonanalysisanddesignlevelisdriven bythevariabilityidentifiedonthevehiclelevel.Thismeansthatthe maindriverforvariabilitydefinitionandalsovariability instantia-tionisthevehicle-levelfeaturemodel.Variabilityspecificationin FAAandFDA/HDAessentiallyconsistsofthedefinitionof varia-tionpointswithintheanalysisanddesignfunctions(intheformof optionalsubfunctions,connectorsandports).Asmentionedabove, featuremodelscanbeattachedtofunctionsin ordertoexpose thevariabilitywithinthesefunctionsandhidetheactual structur-ing,representationandbindingofthisfunction-internalvariability. Thisway, thebenefits of information hiding canbe appliedto thevariability representationand variabilitybindingwithinthe containmenthierarchyoffunctionsin theFAAand FDA/HDAof EAST-ADL.
Insummary,EAST-ADLprovidesthemeanstodefine variant-richsystemsandtoorganisethisinformationsuchthatanentire, fullyresolvedsystemconfigurationcanbederivedautomatically fromtheconfigurationofasinglefeaturemodelonvehiclelevel. Forthepurposeofthisarticle,thismeansthatwecandefinethe optimisationspace,i.e.thesetofsystemstobeevaluated,byway ofEAST-ADL’s variabilitymodelling conceptsand then produce individualcandidateswithinthisoptimisationspacebyapplying EAST-ADL’sconfigurationandvariabilityresolutionmechanisms. 2.3. DependabilityanalysisofEAST-ADLmodelswithHiP-HOPS
EAST-ADLofferspowerfulfaultmodellingcapabilitiescentred onitsErrorModelconcepts.TheErrorModelinEAST-ADLisa sepa-ratemodellingview,paralleltothenominalsystemmodelsoneach level,andallowssystemdesignerstospecifyhowthesystem ele-mentscangeneratefailuresandhowthosefailurescanpropagate tootherpartsofthesystem.
AswithotherpartsofEAST-ADL,theErrorModelonlystores information;analysiscapabilitieshavetobeprovidedbyan exter-naltool.AspartoftheATESST2andMAENADprojects,significant effort has gone into enabling the HiP-HOPS (Hierarchically-PerformedHazardOriginandPropagationstudies)safetyanalysis tool toanalyse EAST-ADL modelsby meansof model transfor-mationtechnology.Thishasentailedsomeharmonisationofthe errormodellingconceptsinbothEAST-ADLandHiP-HOPSandthe resultisapowerfuldependabilityanalysiscapabilityforEAST-ADL models.
AHiP-HOPSanalysishasthreemainstages: • Faultmodellingandfailureannotation
• Synthesis of fault trees to model the propagation of failure throughthesystem
• FaultTreeAnalysis(FTA) andsynthesis of Failure Modes and EffectsAnalysis(FMEA)tables
Thefirstphaseismanuallyperformedandconsistsof annotat-ingtheelementsofthesystemmodel(orinthiscase,theEAST-ADL errormodel)withlogicalexpressionsthatdescribetheirlocal fail-urebehaviour,i.e.,whatoutputfailurestheypropagate(knownas outputdeviations)andhowthoseoutputfailuresarecausedbya mixtureofinputfaultsandinternalfailuremodes.Intheirbasic form,theseexpressionstaketheformofafailureclass(e.g. commis-sion,omission)andthenameoftheportandcomponentwherethe deviationoccursandcombinesthemwithlogicaloperatorssuchas ANDandOR.Forexample:
Omission-Actuator.out = Omission-Actuator.in OR ActuatorStuck
indicatesthatanomissionofthe‘out’portofanactuator compo-nentiscausedbyeitherasimilaromissionreceivedatthe‘in’port oftheActuatororaninternalfailuremodecalled“ActuatorStuck”, which mayalsohaveprobabilistic failuredata(e.g.failure rate, repairrate,MTTFetc.)defined.Such expressionscantakemore complexformstoexpressgeneralisedpatternsofcomponent fail-urebehaviour.
Thesecondandthirdphasesareconductedautomaticallyby HiP-HOPS.First,anetworkofinterconnectedfaulttreesis synthe-sisedbycombiningthelogicalexpressions,therebyshowingthe relationshipbetweensystemhazardsandcombinationsof individ-ualcomponentorfunctionfailures.Inthethirdphase,thefaulttrees areanalysedusingFTAreductionalgorithmstoobtaintheminimal causesofsystemfailurestogetherwithestimatesforthe probabil-itiesofthosefailures.ThisinformationisusedtoconstructFMEA tableswhichshownotonlytheeffectsofeachindividualfailure mode,butalsotheeffectsofmultiplefailuremodesoccurringin conjunction.
2.3.1. Multi-perspectiveanalysisinHiP-HOPS
One of the biggest differences between theHiP-HOPS error modelandtheEAST-ADLapproachisthatEAST-ADLdoesnotlimit thesystemmodellertoasinglearchitecture,asHiP-HOPSdoes.Not onlyaretheErrorModelandnominalmodelseparate,but EAST-ADLprovidesmultiplelayersorlevelsofpotentialmodellingas wellasdifferentviewsorperspectivesofamodel.HiP-HOPScanbe appliedtoEAST-ADLmodelsatboththeanalysisanddesignlevels, eachofwhichmaycontainanumberofdifferentperspectives.For example,attheanalysislevel,theprimarymodellingperspective istheFunctionalAnalysisArchitecture(FAA),whichprovidesan abstractviewofthefunctionsofthesystemandwhichwillhavea similarlyabstractErrorModelattached.Later,atthedesignlevel, themodelmaybeseparatedintotheFunctionalDesign Architec-ture(FDA),whichrepresentstheconcretefunctionalperspective, and theHardware Design Architecture (HDA), representingthe hardwareperspective,andeachofthesemayhaveaseparate—but interrelated—ErrorModel.
In HiP-HOPS, software and hardware are usually modelled togetheraspartofthesamearchitecture,withsoftwarefunctions beingdefinedassubcomponentsofhardwareelements.Thiscan beemulatedinEAST-ADLbycombiningeverythingintoasingle perspective,buttheadvantages ofhavingmultipleperspectives arethenlost.Instead,inordertomakeitcompatiblewith EAST-ADLandtoallowforthepropagationoffailuresfromsoftwareto hardwareorviceversa,HiP-HOPShasbeenextendedwithnative multi-perspectivecapabilities,asshowninFig.3.
InEAST-ADL,hardwareandsoftwareentitiescanbein sepa-ratearchitectures(e.g.HDAandFDA)andtherelationfromone perspectivetotheotheris accomplishedbymeansofallocation relationships,inwhichsoftwarefunctionsareallocatedtothe hard-warecomponents that execute them. Failuresof the hardware componentswillpropagatetothesoftwarefunctionsallocatedto them.HiP-HOPSnowprovidesthesamecapabilities,andin addi-tiontoanoutputdeviationbeingcausedbyaninputdeviationor aninternalfailuremode,itmaynowalsobecausedbyafailure propagatedfromthecomponentthecurrentfunctionisallocated to.Forexample:
Omission-Function.out = Omission-Function.in OR FromAllocation
M.Walkeretal./TheJournalofSystemsandSoftware86 (2013) 2467–2487 2473
Fig.3. Multi-perspectivemodellinginHiP-HOPS.
Thisspecifiesthattheomissionofoutputfromasoftware func-tioniscausedeitherbyalackofinputoraparticularfailure(power failureinthiscase)beingpropagatedfromthehardware compo-nentthatthefunctionisallocatedto.
Furthermore,inbothEAST-ADLandnowinHiP-HOPS,itis possi-bletodefinemorethanonepossibleallocation,e.g.usingvariability constructsinEAST-ADL.Thisallowsscopeforpotential optimisa-tionofthemodelonthebasisofchangingtheallocationofsoftware functionstodifferenthardwarecomponents.
The introduction of multiple perspectives to HiP-HOPS has necessitatedachangetothesemanticsofcommoncausefailures, which HiP-HOPS previously treated asglobal failures. Whereas before common cause failures (CCFs) were globally accessible throughoutthemodel,andcouldcauseafailureofany compo-nent,nowCCFsaredefinedpermodellingperspective,andthusa CCFdefinedforthehardwareperspective(e.g.flooding,fire)would notbeaccessiblefromafunctioninthesoftwareperspective,for instance.
Foranyrarecaseswherearbitrarycross-perspective propaga-tionisrequired,HiP-HOPSprovidesa‘Goto’declaration.Thisallows failurestopropagatefromonecomponentinoneperspectiveto anothercomponentinadifferentperspective(or,forthatmatter, inthesameperspective),evenifthosecomponentsdonotsharean allocationrelationship.
Becausethesenewconnections(allocationsandgotos)connect toexisting HiP-HOPSconstructs(namely,outputdeviationsand thenormallocalfailurelogic),theyfitrelativelyseamlesslyinto theHiP-HOPSfaulttreesynthesisprocess.Oncethefaulttreesare generated,theycanbeanalysed asnormal withoutanyfurther distinctionbetweenoneperspectiveandanother.
ThisharmonisationofEAST-ADLandHiP-HOPSerrormodelling conceptsprovidesapowerfuldependabilityanalysiscapabilityfor EAST-ADLmodels,allowingfaultpropagationtobetracedacross severaldifferentmodellingviews.Thisalsoenablesoptimisation ofEAST-ADLmodelsusingdependabilitycharacteristics(e.g.safety, unavailability)asobjectives,asshowninSection4.
2.4. TiminganalysisofEAST-ADLmodels
EAST-ADL, and specifically its Timing Extension, provides a rich setofconceptsto supporttiminganalysis.The term “tim-ing analysis”, however, encompassesa wide range of analyses applicable to different models (and levels of abstraction) pro-ducedduringthedevelopmentprocess.High-levelanalyses,such
asusingmodel-checkingfortheverificationofthetiming prop-ertiesofthefunctionalmodel,canusuallybeemployedfromthe verybeginningofthedevelopmentprocess,assoonasfunctional behavioursaredefined.Conversely,low-levelanalyses,suchastask levelschedulabilityanalysis,computetimingpropertiesof func-tionswhenconceptuallyexecutedondetailedsoftware/hardware resourcemodels.Theseresourcemodelsincludeinformationabout processor/busschedulersandtask/messageconfigurationsandare ingeneralproducedatlaterstagesofthedevelopmentprocess.
Inthispaperweareprimarilyinterestedinthedesignlevelof EAST-ADL,wheretheallocationoffunctionsonhardwarenodes isdefinedandtiminganalysiscanbeappliedinconjunctionwith dependabilityanalysis.Specifically,thedesign-levelconceptsused bytheanalysisare:
(1)activationchainsoffunctions,therateoftheiractivation,worst caseexecutiontimesoffunctionsandend-to-enddeadlines; (2)thetopologyofthehardwarenetworkintermsofprocessors
andthebusesthatconnectprocessors; (3)theallocationoffunctionsonprocessors.
These concepts come from EAST-ADL’s FunctionModelling, HardwareModellingandTimingaspects,andarespecifiedinthe FDA,theHDA,andtheassociatedTimingViewrespectively.
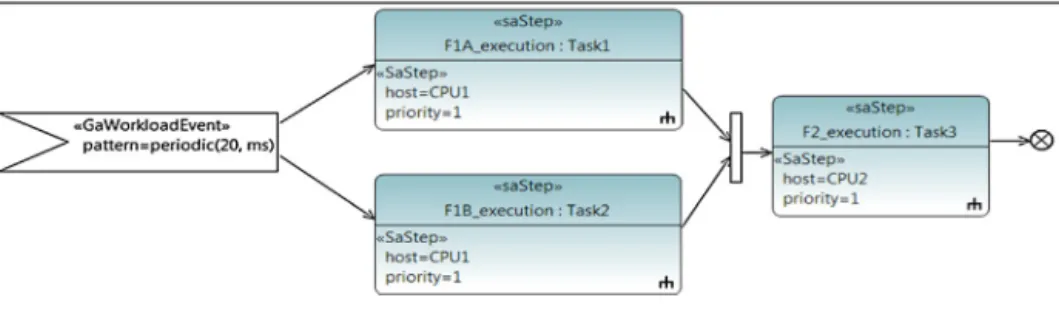
Timinganalysisatthisstageaimstoevaluatetheimpactthat hardware resources may have on the execution of functions, althoughitmakesuseofmoreabstractresourcesthanthoseused byschedulabilityanalysis(notasks,schedulers,etc.).Togivea sim-pleexampleontheimportanceofevaluatingtheresourceimpact onfunctionexecution,letusconsiderthearchitecturein Fig.3. Inthisexample,FunctionsF1AandF1Bdonothaveprecedence dependencies,sotheycanbelogicallyexecutedinparallel.Asa comparison,assumethatthetwo functionsareallocatedonthe sameCPU,meaningthatF1AandF1Bareexecutedsequentially. NowletusconsiderthatFunctionF2mustproduceavalueforeach cycleofdurationT(deadline).IneachcycleF2mustconsumeat leastonevalueproducedbyF1AandoneproducedbyF1Binthe samecycle.Itisclearthatifthetwofunctionscouldbeexecuted inparallelandstartatthebeginningofthecycle,inputvaluesfor F2willbeavailableaftermax(C1,C2),whereC1andC2are esti-matedworstcaseexecutiontimes.Ontheotherhand,incaseof sequentialexecution,theinputvaluesforF2willbeavailableonly aftersum(C1,C2).Thesesituationsmustbecarefullyanalysedas
Fig.4. MARTEtaskmodel.
theeffectofaccessinghardwareresourcesmayleadtoresponse timesviolatingdeadlines.
Tothisend weproposeanapproachthatprovidesa connec-tiontotheMAST analysistooland givesautomaticfeedbackto theEAST-ADLmodel.AsstatedinSection1.1,weneedtosolve themismatchbetweentheschedulabilityanalysislevel(wherethe MASTtoolworks)andtheEAST-ADLdesignlevel.Tothisend,we devisedacontrolledrefinementtowardsataskmodelthatensures theMASTresultsprovidevaluableinsightintotheEAST-ADLlevel. Itshouldbenotedthatthisrefinementmaybeembeddedinamodel transformationthatistransparenttotheuser.
Thecontrolledrefinementperformsa1:1mappingofEAST-ADL functionstoMARTEtasks.Ataskmustbeconfiguredintermsof periodsandpriorities;thecontrolledrefinementassignstoatask theperiodofthefunctionitismappedto,and allprioritiesare fixedtothesamevalue.Theeffectofassigningthesamelevelof prioritiesforallthetasks(functions)allowsforthecomputingofthe upperboundonworstcaseresponsetimes,i.e.,anyotherpriority assignmentwillimproveresponsetimes.Thiseffectisexplained bythewayinwhichresponsetimesarecomputedbyMASTwhen prioritiesareatthesamelevel.
Toclarifythispoint,considertheexampleinFig.3again. Apply-ingourcontrolledrefinement tothis modelmeansobtaining a MARTEmodelasshowninFig.4.Eachfunctionishererepresented byataskexecutingthefunctionitselfattherateof20ms,expressed byanexternaltrigger.PrioritiesandallocationstoCPUsarealso shown.Thedeadlineof20msfortheentirecycleisalsospecified.
OncetheEAST-ADLmodelistransformedintoaMARTEmodel, MASTcanbeappliedtocomputetheresponsetime.Theresponse timeisobtainedbyconsideringworstcase executiontimesand theadditionaldelaycausedbysequencingF1AandF1BonCPU1 (forsakeofsimplicitywedonotconsidercommunicationdelaysin theexample).Infixed-priorityschemes,theadditionaldelaydueto sequencingexecutionsiscalledpre-emptiontime.Rememberthat underordinarycircumstances,thehighestprioritytaskwillaccess theCPUfirstandlowerprioritytaskswillaccessafterhigher prior-itytasksterminatetheirexecution.Thetimespentbyataskwaiting forhigherprioritytaskstoexecuteisthepre-emptiontime.The globalpre-emptiontimeisthesumofallpre-emptiontimesforall tasks.Obviously,toimproveresponsetime,theglobalpre-emption timeshouldbeminimised.2Butwhathappensifprioritiesareset
tothesamelevel,asinourcase?MASTinthiscaseconsidersthat eachtaskispre-emptedbyallothertasks.IncaseofFig.4theglobal pre-emptiontimeonCPU1willbesum(C1,C2).Anyother assign-mentconsideringdifferentlevelsofprioritywillgivealowervalue fortheglobalpre-emptiontimeonCPU1(C1orC2).
2 Itshouldbenotedthattheworstcase,inwhichallthetasksareactivatedat
thesametime,isassumedbytheanalysis,sothatthepre-emptiontimeisalways includedintheresponsetime.
Theglobalpre-emptiontimecouldbedecreasedbyreducing thenumberoftasks.Intheexample,analternativemappingwith thetwofunctionsonasingletaskwouldmeanreducingthe pre-emptiontimeonCPU1to0,asonlyonetaskrunsinCPU1.Indeed, the1:1mappingisanothersourceofpessimismthatgivesusthe worstresponsetime,independentofimprovementsthatcanbe achievedlaterbyapplyingsmarterrefinementstowardsalternative taskmodels.
Onceithasbeenestablishedthattheresponsetimecanonly beimprovedbysubsequentrefinements,itcanbecorrectly inter-pretedinEAST-ADLasasufficientcondition.Aresponsetimethat meetsdeadlinesatthetasklevelimpliesthattheEAST-ADL archi-tecturecanbeconsideredvalid.Ontheotherhand,anegativeresult doesnotnecessarilyimplyadesignerrorforschedulability. Expe-riencesuggeststhatthisdoesnotpresentaproblemifthedesigner isawareofthischaracteristic.Furthermore,acomplementaryand lessconservativeanalysiscouldbemadewhereaperfectpriority assignmentisassumed.Thiswouldservetoassessfeasibilityofthe architecture.
TheresponsetimecomputedwithMASTundertheproposed controlledrefinementallowsustocomparedifferentarchitectures fromatimingpointofview,enablingarchitectureoptimisationas describedinSection4.
3. OptimisationofEAST-ADLarchitectures
Model-basedsystemsanalysistechniquesallowagreatdealof informationtobeobtainedaboutasystem,includingits depend-abilityandtimingcharacteristics,amongstothers.Thisisespecially truewhentheseanalysistechniquesarecombinedwithADLslike EAST-ADL,whichservetocentralisealltheknowledgeabouta par-ticularsystem,sinceitisnolongernecessarytoproduceaspecific errormodeltailoredforaparticulardependabilityanalysistool,or aseparatetimingmodelsolelyfortiminganalysisetc.
However,asmentionedearlier,thiswealthofinformationcan alsobedifficulttomanage.Achievingabalancebetweenthe dif-ferentattributerequirementsduringthedevelopmentofcomplex systemsbecomesproblematic,bothbecausethereisavast num-berofpossibledesignalterationsthatcouldbemadeandbecause theinterrelationshipsbetweentheattributes—andthereforethe effectsofanyalterations—arenotnecessarilyclear.Thisis particu-larlytruewhentradeoffsbetweenmultipleconflictingattributes (like safety versus cost, or energy consumption versus perfor-mance)areinvolved, as improvingoneattribute maylead toa worseningofanother.
The increasing automation of analysis techniques helps overcomethistoanextent,assumingtheautomatedtoolsare com-patiblewiththemodelinquestion.Suchtoolsallowmodelstobe rapidlyevaluatedaccordingtodifferentcriteria,enablingdesigners toquicklyseetheeffectsofanychangestothedesign architec-tureandinformingdesigndecisionsaspartofaniterativeprocess.
M.Walkeretal./TheJournalofSystemsandSoftware86 (2013) 2467–2487 2475
Evenwiththisautomation,evolvingthedesignmanuallyisstilla complexandtime-consumingprocess,relyingonmanual experi-mentationwithdifferentdesignoptions,andmaystillbedifficult tofulfilthecompetingrequirementsonthesystem—particularly asthetimeandeffortinvolvedmeansthattypicallyonlyasmall numberofpotentialdesignoptionscanbeinvestigatedinthisway. In suchsituations, automatic architectural optimisation can potentiallybeapplied.Automaticoptimisationallowsamuchmore efficientsearchofthedesignspace(thetotalsetofpossibledesign variations),coveringamuchgreaternumberofalternativesthan couldbeconsideredmanually.However,tobeeffective,the opti-misationmustbeguidedinsomeway,whichrequiressomeformof heuristicevaluation.ItisherethattheuseofADLssuchasEAST-ADL forrepresentingthedesignmodelpaysdividends,becausesucha modelcontainsalloftheinformationnecessaryforanalysistotake placewithrespecttoeachsystemattributebeingconsidered.For example,iftheobjectivesoftheoptimisationweretomaximise safetyandperformancewhileminimisingcostandunavailability, ithastobepossibletoevaluateeachofthecandidatedesignsbeing exploredaccordingtothosefourcharacteristicsbymeansofsome formofanalysis.Bymakingchangestothedesignmodel automat-icallyaspartoftheoptimisationprocessandallowingtheanalysis toolstoaccessthesamecommonmodel,itthenbecomespossible toevaluatethenewvariantdirectlyandseamlessly,facilitatinga rapid,efficientsearchofthedesignspace.
3.1. Multi-objectiveoptimisation
Taken together,the problemof optimising a largepotential designspace toobtainoneor moregoodsolutions thatfeature a desirable balance of attributes is known as a multi-objective optimisationproblem.Thereareavarietyofdifferentautomated algorithmsthatcanbeemployedtosolvesuchproblems,butin generalthey all aimto quickly findviable solutions (i.e.,valid design variants inthis case) that offeroptimalor near-optimal attributeswithoutneedingtoinvestigateallpossibledesigns.It shouldbenotedthatinamulti-objectiveoptimisationproblem, thereisnottypicallyasingleoptimumsolution,becausethe dif-ferentobjectivesmaybemutuallyexclusive;instead,thegoalis oftentoproduceasetof‘optimal’solutionsthatfeaturearangeof attributesthatbalancethedifferentobjectivesindifferentways—in otherwords,eachprovidingadifferenttradeoffbetweenthe objec-tiveswhilststillmeetinganyconstraints.
TheseareknownastheParetosolutionsandarebasedonthe conceptofdominance.Adominantsolutionisonethatis better inatleastoneobjectivethaneveryothersolutionyetfound,and noworseintheotherobjectives.Thesetofdominantsolutionsis knownastheParetoset.Whenplottedonthegraph,theytendto formacurveknownastheParetofrontier,whichshowsthe cur-rentprogressoftheoptimisation;newsolutionsbeyondthePareto frontierarenewoptimalsolutionsandwilldominateolder solu-tions, whereassolutions withinthefrontier aredominated and non-optimal.Thisis shown inFig. 5,where theParetofrontier consistsofthesolutionsmarkedasblackdots,whilstdominated solutionsarewhitedots.
InFig.5,solutionsareshownasdotsplottedagainsttwoaxes, eachrepresentingdifferentobjectiveattributes(e.g. unavailabil-ityandcost).Inthiscase,thegoalistominimiseeachattribute, solower values are better.Thus A dominates Bbecause it has lowervaluesforeachattribute;itisbetterinbothrespects.Aalso dominatesC,becausealthoughtheyhavethesamevalueforone objective(e.g.unavailability),Ahasalowervaluefortheother(e.g. itischeaper).ConverselyDisanon-dominatedsolutionbecauseit isbetterthanAinoneobjectivebutworseinanother;forexample, Dmaybecheapbutnotveryreliable,whereasAismorereliable butalsomoreexpensive—bothareequallyvalidsolutions.
Fig.5.Paretofrontier.
Althoughthere are manydifferentmulti-objective optimisa-tionalgorithms,e.g.tabusearch(Kulturel-Konaketal.,2003),ant colonies(LiangandSmith,2004), andsimulatedannealing(Kim etal.,2004),oneofthemostprominentapproachesistheuseof geneticalgorithms.Thegeneralprincipleswillbebrieflydiscussed next.
3.1.1. Geneticalgorithms(GAs)
Geneticalgorithmsareoptimisationalgorithmsinspiredbythe evolutionaryprocessesfoundinnature.Theyhavebeenidentified asaparticularlyeffectivemethodforsolvingcombinatorial optimi-sationproblems(suchasthosediscussedhere)andtheyarecapable ofnavigatinglarge,complexsearchspaces(CoitandSmith,1996a).
Thegeneralprocessisasfollows:
• Apopulation(set)ofindividualcandidatesolutionsisrandomly generated.Eachindividualisrepresentedbyadifferentencoding, analogoustohumangenes,whichencapsulatesthewaytheycan varyfromeachother.Theencodingcanbethoughtofasthe‘DNA’ ofeachindividual.
• Geneticoperators—crossoverandmutation—areappliedtothe populationtoobtainanewgenerationofchildsolutions,which are added tothe population(or, in somegeneticalgorithms, becomethesolenewpopulation).Crossoverinvolvesmixingthe genesoftworandomparentcandidatestoproduceachild; muta-tion involvesrandomlychanging thegenes of a candidate to produceanewsolution(oralteranexistingcandidate).
• This process of reproduction continues until the population growstoolarge,atwhichpointthosewiththeleastsuccessful genomesarediscarded.Thisisestablishedbyevaluatingthe solu-tionsinthepopulationaccordingtotheobjectivecriteria(the evaluationfunctionsareknownasfitnessfunctions)and retain-ingthosewiththebestresults—inotherwords,survivalofthe fittest.
• Afterasetnumberofgenerations,theoptimisationceases,and thecurrentpopulationshouldcontainthebest(i.e.,optimal) solu-tionsdiscoveredsofar.
Thenatureoftheproblemdomainandcontexthasalarge influ-enceonthenatureofthegeneticalgorithm,andconsequentlythere are manyversions ofgeneticalgorithms, each ofwhich can be customisedfurtherbymeansofdifferentparameters.Generally, however,theyallsharethesamemajorfeatures:apopulationof individualsrepresentedbysomeformofencoding,crossoverand mutationoperatorstoproducenewindividuals,andsomekindof fitnessfunctiontoevaluatetheindividuals.
Encodings,whichidentifythecharacteristicsoftheindividual solutions,cantakemanydifferentforms.Oneofthesimplestisto useastringofintegers:eachpositionofthestringrepresentsa differentcharacteristic,andthevalueatthatpositiondetermines thenatureofthecharacteristicforthatindividual.Forexample, asimplesystemofthreecomponentsconnectedinseriescould be represented by a string of three integers, and the value of eachintegerindicatestheversionormanufacturerofeachofthe threecomponents.Whilesimple,thistypeofencodingisalsoquite limited,sootherformsofencodingarepossible,suchashierarchical (i.e.,tree-based)encodingswhichmimicthehierarchicalstructure ofthesystemarchitecture.
GAsalsodifferinhowtheyhandlemultipleobjectives(assuming theydoatall).Onecommonapproach istocombinethe differ-entevaluations into a single value byapplying a weightingto eachobjective—ineffect,convertingamultiple-objectiveproblem intoasingle-objectiveproblem.Soforexample,iftheobjectives weresafety, performance, and cost, each would benormalised andweighted—e.g.0.4×safety,0.3×performance,0.3×(inverse ofcost)—andtheresultoftheformulausedasthefitnessforthat individual.However,thisisnotalwaysdesirable(sinceitcanhide usefultradeoffs)andthefitnessweightingscanbeverydifficultto derive.
Anotherapproach isthe penalty-basedGA approach. In this approach,oneobjectiveistreatedasthemainobjectiveand mini-mised(ormaximised)—e.g.cost—andotherobjectivesaretreated asscaled,weightedconstraintsand appliedasa penaltytothe mainobjective.Forexample,amaximumunavailabilitylimitmight beset,andthemorethedesigncandidateexceedsthelimit,the moreharshlythefitnessispenalised.Thuseveniftwosolutions both achieve the same cost, theone that doesnot violate any constraints—orwhichviolatesthembythesmallestdegree—is pre-ferredbythealgorithm.However,becausesuccessfulexploration ofthedesignspaceoftenrequiresinfeasiblesolutions(i.e.,those thatbreaktheconstraints)tobeexploredtoo,adynamicpenalty functioncanbeemployedthatvariesthepenaltyaccordingtothe lengthoftheoptimisationrunsofar(e.g.applyinglightpenalties earlyintheprocess,toencouragemoreexploration,and gradu-allymakingthemheavierastimegoeson).Thisformofdynamic penalty-basedGAhasbeenfoundtohavesuperiorperformance comparedtoeitherstaticversionsorversionsthatonlyallow fea-siblesolutionstobepartofthepopulation(CoitandSmith,1996b). Thereare alsotruemulti-objectiveapproaches thatevaluate againstmultipleobjectivesatonceand maintainaParetofront ofoptimal,non-dominatedsolutions.Thisallowsabroadersetof solutionsandgenerallyresultsinabettercoverageofthesearch space (Salazar et al., 2006), albeit at the cost of higher com-plexity.Thesetypesofalgorithmsaregenerallybettersuitedto multi-objectiveproblemsbecausetheyallowthevarioustradeoffs betweentheobjectivestobebetterrepresented,ratherthanbeing biasedtowardsoneobjectiveandusingtheothersasconstraintsor weightedpenaltiesetc.Therearemanydifferentmulti-objective GAs,including:
• PESA-II(Pareto Envelope-basedSelection Algorithm 2)(Corne etal.,2001),whichseekstomaximiseevenlydistributedspread intheParetosetbyincludingcrowdingintheselectioncriteria; solutionsthatarefoundinlesscrowdedregionsofthesearch spacearepreferredforselectiontoencouragethealgorithmto lookatunder-exploredareasofthesearchspace.
• SPEA-II(StrengthParetoEvolutionaryAlgorithm2)(Zitzleretal., 2001).UnlikePESA-II,whichadoptsa“pureelitist”strategythat allowsnodominatedsolutionstoberetained,SPEA-IIdoeskeep somedominatedsolutions.Theselectioncriteriaarealteredto includeadominancestrength(howmanysolutionsitdominates) andadensityvalue(howcloseanindividualistoothersolutions).
Thusalthoughdominated,crowdedsolutionsarepossible, non-dominated,non-crowdedsolutionsarepreferred.
• NSGA-II (Non-Dominated Sorting Genetic Algorithm 2) (Deb etal., 2002).InNSGA-II, both non-dominated and dominated solutionsarekeptinthesamepopulation,rankedaccordingto dominance(basedonhowmanyothersolutionstheydominate). Moredominatingsolutionsarepreferredduringselection,and crowdingis usedasa tie-breakeriftwo solutionshave equal dominance.
3.1.2. Chosenalgorithm
Aftercomparingthethreealgorithmsabove,thealgorithm cho-senforuseintheATESST2andMAENADprojectsfortheautomatic optimisationofEAST-ADLmodelsisavariantoftheNSGA-IIgenetic algorithm, which wasdeemedto havea good balanceof char-acteristics.NSGA-II is alsoused as thebasis of thePerOpteryx optimisation engine(Koziolek et al., 2011) and is also used in AQOSA(EtemaadiandChaudron,2012).NSGA-IIoffersreasonably goodperformance,widecoverageofthedesignspace,and(most importantly) excellent support for multiple objectives (Parker, 2010).ThealgorithmisnotguaranteedtofindallParetooptimal solutions(thoughnorareanyoftheotheralgorithms,geneticor otherwise),butitshouldstillproduceasetofsuperiorsolutions muchfasterandmoreefficientlythancouldbeperformed manu-ally.
Theencodingusedisaformofhierarchical,tree-basedencoding, whereeachtreenoderepresentsadifferentvariabilitypointforone ormorefunctionsorcomponentsinthesystemarchitecture.Ifan optionalfunctionispresentandalsohasachoiceofsubfunctions (orsubcomponents),thenthenodewillhavecorrespondingchild nodesbeneathitwhichcanalsobevaried.
The different values of the encoding represent all possible variations of the system architecture—in effect, the encoding encapsulatestheentiredesignspace.ItisdefinedinEAST-ADLby meansofthevariabilitymanagementmechanism,allowingmore complexconfigurationsof featurestoberepresented,including dependenciesbetweenfeatures(possiblyhierarchical)and dupli-cationof features.Variabilityis thereforeusedtorepresentthe possibleoptionsforarchitecturalvariationofthedesignbydefining thevariationpointsofthedesignspace;thisnotionofoptimisation spacecorrespondsexactlytowhatiscalledaconfigurationspace infeaturemodellingterminology.Thusforexampleacritical com-ponentcanbedefinedwithseveralimplementationsorperhapsan alternativereplicatedsubsystemspecified(whichprovides addi-tionalredundancy,butincreasescost);theoptimisationalgorithm canthenchooseoneoftheseoptionsandevaluatetheeffectsof thatoptionontheoverallattributesofthesystem.
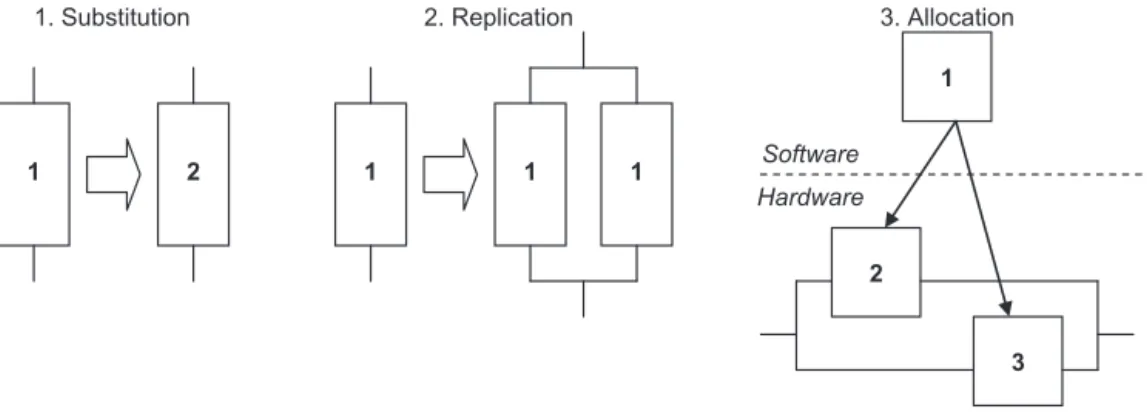
Optimisationvariantscanbedefinedinoneofthreemainways: 1.Substitution: A component/function(or subsystem) is substi-tutedfor another that hasdifferent objective attributes(e.g. safety, cost, performance).A substitute must befunctionally equivalent,i.e.,itmustperformthesametaskandhavea compat-ibleinterface,butneednotachievethetaskinthesamewayor makeuseofallconnections(e.g.anelectronicbrakingsubsystem maybereplacedbyahydraulicversion).Differentsubstitutes areoftentermedasdifferentimplementationsofafunctionor component.
2.Replication:Toimprovereliability,acriticalcomponentormodel elementmaybeduplicatedtoachieveredundancy.Replicants are usually connected in parallel to ensure that a failure of one elementdoesnot leadto afailure of thewhole subsys-tem.Note that thereplicants have tobedefined in advance asoptionalelements;theoptimisationdoesnotgeneratethem itself.
M.Walkeretal./TheJournalofSystemsandSoftware86 (2013) 2467–2487 2477
Fig.6.Differentvariationstrategies.
3.Allocation: In systemswithboth hardware and software ele-ments,theremaybeachoiceofallocationstrategy,e.g.interms ofwhichsoftwarefunctionisallocatedtobeexecutedonwhich hardwareplatform.Thisallowstimingperformanceaswellas reliabilitytobebalancedovertheavailableprocessingresources ofthesystem.
ThesedifferentvariationsareillustratedinFig.6.Furthermore, morecomplexoptimisationispossibleviaacombinationoftwoor moreoftheabove,e.g.replicationthatusesmorethanone imple-mentation.
Duringtheoptimisationprocess,differentvariantscanthenbe chosen fromamongst the predefined choices, and the variabil-itymechanismsensurethattheconnectionsbetweenthechosen componentsarekeptconsistent.Thisenablesrelativelyseamless connectionsbetweendifferentchoicesoffunctions/componentsin themodelandensuresthate.g.failuresarepropagatedcorrectly throughthesystemmodel.
Thisvariability-basedapproachisveryflexibleandallows com-plexcompositionalvariantstobemodelled;forexample,asingle componentmaybesubstitutedforanothercomponentfroma dif-ferentmanufacturer,orreplacedbyareplicatedsubsystemwith heterogeneous subcomponents. This allows more sophisticated designpatterns(suchasvotersandmonitorsetc.)tobeevaluated aspartoftheoptimisation;furthermore,suchconfigurationscan oftenbestoredinalibraryandreusedinothermodels.
3.2. EAST-ADLoptimisationtoolarchitecture
ThissectiondescribestheEAST-ADLoptimisationtool architec-tureascurrentlybeingdevelopedintheMAENADproject.Thetool architectureisdesignedtomeldallofthevariousanalysisand opti-misationtoolsrequired,usingtheEAST-ADLsystemmodelasthe glue.Aprototypeoptimisationenvironmenthasbeendeveloped basedontheEPMtool(basedontheEclipseframework),which currentlyimplementsacoresubsetofEAST-ADL(Abeleetal.,2012). Therearethreemaingoalstobefulfilledbythetoolarchitecture: • Designspacedefinition:Inorderforoptimisationtotakeplace,it mustbepossibletodefinethedesignspacebymeansofspecifying variabilitypointsinthemodelthattheoptimisationcanlater chooseandevaluate.Thisisprimarilyachievedthroughtheuse ofEAST-ADL’svariabilitymanagementmechanism,whichallows alternativeimplementationsandallocationstobespecified.In thetoolarchitecture,thisroleisfulfilledbytheEPMtool. • Rapidobjectiveevaluation:Foroptimisationtobeguidedrather
than random, it must be possible to evaluate new solutions todeterminewhethertheyarebetterorworsethan previous solutions. In a multi-objective problem, this means analysing thesolutions(intheformofdesigncandidates)foreachofthe
objectivesbeingevaluated.Inthiscase,HiP-HOPSistheprimary tooltoevaluatesafetyandreliabilitycharacteristics,cost (cur-rentlyonlyasimplisticsummation)ishandledbyadedicated plugin, and timing analysis capabilities are provided by the MASTtool. Otherpluginscanbeaddedasneededtoevaluate otherobjectives.
• Efficientdesignspaceexploration:Finally,optimisationrequires that thedesign spacebeexploredby meansof analgorithm. Inthiscase,avariantontheNSGA-IIgeneticalgorithmisused, based onprototypeoptimisationtechnologyin HiP-HOPSbut implemented as anEPM plugininstead. In combination with thedesign spacedefinitionandanalysiscapabilities, itallows automaticoptimisationofanEAST-ADLarchitecture.
Anadditionalcrucialstepisvariabilityresolution.Inorderfora designvarianttobeanalysedandevaluated,thevariabilityfirsthas tobe‘resolved’,i.e.,toproduceamodelinwhichallofthe variabil-itypointshavebeenselectedordeselectedtoproduceaparticular systemconfigurationwithaconcretesetofobjectiveattributes.
Therearestillcertainissuesandconstraintstobedealtwith. For example,EAST-ADLdoesnotrequireaone-to-one mapping betweenitsnominaland errormodelarchitectures, i.e.,it does notordinarilyrequirethateachfunctionhasacorrespondingerror model type;however,for theerrormodel tobeevaluated cor-rectlywhenthenominalarchitecturechanges, theoptimisation requiresaone-to-onemappingtobeapplied.Thisisresolvedby explicitlydefiningtheErrorModelforeachnominalmodelvariant. Furthermore,itisveryimportantthattheoptimisation variabil-ityensuressubstitutability,i.e.,thatiftheoptimisationalgorithm selectsadifferentoption,theresultingsystemdesignremainsvalid andsensible.Thisimposestworequirementsonthevariants:that theyshareacompatibleinterface(i.e.,theyshareatleastacommon subsetofportsandconnections)andthattheyperformequivalent functions.Otherwise,theoptimisationalgorithmmayselecta dif-ferentoptionthatleadstoaninvalidornonsensicalsystemdesign. Thisisnotnecessarilyasimpleproblem,especiallyinanADLsuch asEAST-ADL,wheretheerrormodel,software,andhardwaremay allberepresentedinseparatemodelviewsandachangeinonemay needtobereflectedintheothers.Atthesametime,thisisacriterion forvalidityofthemodelregardlessofcontext:itisnotonly optimi-sationwhichrequiresthatavalidtimingmodel(orerrormodelor anyothermodel)mustemergetogetherwiththecorearchitecture asaresultofchangestothevariability;thisisageneralissueinany variabilityresolutionprocess.
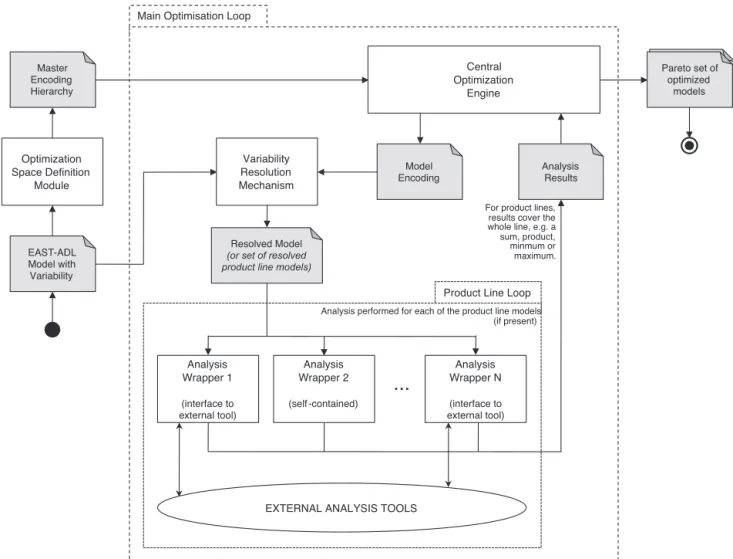
ThetoolarchitectureitselfisshowninFig.7.Thisdiagramshows theflowofoperationsintheoptimisationprocess.Theinitial EAST-ADLmodel(withvariability)ispassedtotheOptimisationSpace DefinitionModule(orOSDM),whichgeneratesaMasterEncoding Hierarchy.ThisdefinesthesearchspacefortheCentral Optimisa-tionEngine,whichgeneratesdifferentmodelencodingsthatare
Main Optimisation Loop
Product Line Loop
Analysis Wrapper 1
(interface to external tool)
...
EXTERNAL ANALYSIS TOOLS Analysis Wrapper 2 (self-contained) Analysis Wrapper N (interface to external tool) Variability Resolution Mechanism Central Optimization Engine Optimization Space Definition Module EAST-ADL Model with Variability Master Encoding Hierarchy Model Encoding Resolved Model (or set of resolved product line models)
Analysis Results
Pareto set of optimized
models
Analysis performed for each of the product line models (if present) For product lines,
results cover the whole line, e.g. a sum, product, minmum or maximum.
Fig.7.EAST-ADLoptimisationtoolarchitecture.
passedto theVariability Resolution Mechanism to beresolved intoanalysablemodels.Theanalysiswrappersthenevaluatethese modelsaccordingtodifferentobjectivesand returntheresults. EventuallytheoptimisationsettlesonasetofParetooptimal solu-tions,whichconstitutethefinalresultsoftheprocess.Thereisalso afurtherplannedprocessinvolvingproductlineoptimisation(see Section3.2.5),althoughthisisnotincludedinthecurrent proto-type.
Themajorelementsofthearchitecturewillbedescribednext. 3.2.1. OptimisationSpaceDefinitionModule(OSDM)
TheOSDMprovidestheinputfortheoveralloptimisation pro-cessbytakingtheoriginal“variant-rich”EAST-ADLmodel,which containsvariabilityelementstodefinethevariationpointsofthe design,andderivesfromthisinputthesetofpossibleencodings oftheoptimisationsearchspace—theMasterEncodingHierarchy. Thisisastructurethatcanbemanipulatedtoobtainthesetofall validdesigncandidates.TheMasterEncodingHierarchyallowsthe CentralOptimisationEnginetoexplorethedesignspace automat-icallybyusinganabstractstructurewithouttheneedforsemantic knowledgeoftheEAST-ADLdesignmodelitself.Thisis“abstract” inthesensethatitdoesnotincludeanyinformationonthe struc-ture,behaviourorotherpropertiesoftheindividualcandidates;it justprovidesameanstounambiguouslyidentifyeachcandidate. Ittakestheformofatree-basedhierarchicalstructure(basedon anormal variabilityfeaturemodel)in whicheach nodedefines anindividualvariabilityandthenatureofthenodedescribesthe typeofvariability.InEAST-ADL,thecoretechnicalfeaturemodel
onvehiclelevelprovidessuchanabstractviewofthecomplete system’svariability,asdetailedinSection2.2,andcanthereforebe usedasisforthispurpose.
TheOSDMisthereforenecessarytoensurethattheoptimisation engineitselfdoesnotneedtoknowanythingaboutthesemantics ofthemodelsitdealswithotherthanwhatvariabilityispresent intheoriginalmodelandhowit canbeencoded. Itisthenthe joboftheVRMtoconvertaparticularencoding—i.e.,aparticular configurationofthevariabilityinthemodel—intoanewmodelin whichallthevariabilityisresolved.Thiscanthenbeanalysedby theexternaltools,andtheoptimisationenginethendetermines whethertokeepordiscardthatparticulardesigncandidateonthe basisofthoseanalysisresults.
Unliketheotherelements,whichareusedineachoptimisation iteration,theOSDMisonlyrequiredonce,atthebeginningofthe optimisation,notiterativelyineachoptimisationcycleaswiththe otherelements.
3.2.2. CentralOptimisationEngine(COE)
TheCentralOptimisationEngineisthedriveroftheoptimisation process,responsibleforexploringthedesignspace(bychoosing whichencodingstoevaluate)andforcollectingthebestsolutionsso far.TheCOEwillusegeneticalgorithmsbasedonestablished HiP-HOPStechnology(Papadopoulosetal.,2011),butisimplemented asaseparateplugintofacilitateeasiercommunicationwiththe otherelementsofthetoolarchitecture.
Whenoptimisationisinitiated,theoptimisationenginereceives threethings:asetofoptimisationparameters(suchasthenumber