REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université Constantine 1 Faculté des Sciences exactes Département de Mathématiques
N
0d’ordre : 20/DS/2014
N
0de série : 01/Mat/2014
THESE
En vue de l’obtention du diplôme de
DOCTORAT EN SCIENCES
Option
Analyse et observabilité des Systèmes
Thème
Observabilité régionale du gradient des
systèmes hyperboliques
Présentée par
Soraya REKKAB épouse BOUHOUHOU
Devant le jury composé dePrésident: S. DJEZZAR Prof., Université Constantine 1. Directeur de Thèse: S. BENHADID M.C.A., Université Constantine 1.
Examinateurs: A. AYADI Prof., Université Oum El Bouaghi.
N . HAMRI Prof., Centre Universitaire de Mila. F. BENTALHA Prof., Université de Batna.
N. AIB M.C.A., Université Constantine 1.
Dédicaces
A ma très chère mère,
à mon cher mari,
Remerciements
En préambule à ce mémoire, je souhaite adresser mes remerciements les plus sincères aux personnes qui ont contribué de loin ou de près à l’élaboration de ce travail.
Je tiens d’abord à remercier mon directeur de recherche, Monsieur Samir BENHADID, pour la confiance qu’il m’a accordée, pour son aide, sa disponibilité, sa compréhension et son soutient constant. Ses qualités scientifiques et surtout humaines ont grandement facilité la réalisation de ce travail.
Que Monsieur le Professeur El Hassan ZERRIK directeur du groupe M.A.C.S (Modélisation, Analyse et Contrôle des Systèmes) à la faculté des sciences exactes de l’université de Moulay Ismail, Meknes, Maroc, trouve ici l’expression de notre gratitude pour nous avoir accueillis dans son équipe et avoir apporté toujours une aide compétente chaque fois que nous en avons eu besoin. Toujours disponible, il nous a fait profiter de son expérience et ses connaissances scientifiques.
Je ne saurais oublier d’exprimer ma très profonde reconnaissance à mon professeur Monsieur Abdelhamid AYADI d’être le premier à m’accueillir dans le monde de la recherche scientifique. Je le remercie également pour l’honneur qu’il me fait en acceptant de siéger à mon jury.
Mes vifs remerciements vont également à mon professeur Salah DJEZZAR pour avoir accepté de présider le jury de soutenance, ainsi qu’aux honorables membres du jury, les professeurs, Nasseredine HAMRI, Fadhila BENTALHA et Nadia AIB, pour l’intérêt particulier qu’ils ont porté à mon travail en acceptant d’examiner mon travail et de l’enrichir par leurs propositions.
i
Introduction………..….…..1
Chapitre 1 : Outils mathématiques et rappel sur l’observabilité régionale 1 Outils mathématiques……….……….…….6
1.1 Problème hyperbolique……….……....…..6
1.2 Cas particulier : cas d’ordre 2………..…..7
1.3 Exemples………....7 1.4 Formule de green………..8 1.5 Relèvement harmonique……….………..10 1.6 Semi-groupe………...11 2 Capteur et observabilité……….12 2.1 Notion de capteur………...12 2.2 Système considéré………..12 3 Observabilité régionale………..……….14 3.1 Intérêts………...15
3.2 Capteur régionalement stratégique………...…16
Chapitre 2 : Concept de l’observabilité régionale du gradient d’un système hyperbolique 1 Observabilité régionale du gradient………...18
1.1 Système et position du problème………..…..18
1.2 Caractérisations……….…24
2 Capteur gradient stratégiques………...30
3 Reconstruction régionale du gradient ……….………33
4 Approche numérique……….……...39
5 Simulations………....46
5.1 Relation : aire de la région cible-erreur d’estimation……….……...49
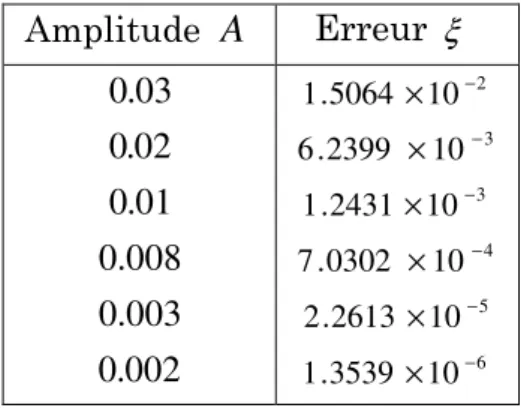
5.2 Relation : amplitude-erreur d’estimation……….………49
Chapitre 3 : Concept de l’observabilité frontière du gradient d’un système hyperbolique 1 Observabilité régionale frontière du gradient……….………..50
1.1 Position du problème ………..……..50
1.2 Définitions et caractérisations……….……...53
2 Capteurs frontières gradient stratégiques………...59
2.1 Définition et caractérisation……….……...59
2.2 Applications ……….………...61
ii Table des matières
2.2.2 Capteur zone interne……….………65
2.2.3 Tableau récapitulatif……….………67
3 Reconstruction frontière du gradient……….……….68
3.1 Approche de l’observabilité frontière du gradient………….………….…68
3.2 Approche HUM……….…..71
4 Simulations ……….…….73
4.1 Relation aire de la région-erreur d’estimation du gradient………..76
4.2 Relation amplitude-erreur d’estimation du gradient……….………76
Conclusion……….…………....78
1
Lors de la première révolution industrielle, la science a joué un rôle limité. A partir des années 50, la nouvelle révolution industrielle a été liée au progrès de la science. C’est le début de la théorie des systèmes.
La théorie des systèmes peut être définie brièvement comme un ensemble de techniques de raisonnement et d’outils mathématiques au service d’un système, en vue à la fois d’une meilleure compréhension de son fonctionnement et de prises de décision.
Mais alors qu’est-ce qu’un système ? Un système peut être défini d’un point de vue réel ou d’un point de vue abstrait. . Le point de vue réel concerne le système physique, concret. C’est un ensemble d’objets ou d’entités connectés et interagissant les uns avec les autres en fonction d’un objectif. Qu’il s’agisse de procédé industriel, de climatologie, d’économie, de corps humain, de population, etc. on peut parler de système. D’un point de vue abstrait, le système est assimilé à une maquette virtuelle, matérialisée par des symboles et des équations, qui a pour qualité de représenter et de décrire au mieux le comportement et l’évolution du système dit réel.
Depuis la fin des années 60, l’étude des systèmes a été considérée à partir d’une représentation dite interne. Les systèmes ne sont plus considérés comme des boites noires avec des actions et des mesures. On défini un vecteur de variables pertinentes inhérentes au fonctionnement intime du système. Toute étude est alors calée sur ces variables, dites d’état. Le système est alors modélisé par une équation d’état.
Depuis le début des années 70, l’activité sur la représentation d’état par les systèmes dynamiques linéaire a connu un grand développement. On a d’abord élucidé de nombreux problèmes dits localisés (ne faisant pas apparaitre de variable d’espace) (H. Kwakernaak et R. Sivan). Puis on s’est attaqué aux problèmes dits distribués (ou à paramètres répartis). L’exploration de ces systèmes s’est alors faite dans trois directions.
Modélisation Analyse Contrôle
La première consiste à représenter le phénomène à étudier par des systèmes d’équations mathématiques prenant en compte toutes les données connues qui le concernent. La deuxième consiste à explorer certains concepts qui aident à la compréhension de ses systèmes et de leur fonctionnement. C’est l’analyse des
2 Introduction
systèmes. Il s’agit des concepts de contrôlabilité, d’observabilité, d’étalabilité, etc. Enfin la troisième direction est centrée sur les problèmes de contrôle et de dimensionnement.
En analyse des systèmes, il existe une activité importante. Nous nous sommes intéressés à l’analyse des systèmes distribués.
La formulation de la plupart des phénomènes (mécaniques, biologiques ou économiques) en systèmes distribués présente l’avantage de les décrire avec précision et permet de conserver à chaque paramètre du modèle sa signification physique.
Beaucoup de travaux sont consacrés à ce domaine, ce qui a donné lieu à une littérature riche et vaste. Citons pour mémoire, les travaux de Balakrishnan [2], Curtain [9], Delfour [10], Fattorini [17], Pritchard [22], Russel [24, 25, 26], Trigiani [28], Zwart [39] etc.
Les systèmes distribués ou à paramètres répartis évoluent en fonction de la variable de temps et d’une variable d’espace indépendante.
De plus, les interactions entre le système et son environnement se font par l’intermédiaire d’actions ou de mesures qui ont un sens pour l’ingénieur et qui surtout, ont une certaine existence spatiale. Cette existence spatiale peut être définie mathématiquement et donner lieu aux notions de capteurs et actionneurs. Par exemple, dans le cas d’un four de diffusion, les capteurs sont les thermocouples et les actionneurs sont les bruleurs.
Il a été possible de lier l’étude de divers concepts d’analyse des systèmes à la structure et à la localisation des capteurs et des actionneurs. Ainsi on peut établir des relations entre contrôlabilité et actionneurs d’une part et d’autre part entre l’observabilité et capteurs. Pour plus de détails voir El Jai-Pritchard [12, 13, 14] et El Jai-Amouroux [11].
Mathématiquement, ces systèmes peuvent être décrits par des équations aux dérivées partielles (E.D.P). Citons comme exemples l’équation de la chaleur qui régit un système de nature parabolique, et l’équation des ondes qui régit un système de nature hyperbolique et qui intervient dans différents domaines tels l’analyse de structures flexibles liées aux satellites artificiels, la modélisation de l’acoustique des salles, etc.
Pour mieux comprendre la réalité du phénomène, pour rester proche de l’automaticien et surtout pour répondre aux préoccupations de l’industrie et aux besoins de l’ingénieur, il a fallu prendre en compte la structure du domaine géométrique définissant le système. Ainsi, les différents travaux sur ces systèmes sont basés sur une formulation mathématique rigoureuse faisant apparaitre des
espaces fonctionnels abstraits qui tiennent compte de la géométrie globale du système.
Or en pratique, de nombreux problèmes physiques ou de l’environnement ne peuvent être formulés que dans un conteste régional. Citons le problème de détection de la région de fuite dans une canalisation, source de chaleur ou de pollution qui concerne le problème de purification de l’eau d’une rivière où la question est naturellement d’atteindre un degré de pollution minimum dans une région donnée. Dans tous ces problèmes on s’intéresse à la connaissance des informations sur un système uniquement dans une région donnée. C’est le problème de l’observabilité régionale.
Si on considère un système
( )
S évoluant sur un domaineΩ
, et observé par un capteur localisé sur une région D⊂Ω, avec la répartition des mesures f . Pour une régionω
⊂Ω.Région cible Zone de mesure
ω
D
Domainegéométrique
Ω
Le problème de l’observabilité régionale consiste à reconstruire la condition initiale y0 du système sur la région ω . Cette notion est étroitement liée aux systèmes distribués et n’a de sens que si le système fait apparaitre une variable spatiale.
Ce concept a rendu possible l’analyse d’un système sur des régions privilégiées internes du domaine d’évolution. Mais un certain nombre de problèmes réels ciblent des régions situées sur la frontière du domaine, plus précisément à l’observabilité régionale, au cas où ω est une partie de la frontière. Cette notion est motivée par plusieurs exemples réels [6].
Le concept d’analyse régionale des systèmes distribués a été introduit dans les années 90 par les professeurs El Jai et Zerrik où les notions de contrôlabilité et d’observabilité ont été étudiées uniquement sur une régionω du domaine
Ω
sur lequel est défini le système. Cette question a été étudiée dans le cas régional interne des systèmes paraboliques en 1993, 1995 voir [15, 30], puis dans le cas régional frontière des systèmes paraboliques en 2002, 2003 voir [33, 34, 38] et4 Introduction
dans le cas régional interne et régional frontière des systèmes hyperboliques en 2007, 2010 voir [36, 37].
Un problème important qui complète l’analyse régionale est l’analyse régionale du gradient. Par exemple le problème de l’observabilité régionale interne (resp. frontière) du gradient consiste à savoir s’il est possible à l’aide des mesures sur le système, de reconstruire le gradient de l’état initial du système sur une région donnée de mesure non nulle ω du domaine géométrique
Ω
(resp. sur une partieΓ de la frontière ∂Ω du domaine
Ω
).L’analyse régionale du gradient est motivée par de nombreux problèmes réels. Citons par exemple le problème de la détermination des échanges thermiques entre un jet de plasma et une cible plane perpendiculaire à l’écoulement.
Le dispositif expérimental schématisé sur la figure ci-dessous comprend une torche (1) à arc soufflé d’argon. Le jet de plasma se développe dans l’aire perpendiculairement à une cible plane composée d’une sonde centrale cylindrique (2) en acier, noyée dans un isolant (3). Deux thermocouples permettent de suivre l’évolution de la température sur l’axe du barreau aux distances respectives
b
1et2
b
par rapport à la surface.(3) (1)
b
1b
2
Γ
(2)A partir des mesures internes à la cible effectuées par deux thermocouples, on veut estimer la température à la surface Γ et le flux absorbé par la cible.
Ce concept a été étudié dans le cas régional interne et frontière des systèmes paraboliques en 2000, 2002, 2003 voir [7, 31, 32, 35].
Nous nous sommes intéressés dans ce travail essentiellement à l’étude du problème de l’observabilité régionale interne et frontière du gradient de l’état initial des systèmes hyperboliques.
Le premier chapitre rappelle l’essentiel des notions de l’observabilité, de capteur et de l’observabilité régionale interne des systèmes décrits par des équations aux
dérivées partielles hyperboliques. On donne des définitions et des caractérisations ainsi que la notion d’un capteur régionalement stratégique. Dans le deuxième chapitre, on introduit le concept de l’observabilité régionale du gradient des systèmes hyperboliques. On donne des définitions et des caractérisations. Ensuite, on introduit la notion de capteur gradient stratégique permettant de faire le lien avec la reconstruction du gradient de l’état initial et de la vitesse initiale. Nous procédons à l’extension de l’approche HUM (Hilbert Uniqueness Method), développée par Lions pour la contrôlabilité globale des systèmes hyperboliques puis par Benhadid pour l’observabilité régionale, pour la reconstruction régionale du gradient. Les résultats obtenus sont illustrés par un exemple et des simulations numériques. Ce chapitre a fait l’objet d’une publication dans ‘’Intelligent Control and Automation’’ [4].
Le troisième chapitre est consacré à l’extension du concept de l’observabilité régionale du gradient de l’état d’un système hyperbolique au cas où la cible est une partie de la frontière du domaine sur lequel le système est défini. Nous donnons une extension de reconstruction donnée au chapitre 2. Ensuite, un résultat important concernant la caractérisation des capteurs régionalement frontière gradient stratégiques et son lien avec la reconstruction frontière du gradient. Cette relation est explicitée sur un exemple bidimensionnel d’un système décrit par des équations hyperboliques en fonction de la structure et la localisation des capteurs. Enfin, une extension de la méthode HUM a permis d’obtenir un algorithme de reconstruction du gradient, illustré par un exemple et simulations.
Ce dernier chapitre a également fait l’objet d’une autre publication dans ‘’International Journal of Management & Information Technology’' [5].
6
Chapitre 1
Outils mathématiques et rappel sur
l’observabilité régionale
Dans ce chapitre, nous présentons quelques problèmes hyperboliques abstraits bien adaptés à la résolution de nombreux problèmes dans les applications. Ensuite, nous rappelons quelques outils mathématiques et conceptuels que nous allons utiliser dans notre travail. Enfin, nous abordons les notions de l’observabilité et l’observabilité sur une partie ω du domaine
Ω
lié au système étudié.1
Outils mathématiques
1.1 Problème hyperbolique
Soit
Ω
un ouvert borné deIR
n de frontière ∂Ω de classe 1C par morceau et T >0 . Nous allons donner quelques problèmes hyperboliques abstraits bien adaptés à la résolution de nombreux problèmes dans les applications. Les espaces souvent utilisés sont 1
( )
Ω0
H , 1
( )
ΩH ,
L
2( )
Ω
. On introduit les hypothèses suivantes:(i) Deux espaces de Hilbert réels V et
H
tels que V ⊂H avec injection continue et V dense dansH
.(ii) Une forme bilinéaire symétrique
(
u,v)
a a(
u,v)
continue sur V×V et vérifiant la condition d’ellipticité: ∃α
>0 etλ
≥0tels que( )
2 2 , ,au v vH vV V v∈ +λ ≥α ∀Soit le problème hyperbolique suivant: étant donné
u
0∈
V
,
u
1∈
H
etf
∈
L
2(
0
,
T
;
H
)
trouver une fonction u∈C0
(
0,T;V)
IC1(
0,T;H)
vérifiant:( )
(
u t v)
a(
u( )
t v)
(
f( )
t v)
dt d V v , 2 , , , 2 = + ∈∀ au sens des distributions sur
] [
0,T( )
0 0,( )
0 u1dt du u
On a le résultat suivant Théorème 1.1
Sous les hypothèses ci-dessus, le problème (1-1) admet une solution unique
(
T V)
C(
T H)
C
u∈ 0 0, ; I 1 0, ; [23].
1.2 Cas particulier: cas d’ordre 2
Avec les mêmes hypothèses sur le domaine
Ω
et sa frontière∂Ω, pour T >0, on note Q=Ω×]
0,T[
et ∑ = ∂Ω×]
0,T[
, on considère( )
( )
( )
( )
Ω = Ω ⊆ ⊆ Ω Ω = . . avec de fermé espace sous 2 1 1 0 1 L H H V H H VOn se donne ensuite des fonctions aij∈L∞
( )
Ω,1≤i, j≤n, et a0∈L∞( )
Ω , telles que:( )
Ω ≥ ∈ ∀ > ∃ ≤ ≤ =∑
= n j i j i j i n i j j i dans p p x a IR n j i a a 1 , 2 , , . . , , , 0 , , 1 , ξ α ξ ξ ξ α (1-2)Soit
A
l’opérateur différentiel elliptique du second ordre donné par:u a x u a x Au n j i j j i i 0 1 , + ∂ ∂ ∂ ∂ − =
∑
=(1-3)
On définit la dérivée conormale de u par:
∑
= ∂ ∂ = ∂ ∂ n j i i j j i A x u a u 1 ,ν
ν
Où ν
( )
x =(
ν1( )
x ,K,νn( )
x)
est le vecteur normal sortant à∂Ω. On a le résultat suivant.Sous les hypothèses (1-2)-(1-3), si
u
0∈
V
,∈
( )
Ω
2 1
L
u
etf
∈
L
2( )
Q
on a :1.3 Exemples
- Problème de Cauchy-Dirichlet. Soit = 1( )
Ω 0 H V , ∈ 1( )
Ω 0 0 H u ,u
1∈
L
2( )
Ω
etf
L
( )
Q
2∈
alors le problème8 Chapitre 1
( )
( )
Ω = ∂ ∂ = Σ = = + ∂ ∂ dans u t u u u sur u Q dans f Au t u 1 0 2 2 0 ., , 0 ., 0admet une solution unique ∈
(
1( )
Ω)
1(
2( )
Ω)
0 0 ; , 0 ; , 0 T H C T L C u I [20, 23]. - Problème de Cauchy-Neumann. Soit
V
=
H
1( )
Ω
, ∈ 1( )
Ω 0 H u ,u
1∈
L
2( )
Ω
etf
L
( )
Q
2∈
alors le problème( )
( )
Ω = ∂ ∂ = Σ = ∂ ∂ = + ∂ ∂ dans u t u u u sur u Q dans f Au t u A 1 0 2 2 0 ., , 0 ., 0ν
admet une solution unique ∈ 0
(
1( )
Ω)
1(
2( )
Ω)
; , 0 ; , 0 T H C T L C u I [20, 23]. - Problème de Cauchy-Dirichlet-Neumann.SoitΓ0 une partie de ∂Ω de mesure superficielle >0, on prend
( )
{
; 0}
0 1 = Ω ∈ = v H v Γ V alors le problème]
[
(
)
]
[
( )
( )
Ω = ∂ ∂ = × Γ Ω ∂ = ∂ ∂ × Γ = = + ∂ ∂ dans u t u u u T sur u T sur u Q dans f Au t u A 1 0 0 0 2 2 0 ., , 0 ., , 0 | 0 , 0 0ν
admet une solution unique ∈ 0
(
0, ; 1( )
Ω)
1(
0, ; 2( )
Ω)
L T C H T C u I [20, 23].1.4 Formule de Green
L’espace de Hilbert 2( )
Ω
L
sera muni du produit scalaire usuel et de sa norme associée. De même pourL
2( )
Q
, on notera( ) ( )
( )
∫
∀ ∈ = Q Q u x t v x t dxdt u v L Q v u, , , , , 2 2 1 , Q Q u u u =- Première formule de Green.
On considère l’operateur
A
donné ci-dessus par (1-2) et (1-3), alors son adjoint * Asera défini de telle sorte que
( ) ( )
( )
( )
* * , , , ,v 2 u Av 2 u D A v D A Au L L Ω = Ω ∀ ∈ ∀ ∈Cette formule s’étend pour
u
,
v
∈
H
2( )
Ω
et constitue la formule de Green pour le cas elliptique [19, 20]: ( ) ( ) ( )( )
Ω ∈ ∀ ∂ ∂ − ∂ ∂ = Ω ∂ Ω ∂ Ω 2 , , , , , 2 2 * 2 v u v H v u v v u v Au L A L A L (1-4)- Deuxième formule de Green.
Soit
H
un espace de Hilbert etH
* son dual, on définit l’espace(
)
(
)
(
)
∈ ∈ = 2 2 * ; , 0 / ; , 0 , 0 L T H dt du H T L u T W .Pour ϕ,ψ∈W
(
0,T)
on a la formule d’intégration par parties:( ) ( )
( )
( )
( ) ( )
( ) ( )
∫
+∫
= − T T t t dt t dt d t dt t t dt d 0 0 0 , 0 , , ,ψ ϕ ψ ϕ ψ ϕ ψ ϕ(1-5)
Où le signe .,. désigne le produit scalaire de
H
. En appliquant (1-4) et (1-5) àl’opérateur + ∂ ∂ A t , on obtient pour
=
( )
Ω
2L
H
: pour tousϕ
,
ψ
∈
H
1(
0
,
T
;
L
2( )
Ω
)
.( ) ( )
( ) ( )
Σ Σ Ω ∂ ∂ − ∂ ∂ + − = + ∂ ∂ − − + ∂ ∂ψ
ϕ
ν
ψ
ν
ϕ
ψ
ϕ
ψ
ϕ
ψ
ϕ
ψ
ϕ
, , 0 , 0 , , , * * A A Q Q T T A t A t10 Chapitre 1 Remarque 1.1 L’operateur + ∂ ∂ − * A t est l’adjoint de
+
∂
∂
A
t
au sens de distributions. On peutaussi procéder de la même manière pour calculer l’adjoint de l’opérateur
hyperbolique + ∂ ∂ A t2 2
ce qui donnera la troisième formule de Green.
1.5 Relèvement harmonique
Ici, on donne la définition du relèvement harmonique qui permet de faire le lien entre un espace de Hilbert défini sur
Ω
et l’espace trace associé.Définition 1.1
On appelle relèvement harmonique, toute application
(
)
( )
( )
g g H H ℜ Ω → Ω ∂ ℜ a 1 2 1 :où ℜ
( )
g est la solution du problème Ω ∂ = Ω = ∆ sur dans 0 g z z (1-6) Théorème 1.2
1. L’application trace d’ordre zéroγ définie sur 0
D
( )
Ω est à valeur dans(
∂Ω)
0
C se prolonge de manière unique en une application linéaire continue (resp. linéaire continue et surjective) de 1
( )
ΩH sur 2
(
∂Ω)
L (resp.
sur 2
(
∂Ω)
1
H ).
2. Il existe un relèvement harmonique ℜlinéaire continu de 2
(
∂Ω)
1 H dans
( )
Ω 1 H tel que (∂Ω) = ℜ 2 1 0 H Id o γ . 3. 1( )
Ω 0H est identique au noyau de γ dans 0 1
( )
ΩH .
4. Si ∈ 2
(
∂Ω)
1
H
g , il existe une fonction unique ℜg ∈H1
( )
Ω solution du problème (1-6).1.6 Semi-groupe
Définition 1.2Une famille d’opérateurs
(
S( )
t)
t≥0bornés définis sur un espace de HilbertX
, est dite semi-groupe fortement continu si1. S
( )
0 = Id . 2. S(
t+ s)
= S( ) ( )
t S s pour tout t,s≥0. 3. S( )
t y− y →0 quand + → 0 t pour tout y∈ X. Définition 1.3On appelle générateur infinitésimal d’un semi-groupe fortement continu
(
S( )
t)
t≥0 , l’opérateurA
défini par lim( )
,0 t y y t S Ay t − = +
→ quand cette limite existe.
Le domaine de définition de l’opérateur
A
est défini par:( )
/lim( )
existe . 0 − ∈ = + → t y y t S X y A D tMaintenant intéressons-nous au problème qui consiste à savoir quelles doit satisfaire un opérateur
A
pour être générateur infinitésimal d’un semi-groupe fortement continu. Précisément, nous avons le théorème de Hille-Yosida suivant [2, 8, 18, 29]:Théorème 1.3
Soit
A
un opérateur linéaire vérifiant les conditions suivantes: (i) D( )
A est dense dansX
.(ii)
A
est fermé.(iii) Il existe
M
etα
réels tels que{
λ ∈IR/λ >α}
⊂ ρA et ∀k=1,2,K(
)
(
)
k k M I A α λ λ − ≤− − où ρAest l’ensemble résolvant de
A
.Alors
A
génère un semi-groupe fortement continu(
S( )
t)
t≥0satisfaisant:( )
t ≤ Me ,t > 0.S αt
Remarque 1.2
L’adjoint de l’operateur
A
noté A*,génère le semi-groupe(
S*( )
t)
t≥0 adjoint de( )
(
S t)
t≥0 qui est fortement continu sur le dual*
12 Chapitre 1
2
Capteur et observabilité
L’analyse des systèmes distribués peut être faite de façon abstraite en considérant divers espaces fonctionnels et opérateurs permettant d’introduire certaines définitions et d’établir certaines caractérisations et propriétés. Cette démarche laisse la variable d’espace assez peu exploitée et l’étude peut avoir un intérêt limité par l’automaticien. Par contre, il est possible d’exploiter judicieusement la variable d’espace en notant que les interactions entre le système et son environnement se font par l’intermédiaire d’actions ou de mesures qui ont un sens pour l’ingénieur et qui, surtout, ont une certaine existence spatiale. Cette existence spatiale peut être définie mathématiquement et donner lieu aux notions d’actionneurs et de capteurs.
2.1 Notion de capteur
Pour contrôler un système, on aura besoin d’un ensemble d’informations qui ne sont pas accessibles aisément et dont l’importance est capitale, d’où la nécessité d’utilisation des capteurs.
Un capteur permet de recueillir des informations sur le système et son évolution. Ces informations sont exprimées par une équation de sortie.
Définition 1.4
Un capteur est défini par un couple
(
D,f)
oùD
est une partie fermée de Ω et représente le support spatial du capteur et f ∈ L2( )
D définit la distribution des mesures surD
.Dépendant de la nature de
D
et f , on peut avoir différents types de capteurs:•
Il peut être ponctuel si D ={ }
b avec b∈Ω et f =δ( )
.,b , oùδ
est la masse de Dirac concentrée dansb.•
Il peut être zone quand D⊂Ω et f ∈ L2( )
D .2.2 Système considéré
L’objet de cette partie est de rappeler la notion de l’observabilité et l’observabilité régionale des systèmes hyperbolique [3].
Soit
Ω
un sous-ensemble ouvert borné de IRn(
n≥1)
de frontière ∂Ω assez régulière. Soit] [
0,T où T>0, l’intervalle de temps. On note Q=Ω×]
0,T[
et]
0,T[
× Ω ∂ =
( )
( )
(
)
( )
(
)
( )
( )
Σ = Ω = ∂ ∂ = = ∂ ∂ 0 , 0 , , 0 , , , 1 0 2 2 t y x y x t y x y x y Q t x y A t x t yξ
(1-7) Les conditions 0
y et y1 sont supposées inconnues et le système (1-7) est augmenté de la fonction de sortie
( )
t Cy( )
x t z = , (1-8) Où( )
q IR L C 2 Ω →: désigne l’opérateur d’observation dépendant de la nature et du nombre
q
de capteurs considérés.Soit
( )
= 1( )
Ω 2( )
Ω0 H
H A
D I le domaine de l’opérateur
A
donné par (1-2)-(1-3) et( )
Ω
×
( )
Ω
=
2 2L
L
X
. On considère l’opérateur = 0 0 A I A où( )
=( )
× 1( )
Ω 0 H A D A D .A
est un opérateur linéaire engendrant un semi groupe fortement continuS( )
tsur
X
. Par ailleurs si(
wmj)
est la base de fonctions propre de l’opérateurA
, pour Dirichlet, etλ les valeurs propres associée, m λ étant de multiplicitém rm, alors pourtout
(
y1, y2)
dansX
on a( )
(
( ) ( ) ( )(
( ))
− + − − − − − + − = Ω ≥ = Ω Ω ≥ = Ω∑∑
∑∑
j m m L j m m r j m L j m m j m m L j m m m r j m L j m w t w y t w y w t w y t w y y y t S m mλ
λ
λ
λ
λ
λ
cos , sin , sin , 1 cos , 2 2 2 2 2 1 1 1 2 1 1 1 2 1 (1-9)Le produit scalaire étant dans 2
( )
ΩL [12]. L’opérateur
A
permet alors de définir le système (1-10) suivant équivalent au système (1-7). Il suffit de considérer:
( )
( )
( )
= < < = 0 0 0 y y T t t y A t y& (1-10)Dont la variable d’état est
( )
( )
( )
∂ ∂ = t t y t y t y , = 1 0 0 y y y et( )
( )
( )
∂ ∂ ∂ ∂ = 2 2 t t y t t y t y&14 Chapitre 1
Le système (1-10) est augmenté de l’équation de sortie
z
( )
t =Cy( )
t (1-11)où on a pris C =
(
C,0)
. Le système (1-10) admet une solution unique donnée par( )
( )
0 y t S t y = (1-12)(1-10) peut s’écrire alors sous la forme
( )
( )
0y t K t
z = où K =CS
( )
. apparait comme un opérateur linéaire borné deX
dans L2(
0,T;IRq)
,K* est l’opérateur adjoint deK
.Définition 1.5
1. Le système (1-7) augmenté de l’équation de sortie (1-8) est dit exactement
observable si
( )
* = 2( )
Ω × 2( )
ΩIm K L L
2. Le système (1-7) augmenté de l’équation de sortie (1-8) est dit faiblement
observable si
( )
* = 2( )
Ω × 2( )
ΩIm K L L
3
Observabilité régionale
Le concept de l’observabilité régionale est l’étude de la possibilité de reconstruire l’état et la vitesse initiaux sur une partie interne du domaine d’évolution du système connaissant la dynamique du système et des mesures effectuées sur un intervalle de temps fini. L’intérêt de ce concept est capital quand on sait qu’il y a des états qui ne peuvent être construits que sur une région du domaine sur lequel le système est défini.
Pour un sous ensemble (une région) non vide ω de Ω de mesure de Lebegue non nulle, on considère les opérateurs
( )
( )
( )
( )
(
)
(
)
ω ω ω ω χ 2 1 2 1 2 2 2 2 , , : y y y y L L L L → × → Ω × Ω Dont l’adjoint * 2( )
× 2( )
→ 2( )
Ω × 2( )
Ω :Lω
Lω
L Lχ
ω est donné par(
)
(
)( )
Ω ∈ ∈ = ω ω χω x x x y y y y 0 , , 2 1 2 1 *Définition 1.6
1. Le système (1-7) augmenté de l’équation de sortie (1-8) est dit exactement régionalement observable ou exactement observable sur ω si
(
χ
ω)
( )
ω
( )
ω
2 2*
Im K =L × L
2. Le système (1-7) augmenté de l’équation de sortie (1-8) est dit faiblement régionalement observable ou faiblement observable sur ω si
(
χ
ω *)
2(
ω
)
2(
ω
)
Im K = L × L
Proposition 1.2
1. Le système (1-7) augmenté de l’équation de sortie (1-8) est exactement observable sur ω si et seulement si
(
)
=(
Ω)
×(
Ω)
+ * * 2 2
Im
ker
χ
ωχ
ωχ
ωK L L2. Le système (1-7) augmenté de l’équation de sortie (1-8) est faiblement observable sur ω si et seulement si
(
)
=(
Ω)
×(
Ω)
+ * * 2 2
Im
ker
χ
ωχ
ωχ
ωK L LPour la démonstration voir [3]. Remarque 1.3
1. Si le système (1-7)-(1-8) est exactement (resp. faiblement) observable, alors il est exactement (resp. faiblement) observable sur ω .
2. Si le système (1-7)-(1-8) est exactement observable sur ω , alors il est
faiblement observable sur ω .
3. Si le système (1-7)-(1-8) est exactement (resp. faiblement) observable sur
1
ω , alors il est exactement (resp. faiblement) observable sur ω2 pour tout
1
2 ω
ω ⊂ .
4. Un système peut être régionalement observable sur ω mais non observable sur tout le domaine
Ω
. Ceci est illustré par un exemple dans [3].3.1 Intérêts
La notion d’observabilité régionale est plus adaptée à l’analyse des systèmes réels. En effet:
16 Chapitre 1
•
Les définitions ci-dessus sont générales est englobent le cas de l’observabilité globale en prenantω
⊂Ω.•
La reconstruction de l’état sera plus précise dans le cas régional. En effet, si0
y désigne l’état à estimer et ~y l’état estimé, si 0 y désigne la vitesse à 1
estimer et ~1
y la vitesse estimée, alors on a :
( )+ − ( )≤ − ( )Ω + − ( )Ω − 0 2 1 1 2 0 0 2 1 1 2 0 ~ ~ ~ ~ L L L L y y y y y y y y ω ω
3.2 Capteur régionalement stratégique
Dans cette section, on se propose de lier l’observabilité régionale avec la structure des capteurs. Considérons le système
( )
( )
( )
( )
( )
( )
(
)
∑ = Ω = ∂ ∂ = = ∂ ∂ 0 , 0 , , 0 , , , 1 0 2 2 t y x y x t y x y x y Q t x y A t x t yζ
Observer par
q
capteurs(
D
i,
f
i)
1≤i≤qqui peuvent être ponctuels ou zone (interne oufrontière). Définition 1.7
1. Un capteur
(
D,f)
est stratégique sur ω si le système observé estfaiblement observable sur ω , un tel capteur sera dit ω -stratégique. 2. Une suite de capteurs
(
D
i,
f
i)
1≤i≤qest dite ω -stratégique s’il existe aumoins un capteur
(
Di0,fi0)
ω-stratégique.On suppose que l’opérateur A admet un ensemble complet de fonctions propres noté
( )
wi orthonormée dans( )
Ω2
L et associées aux valeurs propres λ de i multiplicités ri . Supposons aussi que i
I i
r r
∈
= sup est fini et A à coefficients constants, alors on a le résultat suivant :
Proposition 1.3
La suite de capteurs
(
D
i,
f
i)
1≤i≤qest ω -stratégique alors q≥ et r rang Mm =rm ,∀m≥1(
)
( )
( )
=
zone
cas
le
dans
,
ponctuel
cas
le
dans
2 , i D L j m i i j m j i mw
f
b
w
M
Pour la démonstration voir [3]. Remarque 1.4
La caractérisation des capteurs fait apparaitre une condition sur le nombre minimum de capteurs pouvant assurer la faible observabilité. En effet, cette condition peut être relaxée avec la considération suivante :
Si on suppose que le domaine géométrique
Ω
(de frontière assez régulière) danslequel est représenté le système est connu avec une certaine précision, alors à l’ordre de cette précision près, le choix de q=1 capteur peut suffire pour assurer l’observabilité du système. En fait, moyennant une faible perturbation de la frontière du domaine
Ω
, la multiplicité peut être ramener à rm =1. Ainsi un seul capteur peut assurer la faible observabilité du système [16, 21].18
Chapitre 2
Concept de l’observabilité régionale du
gradient d’un système hyperbolique
Dans ce chapitre, nous abordons une extension de l’observabilité régionale des systèmes hyperboliques. Plus exactement, il s’agit de l’observabilité régionale du gradient, qui consiste à observer le gradient de l’état initial et le gradient de la vitesse initiale sur une région interne ω du domaine géométrique
Ω
sur lequel le système est défini. L’idée principale de l’introduction de ce concept est la possibilité de reconstruire directement le gradient initial sur une partie ω sans avoir besoin de reconstruire ni son état ni sa vitesse. L’introduction de ce concept est motivé par plusieurs raisons attachées aux problèmes réels, citons entre autres le problème de la diffusion de la chaleur à travers une brique.Chaleur
Figure 2.1
Nous nous intéressons à la connaissance du gradient de la température à la rentrée de la brique.
Nous donnons les définitions et les caractérisations de cette notion pour un système hyperbolique.
1
Observabilité régionale du gradient
1.1 Système et position du problème
SoitΩ
un ouvert borné de nIR de frontière ∂Ω assez régulière. Pour T >0, on note Q=Ω×
]
0,T[
et ∑ = ∂Ω×]
0,T[
.on considère le système décrit par l’équation hyperbolique
(
)
(
)
(
)
( )
(
)
( )
(
)
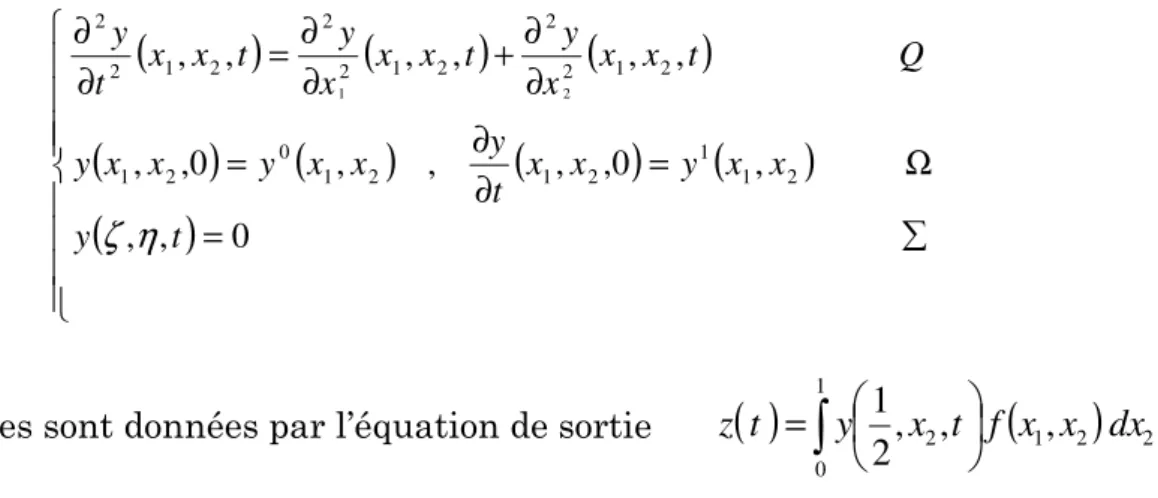
∑ = Ω = ∂ ∂ = = ∂ ∂ 0 , 0 , , 0 , , , 1 0 2 2 t y x y x t y x y x y Q t x y A t x t yζ
(2-1)Où
A
est l’opérateur linéaire défini par (1-2) et vérifiant (1-3).L’équation (2-1) admet une solution unique ∈
(
1( )
Ω)
1(
2( )
Ω)
0 0 ; , 0 ; , 0 T H C T L C y I [20, 23]. L’état initial
(
0 1)
, yy et son gradient sont supposés être inconnus et les mesures sont fournies par l’équation de sortie définie par
z
( )
t =C y(
x,t)
(2-2) Où C H1( )
Ω → IRq0
: est un opérateur linéaire et dépend du type et du nombre de capteurs
q
considérés. Soit( )
( )
( )
∂ ∂ = t t y t y ty et Cy =
(
Cy,0)
, alors le système (2-1) peut être écrit sous la forme( )
( )
( )
Ω = < < = 0 0 0 y y T t t y A t y& (2-3) avec = 0 0 A IA engendre le semi groupeS
( )
t sur l’espace de Hilbert 2( )
Ω × 2( )
Ω L L , donné par( )
(
( ) ( ) ( )(
( ))
− + − − − − − + − = Ω ≥ = Ω Ω ≥ = Ω∑∑
∑∑
j m m L j m m r j m L j m m j m m L j m m m r j m L j m w t w y t w y w t w y t w y y y t S m mλ
λ
λ
λ
λ
λ
cos , sin , sin , 1 cos , 2 2 2 2 2 1 1 1 2 1 1 1 2 1Où
( )
wmj est une base de fonctions propres de l’opérateurA
, orthonormée dans( )
Ω2
L , et λm < 0 les valeurs propres associées de multiplicitérm.
20 Chapitre 2
( )
( )
0y
t
S
t
y
=
On définit alors l’opérateur K:H01
( )
Ω×H01( )
Ω→L2(
0,T;IRq)
par K( )
t =CS( )
t d’où( )
( )
( )
( )
= x y x y t K t z 1 0 . Son adjoint(
)
→( )
Ω× 1( )
Ω 0 1 0 2 * ; , 0 :L TIR H HK q est donné par
K
( ) ( )
t z t S( )
t C z( )
t dt T * 0 * * =∫
En effet, on a(
)
( )Ω× ( )Ω
=
2 2 2 * 2 1 ; , 0 2 1,
,
L L IR T Lz
K
y
y
z
y
y
K
q -(
)
( )
(
q)
q L T IR IR T Lz
y
y
t
S
C
z
y
y
K
; , 0 2 1 ; , 0 2 1 2 2,
,
=
=∫
( )
( )
T IR dt t z y y t S C q 0 2 1 , =( )
( )
( ) ( )∫
Ω× Ω T L L dt t z C y y t S 0 * 2 1 2 2 , =( )
( )
( ) ( )∫
Ω× Ω T L L dt t z C t S y y 0 * * 2 1 2 2 , =( )
( )
( )
( )
∫∫
Ω T dt dx t z C t S x y x y 0 * * 2 1 =( )
( )
( )
( )
∫
∫
Ω dx dt t z C t S x y x y T 0 * * 2 1=
( )
( )
( )Ω × ( )Ω∫
2 2 0 * * 2 1,
L L Tdt
t
z
C
t
S
y
y
d’où le résultat. Soit l’opérateur ∇ H( )
Ω ×H1( )
Ω →(
L2( )
Ω)
n×(
L2( )
Ω)
n 0 1 0 :(
y1,y2)
→ ∇(
y1,y2) (
= ∇y1,∇y2)
où( )
(
( )
)
∂ ∂ ∂ ∂ ∂ ∂ = ∇ → Ω → Ω ∇ n n x y x y x y y y L H , , , : 2 1 2 1 0 KOn note l’opérateur adjoint de ∇ par *
∇ donné par
(
( )
)
(
( )
)
( )
( )
(
)
(
)
(
2)
(
1 2)
* 1 * 2 1 * 2 1 1 0 1 0 2 2 * , , , , : v v y y y y y y H H L L n n = ∇ ∇ = ∇ → Ω × Ω → Ω × Ω ∇Où
(
v1, v2)
est la solution du problème de Dirichlet suivant(
)
(
)
(
( )
( )
)
(
) (
)
Ω ∂ Ω = = = ∆ sur dans 0 , 0 , , , , 2 1 2 1 2 1 2 1 v v y div y div y y div v v En effet, soit(
y y)
∈(
L2( )
Ω)
n×(
L2( )
Ω)
n 2 1, , on a : ∀(
)
∈( )
Ω ×( )
Ω 1 0 1 0 2 1,u H H u(
) (
)
( ( )) ( ( ))(
) (
)
( ) ( ) Ω × Ω Ω × Ω = ∇ ∇ 1 0 1 0 2 2 1 2 1 2 * 2 1 2 1,y , u ,u L L y ,y , u ,u H H y n n D’autre part, on a(
) (
)
( )(
)
(
( ))
∫
(
) (
)
Ω Ω × Ω=
∇
∇
u
u
y
y
u
u
dx
y
y
n n L L 1 2 1 2 2 1 2 1,
,
,
2 2,
,
(
)(
)
∫
Ω∇
∇
=
y
1,
y
2u
1,
u
2dx
∫
∫
Ω Ω∇
+
∇
=
y
1u
1dx
y
2u
2dx
∫∑
∫∑
Ω = Ω = ∂ ∂ + ∂ ∂ = dx x u y dx x u y n i i i n i i i 1 2 2 1 1 122 Chapitre 2
En utilisant la formule de Green, on obtient
(
) (
)
(
( ))
(
( ))
∫∑
∫∑
∫∑
∫∑
Ω ∂ = Ω = Ω ∂ = Ω = Ω × Ω + ∂ ∂ − + ∂ ∂ − = ∇ n i i n i i i n i i n i i i L L dx u y dx u x y dx u y dx u x y u u y y n n 1 2 2 1 2 2 1 1 1 1 1 1 2 1 2 1, , , 2 2 Puisque(
)
∈( )
Ω × 1( )
Ω 0 1 0 2 1,u H H u , on obtient(
) (
)
( ( )) ( ( ))∫∑
∫∑
Ω = Ω = Ω × Ω ∂ ∂ − ∂ ∂ − = ∇ u dx x y dx u x y u u y y n i i i n i i i L L n n 1 2 2 1 1 1 2 1 2 1, , , 2 2( )
∫
( )
∫
Ω Ω − + − = div y1 u1dx div y2 u2dx∫
(
( )
( )
)
Ω − − = dx u u y div y div 2 1 2 1 ,(
)
∫
Ω − = dx u u y y div 2 1 2 1,(
) (
)
(Ω)× (Ω) − = 1, 2 , 1, 2 2 2 L L u u y y div De plus, on a(
) (
)
( ) ( )(
) (
)
dx x u u x y y u u y y i n i i H H ∂ ∂ ∂ ∇ ∂ = ∇∫∑
Ω = Ω × Ω 2 1 1 2 1 * 2 1 2 1 * , , , , , 1 0 1 0En utilisant la formule de Green, on obtient
(
) (
)
( ) ( )(
) (
)
(
)(
)
∫∑
∫∑
Ω ∂ = Ω = Ω × Ω ∂ ∇ ∂ + ∂ ∇ ∂ − = ∇ n i i n i i H H dx u u x y y dx u u x y y u u y y 1 2 1 2 1 * 2 1 1 2 2 1 * 2 2 1 2 1 * , , , , , , , 1 0 1 0∫
(
*(
y1,y2)
)
(
u1,u2)
dx Ω ∇ ∆ − =(
) (
)
( )Ω × ( )Ω ∆ − = v1,v2 , u1,u2 L2 L2 Donc, ∀(
)
∈( )
Ω × 1( )
Ω 0 1 0 2 1,u H H u :(
) (
)
( ) ( )= ∆v1,v2 , u1,u2 L2 Ω ×L2 Ω(
1, 2) (
, 1, 2)
2(Ω)× 2(Ω) L L u u y y divd’où le résultat. Définition 2.1
1. Le système (2-1) augmenté de l’équation de sortie (2-2) est dit exactement gradient observable ou exactement G-observable si
(
∇K *)
=(
L2(
Ω)
)
n ×(
L2(
Ω)
)
n Im2. Le système (2-1) augmenté de l’équation de sortie (2-2) est dit faiblement gradient observable ou faiblement G-observable si
(
∇K *)
=(
L2(
Ω)
)
n ×(
L2(
Ω)
)
n ImPour un sous ensemble non vide ω de
Ω
de mesure de Lebegue non nulle, on considère aussi les opérateurs( )
(
)
(
( )
)
(
( )
)
(
( )
)
(
1 2)
(
1 2)
2 2 2 2 , , : y y y y L L L L n n n n ω ω ωχ
χ
ω
ω
χ
→ × → Ω × Ω où(
( )
)
(
( )
)
ω ω ω χ y y L L n n → → Ω 2 2 : et( )
( )
ω ω ω χ y y L L → → Ω 2 2 : ~Leurs adjoints sont notés par
χ
ω* ,χ
ω* etχ
~ω*respectivement et donnés par(
( )
)
(
( )
)
(
( )
)
(
( )
)
(
)
(
2)
* 1 * 2 1 2 2 2 2 * , , : y y y y L L L L n n n n ω ω ωχ
χ
ω
ω
χ
→ Ω × Ω → × où( )
(
)
(
( )
)
Ω = → Ω → ω ω χ ω χ ω ω dans dans y y y L L n n 0 : * 2 2 * et( )
( )
Ω = → Ω → ω ω χ ω χ ω ω dans dans y y y L L 0 ~ : ~ * 2 2 *L’idée est basée sur l’existence d’un opérateur
(
q)
(
( )
)
n(
( )
)
n L L IR T L2 0, ; 2ω
2ω
: → ×24 Chapitre 2
naturelle du concept d’observabilité du gradient d’un système parabolique déjà introduit dans [7]. Alors, on définit l’opérateur Η=
χ
ω∇K*.Définition 2.2
1. Le système (2-1) augmenté de l’équation de sortie (2-2) est dit exactement régionalement gradient observable ou exactement G-observable sur ω si
( )
(
( )
)
n(
( )
)
n LL2
ω
2ω
Im Η = ×
C'est-à-dire Η surjectif.
2. Le système (2-1) augmenté de l’équation de sortie (2-2) est dit faiblement régionalement gradient observable ou faiblement G-observable sur ω si
( )
(
(
)
)
n(
(
)
)
n L L2ω
2ω
Im Η = × C'est-à-direΗ
* injectif. Remarque 2.1( )
{ }
(
)
(
( )
(
( )
)
n(
( )
)
n)
L L2ω
2ω
* Im 0 ker Η = ⇔ Η = ×1.2 Caractérisations
On peut caractériser la G-observabilité sur ω par les résultats suivants Proposition 2.1
1. Le système (2-1) augmenté de l’équation de sortie (2-2) est exactement G-observable sur ω si l’une des propositions suivantes est vérifiée.
a) Il existec>0, tel que pour tout z* ∈
(
L2(
ω
)
)
n ×(
L2(
ω
)
)
n .( )
(
L)
n(
L( ))
n L(
T IRq)
z
K
c
z
; , 0 * * * * 2 2 2 ω ω ω ×≤
∇
χ
b) +(
∇K*)
=(
L2( )
Ω)
n×(
L2( )
Ω)
n Im kerχω2. Le système (2-1) augmenté de l’équation de sortie (2-2) est faiblement G-observable sur ω si et seulement si l’opérateur Nω = ΗΗ* est positif.
Preuve
1. a) Découle du résultat plus général suivant [27] : si
E
etF
sont deuxespaces de Banach réflexifs, et f ∈L
(
E,F)
alors il y a équivalence entre : i- F⊂Im( )
f ii- * * * * * , , , 0 telque z * f z * z F E F ≤ ∀ ∈ > ∃γ γIl suffit de poser : E=L2
(
0,T;IRq)
, F=(
L2( )
ω
)
n×(
L2( )
ω
)
n, f =Η, puisque (i) est vérifiée du fait que le système est exactement G-observable.b) Soit y∈
(
L2( )
Ω)
n×(
L2( )
Ω)
ndonc χωy
(
L2( )
ω)
n(
L2( )
ω)
n×
∈ , puisque le système
(2-1)-(2-2) est exactement G-observable sur ω, il existe
z
∈
L
2(
0
,
T
;
IR
q)
tel queχ
ωy = Η z =χ
ω∇K*z donc(
)
0 * = ∇ − K z y ωχ
En posant y= y1+ y2 avec y y K*z 1 = − ∇ et y K z * 2 =∇ . Il vienty
1∈
ker
χ
ω et(
*)
2 Im K y ∈ ∇ . - Inversement : Soit y(
L2( )
ω
)
n(
L2( )
ω
)
n × ∈ donc *y∈(
L2( )
Ω)
n×(
L2( )
Ω)
n ω χIl existe alors y1∈kerχω et y2∈ Im
(
∇K*)
tel que
χ
ω* y = y1 + y2 ⇒χ
ωχ
ω*y =χ
ωy1 +χ
ω y2 =χ
ωy2Or
y
2∈
Im K
(
∇
*)
donc il existez
tel queΗ ∈ ⇒ ∇ = ⇒ ∇ = ⇒ ∇ = * * * * Im 2 K z y K z y K z y y χ ωχω χ ω χω
2. Condition nécessaire : Soit z*∈
(
L2( )
ω
)
n×(
L2( )
ω
)
n tel que( ) ( ) ( ( )) 0 , ( ( )) ( ( )) 0 , 2 2 2 2 * * * * * = ⇒ ΗΗ = × × n n n n L L L L z z z z N ω ω ω ω ω ( ) 0 , ; , 0 * * * * 2 = Η Η ⇒ q IR T L z z (0, ; ) 0 * * 2 = Η ⇒ q IR T L z


![Tableau 3.2: Relation entre l’erreur de reconstruction du gradient et l’aire de la région ω Subregion ω Erreur ξ ] 0](https://thumb-eu.123doks.com/thumbv2/123doknet/14442178.709409/81.892.327.569.422.648/tableau-relation-erreur-reconstruction-gradient-région-subregion-erreur.webp)