Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université Mohammed Seddik Benyahia – Jijel
Faculté des Sciences et de la Technologie
Département d’Automatique
Mémoire de fin d’étude pour l’obtention du diplôme
Master en Automatique
Option : Automatique et Systèmes
Thème :
Année Universitaire 2018/2019
Commande par Backstepping adaptative
d’un système de suspension active avec
saturation à l’entrée.
Réalisés par :
❖
Benmiçia Abderrahime
❖
Houas Omar
Encadrée par :
❖
Zibra Aicha
Remerciements
Tout d’abord, nous tenons à remercier Allah, le clément et le
miséricordieux de nous avoir donné la force, le courage et la
patience pour mener à bien ce travail.
Nous voudrions aussi exprimer nos vifs remerciements à
notre encadreuse Dr.
Zibra Aicha
pour sa sollicitude, disponibilité et ces
précieux conseils.
Nous voudrions remercier tous les enseignants de département
automatique qui ont contribué à notre formation.
Nos remerciements vont également à tous ceux et celles qui, de près
ou de loin, nous ont apporté aide et encouragement.
Dédicace
Je dédie ce modeste travail : A mes très chers parents que dieu les
garde et les Protège pour leurs soutien moral et financier, pour
leurs encouragements et les sacrifices qu’ils ont endurés.
A mes sœurs
A tous mes camarades d’étude de la promotion et surtout à
Bassem.
A tous ce que j’aime et qui m’aiment.
Dédicace
Je dédie ce modeste travail : A ma chère mère, que dieu la garde
et la Protège pour son soutien moral et encouragements et les
sacrifices qu’elle a endurés.
À la mémoire de mon père qui en aurait été, j’en suis
convaincue, très fière
A mes frères et ma chère sœur
A tous mes camarades d’étude de la promotion et surtout à
Bassem.
A tous ce que j’aime et qui m’aiment
Table des Matières
Introduction générale………..1
Chapitre I : Généralité sur la suspension. I.1 Introduction ... 4
I.2 Eléments de la suspension ... 4
I.2.1 Ressort hélicoïdal ... 4
I.2.2 Amortisseurs ... 5
I.2.3 Barre stabilisatrice ... 5
I.2.4 Bras articulés ... 6
I.2.5 Le pneu... 6
I.3 Rôle de la suspension ... 7
I.4 Critère d'évaluation de la performance de la suspension du véhicule ... 7
I.4.1 Le Confort ... 7
I.4.2 La tenue de route ... 7
I.5 Architecture des suspensions courantes ... 8
I.5.1 Le Macpherson... 8
I.5.2 La double triangulation ... 9
I.5.3 Multi bras ... 10
I.6 Types de suspension ... 10
I.6.1 Suspension passive... 10
I.6.2 Suspension semi-active ... 11
I.6.3 La suspension active ... 12
I.7 Conclusion………..13
Chapitre II : Modélisation d’un système de suspension actif. II.1 Introduction ... 14
II.2 Les différents mouvements du véhicule ... 14
II.3 Modélisations de la suspension des véhicules ... 15
II.3.1 Modèle d’un quart de véhicule ... 15
II.3.1.2 cas non linéaire ... 18
II.3.2 Modèle d’un demi-véhicule ... 18
II.4 Simulation en boucle ouverte ... 21
II.5 Conclusion ... 25
Chapitre III : Commande backstepping adaptative. III.1 Introduction ... 26
III.2 Systèmes non linéaires ... 26
III.3 Propriétés des systèmes non linéaires ... 26
III.4 Commande Backstepping ... 27
III.4.1 Principe... 27
III.4.2 Méthodes de Lyapunov ... 28
III.4.3 Méthode générale de synthèse par Backstepping ... 28
III.5 La commande Backstepping adaptative ... 31
III.5.1 L’approche adaptative ... 32
III.6 Commande par backstepping adaptative d’un demi-véhicule ... 37
III.6.1 Critères de performance pour le demi-véhicule ... 37
III.6.2 Position du problème ... 37
III.6.3 synthèses de la commande………..38
III.6.4 stabilités de la dynamique des zéros………...41
III.6.5 Résultats de simulation………..42
III.7 Conclusion ... 45
Chapitre III : Commande backstepping adaptative avec saturation à l’entrée. IV.1 Introduction ... 46
IV.2 Saturations ... 46
IV.3 Commande par backstepping adaptative avec saturation d’une suspension active..47
IV.3.1 Position du problème ... 47
IV.3.2 Synthèse de la commande ... 48
IV.3.3 Teste de Simulation ... 52
IV.4 Conclusion ... 56
Table des figures
Figure I.1. Exemples des ressorts hélicoïdaux... 4
Figure I.2. Amortisseur hydraulique ... 5
Figure I.3. Barre stabilisatrice. ... 6
Figure I.4. Bras articulés. ... 6
Figure I.5. Illustration des angles de carrossage (a) et de dérive (b). ... 8
Figure I.6. Schéma cinématique en perspective d'une suspension de type Macpherson. ... 9
Figure I.7. Un train avant a double triangulation (Audi R8). ... 9
Figure I.8. Un train avant à architecture "multi bras" utilisé sur Audi Q5. ... 10
Figure I.9. Suspension passive... 11
Figure I.10. Suspension semi-active. ... 12
Figure I.11. Suspension active. ... 13
Figure II.1. Différents mouvements du véhicule. ... 14
Figure II.2. Modèle d’un quart de véhicule. ... 15
Figure II.3. Modèle d’un demi-véhicule. ... 18
Figure II.4. Profile du la route ... 22
Figure II.6. Vitesse de la carrosserie du véhicule zc. ... 22
Figure II.5. Déplacement vertical de la carrosserie du véhicule zc. ... 22
Figure II.7. Rotation de la carrosserie du véhicule selon y (tangage). ... 22
Figure II.8. Vitesse angulaire de la carrosserie du véhicule. ... 22
Figure II.9. Déplacement vertical de la roue avant z1. ... 23
Figure II.10. Vitesse verticale de la roue avant z1. ... 23
Figure II.11. Déplacement vertical de la roue arrière z2. ... 23
Figure II.12. Vitesse verticale de la roue avant z2. ... 23
Figure III.1. Schéma de principe du contrôle par Backstepping. ... 27
Figure III.2. Déplacement vertical de la carrosserie du véhicule zc. ... 43
Figure III.3. Accélération verticale de la carrosserie du véhicule zc. ... 43
Figure III.5. Accélération angulaire de la carrosserie du véhicule φ. ... 43
Figure III.6. Déplacement vertical de la roue avant z1... 44
Figure III.7. Déplacement vertical de la roue arrière z2. ... 44
Figure III.8. Signal de commande uz. ... 44
Figure III.9. Signal de commande uφ. ... 44
Figure III.10. Erreur de poursuite e1 ... 44
Figure III.11. Erreur de poursuite e3 ... 44
Figure V.1. Fonction de saturation ... 47
Figure IV.2. Schéma bloc d’une commande backstepping adaptative avec compensateur anti windup ... 49
Figure IV.3 Simulation de la commande par backstepping adaptative : avec saturation sans compensateur anti-windup ... 54
Figure IV.3 Simulation de la commande par backstepping adaptative : avec saturation avec compensateur anti-windup ... 56
Table des figures
Tableau II.1. Paramètres de simulation du modèle demi véhicule………...…..…...22 Tableau III.1. Paramètres de simulation du demi-véhicule……….43 Tableau IV.2. Paramètres de simulation du modèle demi véhicule…….…..……….43
1
Le véhicule est un système complexe qui a des comportements fortement non-linéaires. Il est composé par plusieurs sous-systèmes comme le moteur, la chaîne de transmission, le système de direction, les suspensions, les roues, les pneus, ... etc. Ce système est soumis aux sollicitations du conducteur (angle volant, pression sur les pédales) et de l’environnement (profil de route, adhérence, vent, …). Les positions et les vitesses des différents organes évoluent selon ses sollicitations. Le but de l’automatique appliquée à l’automobile est de gérer les relations entre les sollicitations et l’état du système (par ex. entre le profil de route et le confort). La conception des organes du système fait principalement appel aux disciplines qui sont la mécanique et la thermique. Mais les progrès techniques et scientifiques ont permis d’introduire de plus en plus d’actionneurs pour les différents organes comme les freins, la direction, la transmission, la suspension, …etc.
La suspension sur un véhicule est le terme donné au système composé des ressorts, des amortisseurs et des liaisons mécaniques qui connectent le châssis du véhicule aux roues. Dans l’automobile, les suspensions poursuivent deux objectifs contraires : le confort du passager et la tenue de route du véhicule. Le sol n’étant jamais parfaitement plan, les imperfections font rebondir les roues de façon d’autant plus dangereuse que la vitesse est élevée. En même temps qu’elle assure le confort des passagers, la suspension a donc pour fonction de maintenir aussi constant que possible le contact des roues avec le sol.
Dans le monde de l’automobile, il existe trois types de suspensions : la suspension passive, la suspension semi-active et la suspension active.
Les systèmes de suspension classiques, dits passifs, sont jusqu’à nos jours les plus répandus, d’une part leur bas coût et leur conception mécanique relativement simple. Leur fonctionnement consiste à dissiper l’énergie ou à filtrer la transmission des efforts et vibrations de la route vers le véhicule. Cependant, ces systèmes passifs ont atteint leurs limites en termes de performance.
Les nouvelles technologies pour les suspensions sont réparties en deux catégories selon la façon dont le contrôle est effectué. La première catégorie est celle des suspensions actives dans lesquelles le contrôle vise à imposer une force ou un déplacement nécessitant une source importante d’énergie externe. La seconde catégorie dite semi-active nécessite une faible source d’énergie pour modifier la réponse mécanique du dispositif contrôlé. Elle n’apporte aucune énergie au système à contrôler mais adapte ses performances instantanément selon une stratégie
2
entre les systèmes actifs et passifs.
L’objectif principal de ce mémoire est d’étudier l’influence des systèmes de suspension sur la dynamique verticale du véhicule et par conséquent le confort des passagers, en appliquant une commande par backstepping.
La technique de commande par backstepping et conçue en se basant sur le théorème de stabilité de Lyapunov. L’idée fondamentale de cette méthode consiste à synthétiser d’une manière récursive une loi de commande stabilisante, afin d’assurer pour une certaine fonction de Lyapunov définie positive, que sa dérivée soit toujours négative.
Les incertitudes sur le modèle des systèmes de suspension est inévitable en réalités. Pour résoudre ce problème on fait appel aux techniques de la commande adaptative basée sur l’estimation est des paramètres et/ou du modèle en ligne. Et utiliser les paramètres estimés dans le calcul de la loi de commande.
L’un des principaux problèmes rencontrés durant la conception d’une boucle de régulation est la présence de la saturation. Cette caractéristique est pratiquement inévitable dans les systèmes réels. Elle inclut des contraintes sur l’amplitude de la variable d’entrée. Ces contraintes peuvent être dues à des restrictions volontairement placées sur l’actionneur pour éviter la détérioration du système et/ou des limitations physiques sur les actionneurs eux-mêmes. Pour résoudre le problème de la saturation plusieurs solution an été élaboré dans notre cas essaye de concevoir un schéma de compensation. Atténuer les dégradations de performance causée par la saturation anti-windup capable d’atténuer les dégradations de performances causées par la saturation
Ce mémoire, s’intéresse à l’élaboration d’une commande par backstepping adaptative avec saturation des actionneurs, il deviser en quatre chapitres :
Le premier chapitre est une synthèse bibliographique sur les suspensions automobiles, nous commençant par une description détaillée des éléments qui constituent un système de suspension Après une description du rôle et des architectures existantes, et on finit par les différents types de suspension (passive, semi-active et active).
Le deuxième chapitre est consacré à la modélisation du système de suspension,
commençant par le modèle de la suspension d’un quart de véhicule, après avoir présenté les différents mouvements du véhicule (roulis, tangage et lacet), finalement, nous détaillons un modèle demi-véhicule validés par un test de simulation en boucle ouvert sous l’environnement Matlab.
3
suspension active afin d’améliorer les performances du confort et de tenu de route du véhicule automobile.
Le dernier chapitre, le problème de saturation est posé avec une solution adéquate à ce problème.
Des résultats de simulations sont présentés afin d’illustrer l’efficacités des approches développées au cours du travail.
4
Figure I.1. Exemples des ressorts hélicoïdaux I.1 Introduction
Le système de suspension fonctionne grâce au phénomène de friction qui se crée entre la route et les roues, et va fournir au conducteur une maniabilité suffisante et une direction stable, permettant ainsi une conduite plus confortable.
Sans système de suspension, à chaque bosse ou irrégularité rencontrée sur la route, l’énergie créée se propagerait dans le châssis du véhicule, et finalement les roues perdraient leurs contacts avec le sol. Cela peut se produire en une fraction de seconde, la gravité ramènerait ensuite la voiture sur la route sans que rien n’absorbe le choc et l’énergie crée par ce mouvement. En d’autres termes, la conduite serait extrêmement inconfortable. C’est pour cela que le système de suspension comprend plusieurs composants clés qui ajoutent du confort à la conduite comme : l’amélioration de la direction et de la distribution d’énergie crée entre le véhicule et la route de manière plus uniforme dans l'ensemble de la voiture. Vous pouvez donc vous réjouir de l’existence d’un tel système sans lequel l’expérience de la route ne serait pas aussi agréable.
Dans ce chapitre, on s’intéresse à la représentation des généralités sur la suspension des véhicules.
I.2 Eléments de la suspension [5] I.2.1 Ressort hélicoïdal
Il s’agit de l’élément élastique situé entre les roues et le châssis par le biais de différents types d’assemblages. Il supporte le poids du véhicule et absorbe les irrégularités du terrain. Il est formé par une tige en acier enroulée en forme de spirale. Ses spires deviennent plates à la fin, afin d’obtenir une bonne assise. Il travaille en torsion en se tordant sous les efforts extérieurs qu’il supporte.
5
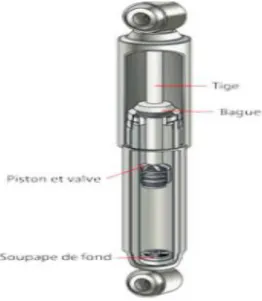
Figure I.2. Amortisseur hydraulique I.2.2 Amortisseurs
Ils sont chargés d’absorber les oscillations des ressorts afin d’éviter qu’elles ne se transmettent à la carrosserie. L’amortisseur le plus utilisé dans le secteur automobile est l’amortisseur hydraulique de type télescopique. Ils fonctionnent selon le principe de déplacement des fluides, aussi bien dans le cycle de compression que dans celui d’extension. Il est essentiellement composé d’un piston qui glisse à l’intérieur d’un cylindre rempli d’huile. Ce piston présente des soupapes où circule l’huile d’une chambre à l’autre. Le contrôle du passage de l’huile est celui qui régule l’amortissement des oscillations. Les amortisseurs à gaz présentent une amélioration par rapport à ceux mentionnés ci-avant. Pour leur fonctionnement, ils ajoutent un gaz d’azote pressurisé à l’intérieur à une pression constante sur le liquide hydraulique. Ce type de fonctionnement permet d’obtenir un amortisseur plus silencieux et une réponse plus rapide.
I.2.3 Barre stabilisatrice
Il est chargé de maintenir le véhicule dans une position horizontale stable lorsqu’il circule dans des virages ou sur une chaussée irrégulière. Il est constitué d’une barre en acier élastique située entre les deux bras des roues sur un même essieu et ancré dans sa partie centrale à la carrosserie. Lors d’un virage, une roue tend à descendre et l’autre à monter, créant un effet de torsion dans la barre qui absorbe l’effort et empêche que la carrosserie ne s’incline d’un côté. Le même effet a lieu lorsqu’une des roues rencontre un nid-de-poule ou un obstacle.
6
Figure I.3. Barre stabilisatrice.
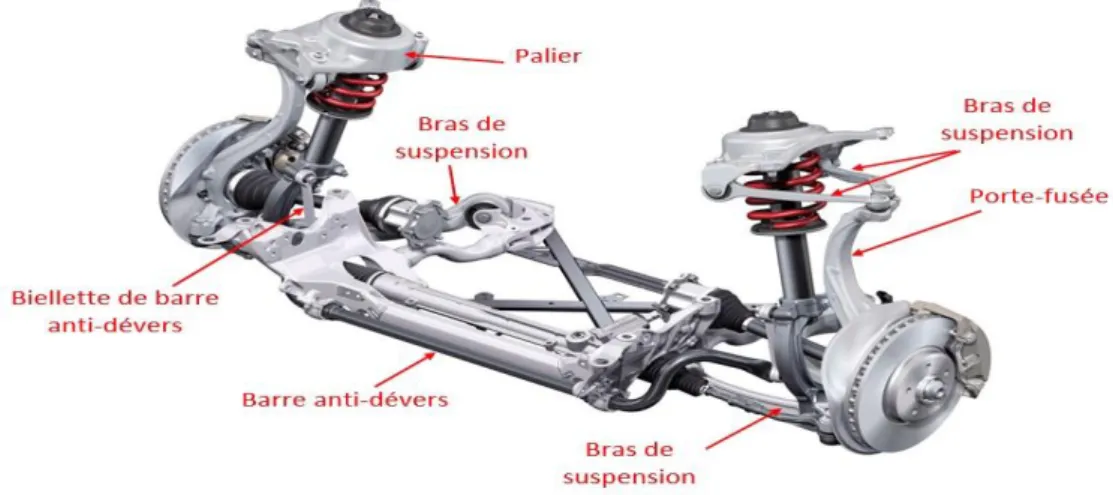
Figure I.4. Bras articulés. I.2.4 Bras articulés
Ils équipent les véhicules avec des roues indépendantes, reliant la carrosserie à la roue. Ils sont chargés de maintenir la fusée, d’améliorer le guidage du pneu et de permettre son oscillation. Les bras de suspension peuvent être montés de manière transversale, oblique, multi bras ou longitudinale.
I.2.5 Le pneu
Est monté sur une jante, il a pour fonction première l’adhérence mais il joue aussi un rôle comparable à l’amortisseur en se déformant. C’est un composant essentiel dans la maîtrise du comportement d’un véhicule. Il transmet les forces longitudinales nécessaires à l’accélération et au freinage ainsi que les forces latérales permettant de tourner.
Remarque :
D’autres pièces assurent la liaison de la suspension au châssis ainsi que l’entrainement de roues telles que le moyeu qui est la partie centrale de la roue traversée par l’essieu. Ce dernier est une barre transversale supportant la carrosserie du véhicule. Des pièces en
7
matériau caoutchouté (bushing) sont placées aux extrémités de fixation de l’amortisseur afin de fournir une isolation des vibrations acoustiques.
I.3 Rôle de la suspension
La suspension joue un rôle primordial dans la sécurité el la bonne tenue de route d’un véhicule. La suspension est en lien direct avec la route. Elle influe sur la tenue de route, la direction et le comportement du véhicule. La connaissance de son fonctionnement et un bon diagnostic sont donc nécessaires pour assurer la sécurité et le confort des occupants.
I.4 Critère d'évaluation de la performance de la suspension du véhicule [2]
Pour évaluer les performances de différents systèmes de suspension, certains indices d’évaluation sont établis afin d’évaluer le confort de conduite et la tenue de route.
I.4.1 Le Confort
Le premier but des suspensions automobiles est d’atténuer les perturbations causées par les imperfections de la route et idéalement d’éliminer les vibrations néfastes pour le véhicule et pour les passagers afin d’assurer un meilleur confort et un bien-être des passagers dans le véhicule. Selon l’accélération à laquelle est soumis le passager, ce dernier peut ressentir des malaises. Par exemple, à certaines fréquences, une sensation de malaise due aux vibrations de certains organes du corps humain peut être ressentie. De plus, l’allongement de la durée d’exposition aux vibrations augmente la sensibilité du corps humain.
Dans ce contexte, afin de quantifier le confort, des normes définissent les seuils de tolérance du corps humain aux vibrations en fonction de l’amplitude, de la fréquence et de la durée des perturbations.
I.4.2 La tenue de route
Sur un véhicule, la suspension doit assurer la continuité du contact roue/chaussée malgré les défauts de la route. La tenue de route représente la stabilité d’un véhicule, elle est relative à la capacité du véhicule à suivre la trajectoire que le conducteur souhaite lui imposer. Pour obtenir cela, il faut que les efforts moteurs, directionnels ou de freinage soient correctement transmis. C’est le pneu qui génère les forces longitudinales et latérales nécessaires aux changements étaux corrections de trajectoire. Cette force varie en fonction des paramètres suivants :
- Le glissement qui correspond à la différence entre la vitesse de déplacement longitudinale du véhicule et la vitesse de rotation de la roue rapporté (en la multipliant par le rayon de la roue) au niveau de la surface de contact.
8
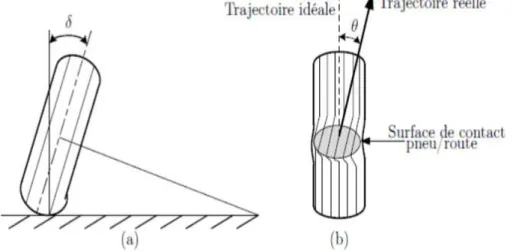
Figure I.5. Illustration des angles de carrossage (a) et de dérive (b).
- L’angle de carrossage qui désigne l’angle formé par le plan de roulement de la roue avec la verticale (figure I.5).
- L’angle de dérive qui est la variation de la trajectoire du véhicule due à la déformation
- Transversale du pneu quand il est soumis à l’action d’une force latérale lors d’un virage.
- C’est l’angle formé par le plan de la roue et la tangente à la trajectoire réelle du pneu (figure I.5).
- La force normale ou la force verticale, elle correspond à la composante verticale de la force appliquée à la surface de contact entre le pneu et la route.
I.5 Architecture des suspensions courantes [6]
Pour les besoins de la suspension, les roues d'un véhicule doivent pouvoir se déplacer verticalement par rapport au châssis. Examinons maintenant les différentes architectures existantes permettant ce déplacement.
I.5.1 Le Macpherson
L’architecture Macpherson (du nom de son inventeur) est à roues indépendantes. Elle est constituée :
• D’une jambe de force • D’un bras de suspension
• D’une barre stabilisatrice (barre antiroulis) • D’un porte moyeu
9
Figure I.6. Schéma cinématique en perspective d'une suspension de type Macpherson.
Figure I.7. Un train avant a double triangulation (Audi R8).
Un ressort hélicoïdal et un amortisseur sont solidaires et forment ce que l'on appelle une "jambe de force". L'extrémité inférieure de cette jambe de force est assemblée au porte-moyeu de manière rigide tandis que son extrémité supérieure est liée au châssis à l'aide d'une liaison rotule. Le porte moyeu est guidé dans sa partie inférieure par une association du bras de suspension et de la barre stabilisatrice. Cette association peut être réalisée par l'intermédiaire d'une biellette.
I.5.2 La double triangulation
Une architecture à double triangulation est composée :
• D’une jambe de force
• D’un triangle de suspension inférieur • D’un triangle de suspension supérieure
• D’un porte moyeu
Le porte moyeu est tenu par deux triangles de suspension. Ces derniers sont chacun liés au châssis par l'équivalent d'une liaison pivot (association d’un linéaire annulaire et d'une
10
Figure I.8. Un train avant à architecture "multi bras" utilisé sur Audi Q5.
rotule). Dans sa partie inférieure, la jambe de force est liée au bras de suspension inférieur, tandis que sa partie supérieure est assemblée au châssis. Ce type d'architecture permet un guidage des roues très rigoureux. Il est très utilisé sur les modèles sportifs.
I.5.3 Multi bras
Une architecture multi bras est composée :
• De plusieurs bras de suspension (généralement 4 ou 5) • D’un ambre de force
• D’un porte moyeu Chaque bras de suspension bloque un degré de liberté de la roue. Cette architecture est
complexe mais permet un guidage très précis des roues avant. Elle est généralement utilisée sur des modèles haut de gamme de type routières.
I.6 Types de suspension [2] I.6.1 Suspension passive
Une suspension passive est généralement équipée d’un ressort et d’un amortisseur. Le ressort est défini par sa caractéristique Force /Position. Il fournit une force qui dépend de l’écart de position entre la caisse et la roue. La force développée par l’amortisseur dépend de sa caractéristique Force/Vitesse.
Dans le cas d’un amortissement passif, la force u générée par l’amortisseur doit simplement être remplacée par :
( roue caisee)
11
Figure I.9. Suspension passive.
Ou ‘𝑐’ est une fonction non-linéaire donnée par la caractéristique de l’amortisseur. Cette fonction ne peut donc être choisie qu’à chaque changement d’amortisseur.
s
m Et m représentent, respectivement la masse suspendue et non suspendue (châssis et la u roue)
s
z
,z
uetz
r sont le déplacement de la caisse, de la roue et le profil de la route (perturbation).I.6.2 Suspension semi-active
Une suspension semi-active est généralement constituée d’un élément passif, assimilable à un ressort, et d’un amortisseur semi-actif. Un amortisseur semi-actif, tout comme l’amortisseur passif, ne peut que dissiper de l’énergie en produisant une force qui s’oppose à la vitesse relative entre la caisse et la roue. Mais contrairement à un amortisseur passif, cette force est modulable, d’où le nom « semi-actif ».
Le choix de cette force peut se faire de façon continue ou quantique. Dans le cas continu, la force délivrée peut-être choisie librement dans un intervalle dont les limites varient en fonction de la vitesse relative entre la caisse et la roue. Dans le cas quantique, l’amortisseur dispose d’un certain nombre de lois pour sa caractéristique Force-Vitesse. Ainsi le nombre de valeurs possibles, pour la force développée par l’amortisseur, est fixe et égale au nombre de lois, C’est dans ce dernier cadre que nous avons travaillé avec PSA.
12
Figure I.11. Suspension semi-active.
Notons que certains auteurs utilisent le terme « pilotée » pour parler d’une suspension semi-active constituée d’un amortisseur dont le coefficient d’amortissement peut être piloté dans une certaine plage.
I.6.3 La suspension active
Les suspensions passives et semi-actives produisent des forces qui sont limitées par les positions et les vitesses relatives entre la caisse et la roue et qui ne peuvent que dissiper de l’énergie.
Les suspensions actives sont des solutions qui permettent de dépasser ces limitations. La suspension hydractive (Citroën) par exemple permet, en faisant varier à l’aide d’une
pompe, la pression du fluide dans la suspension hydraulique, de générer une force indépendante des positions relatives de la caisse et de la roue. Cependant, ces suspensions actives consomment de l’energie.et elles en consomment d’autant plus que la bande passante de ces suspensions est élevée. Il existe donc un compromis entre la bande passante de la suspension active et sa consommation d’énergie.
13
Figure I.12. Suspension active. I.7 Conclusion
Dans ce chapitre, nous avons donné une idée générale sur le système de suspension d’automobile et tous les éléments qui constituent ce système. Les performances d’une suspension sont généralement limitées au confort et à la tenue de route, mais nous avons présenté d’autres critères influents dans le domaine de l’automatique ou même dans le domaine de l’industrie des véhicules.
Le chapitre suivant, réalise une modélisation d’un système de suspension active avec une simulation en boucle ouverte.
14
II.1 Introduction
La modélisation est une étape très importante pour l’analyse et la commande d’un système. Notre objectif dans ce chapitre est d’établir des modèles dynamiques représentant le comportement d’une suspension. Ces modèles nous permettront d’analyser le comportement de la suspension et d’établir des lois de commande en boucle fermée.
La modélisation de la suspension d’un véhicule repose sur l’utilisation des lois mécaniques. Il faut noter que ce modèle doit être aussi précis pour refléter le plus fidèlement le comportement de la suspension d’une part et doit être simple pour faciliter l’étape de l’élaboration de la loi de commande d’autre part. Le système de suspension proposé est composé de la combinaison d'éléments passifs tels que ressorts et amortisseurs : c’est le cas de la suspension passive et une suspension active qui intègre un élément actif qui génère une force de consommation d’énergie.
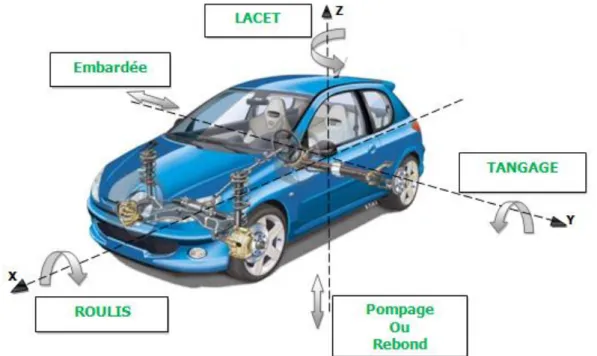
Pour la modélisation, on peut distinguer trois modèles de suspensions : le modèle quart véhicule, le modèle demi-véhicule et le modèle complet du véhicule. Le choix d'un modèle de suspension de véhicule, dépend des différents éléments constituant le système de suspension d'un véhicule et des mouvements auxquels on s’intéresse. Les principaux mouvements généralement pris en compte, sont les déplacements verticaux, latéraux, longitudinaux, le roulis (roll), le lacet (yaw) et le tangage (pitch).
II.2 Les différents mouvements du véhicule [7]
Le véhicule automobile représenté sur la figure II.1 est un système complexe possédant six degrés de liberté constitués par un ensemble de rotations et de translations de la caisse qui est considérée comme une masse suspendue. Le système d’axes par rapport auquel sont définis les différents mouvements du véhicule est le repère orthonormé direct R (G, x, y, z) de la figure II.2 L’origine de ce repère est prise au centre de gravité du véhicule. La translation sur l’axe x caractérise le déplacement longitudinal du véhicule et le déplacement latéral se fait selon l’axe y. La translation sur l’axe z permet le mouvement vertical de la caisse du véhicule par l’intermédiaire de ses suspensions. Par ailleurs, les mouvements de rotations de la caisse par rapport aux trois axes sont :
• Le roulis (φ) qui est dû à des oscillations autour de l’axe x, phénomène en particulier ressenti lorsque le véhicule se déplace dans un virage.
• Le tangage (θ) qui est produit par des mouvements angulaires autour de l’axe y, phénomène qui intervient lors des phases d’accélération et de freinage.
15
Figure II.1. Différents mouvements du véhicule.
• Le lacet (ψ) qui est le mouvement de rotation autour de l’axe z.
II.3 Modélisation de la suspension des véhicules
Les modèles développés dans la littérature diffèrent suivant le type de système de suspension analysée et l’objectif de l’analyse. Cette partie s’attache donc à décrire les modèles utilisés dans la conception active de manière suffisamment exhaustive. On utilisera deux modèles comme support :
➢ Modèle quart de véhicule. ➢ Modèle demi-véhicule. [8]
II.3.1 Modèle d’un quart de véhicule [9]
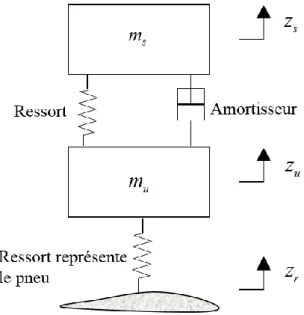
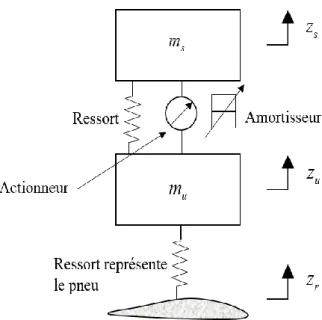
Le modèle le plus simple est le modèle dit quart de véhicule. Il ne prend en compte que le mouvement vertical de la caisse. Lorsqu'on s‘intéresse au confort, on ne peut pas prendre en compte que le déplacement vertical de la caisse et pas celui de la roue. Ce modèle appelé modèle quart de véhicule à un degré de liberté (1ddl). Il prend en compte le mouvement vertical de la caisse, mais non celui de la roue. Ce modèle est considéré comme un modèle de référence du comportement vertical de la caisse du véhicule. Il inclut une masse qui représente celle de la caisse, reliée directement au sol soit par un simple ressort, un ensemble de ressort-amortisseur ou un ressort-amortisseur en parallèle avec un actionneur.
16
Figure II.2. Modèle d’un quart de véhicule.
Si de plus, la tenue de route étudiée, il convient de tenir compte aussi du mouvement vertical de la roue. Ce modèle, appelé modèle quart de véhicule à 2ddl (Figure II.2) est un modèle plus complexe mais plus représentatif du système. Ce modèle est souvent étudié en considérant parfaits, les ressorts et les amortisseurs constituant les systèmes de suspension. Des modèles plus réels intégrant la non-linéarité des éléments de la suspension, tels que le ressort et l’amortisseur, ou la dynamique de l’actionneur sont utilisés pour analyser le comportement de la suspension.
Dans cette section, on utilise le modèle de quart de véhicule avec deux degrés de liberté (2ddl) comme illustré à la figure. II.2. Dans ce cas nous présentons l'hypothèse d'un mouvement vertical du véhicule.
L'entrée du système est le mouvement vertical de la route sous le pneu. Le modèle est composé de deux masses distinctes. La masse non-suspendue m représente la masse du u
pneu, de la jante, du porte-moyeu et la moitié des bras de suspension. La masse suspendue
s
m représente la masse du châssis supportée par la roue en question. Le pneu est modélisé par un ressort linéaire de constante K situé entre la masse non suspendue et la route. t L'amortissement du pneu est considéré comme négligeable. La suspension proprement dite est composée d'un ressort en parallèle avec un amortisseur linéaire de constantes ks et b . c L'actionneur applique une force u entre les masses suspendues et non suspendues.
17
L’application de la 2ème loi de Newton sur le modèle quart de véhicule représenté dans la
(figure II.2), donne les équations du mouvement suivantes :
mx =
Fi s s k b u u k b t m z f f u m z f f f u = − − + = + − − (II.1)• f : Effort exercé par le ressort suspension.k
• f : Effort exercé par l’amortisseur.b • f : Effort exercé par le pneu. t
• m : La masse suspendue (c.à.d. quart de la masse posée sur les suspensions)s .
• m : La masse non suspendue (c.à.d. la masse des pièces mécaniques constituant u
l'assemblage de la roue).
• z : Le déplacement vertical de s ms autour de sa position statique.
• zu: Le déplacement vertical de mu autour de sa position statique.
• z : Représente le profil vertical du sol. r • u: La force générée par l’actionneur.
II.3.1.1 Cas linéaire
Si en considérant les ressorts et les amortisseurs sont linéaires, les forces (f , k f , b f ) t sont données par :
(
)
(
)
(
)
k s s u b c s u t t u r f k z z f b z z f k z z = − = − = − (II.2)En remplaçant (II.2) dans l’équation du mouvement (II.1) :
(
)
(
)
(
)
(
)
(
)
s s s s u c s u u u s s u c s u t u r m z k z z b z z u m z k z z b z z k z z u = − − − − + = − + − − − − (II.3) D’où :18
(
)
(
)
(
)
(
)
(
)
1 1 s s s u c s u s u s s u c s u t u r u z k z z b z z u m z k z z b z z k z z u m = − − − − + = − + − − − − (II.4)Pour obtenir la représentation d’état de ce système on choisit les variables d’état comme suite : 1 2 3 4 s u s u z x z x x z x z x = = (II.5)
Considérant
z
r comme une entrée perturbatrice(
=zr)
et u comme une entrée de commande, le résultat est un système de quatre équations de la forme :x =Ax +B w1 +B u2 (II.6) Avec les matrices suivantes :
(
)
0 0 1 0 0 0 0 1 s s c c s s s s s t s c c u u u u k k b b A m m m m k k k b b m m m m − − = + − − , 1 0 0 0 t u B k m = , 2 0 0 1 1 s u B m m = − (II.7)II.3.1.2 Cas non linéaire
Considérant la non linéarité du ressort, les équations des forces deviennent :
(
)
(
)
(
)
3 k s s u s s u b c s u f k z z p z z f b z z = − + − = − (II.8)II.3.2 Modèle d’un demi-véhicule [10]
Le modèle demi-véhicule regroupe deux quarts de véhicule connectés entre eux par un châssis considéré comme homogène il est utilisé pour prendre en compte, en plus des mouvements verticaux, les mouvements de roulis ou du tangage de la caisse. Ce modèle représente une vue de côté d'un véhicule.
19
Figure II.3. Modèle d’un demi-véhicule.
Le modèle de la Figure II.3 á 4 degrés de liberté : le mouvement vertical du châssis, le mouvement du tangage, le déplacement de la roue avant et le déplacement de la roue arrière.
La suspension entre la masse de la caisse et la masse de la roue avant (Roue arrière) est modélisée par un ressort, un amortisseur et un actionneur. Les deux roues sont modélisées par des simples ressorts et amortisseurs. Dans ce modèle M et I représente la masse
suspendue du véhicule et sont moment d’inertie. f
m et mrsont les masses non suspendues des roues avant et arrière respectivement ; aet b sont la distance de la suspension avant et arrière au centre de gravité du véhicule.
c
z et sont respectivement le déplacement vertical et le tangage du châssis ; z1et z2le déplacement verticale de la roue (masse non suspendue) avant et arrière, respectivement ;
01
z et z02 profil de la route sous chaque roue avant et arrière, respectivement (entrées perturbatrices).
Les forces du ressort et les forces d’amortissement de la suspension avant et arrière sont notées : Fsf etFsr,Fdf et Fdr,respectivement ; Ftf etFtr,Fbf etFbrsont respectivement les forces du ressort et d’amortissement des pneus avant et arrière ; u1etu2
20
Par l’application de la 2iémeloi de Newton :
mx=
Fi (II.9)J =
Mi (II.10)Les équations dynamiques de la masse suspendue et non suspendue sont données par :
Mzc+Fdf +Fdr +Fsf +Fsr = +uz Fl
I=a F( df +Fsf)−b F( dr +Fsr)=u +F m zf 1−Fsf −Fdf +Ftf +Fbf = −u1
m zr 2−Fsr−Fdr +Ftr +Fbr =u2 (II.11)
uz = +u1 u2 et u =au1−bu2
Avec, FlEt Fsont les forces de frottements des composants de la suspension.
Les formules des forces appliquées sont données par :
Fsf =kf1 +yf knf1 y3f Fsr = +kr1 yr knr1y3r (II.12) 1 1 e f df c f b y F b y = 2 2 e r dr c r b y F b y = (II.13) Ftf =kf2(z1−z01) Ftr =kr2(z2−z02) (II.14) Fbf =bf2(z1−z01) Fbr =br2(z2 −z02) (II.15)
Où : kf1,knf1etkr1,knr1sont les coefficients de rigidités avant et arrière respectivement,
2, 2, 2, 2
f r f r
k k b b , sont les coefficient du ressort et d’amortisseur de vous bei,et ( 1, 2)
ci
b i = les coefficient d’extension et de compression des amortisseurs 1 2 sin sin f c r c y z a z y z b z = + − = − − (II.16)
En choisissant les variables d’état suivantes :
21 1 c x =z x2 =zc x3 =
x4 =
x5=z1 x6 =z1 x7 =z2 x8 =z2
1 2 3 4 5 6 7 8
T x= x x x x x x x x (II.17)Les équations dynamiques en (II.1) peuvent être réécrites sous la forme suivante : x1=x2 x2 1 ( Fdf Fdr Fsf Fsr uz) d x t1( , ) M = − − − − + + x3 =x4 4 2 1 ( ( df sf) ( dr sr) ) ( , ) x a F F b F F u d x t I = − + + + + + x5 =x6 x6 1 (Fsf Fdf Ftf Fbf u1) mf = + − − − x7 =x8 x8 1 (Fsr Fdr Ftr Fbr u2) mr = + − − − (II.18) Avec d x t et 1( , ) d2( , )x t sont des perturbations.
II.4 Simulation en boucle ouverte
Pour valider le comportement temporel en boucle ouverte du modèle présenté
précédemment, on a réalisé des tests de simulation de ce modèle en considérant un passage sur une perturbation de type dos-d’âne.
Les paramètres de modèle demi-véhicule utilisé lors de la simulation sont illustrés par le tableau II.1
22
Tableau II.1 – paramètres de simulation du modèle demi véhicule Paramètres Valeurs Paramètres Valeurs
M 1200 (kg) 2 f b 1500 (Ns m/ ) f r m =m 100 (kg) br2 2000 (Ns m/ ) I 2 600 (kgm ) be 1500 (Ns m/ ) 1 1 f r k =k 15000 (N m/ ) bc 1200 (N m/ ) 1 1 nf nr k =k 1000 (N m/ )
a
1.2 ( )m 2 f k 200000 (N m/ ) b 1.5 ( )m 2 r k 150000 (N m/ ) V 20 (m s/ )La perturbation de type dos-d’ane est modélisée par une portion de sinusoïde et plus exactement. Le profil de cette perturbation dépend bien sur du ralentissement (amplitude, longueur, etc…). Soit le choix suivant (figure II.4) :
01 [1 cos(8 )] , 1 1.25 2 0 b h t t z ailleur − =
Avec, hb =0.02 m. L’amplitude de ce ralentisseur
Le profil de la route est le même sur la roue arriérée avec un retard du temps de (a+b / v) avec v la vitesse du véhicule
02 [1 cos(8 )] , 2 2.25 2 0 b h t t z ailleur − =
Nous avons fait une simulation dans les conditions initiales sont :x1(0) 10= cm,
3(0) 0.05
x = , et les restes du vecteur d’état est nul.
La réponse du système en boucle ouverte pour cette perturbation est montrée dans la famille des figure II.5 a II 12.
23
Figure II.4. Profile du la route
Figure III.5. Déplacement vertical de la
carrosserie du véhicule zc.
Figure III.6. Vitesse de la carrosserie du
véhicule 𝑧𝑐ሶ.
Figure III.7. Rotation de la carrosserie du
véhicule selon y (tangage).
Figure III.8. Vitesse angulaire de la carrosserie
24
Figure III.10. Vitesse verticale de la roue avant
𝑧1ሶ.
D’après les résultats de simulation présentés dans les figures précédentes, on peut constater que :
- Les réponses obtenues montrent que le système de suspension est stable
- Les performances ne sont pas satisfaisantes regardant le grand dépassement et le temps de rétablissement important lors de passage par le ralentisseur
Figure III.9. Déplacement vertical de la roue
avant z1.
Figure III.11. Déplacement vertical de la roue
arrière z2.
Figure III.12. Vitesse verticale de la roue avant
25
II.5 Conclusion
Dans ce chapitre, nous avons cités les différents éléments et mouvements du véhicule. Après nous avons modélisés le système de suspension demi-véhicule, et ont fini par une simulation en boucle ouvert. Dans le chapitre suivant, notre but est de concevoir une commande par backstepping adaptative dans le but d’améliorer les performances du système de suspension.
26
III.1 Introduction
Depuis quelques années, beaucoup de progrès ont été faits dans le domaine de la commande des systèmes non linéaires. La technique du Backstepping fait partie de ces nouvelles percées dans ce domaine. Elle a été développée par Kanellakopoulos, au début des années '90. Elle offre une méthode systématique pour effectuer le design d'un contrôleur, pour des systèmes non linéaires. L'avantage principal de cette méthode est de garantir la stabilité du couple contrôleur-procédé. La méthode du Backstepping permet de déterminer une loi de mise à jour des paramètres, pour une loi de commande adaptative, qui garantit, elle aussi, la stabilité du couple contrôleur- procédé.
Dans les systèmes de suspension active, les incertitudes sont inévitables et peuvent être classées en deux catégories. Les incertitudes paramétriques, comme la masse du corps du véhicule et les incertitudes générales provenant d’erreurs de modélisation et de perturbations externes.
Pour traiter cette situation nous proposons dans ce chapitre une commande par backsteping adaptative.
III.2 Systèmes non linéaires
Par définition, un système non linéaire est un système qui n’est pas linéaire, c’est-à-dire (au sens physique) qui ne peut pas être décrit par des équations différentielles linéaires à coefficients constants. Cette définition, ou plutôt cette non-définition explique la complexité et la diversité des systèmes non linéaires et des méthodes qui s’y appliquent. Il n’y a pas une théorie générale pour ces systèmes, mais plusieurs méthodes adaptées à certaines classes de systèmes non linéaires.
III.3 Propriétés des systèmes non linéaires [13]
Les systèmes non linéaires sont décrits par des équations différentielles non linéaires. Ils sont caractérisés par les propriétés suivantes :
1) Principe de superposition n’est pas applicable ;
2) Points d’équilibre multiples : un système non linéaire présente plusieurs points d'équilibre isolés (pour le système linéaire, le point d’équilibre est unique) ;
3) Cycle limite : les systèmes non linéaires peuvent exhiber des oscillations à amplitudes et fréquences fixes en l’absence d’une entrée exogène ; ces oscillations sont appelées cycles limites ;
27
4) Bifurcation : la théorie de la bifurcation a montré que le changement quantitatif des paramètres du système entraîne un changement qualitatif dans son comportement, ainsi la stabilité peut être affectée par ce changement quantitatif ;
5) Chaos : les systèmes non linéaires présentent un phénomène chaotique qui est défini par la sensibilité de la sortie vis-à-vis des valeurs initiales ;
6) Temps d’échappement fini : l'état d'un système non linéaire instable peut aller à l'infini en un temps fini ;
7) Oscillations sous harmoniques, harmoniques où apériodiques : pour une entrée sinusoïdale, le signal de sortie peut contenir de nombreux harmoniques et sous harmoniques avec amplitudes et déphasages différents (la sortie d'un système linéaire ne contiendra qu'une sinusoïde à la sortie).
III.4 Commande par Backstepping [11] III.4.1 Principe
La technique de commande Backstepping est une méthode récursive qui permet de construire une loi de commande qui garantit la stabilité du système. Elle propose une méthode de synthèse systématique destinée à la classe des systèmes non linéaires ayant une forme triangulaire. Elle est basée sur la décomposition du système entier de commande, qui est généralement multi variable (MIMO) et d’ordre élevé en une cascade de sous-systèmes de commande du premier ordre. Pour chaque sous système, une loi de commande dite virtuelle est calculée. Cette dernière servira comme référence pour le sous-système suivant jusqu'à l’obtention de la loi de commande pour le système complet. Par ailleurs, cette technique a l’avantage de conserver les non linéarités utiles pour la performance et la robustesse de la commande, contrairement aux méthodes de linéarisation. La détermination des lois de commande qui découle de cette approche est basée sur l’emploi des fonctions de lyapunov de commande (CLF).
𝑢
𝑦 = 𝑥1 𝑥 = [𝑥1, 𝑥2, … 𝑥𝑛] 𝑇 𝑦𝑑 Système non linéaire Régulateur Backstepping28
III.4.2 Méthodes de Lyapunov
La commande des systèmes non linéaire s’appuie sur deux approches possibles. La première vise à linéariser le système à commander, afin de profiter des techniques consacrées aux systèmes linéaires. La deuxième approche consiste à trouver une Fonction de Commande de Lyapunov garantissant certaines performances pour le système en boucle fermée. De telles fonctions peuvent être très difficiles à trouver pour un système non linéaire d'ordre élevé.
La technique du Backstepping permet de réduire avantageusement cette complexité. L’analyse de la stabilité dans le cadre de l’utilisation du Backstepping est basée sur les méthodes Lyapunov qui constituent un outil très puissant pour tester et trouver des conditions suffisantes à la stabilité des systèmes dynamiques, sans avoir à résoudre explicitement les équations différentielles les décrivant.
❖ Première méthode de Lyapunov
Cette méthode permet d’analyser la stabilité, d’un système à partir de l’étude de la stabilité locale par linéarisation de la dynamique autour d'un point d'équilibre. Cette méthode est d'une importance limitée, car elle ne permet d'étudier que la stabilité locale et ne donne pas d’information sur le domaine de stabilité global. De plus, dû aux approximations du premier degré (linéarisation), il n'est pas possible de tenir compte de tous les types de phénomènes non-linéaires. Si on trouve que le système linéarisé est instable, le système non linéaire le sera nécessairement aussi.
❖ Deuxième méthode de Lyapunov
Cette méthode est basée sur le concept d'énergie dans un système. Le principe de cette méthode consiste à analyser la stabilité du système, sans même résoudre les équations différentielles non linéaires qui le régissent. La stabilité dépend uniquement de l'étude des variations (signe de la dérivée) de l'énergie, ou d’une fonction qui lui est équivalente, le long de la trajectoire du système.
L’étude de la stabilité d'un système caractérisé par un vecteur d’état, consiste alors à chercher une fonction V(x) (représentative de l'énergie) de signe défini, dont la dérivée
/
dV dt est semi-définie et de signe opposé dans le même domaine.
III.4.3. Méthode générale de synthèse par Backstepping
Cette méthode s’applique à des systèmes ayant une forme dite triangulaire, telle que l’indique la représentation suivante :
29 1 1 1 0 1 2 2 2 1 2 1 1 2 3 1 1 1 ( ) ( ) ( , ) ( , ) ( ,..., ) ( ,..., ) n n n n n x f x g x x x f x x g x x x x f x x g − x x u = + = + = + (III.1)
Avec :x=
x1 x2 ... xn
TR u Rn, , gi et f ii( =1... )n sont des fonctions non linéairescontinues et connues telle que fi(0)= et 0 g x i( ) 0,
n
x R
.
Afin d’illustrer la procédure récursive de la méthode Backstepping, on considère que la sortie du système y= désire suivre le signal de référencex1 y .Le système étant d’ordre n, r la mise en œuvre s’effectue en n étapes.
❖ Etape 1
On commence par la première équation du système (III.1), ou x sera considérée 2 comme une commande virtuelle intermédiaire. La première référence désirée est notée :
1d 0 r
x = = y (III.2) Ce qui conduit à l’erreur suivante :
1 1 0
e = −x (III.3) Ainsi sa dérivée est :
( )
( )
1 0 1 1 0 1 2 0
e=x − = f x +g x x − (III.4)
Pour un tel système, nous construisons d’abord la fonction de Lyapunov V sous une forme 1 quadratique 2 1 1 1 2 V = e (III.5) Sa dérivée temporelle est :
( )
( )
1 1 1 1 1 1 0 1 2 0
V =e e =e f x +g x x −
(III.6) Un choix judicieux de x rendrait 2 V1 négative et assurerait la stabilité pour la dynamique de (III.4). Pour cela, prenons : x2 =1 telle que :( )
( )
1 1 0 1 2 0 1 1
f x
+
g x x
− = −
k e
(III.7)1 0
k est une constante de conception.
30
( )
( )
1 1 1 0 1 1 0 1 1 k e f x g x = − + − (III.8) Ce qui implique 2 1 1 1 0 V = −k e (III.9) ❖ Etape 2Maintenant, la nouvelle référence désirée sera la variable de commande pour le sous-système précédent (III.4) :
2d 1 x = (III.10) D’où l’erreur : 2 2 1 e =x − (III.11) Sa dérivée est :
(
)
( )
2 2 1 2 1, 2 1 1, 2 3 1 e = − =x
f x x +g x x x −
(III.12) Pour le système (III.12), la fonction de lyapunov étendue est :2 2 2 2 1 2 1 2
1 1 2 2
V = +V e = e +e (III.13) Dont la dérivée est :
(
)
(
)
2
2 1 2 2 1 1 2 2 1, 2 1 1, 2 3 1
V = +V e e = −k e +e f x x +g x x x −
(III.14) Le choix de x qui stabilisera la dynamique du système (III.12), et rendra 3 V2 négative est : 3 2 x = (III.15) Telle que :(
)
2 1,
2 1( ,
1 2)
3 1 2 2f
x x
+
g x x x
−
= −
k e
(III.16) 2 0k Est une constante de conception.
Ainsi, la loi de commande pour le système (III.12) sera :
(
)
(
)
2 2 2 1 2 1 2 1 1 2 1 , , k e f x x g x x = − + − (III.17) Avec :( )
( )
( ) ( )
( )
0 1 1 1 0 1 1 1 1 0 1 1 1 1 2 0 1 g x k e f x k e f x g x g x = − + − − − + − (III.18)Un tel choix implique que :
2 2
2 1 1 2 2 0
31
❖ Etape n
De la même façon, pour cette étape la référence à suivre sera :
1
nd n
x = − (III.20) D’où l’erreur de régulation :
1 n n n e =x − − (III.21) Sa dérivée est :
(
)
(
)
1 1,..., 1 1,..., 1 n n n n n n n n e =x − − = f x x +g − x x u− − (III.22) Pour le système (III.22), la fonction de lyapunov étendue est :2 2 2 2 1 2 1 2 1 1 ... ... 2 n 2 n V = +V V + + e = e +e + +e (III.23) Sa dérivée est :
(
)
(
)
1 2 2 2 1 1 2 2 1 1 1 1 ... ... ,..., ,..., n n n n n n n n n V V V e e k e k e e f x x g − x x u − = + + + = = − − + + + − (III.24) Dans cette dernière étape, on est arrivé à déduire la loi de commande pour le système entier. Un bon choix doit satisfaire :(
)
1 1 1 1
( ,..., ) ,...,
n n n n n n n
f x x +g − x x u− − = −k e (III.25) Ou k est une constante de conception. n 0
Ainsi, la loi de commande pour le système sera donnée par :
(
)
1(
1)
1 1 1 ,..., ,..., n n n n n n n u k e f x x g − x x − = − + − (III.26)Ce qui garantit la négativité de la dérivée de la fonction de lyapunov étendue :
2 2 2
1 1 2 2 ... 0
n n n
V = −k e −k e − −k e (III.27) D’où la stabilité asymptotique en boucle fermée du système ( ... )e e1 n .
III.5 Commande par Backstepping adaptative [12]
La version adaptative du Backstepping offre une méthode itérative et systématique, qui permet, pour des systèmes non linéaires de tout ordre, de construire récursivement les trois parties indispensables à une commande adaptative basée sur Lyapunov :
- La loi de commande : permet de répondre aux spécifications désirées, quant au comportement du système à commander.
- La loi d'adaptation : détermine la dynamique d'estimation des paramètres inconnus. Elle doit garantir leur convergence vers leurs valeurs respectives, sans affecter le bon fonctionnement, surtout la stabilité, de l'ensemble.
32
- La fonction de Lyapunov : permet le choix adéquat des deux précédentes lois et garantit la convergence et la stabilité de la structure adaptative, en tout temps. La construction de ce triplet s'effectue simultanément. Les trois opérations sont entrelacées, ce qui permet de tenir compte des différents effets destructeurs, afin de préserver la stabilité du système, cette méthode traite deux aspects adaptatif et non adaptatif.
III.5.1 Approche adaptative
Les modèles réels des systèmes sont habituellement caractérisés par des paramètres (masse, inductances...) qui sont peu connus ou mal connu et qui dépendent d'un changement d'environnement. Il est donc nécessaire d'employer une loi d'adaptation pour estimer ces paramètres. Il s’agit d’élargir le principe de la commande Backstepping aux systèmes présentant ce genre de paramètres, dans ce cas l’algorithme de la commande doit contenir une loi d’adaptation pour ce genre de paramètres et loi de commande doit être décrite en fonction des estimées.
Soit le système : 1 1 ( ) ( ) ( ) ( ) ( ) i i i i i i n n n x x f x x x f x g x u x y x + = + + = + + = (III.28) Avec : •
1, ...2
T n nx= x x x le vecteur d’état globale. •
1, ...2
,1T
i i
x = x x x i n le vecteur d’état partiel. • u t ( ) l’entrée de système.
• y t ( ) sortie de système
• f xi( ) et ( )i g x fonctions non linéaires connus, où fi(0)=0 et ( )g x 0. • i( )xi les incertitudes du système.
Supposition : il existe des constantes inconnues > 0 et des fonctions non négatives i
connues i( ), xi i=1.2..., n tel que :
i( )xi i i( )xi (III.29)
Algorithme de commande :
Dans ce travail, on utilise la commande par Backstepping pour la conception de notre commande
33
Etape 1 :
On définit la première erreur comme suite :
1 1 1d
e = −x x (III.30) Donc la dérivée temporelle est :
1 1 1d 2 1( )1 1( )1 1d
e = −x x =x + f x + x −x (III.31) Si on choisit la commande de virtuelle :
2
2d 1 1 1 1d 1( )1 ˆ1 1( )1 1
x = = −k e +x − f x − x e (III.32) Avec est l’estimé du paramètreˆ1 . 1
La loi d’estimation de est donnée par : ˆ1
(
)
2 2
1 1( )x e1 1 ˆ1 10
=
−
− (III.33)10, 1 et 1
sont des paramètre de design, avec :est une valeur initiale de 10 . 1 Remplaçant (III.32) dans (III.31) on trouve que :
2
1 1 1 2 ˆ1 1( )1 1 1( )1
e = −k e + −e x e + x (III.34) Tel que :e2 =x2−1 est la deuxième erreur de poursuite.
On choisit la fonction de Lyapunov suivante :
2 2 1 1 1 1 1 1 1 1 1 ˆ , 2 2 v = e +
= − (III.35) La dérivée de cette fonction de lyapunov est donnée par :1 1 1 1 1 1 2 1 1 1 2 1 1 1 1 1 1 1 1 1 2 2 2 1 1 1 2 1 1 1 1 1 1 1 1 1 2 1 1 ˆ ( ) ( ) ˆ 1 ˆ ( ) ( ) ˆ v e e e k e e x e x k e e e x e x e = + = − + − + − − + − + − (III.36)
Prenant en considération l’équation (III.29), on trouve que :
2 2 2 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 2 1 ˆ ( ) ( ) ˆ v −k e +e e −