HAL Id: cel-02161121
https://hal.archives-ouvertes.fr/cel-02161121
Submitted on 20 Jun 2019
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Régulation
Eric Magarotto
To cite this version:
Page 1
Powerpoint Templates
Régulation
Eric Magarotto
eric.magarotto@unicaen.frIUT GC 2A
Page 2
ecampus.unicaen.fr/IUT Caen/…
DUT2/GCTE2211/S4/UE41/…
NGCM3306 (Régulation)
LACPrésentation, coordonnées
UCN : UFR des Sciences IUT ENSI ESIX E. MAGAROTTO Bât. Université Sci. 2 - 319,LAC EA 7478, team PaDiCoR, @ : eric.magarotto@unicaen.fr
: http://lac.unicaen.fr/membres
: 02-31-56-73-73
Page 3
Bibliographie
Page 4
Morale ?
Dear Students
I know when You’re
TEXTING
in class
Seriously, no one just looks
down at their crotch and smiles.
Sincerely, your teacher
(internet)
Page 5
Non ! Première notion -->
Page 6
La solution --> réguler
IUT GC 2A
6Imposer consigne …
objectif attendu :
être concentré sur les propos de l’enseignant
Page 7
Réguler --> performances ?
IUT GC 2A
7Conséquence ?
Au volant
Conséquence (bis) ?
En cours
Page 8
La solution --> réguler
IUT GC 2A
8Mauvaise performance (pas d’attention/de concentration)
Supprimer ce qui ne respecte pas la consigne (la perturbation)
Solution refusée par les étudiants !
Page 9
La solution --> réguler (bis)
IUT GC 2A
9Solution préférée des étudiants
Diminuer l’effet de la perturbation :
OK ! C’est mieux mais
…..
performances (seulement) atténuées (écran toujours visible)
donc l’attention/concentration est mauvaise
Page 10
La solution --> réguler (bis)
IUT GC 2A
10Cahier des charges :
Qu’est-ce qui est acceptable (en terme de performances) ?
i
d
é
a
l
Page 11
Objectifs
IUT GC 2A
11OBJECTIFS du cours
Être capable de :
Définir l’intérêt et les limites de la correction des
systèmes asservis
Mettre en évidence l’influence des corrections
sur les performances
choisir un correcteur et de régler ses paramètres en
fonction du cahier des charges du système étudié
Page 12
Introduction
Notions et outils (langage, T. Laplace, modélisation
Systèmes élémentaires
Performances (stabilité, précision, rapidité)
Correction (PID, stratégies et méthodes)
SNCC et automatismes
IUT GC 2A
12Page 13
300 < J.C. Grecs (temps) 800 – 1200 arabes 1600 –1900 révolution moulin 16ème 17temp. ème niveau 18ème pression 18ème
1800 –
1935 maths équa diff.
20ème régulation PID
WW2 Radar
1960 numérique temps réel coûts informatique
60-80 aéronautique Spatial
≥ 1980 high-tech Optim. commande robuste informatique
IUT GC 2A
13Page 14
Domaines
Cosméto. Agro. Environ-nement Energie Electrique Transports Pharmaco. Médical High-TechIUT GC 2A
14Domaines
Page 15
Une chaîne
de régulation
Un exemple :
IUT GC 2A
15Chaine d’acquisition
Page 16
IUT GC 2A
16Commande
• Signal de
commande :
sort/généré par
le correcteur
• « Entre » dans
l’actionneur
• Limites
physiques
Réglage
• Loi de
commande
(algorithme
(exemple PID)
• Correcteur (algo
+ écart)
• Signal d’erreur
en entrée
• Signal de
commande en
sortie
Mesure
• Acquisition des
signaux de
sortie du
système
• Capteurs :
délivrent une
valeur de
mesure
• Mise en forme
du signal
(transmetteur)
Chaine d’acquisition
Page 17
IUT GC 2A
17Page 18
IUT GC 2A
18Des capteurs …
de proximité
(à ultrasons) De niveau Bouton poussoir
d’humidité photoélectrique De gaz
De choc De contact D’arrêt d’urgence
Page 19
IUT GC 2A
19Des actionneurs …
Moteur
pas-à-pas 7 segmentsAfficheur Voyants
electrovanne Vérin (rotatif) ventilateur
buzzer Vérin (linéaire) Résistance chauffante
Page 20
IUT GC 2A
20Position du problème :
Beaucoup de technologie !
• Toutes différentes • Évolution rapide • À tous les prixBeaucoup de différences !
• Pas 2 systèmes identiques ?
• Performances attendues sont différentes
Nombreux outils !
• Scientifiques • Graphiques • Informatiques
Des incertitudes
• Variations dans le temps (usure ?) • Variations selon fonctionnement (?)
Page 21
IUT GC 2A
21Position du problème :
Page 22
IUT GC 2A
22Objectifs ?
Procédé
d’instrumentation
Plan
Modèle
Page 23
IUT GC 2A
23Modèle ?
Nécessité d’un modèle • LEQUEL ? • Pourquoi faire ? PB liés • 1 fonctionnement = 1 modèle Comment faire ? • Modèle général• Des classes ? Des familles ? Comment
l’obtenir ? • Physique (équations)
• Essais pratique (comportement) Nominal • OK mais
ensuite ?
Améliorati
ons ? • Quoi modifier ?• Paramètres globaux
En mode
Page 24
IUT GC 2A
24Page 25
IUT GC 2A
25Page 26
IUT GC 2A
26Exemple : niveau d’une cuve
Canalisation
de
soutirage
Canalisation
Page 27
IUT GC 2A
27Débit
de
soutirage
Débit
d’alimentation
• Incontrôlable
• Q Max
Doit s ’adapter au débit de soutirage
pour maintenir le niveau constant et
donc maintenir la réserve
Niveau à
maintenir pour
assurer la réserve
Page 28
IUT GC 2A
28Débit
de
soutirage
Débit
d’alimentation
Débit donné
Niveau à
maintenir pour
assurer la réserve
Si l ’alimentation est trop faible ...
Le niveau baisse
Danger !!!
Page 29
IUT GC 2A
29Débit
de
soutirage
Débit
d’alimentation
Débit donné
Niveau à
maintenir pour
assurer la réserve
Si l ’alimentation est trop forte ...
Le niveau monte
Danger !!!
Trop tard !!!
Page 30
IUT GC 2A
30Alimentation
Grandeur à
maintenir
Grandeur
de réglage
Perturbation
Sortie
Mesure
Commande
Consigne
Qs
Qa
h
80 %
Valeur à maintenir
objectif
Grandeur
incontrôlable
Soutirage
Page 31
IUT GC 2A
31Perturbation
Commande
Qs
Qa
h
Sortie
Capteur
Régulateur
Organe de
correction
Actionneur
Rétroaction
du procédé
Chaîne de régulation
Page 32
IUT GC 2A
32Les individus :
des appareils
Qs
Qa
h
LC
LV
LT
Le transfert d’informations :
électrique
Le support :
des fils
Le langage :
un courant
continu variant
de 4 à 20 mA
Page 33
IUT GC 2A
33Transfert d’informations
• Ne pas confondre avec grandeur physique (m, m3/h, °C, etc…)
• Ne pas confondre avec grandeur physique (m, m3/h, °C, etc…)
Signal normalisé
• Car tensions : chute selon distance
• Grande distances entre capteurs et actionneurs • Car tensions : chute selon distance
• Grande distances entre capteurs et actionneurs
Pourquoi un courant ?
• Faciliter le diagnostic de panne (0 mA = support rompu !) • Faciliter le diagnostic de panne (0 mA = support rompu !)
Pourquoi 4 mA ?
• Pas besoin de puissance pour transmettre les informations • Pas besoin de puissance pour transmettre les informations
Pourquoi 20 mA ?
• Blindage des câbles • Blindage des câbles
Page 34
IUT GC 2A
34Ca fonctionne mal ?
Pb physique
• Le capteur mesure mal
• L’actionneur n’exécute pas correctement la commande
Pb de calcul
• La loi de commande n’est pas adaptée (ou mal
calculée)
Pb de communication
• Physique (panne élément, bruit, rupture support)
Page 35
IUT GC 2A
35Notions et outils
Système / modèle BO / BF Laplace Schémas blocsPage 36
IUT GC 2A
36Position du PB :
Système : plusieurs caractéristiques entrées/sortiesrapidité/lenteur
: dynamique = temps pour
atteindre son régime permanent (= régime
équilibre).
amplification/amortissement
(du signal
appliqué à l'entrée) : généralement l'objectif à
atteindre/souhaité (sur la sortie)
agitation temporaire
(en transitoire, avant
d'atteindre son régime permanent) traduite
par des oscillations.
Page 37
IUT GC 2A
37Position du PB :
C’est
traduit
par:
temps de réponse
/ d'établissement : temps pour
lequel la (variation de) sortie atteint le valeur
d'équilibre (régime permanent) à 5% près (95% ou
105% si dépassement).
gain statique :
mesuré comme le ratio de la
variation de sortie sur la variation de l'entrée
(diverses possibilités : unité =1, amplificateur >1
ou amortisseur <1)
dépassement
(premier = le plus grand) : mesuré
(en transitoire) comme l'excédent au dessus de la
valeur finale (régime permanent) et exprimé en %.
Page 38
IUT GC 2A
38Position du PB (suite) :
A ces valeurs sont attachés des critères de
performance (rapidité, précision statique et
dynamique) et des contraintes (stabilité,
commande mesurée) en liens direct avec ceux de l'industrie (fiabilité, qualité, etc...).
Plus précisément, les critères process (duréee cycle de production, conformité, fiabilité, ) utilisent ces critères de performances.
ces valeurs sont fonctions de paramètres propres à chaque système : c'est un autre moyen de
représenter les systèmes : notion de modèle (mathématique, schéma, ordre, etc...)
Page 39
IUT GC 2A
39Position du PB (suite) :
POURTANT le procédé est bien "construit" ???
pas toujours (capteurs et actionneurs sous dimensionnés car changement d'objectifs dans le temps ou trop couteux)
pas tout le temps (usure qui modifie les capteurs actionneurs et même le process en lui-même)
il change (en fonction du point de fonctionnement choisi, des objectifs, ..)
ET SURTOUT :
il peut être perturbé par des signaux ou conditions externes (indésirables)
ses paramètres changent quand on ferme la boucle !!!
pour améliorer/optimiser une performance, souvent on dégrade les autres (apparition de compromis, de choix à faire selon ce que l'on veut, ce qu'on peut faire)
Page 40
IUT GC 2A
40Donc réguler c’est :
mesurer
réfléchir agir
•
Réfléchir
(Stratégie du régulateur : comparer, générer la
commande ou grandeur réglante)
•
Agir
(sur le système : actionneur)
Page 41
IUT GC 2A
41Améliorations attendues
Baisse des Coûts
(en place, en énergie, etc...)
Gain de temps
(rapidité)
Précision
(qualité)
Sureté, Fiabilité
(stabilité)
Poursuite
: suivi de consigne
Page 42
IUT GC 2A
422 objectifs simultanés
Pb : à assurer par le même organe (régulateur) !
Poursuite
: suivi de consigne (nominal)
Régulation
: rejet de perturbations (défauts)
Poursuite
aptitude d'un syst. à maintenir la sortie constante, cela malgré les perturbations externes au syst.
Régulation
aptitude d'un syst. à maintenir la sortie constante, cela malgré les perturbations externes au syst.
Page 43
IUT GC 2A
43Exemple : échangeur
- Températures d ’entrées constantes
Débit fluide
procédé
Sortie (T)
Débit fluide
utilitaire
Valeur normale
Consigne
Valeur nominale
Bonne régulation
Régulation
trop forte
Régulation
trop faible
Valeur nominale
Page 44
IUT GC 2A
44Une « bonne » régulation ?
Et c’est le réglage du régulateur qui permet d ’atteindre ces objectifs Seule la boucle (de régulation) FERMEE en est capable !!
Une trop grande inertie du procédé peut rendre la régulation inefficace ou pire (destructrice) •
sortie qui revient précisément à la consigne
•
idem en présence de perturbations
•
retour à la consigne le plus efficace possible :
o
sans oscillations (pompage) usure de la vanne
ole plus rapidement possible...
Page 45
Inertie
Débit fluide
procédé
Grandeur
réglée (T)
Débit fluide
utilitaire
Valeur normale
Valeur nominale
Consigne
Valeur nominale
La régulation en BF
a atteint une limite !
Une régulation plus COMPLEXE
doit être mise en place !
Exemple : échangeur (suite)
Page 46
Système : La réalité
Modèle : Image simplifiée du système
Modèle de connaissance
Mathématiques
Lois de la Physique
Régulation
Modèle de comportement Transformée de Laplace
Obtention (Laplace) d’un modèle simple mais utile (suffisant)
pour nos techniques
Conditions Initiales nulles
Fonction
Transfert
Espace de travail : domaine temporel
Essai Pratique
Système et modèle
Page 47
des systèmes :
Modèle (SISO)
Modèle : relation mathématique entrée/sortie
S
ingle
I
nput
Action d ’une entrée Réponse du système
Évolution de la sortie (causalité)
S
ingle
O
utput
Système et modèle : exemples
Page 48
Le langage :
IUT GC 2A
48• Entrée principale. Représente l’objectif attendu. • Entrée principale. Représente l’objectif attendu.
Consigne / référence
• Effectue la soustraction entre consigne et signal de mesure • Délivre le signal d’erreur
• Effectue la soustraction entre consigne et signal de mesure • Délivre le signal d’erreur
Comparateur / sommateur
• Calcule (grâce au réglage de ses paramètres) et délivre la commande • Calcule (grâce au réglage de ses paramètres) et délivre la commande
Correcteur
• Valeur qui permet au système de se comporter « correctement ». Attention
aux valeurs limites.
• Valeur qui permet au système de se comporter « correctement ». Attention
aux valeurs limites.
Commande /valeur réglante
• Entrée physique du procédé (amplificateur, pompe, vanne, etc…) • Entrée physique du procédé (amplificateur, pompe, vanne, etc…)
Actionneur
• Entrée indésirable. A minimiser ou rejeter • Entrée indésirable. A minimiser ou rejeter
Perturbation
• Sortie du procédé • Sortie du procédé
Sortie / valeur réglée
• Sortie du capteur (= entrée du régulateur en BF) • Sortie du capteur (= entrée du régulateur en BF)
Page 49
Des Maths ? Oui !
Quelles Maths ? Des Maths appliquées (donc simplifiées)
Transformée de Laplace
•
utilisation des tables (peu de calculs)
•
directe pour obtenir fonction de transfert
•
inverse pour équation temporelle des courbes
Fractions de polynômes
•
réduction au même dénominateur
•factorisation, extraction de variables !
Tracés de courbes et interprétations
•
limites en 0 et
•
fonctions du temps
Outils théoriques :
Page 50
TL
d’une fonction
Linéarité
Définition
TH Valeur Initiale
TH Valeur Finale
TH de Superposition
TH Retard
0 pte
)
t
(
f
)
p
(
F
f(t)
L
)
p
(
bG
)
p
(
aF
bg(t)
af(t)
L
)
0
(
f
)
p
(
pF
dt
df(t)
L
0
p t)
p
(
F
p
lim
)
t
(
f
lim
f(t
)
e
pF
(
p
)
L
0 p t)
p
(
F
p
lim
)
t
(
f
lim
''(
)
2(
)
(
0
)
'(
0
)
f
pf
p
F
p
t
f
L
LAPLACE : propriétés
IUT GC 2A
50Page 51
f(t)
F(p)
(t)
dirac1
1(t)
échelon amp 11 /
p
a(t)
échelon amp aa /
p
t
1 /
p
2t
nn! /
p
n+1e
-at1 /
p
+a
t
e
-at1 / (
p
+a)
2t
ne
-atn! / (
p
+a)
n+1
e at e bt
a b 1 1 / (
p
+a)(
p
+b)
2
t 2 e 1-z z -1 w 1 wt sin zw 1 / (
p
2+2zw
p
+w
2)LAPLACE : table
IUT GC 2A
51Page 52
LAPLACE : application
Page 53
Ordre : degré max du dénominateur
Pôle : racine (solution) du dénominateur
Représentation : fraction polynômiale sortie/entrée
notation : F(p) = NUM (p) / DEN (p)
indépendant amplitude et nature de l ’entrée
Entrées canoniques :
impulsion échelon rampe
Fonction de transfert :
Page 54
Sortie : f (t)
Statique - dynamique
Page 55
On réagit !
On subit !
BO (pas de régulation)
BF (régulation)
Boucle ouverte – fermée :
Page 56
Schéma PCF
(
P
lan de
C
irculation des
F
luides)
Vanne :
IUT GC 2A
56
Schéma techniques et plans
schéma faisant apparaître les appareils (cuves, échangeurs...), les organes de puissance (pompes, agitateurs...), la nature et sens d'écoulement des fluides, les grandeurs physiques utiles
Page 57
Schéma TI
(
T
uyauteries et
I
nstrumentation)
Vanne :
IUT GC 2A
57
Schéma techniques et plans
Schéma PCF instrumenté : complété par les appareils de mesure, les appareils de contrôle et de calcul, les actionneurs et les liaisons. Attention : en Anglais schéma PID (Piping
Instrument Diagram) Ne pas confondre avec « correcteur PID »
Page 58
Représentation Symbolique des
Procédés Industriels
Vanne :
IUT GC 2A
58
Page 59
Vanne :
IUT GC 2A
59
Page 60
exemple
Vanne :
IUT GC 2A
60
Page 61
IUT GC 2A
61Présentation du procédé
La fabrication de nombreux produits industriels nécessite généralement un conditionnement des différents fluides participant à la réaction chimique. Un four de préchauffage doit permettre d’élever un réactif à une température constante pour garantir un bon rendement de la réaction
Détermination des grandeurs
Grandeur réglée
T aval
(T° en aval du four de préchaffage) Grandeurs incidentes Grandeur réglante (commande) : Q gaz (débit de combustible) Perturbations : Q air (débit de comburant) T amont (T° du produit en amont du four) Q produit (débit de produit)Page 62
IUT GC 2A
62Page 63
Exemple
Gain
Comparateur
H = S / EIUT GC 2A
63Schémas fonctionnel détaillé
Page 64
IUT GC 2A
64Page 65
H = S / E
IUT GC 2A
65Page 66
Règle 1 : produit
Règle 2 : somme
Règle 3 : BF
IUT GC 2A
66Page 67
Règle 4 : déplacement de lien vers l ’avant
Règle 5 : déplacement de lien vers l ’arrière
IUT GC 2A
67Page 68
IUT GC 2A
68Systèmes élémentaires
ORDRE 1 ORDRE 2 ORDRE > 2Page 69
Tout système régi par une équation
différentielle d’ordre 1 à coefficients constants
)
t
(
Ke
)
t
(
s
dt
)
t
(
ds
T
)
p
(
KE
)
p
(
S
)
p
(
pS
T
L + CI=0
1p
.
T
1
K
)
p
(
E
)
p
(
S
)
p
(
F
gain statique
constante de temps
forme standardordre 1
2 paramètres
caractéristiques
•gain statique
: gain en régime permanent
•constante de temps
: en secondes vitesse de réaction (dynamique)
e
s
)
(
e
)
(
s
K
IUT GC 2A
69ORDRE 1 : définition
Page 70
F(p)
T / te
T
K
)
t
(
s
1 ) ( p EIUT GC 2A
70ORDRE 1 : impulsion
Page 71
Influence de K
IUT GC 2A
71ORDRE 1 : impulsion
Page 72
F(p)
1
e
t/T
K
)
t
(
s
p
p
E
(
)
1
IUT GC 2A
72ORDRE 1 : échelon
Page 73
IUT GC 2A
73ORDRE 1 : échelon
Page 74
1
e
t
/
T
K
)
t
(
s
K
)
t
(
s
lim
t
0
T
K
dt
)
t
(
ds
lim
0 t
Asymptote horizontale
Th Valeur Initiale Temps de réponse (à 5%)
e
K
K
t
s
(
r)
1
tr /T
0
.
95
Th Valeur FinaleTangente non-horizontale
T
t
r
3
IUT GC 2A
74Page 75
La sortie ne débute
pas forcément à « 0 »
POINT de FONCTIONNEMENTIUT GC 2A
75ORDRE 1 : réponse indicielle
Remarque TRES importante !
Temps de réponse (à -5% = +95% de S/E)
T
t
r
3
Page 76
F(p)
t
T
Te
t /T
K
)
t
(
s
21
)
(
p
p
E
IUT GC 2A
76ORDRE 1 : rampe
Page 77
Système intégrateur (sans
régime permanent)
Système retardé (de
)
Système du premier ordre
généralisé
p
T
e
K
p
F
p.
1
)
(
p
T
/
K
)
p
(
F
p
.
T
1
)
p
1
(
K
)
p
(
F
)
(
t
T
K
)
t
(
s
ind
.
rep
)
(
T
K
)
t
(
s
imp
.
rep
rampe
constante
IUT GC 2A
77Page 78
Tout système régi par une équation différentielle d ’ordre 2 à coefficients constants
)
(
)
(
)
(
2
)
(
2 2 2 2t
e
Kw
t
s
w
dt
t
s
d
zw
dt
t
s
d
)
(
)
(
)
(
2
)
(
2 2 2p
E
Kw
p
S
w
p
S
p
zw
p
S
p
2 2 22
)
(
)
(
)
(
w
p
zw
p
Kw
p
E
p
S
p
F
→ K : gain statique → z : facteur d ’amortissement→ w : pulsation propre (rad/s)
1
2
2
p
p
p
p
Kw
Forme factorisée
Forme standard
IUT GC 2A
78ORDRE 2 : définition
3 paramètres caractéristiques
Page 79
Équation caractéristique (DEN) p2 + 2zw p + w2 = 0
discriminant = 4w2 ( z2-1 )
z ?
z 1 (0)
z < 1 (<0)
pôles
2 2 2 1 2 1 1/T 1 z w zw p 1/T 1 z w zw p 2 réels 2 2 2 1 z -1 jw zw p z -1 jw zw p 2 complexesTout dépend de « z » : z
1 (2 réels), z<1 ( 2 complexes)QUELLE(S) DIFFERENCE(S)/CONSEQUENCE(S) ?
z 1 : non-oscillant (apériodique)
z < 1 : oscillatoire-amorti (pseudo-périodique)
IUT GC 2A
79Page 80
z > 1 : non-oscillant (apériodique)
z = 1 : non-oscillant (apériodique critique)
z < 1 : oscillatoire-amorti (pseudo-périodique)
T2 t 1 T t 2 1 1 2 1 e e T T K ) t ( s ) pT 1 )( pT 1 ( K ) p ( SL
T0 t 2 0 1 2 0 e t T K ) t ( s ) pT 1 ( K ) p ( SL
w z t
e z Kw t s w p zw p Kw p S zwt 2 2 2 2 2 1 sin 1 ) ( 2 ) ( 1 L
oscillant (sinus) amorti (exp)
pseudo-période :
p w 1 z22 T
IUT GC 2A
80Page 81
s
0= 0
s(
) = 0
s ’(t) = 0
max (t 0)
IUT GC 2A
81ORDRE 2 : impulsion
Page 82
z > 1 : non-oscillant (apériodique)
z = 1 : non-oscillant (apériodique critique)
z < 1 : oscillatoire-amorti (pseudo-périodique)
T2 t 2 1 T t 1 2 1 1 2 1 e T e T T T 1 1 K ) t ( s ) pT 1 )( pT 1 ( p K ) p ( SL
T0 t 0 1 2 0 e T t 1 1 K ) t ( s ) pT 1 ( p K ) p ( SL
e
sin
w
1
z
t
z
1
1
1
K
)
t
(
s
)
w
p
zw
2
p
(
p
Kw
)
p
(
S
zwt 2 2 1 2 2 2L
2 picz
1
w
k
t
0
)
t
(
s
2 1 1100
)
(
)
(
100
%
z z pice
s
s
s
D
IUT GC 2A
82ORDRE 1 : échelon
Page 83
w
z
t
r
3
2 p z 1 w 2 T 2 1 1 z ze
D
2 pic z 1 w t IUT GC 2A
83ORDRE 2 : Indicielle (pseudo)
w z 6 tr
Page 84
w z 6 tr w
z
3
t
r
« w » rapidité
« z » dépassement
apériodique pseudo-périodiquecritique
apériodique
pseudo-périodique
•s() = K . e(t) •s ’(0) = 0 tangente horiz. •point inflexionIUT GC 2A
84ORDRE 2 : indicielle
Page 85
« w » apériodique
« z » pseudo-pér.
IUT GC 2A
85Page 86
e sinw 1 z t 2 z 1 w 1 w z 2 t K ) t ( s zwt 2 2 ) w p zw 2 p ( p Kw ) p ( S 2 2 2 2 L
-1
s0 = 0 s() 0 s ’(0) = 0 tangente horizontale erreur de traînage : K = 1 e() - s() = 2z / w K 1 e() - s() = IUT GC 2A
86ORDRE 2 : rampe
Page 87
IUT GC 2A
87Page 88
Etude d ’un système d ’ordre 3
erreur en transitoire
) 22 p ( ) 6 p ( ) 1 p ( 22 6 ) p ( F3 ) 6 p ( ) 1 p ( 6 ) p ( F2 F
3- F
1F
3- F
2pôle dominant : -1
2 pôles : -1, -6
3 pôles : -1, -6, -22
F1 F2 F3pôle rapide
) 1 p ( 1 ) p ( F1 pôle lent
IUT GC 2A
88ORDRE > 2 : exemple
Page 89
IUT GC 2A
89Performances
Stabilité Précision RapiditéPage 90
Toutes les performances en même temps
Compromis !!!
Difficile (voire impossible)
IUT GC 2A
90Performances
Poursuite (nominal)
• Suivi de consigne
• Précis, rapide, stable
Régulation (défaut)
• Rejet de perturbation
• Précis, rapide, stable
commande
• Amplitude limitée
• Éviter saturation
des actionneurs
• Ralentit le système
• Aucune correction
pendant la durée
de saturation
Page 91
notion (équilibre vs stabilité locale)
stabilité : définition
• au sens strict (asymptotique, Lyapunov) : retour à l’équilibre après
perturbation ou changement de consigne. Instable si écartement ou
non-retour
• au sens large (EBSB) : (signaux)
E
ntrée
B
ornée
S
ortie
B
ornée
(limitée, non-divergente). Attention à la saturation des actionneurs
qui peut faire penser à une sortie bornée
faux
équilibre neutre (nouvel équilibre)
équilibre stable
équilibre instable
IUT GC 2A
91Page 92
Système asymptotiquement stable ssi: g(t) = réponse impulsionnelle du système représenté par (après décomposition en éléments simples) :
j j j j j i i i k k kc
b
p
p
p
p
d
p
p
G
2 2)
(
)
(
• pi les pôles réels• cj ± i bj les pôles imaginaires
j j j t b j i t p i k k k d e f e c t t g( )
i j cos(
)g(t) converge vers 0 si les pi et les bj sont tous strictement négatifs !!!
Un système linéaire invariant est stable
si tous ses pôles sont à partie réelle strictement négative 0 ) ( g t Lim t
IUT GC 2A
92Stabilité : démonstration
Page 93
IUT GC 2A
93Page 94
IUT GC 2A
94Page 95
Plan complexe
0 Re(p) 0 Re(p) Stable
Instable
pôle stable : Re(p) < 0
système stable : tous les pôles stables pôle instable : Re(p) 0
système instable : un seul pôle instable suffit !
IUT GC 2A
95Page 96
allures des réponses versus
localisation des pôles
pôle instable : Re(p) > 0 système instable : un seul pôle instable suffit
IUT GC 2A
96Page 97
Et pour un système BF ?
résoudre polynôme caractéristique difficile pour ordre > 2 !!! C(p) + G(p) E(p) U(p) S(p)
)
(
)
(
1
)
(
)
(
)
(
p
G
p
C
p
G
p
C
p
F
0 ) ( ) ( 1C p G p polynôme caractéristique UNE SOLUTION !Routh = méthode algébrique : analyse d ’un tableau
Pour un système BO
« facile » : DEN (G(p)) stable si Re(p
i) < 0
IUT GC 2A
97Page 98
0
1
2
2
1
-n
1
-n
n
n
p
a
p
a
p
a
p
a
a
p
na
na
n-2a
n-4…
p
n-1a
n-1a
n-3a
n-5…
p
n-2b
nb
n-1b
n-2…
p
n-3c
nc
n-1c
n-2…
p
0h
n > 0IUT GC 2A
98Routh : construction tableau
Page 99
Calcul des éléments du tableau (b
n, c
n, ...)
p
na
na
n-2p
n-1a
n-1a
n-3p
n-2b
nb
n-1p
n-3c
nc
n-1
p
0h
np
na
na
n-2a
n-4p
n-1a
n-1a
n-3a
n-5p
n-2b
nb
n-1b
n-2p
n-3c
nc
n-1c
n-2
p
0h
nConclusion
nombre de pôles instables
= nombre
changements de signes
dans colonne principale (jaune)
IUT GC 2A
99Page 100
IUT GC 2A
100Page 101
IUT GC 2A
101Page 102
IUT GC 2A
102Page 103
IUT GC 2A
103Page 104
IUT GC 2A
104Page 105
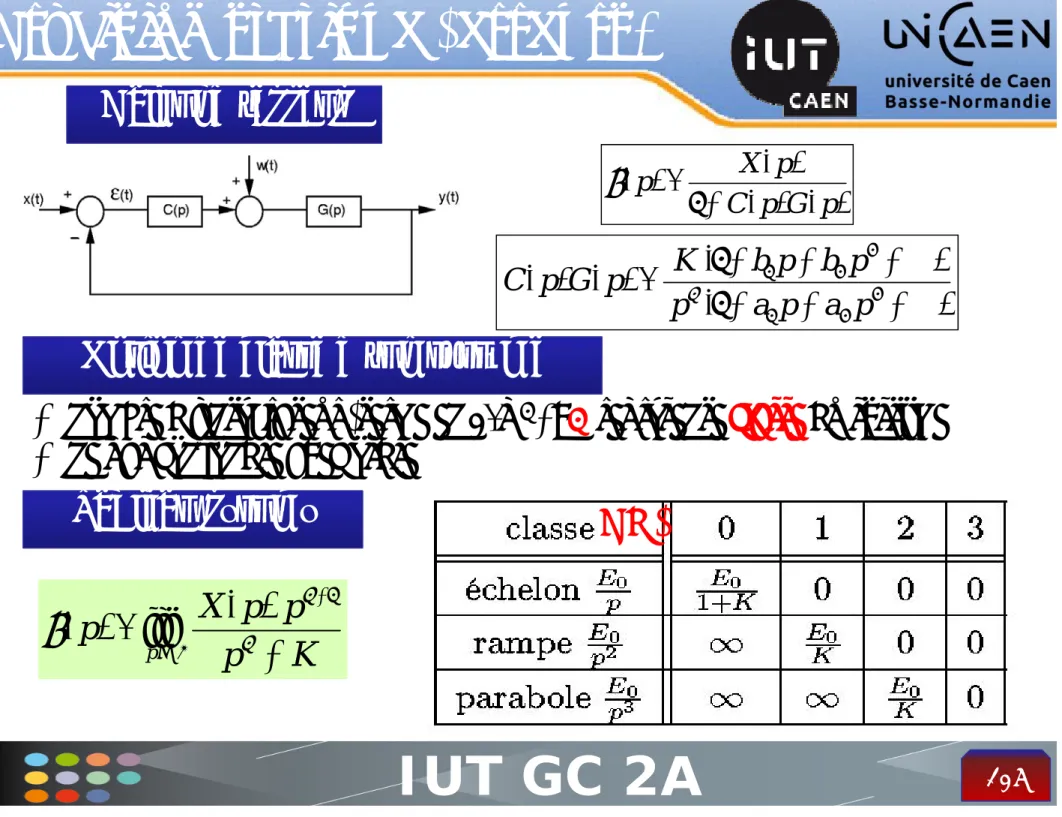
Calcul d ’erreur
Notion de classe d ’un système
Tableau résumé
nombre d ’intégrateur (terme en 1/p
) :
représente
classe
du système
ne pas confondre avec ordre !
) ( ) ( 1 ) ( ) ( p G p C p X p
K
p
p
p
X
p
p
1 0)
(
lim
)
(
)
1
(
)
1
(
)
(
)
(
2 2 1 2 2 1
p
a
p
a
p
p
b
p
b
K
p
G
p
C
IUT GC 2A
105Précision statique (erreurs)
Page 106
IUT GC 2A
106Page 107
IUT GC 2A
107Page 108
IUT GC 2A
108Page 109
G1 : classe 0 G2 : classe 1 G1 : classe 1 G2 : classe 0
rejet
erreur statique
IUT GC 2A
109Précision : classe en rejet
Page 110
G1 : classe 0 G1 : classe 1 G1 : classe 1 G2 : classe 0
erreur statique
erreur infinie (divergence)
IUT GC 2A
110Précision : classe en rejet
Page 111
Même règle mais :
Intégrateur doit être situé avant
(en regardant depuis l’entrée dans le sens des flèches) le point d’application de la perturbation
(dans C si perturbation de commande)
pour erreur nulle : autant d’intégrateur dans CG que la classe du signal entrée
– échelon (a/p, classe 1) 1 intégrateur – rampe (a/p2, classe 2) 2 intégrateurs
régulation (rejet de perturbation)
poursuite (suivi de consigne)
IUT GC 2A
111Page 112
IUT GC 2A
112Page 113
rapidité : position des pôles (abscisse)
dépassement (précision « dynamique ») : position des pôles (angle)
IUT GC 2A
113Page 114
Pourquoi boucler ?
Modification de la dynamique initiale atteindre et/ou améliorer objectifs de
performances
Conséquences du bouclage
Risque de déstabilisation Calculs plus compliqués Instrumentation
Performances améliorées
(précision statique et dynamique, rapidité, etc…)
Système Muscles Perturbations Cerveau Sens ObjectifIUT GC 2A
114bouclage
Page 115
pour tout assurer/respecter
en même temps ?
Correction P-I-D
Des méthodes de réglages ?
dans la suite …
3 actions :
P : proportionnel
I : intégral
D : dérivé
Calculs
Essais Pratiques
IUT GC 2A
115Des solutions ?
Page 116
IUT GC 2A
116Corrections
PID Stratégies MéthodesPage 117
Comment agir ?
POURSUITE (suivi de consigne)
•diminuer signal erreur feedback négatif
•amplifier signal erreur augmenter effet et rapidité de la prise en compte REGULATION (rejet de perturbation)
• composition des actions du correcteur introduire intégrateur (s) ?
Correcteur Actionneur Procédé Capteur
Mesure Mesurande Action Commande Consigne Perturbations + -Régulateur
IUT GC 2A
117Correction
Page 118
Le principe
commande de 2 états
•max 100 % action (si supérieur : diminuer action)
•min 0 % action (si inférieur : augmenter action)
Seuils (pour éviter
saturation actionneurs)
• seuil +
•seuil –
Problèmes
•Pompage (oscillations entretenues)
•Lenteur
•Précision limitée (erreur jamais nulle)
T°(t) t Puiss chauffe Consigne Seuil -Seuil +
IUT GC 2A
118Correction TOR
Page 119
a posteriori / feedback / mode
« automatique » sur les régulateurs
Son rôle
•Annuler l’écart (consigne-mesure)
•Rendre la sortie égale (à 5% près) à la consigne en régime permanent •Réduire ou annuler l’influence des perturbations
Ses contraintes
•Limiter la commande •Être stable
•Agir le plus rapidement possible (en poursuite et en régulation) •Tolérer des dépassements faibles
Correcteur Actionneur Procédé Capteur
Mesure Mesurande Action Commande Consigne Perturbations + -Régulateur
IUT GC 2A
119Correction : BF posteriori
Page 120
Améliore rapidité
Détériore précision dynamique (oscillations pour ordre 2, aussi perte de stabilité) Précision statique imparfaite
IUT GC 2A
120Correction PID : « action P »
Action la plus classique
La correction se fait en fonction de la différence entre la mesure et la consigne courante
Rapport erreur/commande = gain Bande proportionnelle = 1/gain
Pb : erreur petite = petit gain voire nul ! Pb : si consigne varie rapidement (entre 2 instants de mesure)
Page 121
Le principe
La structure générale
IUT GC 2A
121Page 122
1
1
)
(
AK
AK
W
0
1
1
)
(
AK
Avec un système de classe 0
)
1
/(
AK
•Erreur position (statique) :
•Erreur traînage (statique) :
•Erreur régulation (perturbation) :
•Rapidité :
)
(
IUT GC 2A
122Page 123
0
)
(
Avec un système de classe 1
0
)
(
W
•Erreur position (statique) :
•Erreur traînage (statique) :
•Erreur régulation (perturbation) :
AK
/
1
)
(
IUT GC 2A
123Page 124
Améliore rapidité (dépendant de D1%) Détériore précision dynamique (D1 %) Précision statique parfaite (pour échelon) Rejet parfait aussi si action avant pert.
IUT GC 2A
124Correction PID : « action I »
La correction utilise la mémoire des écarts entre la mesure et la consigne courante lors des
échantillonnages précédents
Élimine erreurs trop petites (pour corr. P) Élimine erreurs de suivi de consigne en pente Chaque Ti sec, on ajoute la valeur de l’entrée de l’intégrateur avec l’ancienne valeur
Réglage de n = /Ti
Pb : saturation d’intégrale (amplification à l’infini de sa contribution)
Pb : déstabilisation (fonction de la classe) Pb : commande oscillante avant désaturation
Page 125
Le principe
La structure générale
IUT GC 2A
125Page 126
Avec un système de classe 0
0
)
(
W
Erreur position (statique) :
Erreur traînage (statique) :
Erreur régulation (perturbation échelon) :
0
)
(
0
)
(
IUT GC 2A
126Correction PID : « PI »
Page 127
Avec un système de classe 1
0
)
(
W
Erreur position + traînage (statique) :
Erreur régulation (perturbation) :
Attention stabilité !!
0
)
(
IUT GC 2A
127Correction PID : « PI »
Page 128
Résultats : réponse indicielle (1) : =1, K
IUT GC 2A
128Correction PID : « PI »
I
T
Page 129
Résultats : réponse indicielle (2) : =2, K
IUT GC 2A
129Correction PID : « PI »
I
T
Page 130
Résultats : réponse indicielle (3) : K=1,
IUT GC 2A
130Correction PID : « PI »
I
T
Page 131
•Améliore précision dynamique
•Améliore stabilité (et tend à compenser le retard) •Aucune action sur précision statique
•Commande agitée (dangereux pour actionneur)