Ministère de l’enseignement supérieur et de la recherche scientifique
Université 8Mai 1945 – Guelma
Faculté des sciences et de la Technologie
Département d’Electronique et Télécommunications
Mémoire de fin d'étude
pour l’obtention du diplôme de Master Académique
Domaine : Sciences et Technologie
Filière : Electronique
Spécialité : Instrumentation
Restauration des profils en profondeur de l'analyse SIMS par
l'algorithme de Landweber
Présenté par :
---
Rahma Mentseur
---
Sous la direction de :
Dr . Fayçal Boulsina
Juillet 2019
En préambule à ce mémoire je remercie ALLAH de m'avoir aider et donner la patience et le courage d’accomplir ce modeste travail.
Je voudrais adresser toute ma gratitude et ma reconnaissance à mon encadreur Dr. BOULSINA FAYCAL, pour sa patience, sa disponibilité et surtout ses judicieux
conseils, qui ont contribué à alimenter ma réflexion.
Je souhaite adresser mes remerciements les plus sincères a monsieur HOUFAR Khamis, pour l’aide et le temps qu’il m’a consacré.
Mes vifs remerciements vont également aux membres du jury pour l’intérêt qu’ils ont porté à mon travail en acceptant de l’examiner et de l’enrichir par leurs propositions.
Je m'adresse mes plus sincères remerciements à tous mes proches et amies, qui m’ont toujours encouragées au cours de la réalisation de ce mémoire.
Je prends aussi un réel plaisir à remercier tout particulièrement mes parents et frères pour leurs soutiens inconditionnels. Ils ne cessent de m'encourager.
Je tiens à exprimer ma plus profonde reconnaissance à Mon mari pour sa patience, son réconfort et son affectueux soutien quotidien à l’égard de mes travaux.
Résumé
La spectrométrie de masse des ions secondaires (SIMS) est une importante technique pour la réalisation des profiles en profondeur. Cependant les développements SIMS ne sont pas aussi prononcés et rapides que ceux des techniques de fabrication de la microélectronique. De plus, l’analyse SIMS, de par son principe, implique un élargissement et décalage des profils mesurés vers la surface.
Ce travail était consacré à l’amélioration de la résolution en profondeur de l’analyse SIMS au moyen d’une technique de déconvolution. Pour effectuer la déconvolution, nous avons choisi d’utiliser l’algorithme de Landweber projeté (Projected Landweber algorithm). La déconvolution des profils gaussiens et en créneaux nous a montré que cet algorithme est semi-convergent. Cette propriété ne représente pas un vrai problème dans le cas des profils créneaux puisque la convergence est très lente, et le minimum de l’erreur se trouve généralement dans une région plate. Les profils déconvolués nous a montré une amélioration très satisfaisante de la résolution en profondeur, le décalage et l'élargissement des profils sont corrigés.
Mots-clés : SIMS, profils en profondeur, microélectronique, résolution en profondeur,
déconvolution, semi-convergence.
Abstract
Secondary Ions Mass Spectrometry (SIMS) is an important technique for the realization of depth profiles. However, SIMS developments are not as pronounced and fast as those of microelectronic fabrication techniques. In addition, the SIMS analysis, by its principle, leads to abroadening and shift of the measured profiles towardsthe surface.
This work was dedicated to improve the depth resolution of the SIMS analysis by using a deconvolution technique.To perform the deconvolution, we chose to use the Projected Landweber algorithm. The deconvolution of Gaussian and thick-layer profiles showed that this algorithm presents a semi-convergence property. This does not represent a real problem in the case of thick-layer profiles because the convergence is very slow, and the minimum of the error is usually in a flat region. The deconvolved profiles showed a very satisfactory improvement of depth resolution, the shift and broadening of the profiles are corrected.
Keywords: SIMS, depth profiles, microelectronic, depth resolution, deconvolution,
semi-convergence.
صخلم
فايطم ةلتكلا تانويلأل ةيوناثلا (SIMS) يه ةينقت ىلع ةجرد ةيلاع نم ةيمهلأا لوصحلل ىلع لا تاسايق يف قمعلا . نكل لا تاروطت ىلع ىوتسم SIMS تسيل سفنب ىوتسم كلت ةلصاحلا يف تاينقت لا عينصت يف لا وركيام كينورتكلإ . ةفاضلإاب ىلإ ،كلذ ليلحتلا SIMS ، نم ثيح ،أدبملا يدؤي ىلإ عسوت و تاسايقلا ةحازإو وحن حطسلا . اذه لمعلا صصخم نيسحتل لا تاسايق يف قمعلا مادختساب ةينقت يسكعلا لكاشتلا . ذيفنتل ةيلمع لكاشتلا يسكعلا ، انرتخا مادختسا ةيمزراوخ Landweber . قيبطت لكاشتلا يسكعلا ىلع تاسايق ةيسواغ و تاسايق تاقبطل ةكيمس رهظأ نأ هذه ةيمزراوخلا هبش ةبراقتم . لا لثمت هذه ةيصاخلا ةلكشم ةيقيقح يف ةلاح تاقبطلا ةكيمسلا نلأ براقتلا نوكي اًئيطب ،ةياغلل ةميقلاو ىرغصلا أطخلل دجاوتت ًةداع يف ةقطنم ةحطسم نم ىنحنم أطخلا . ترهظأ انل ةيلمع يسكعلا لكاشتلا انسحت ايضرم ،ةياغلل ذإ مت حيحصت ةحازإ و عسوت تاسايقلا . تاملكلا ةيحاتفملا : SIMS ، لا تاسايق يف قمعلا ، وركيام كينورتكلإ ، ةقد لا سايق ، لكاشتلا يسكعلا ، هبش لا براقتSOMMAIRE
1 INTRODUCTIONGENERALE 2 1. INTRODUCTION 2 2. SPECTROMETRIE DE MASSE D’IONS SECONDAIRES (SIMS)2 2.1. Principe
3 2.2. Description de l’analyseur ionique
5 2.3. Profil en profondeur 5 2.4. Résolution en profondeur 5 2.5. Le mixage collisionnel 7 2.6. La rugosité 7 3. POSITON DU PROBLEME 8
4.AMELIORATION DE LA RESOLUTION EN PROFONDEUR PAR
DECONVOLUTION
8 4.1 . Modélisation de l’analyse SIMS par convolution
9 4.2. Déconvolution des profils SIMS
9 4.2.1. Problème inverse mal posé
9 4.2.2. Régularisation d’un problème mal posé
10 4.2.3.Réponse impulsionnelle (Fonction de résolution en profondeur DRF)
12 4.2.4. Contraintes dures appliquées à un signal
14 4.2.5. Algorithme de Landweber projeté (Projected Landweber algorithm)
15 4.2.6. Calcul des erreurs
16 5. CONCLUSION 17 1. INTRODUCTION 17 2. BRUIT SIMS 17 2.1. Différents types de bruit
Chapitre 1: Généralités sur l'analyse SIMS et la déconvolution
17 18 2.1.1. Caractéristiques fréquentielles
2.1.2. Caractéristiques probabilistes
19 2.2. Nature du bruit SIMS
19 3. SIGNAUX-TYPES UTILISES POUR LES SIMULATIONS
19 3.1. Gaussienne 20 3.2. Créneau 20 3.3. Delta-Dopage 20 4. PROCEDURE DE SIMULATION 22 5. SIMULATION DES PROFILS SIMS
33 6. CONCLUSION
34 1. INTRODUCTION
34 2. DECONVOLUTION DES PROFILS SIMULES
52 3. CONCLUSION 53 CONCLUSION GENERALE 55 REFERENCES
3 4 6 8 21 22 23 24 26 27 28 30 31 32 35 36 Figure (1-1): Schéma de principe de l’analyse par SIMS.………...……….…..…. Figure (1-2): Schéma de l’analyseur ionique CAMECA IMS 6f…….………...…….. Figure (1-3): Principe du mixage collisionnel…….…………..……….…..…... Figure (1-4): Schéma montrant l’élargissement et le décalage des profils après leur analyse
par SIMS A) delta dopage B) profil rectangulaire (créneau)………....
Figure (2-1): Procédure de simulation sous MATLAB………..………. Figure (2-2): DRF analytique du modèle MRI tracé pour: w = 2,3 nm, σ = 1,4 nm,
λ = 0,3 nm, z0 = 7 nm et zi = 0 nm……….
Figure (2-3): Simulation d’un profil gaussien de σ = 4 nm . A) SNR = 30 dB . B) SNR = 40 dB..………...
Figure (2-4): Simulation d’un profil gaussien de σ = 12 nm . A) SNR = 30 dB . B) SNR = 40 dB…………...……….…...
Figure (2-5): Simulation d’un profil créneau de 4 nm de largeur. A) SNR = 30 dB . B) SNR = 40 dB……….………..
Figure (2-6): Simulation d’un profil créneau de 30 nm de largeur. A) SNR = 30 dB . B) SNR = 40 dB. ……….………
Figure (2-7): Simulation d'un profil d’un delta dopage de 0.3 nm de
largeur……….………..
Figure (2-8): Simulation de deux deltas-dopage séparés d’une distance d = 2 nm . A) SNR = 30 dB. B) SNR = 40 dB………. ..………...
Figure (2-9): Simulation de deux deltas-dopage séparés d’une distance d = 8 nm . A) SNR = 30 dB. B) SNR = 40 dB. ………...
Figure (2-10): Simulation de deux deltas-dopage séparés d’une distance d = 30 nm . A) SNR = 30 dB. B) SNR = 40 dB. ………
Figure (3-1): DRF analytique du modèle MRI tracé pour: w = 2,3 nm, σ = 1,4 nm, λ = 0,3 nm, z0 = 7nm et zi = 0 nm………...
Figure (3-2): Comportement de semi-convergence….………
37 38 40 42 43 45 46 48 49 50 51
Figure (3-3): Déconvolution d'un profil gaussien de σ = 2 nm. A) SNR = 30 dB . B) SNR = 40 dB ………...
Figure (3-4): Déconvolution d'un profil gaussien de σ = 5 nm . A) SNR = 30 dB . B) SNR = 40 dB………..……….
Figure (3-5): A) Evolution de l’erreur vraie en fonction du nombre d’itérations. B) Vecteur
de l’erreur vraie (après nopt itérations).C) Évolution de l’erreur de reconstruction (Ere) en fonction du nombre d’itérations. Cas du profil gaussien. ………
Figure(3-6): Déconvolution d’un profil créneau de 5 nm largeur. A) SNR = 30 dB. B) SNR = 40 dB………...
Figure (3-7): Déconvolution d’un profil créneau de 20 nm largeur A) SNR = 30dB. B) SNR = 40 dB………...
Figure (3-8): A) Evolution de l’erreur vraie en fonction du nombre d’itération.
B) Vecteur de l’erreur vraie (après nopt itérations).C) Évolution de l’erreur de reconstruction (Ere) en fonction du nombre d’itérations. Cas de profil créneau....…...
Figure (3-9): Déconvolution d'un profil d’un delta dopage de 0.3 nm de
largeur……….………..
Figure (3-10): A) Evolution de l’erreur vraie en fonction du nombre d’itérations. B)
Vecteur de l’erreur vraie (après nopt itérations).C) Évolution de l’erreur de reconstruction (Ere) en fonction du nombre d’itérations. Cas d'un profil d'un delta-dopag……….
Figure (3-11): Déconvolution de deux deltas-dopage séparés d’une distance d = 2 nm. A) SNR = 30 dB. B) SNR = 40 dB. ……….………...
Figure (3-12): Déconvolution de deux deltas-dopage séparés d’une distance d = 8 nm. A) SNR = 30 . dB. B) SNR = 40 dB ...
Figure (3-13): Déconvolution de deux deltas-dopage séparés d’une distance d = 30nm. A) SNR = 30 dB. B) SNR = 40 dB. ……….………...
Tableau 1: Nombre optimal des iterations nopt . Cas des profils gaussiens……….
Tableau 2 : Nombre optimal des iterations nopt . Cas des profils créneaux………….……...
36 41
1
INTRODUCTION GENERALE
La spectrométrie de masse des ions secondaires (SIMS) est une importante technique pour la réalisation des profiles en profondeur. Cependant les développements SIMS ne sont pas aussi prononcés et rapides que ceux des techniques de fabrication des matériaux de la microélectronique. Additionnant à cet effet que la mesure SIMS, de par son principe, implique un élargissement et décalage des profils mesurés vers la surface, même en utilisant les appareils les plus précis et dans les meilleures conditions expérimentales. Ainsi, l’amélioration de la résolution en profondeur de l’analyse SIMS passe pour l’instant par l’utilisation des techniques de traitement du signal.
Ce travail sera consacré à la restauration des profils SIMS au moyen d’une technique de deconvolution. Il est organisé comme suit:
Dans un premier chapitre, après une description de la technique d’analyse par SIMS, nous aborderons l’analyse en profondeur, ensuite nous exposerons une solution pour l'amélioration de la résolution en profondeur : Déconvolution des profils SIMS par une méthode itérative.
Le deuxième chapitre est consacré à la simulation des signaux typiques rencontrés SIMS : gaussiens, créneaux et deltas-dopage.
Enfin, le troisième et dernier chapitre est consacré à la déconvolution des signaux simulés dans le chapitre 2 en appliquant la méthode itérative.
Chapitre1
Généralités sur l'analyse SIMS et la
déconvolution
2
1. INTRODUCTION
La spectrométrie de masse des ions secondaires (SIMS) est une technique d'analyse de surface et de couches minces avec une sensibilité excellente. La technique SIMS se base sur la detection des ions secondaires émis par la surface bombardée avec des ions primaires.
Dans ce premier chapitre, après une description de la technique d’analyse par SIMS, nous aborderons l’analyse en profondeur, l’aspect qui nous intéresse dans ce travail. Nous nous attacherons aux phénomènes physiques qui gouvernent l’analyse SIMS (mixage collisionnel, rugosité) et qui conduisent à la dégradation de la résolution en profondeur. Enfin, nous exposerons une solution pour l'amélioration de la résolution en profondeur : Déconvolution des profils SIMS par une méthode itérative.
2. SPECTROMETRIE DE MASSE D’IONS SECONDAIRES (SIMS)
2.1. principe
Le principe de l’analyse par SIMS est simple : il consiste à éroder progressivement et très lentement un échantillon au moyen d’un faisceau d’ions, et d’étudier la nature ainsi que la quantité des espèces chimiques présentes dans cet échantillon et qui ont été éjectées par l’érosion. Le faisceau d’ions incidents est dit primaire, par comparaison avec le faisceau d’ions secondaires provenant de l’échantillon analysé. Le bombardement de l’échantillon par les ions primaires induit une émission de diverses particules (électrons, photons, atomes et molécules neutres, ions mono et polyatomiques). Les ions secondaires émis constituent l’information recherchée. Ils sont accélérés par une tension d’extraction, triés en énergie grâce à un champ électrostatique puis triés en masse par un champ magnétique, et enfin comptés [1].
La discrimination entre les différentes espèces pulvérisées est faite selon le rapport de leur masse sur leur charge. Ceci nous permet d’avoir des informations sur la composition de l’échantillon. Le principe général de l’érosion et de l’émission des ions secondaires est schématisé sur la figure (1-1) .
3
Figure (1-1) : Schéma de principe de l’analyse par SIMS [1].
Quatre points à retenir à propos de la technique SIMS :
Il s’agit d’analyse in situ destructive.
Un échantillon étalon est indispensable pour une caractérisation quantitative.
La sensibilité du SIMS dépend de la nature du matériau analysé et de l’état de sa surface.
L’instrument fonctionne en milieu ultra vide, avec un bruit de fond pratiquement nul.
2.2. Description de l’analyseur ionique
Il existe plusieurs types de spectromètres de masse: quadrupolaire, à secteur magnétique et à temps de vol, chacun présente ses propres avantages et inconvénients. Le choix de l’unou de l’autre de ces appareils sera fonction de l’utilisation principale qu’on désire en faire.
La figure (1-2) représente le schéma de principe de l’analyseur ionique CAMECA IMS 4/5/6f (analyseur ionique à secteur magnétique fabriqué par CAMECA). On peut distinguer les parties essentielles suivantes :
La colonne d'ions primaires : elle produit sur l'échantillon à analyser une sonde d'ions primaires. La colonne primaire peut être équipée de deux sources, produisant respectivement des ions d'éléments chimiques électronégatifs (Oxygène) ou
4
électropositifs (Césium). Les ions primaires sont transportés de la source à l’échantillon grâce à une optique de transfert ionique.
La colonne secondaire : elle amène les ions secondaires de l’échantillon au système de tri.
Le secteur électrostatique trie les ions secondaires en énergie. A la sortie de ce secteur, on peut discriminer les ions monoatomiques des ions polyatomiques.
Le secteur magnétique trie en masse les ions sortis du secteur électrostatique.
Le système de détection des ions secondaires (une cage de Faraday pour les forts courants ioniques et un multiplicateur d’électrons pour des faibles intensités) [1, 2, 3, 4].
5
2.3. Profil en profondeur
Le profil de concentration en profondeur est obtenu par la collection des ions secondaires en fonction du temps. C’est le mode qui nous intéresse, il est très largement utilisé en microélectronique où la distribution en profondeur des dopants ou des éléments majeurs est une information très importante. Les différentes caractéristiques de l’analyse en profondeur sont :
Dynamique du signal
La dynamique du signal est déterminée par le nombre de décade entre le maximum et le minimum du signal pour un profil d’un élément implanté dans une matrice donnée. C’est une caractéristique essentielle de l’analyse en profondeur, qui est utilisée pour valider les performances de l’analyse [5].
Sensibilité
L’un des manières d’exprimer la sensibilité est de donner la concentration minimale d’un élément donné détectable par le système. Ce paramètre est étroitement lié à la transmission de l’instrument mais il variera d’un élément à un autre en fonction de la capacité de l’élément à s’ioniser et à se pulvériser.
2.4. Résolution en profondeur
L’une des utilisations les plus importantes de l’analyse SIMS en microélectronique est la réalisation de profils de concentration en profondeur. La résolution en profondeur peut être définie comme la différence de profondeur minimale à partir de laquelle on peut mesurer une différence de concentration de manière significative.
L’application de l’analyse SIMS pour la réalisation des profils de concentration suivant la profondeur, dans le domaine des matériaux et des composants pour l’électronique moderne, est incontournable. Cependant, à cause des phénomènes physiques (mixage collisionnel, rugosité,..) qui gouvernent l’analyse SIMS, le profil en profondeur mesuré par SIMS n’est pas rigoureusement identique au profil réel.
2.5. Le mixage collisionnel
C’est le phénomène le plus problématique dans l’analyse SIMS, puisqu’il est inhérent de la mesure elle-même. Lors du bombardement de la cible par les ions primaires, ces derniers
6
transfèrent leurs énergies aux atomes de la cible, ce qui provoque une nouvelle distribution locale des espèces.
On peut distinguer deux modes de mixage collisionnel :
Le mixage par choc direct : dû essentiellement au premier choc de l’ion incident avec un atome de la cible, le transfert d’énergie est anisotrope et les atomes frappés sont projetés vers l’intérieur du matériau.
Le mixage par cascades : produit par l’ensemble des chocs secondaires entre les atomes de la cible. Ces chocs sont très nettement moins énergétiques que les précédents mais infiniment plus nombreux [2].
Figure (1-3) : Principe du mixage collisionnel.
Les conséquences du mixage collisionnel sur la résolution en profondeur
Les analyses SIMS montrent qu’une couche infiniment fine d’un élément donné dans une matrice donnée (un delta-dopage) est représentée par une courbe asymétrique possédant un front de montée rapide et une trainée décroissante beaucoup moins rapide. On considère généralement que les parties montante et descendante ont un comportement exponentiel, alors que la partie haute de la courbe est de forme arrondie, a une allure gaussienne. La décroissance exponentielle est principalement le résultat du mixage collisionnel [6].
7
2.6. La rugosité
On désignera par rugosité le relief ou le phénomène conduisant à l’apparition d’un relief sur la surface d’un matériau initialement plan et soumis à un bombardement ionique [7]. En analyse par SIMS, le faisceau d’ions primaires produit un cratère d’érosion qui doit être à fond plat pour ne pas dégrader la résolution en profondeur. En fait, il apparaît dans certaines conditions d’analyses une rugosité induite sur le fond du cratère. La rugosité est un phénomène mal compris et mal maîtrisé.
3. POSITON DU PROBLEME
Le profil en profondeur mesuré par SIMS n’est pas une image fidèle du profil existant réellement dans l’échantillon. Comme il est illustré par la figure (1-4), les phénomènes physiques qui gouvernent l’analyse SIMS (mixage collisionnel, rugosité,…) conduisent à deux problèmes :
Elargissement des profils mesurés.
8
4.
AMELIORATION DE LA RESOLUTION EN PROFONDEUR PAR
DECONVOLUTION
4.1. Modélisation de l’analyse SIMS par convolution
Les phénomènes qui gouvernent l’analyse SIMS sont supposés linéaires et indépendants les uns des autres. Ceci permet, comme il est montré par la figure (1-4) , la description de l’analyse par une opération de convolution. En utilisant le formalisme matriciel :
y = 𝐇x + b (1.1)
Où 𝐇 est la réponse impulsionnelle du système dite « Fonction de Résolution en
Profondeur, ou DRF, pour Depth Resolution Function). x : Le signal d'entrée recherché (profil
Figure (1-4): Schéma montrant l’élargissement et le décalage des profils après leur
analyse par SIMS A) delta dopage B) profil rectangulaire (créneau). Delta dopage Créneau Profil réel (𝒙) + Bruit (𝒃) Profil mesuré (𝒚) + Bruit (𝒃) 0 Z DRF (𝒉) (A) (B) 0 Z 0 Z Z0 Z0
9
réel). 𝑦 : Le signal de sortie observable (profil mesuré). B: représente le bruit qui s’ajoute aléatoirement au mesure.
Pour trouver une estimation du profil réel x on peut donc penser à utiliser une opération de déconvolution. Cependant, la présence de bruit dans la mesure complique les calculs , et il faut prendre certaines précautions pour obtenir un résultat acceptable.
4.2. Déconvolution des profils SIMS
4.2.1. Problème inverse mal posé
Un problème inverse est un problème qui consiste à déterminer des causes connaissant des effets. Ainsi, ce problème est l’inverse de celui appelé problème direct, consistant à déduire les effets, les causes étant connues. La déconvolution consiste à déterminer le profil réel (signal d’entré) à partir des donnés du profil mesuré (signal de sortie) et de la DRF. Elle est donc un problème inverse.
Dans un livre célèbre, Hadamard [8] a introduit dès 1923 la notion de problème bien posé. Il s’agit d’un problème dont:
i) La solution existe. ii) Elle est unique.
iii) Elle est stable : une petite variation des entrés entraîne une petite variation des sorties.
Les problèmes qui ne satisferont pas à ces exigences sont dits mal posés. La déconvolution des profils SIMS fait partie des problèmes inverses mal posés.
4.2.2. Régularisation d’un problème mal posé
La déconvolution des profils SIMS est un problème inverse mal posés. Les seules données de l’analyse SIMS, la mesure et la réponse impulsionnelle, ne permettent de définir qu’une classe de solutions mathématiquement possibles, contenant les solutions physiquement acceptables et celle qui ne le sont pas. Pour choisir parmi les solutions possibles celle que nous aurons jugée la plus acceptable, il faut donc inclure une connaissance préalable concernant la solution cherchée dans le processus de résolution du problème, ceci est appelé régularisation.
L’idée principale de la régularisation est donc d’abandonner l’espoir d’obtenir la solution exacte à partir des données bruitées, de définir une classe des solutions admissibles, et de sélectionner à partir de cette classe la solution qui sera considérée comme acceptable, dans le sens qu’elle est compatible avec une certaine information à priori. On note que l’apport d’information par la régularisation constitue un choix subjectif et dépendra des caractéristiques
10
que l’opérateur souhaite privilégier pour la solution recherchée. La solution obtenue n’est donc pas la seule solution possible, mais une de celles qui sont acceptables.
Dans notre travail, la régularisation du problème est obtenue à l’aide d’une technique itérative "l’algorithme de Landweber". L’arrêt de cet algorithme au bon moment, avant que les instabilités apparaissent, permet l’obtention d’une solution régularisée.
4.2.3. Réponse impulsionnelle (Fonction de résolution en profondeur DRF)
Par définition, la réponse impulsionnelle d'un système est la réponse de ce dernier à un signal d'entrée égal à un Dirac. Dans le cas de l’analyse SIMS, il ne s'agit pas de signal électrique ou optique, mais de successions de plans atomiques. La plus petite structure existante sera alors une couche atomique, que l’on peut assimiler à un créneau d’épaisseur égal à la distance moyenne interatomique (Cette structure est appelée « delta dopage »). La réponse à ce delta dopage est donc la réponse impulsionnelle de l’analyse appelée DRF.
Forme analytique de la fonction de résolution en profondeur
Dans le cas pratique, il est très intéressant de caractériser la DRF par une formule simple, avec des paramètres qui ont une relation directe avec les phénomènes physiques. Parmi les approches développées pour la description analytique de la DRF, deux expressions ont connus une large utilisation dans le SIMS dans ces dernières années, l’une proposée par Dowsett et al.
[9], et l’autre par Hofmann [10] appelée modèle MRI.
a) DRF proposée par Dowsett et al.
Dowsett et al. [9] proposent une forme analytique pour la DRF. Elle est le résultat de la convolution d’une double exponentielle par une gaussienne :
ℎ(𝑧) = 𝐷𝑒𝑥𝑝(𝑧) ⊗ 𝐺𝑎𝑢𝑠𝑠(𝑧) (1.2)
Son expression analytique détaillée est :
𝐺𝑎𝑢𝑠𝑠(𝑧) = 𝐵
√2𝜋𝜎𝑔𝑒𝑥𝑝 (
−𝑧2 2𝜎𝑔2)
11 𝐷𝑒𝑥𝑝(𝑧) = 𝐴 { 𝑒𝑥𝑝 (𝑧−𝑧0 𝜆𝑢 ) 𝑧 ≤ 𝑧0 𝑒𝑥𝑝 (−(𝑧−𝑧0) 𝜆𝑑 ) 𝑧 ≥ 𝑧0 (1.4)
Le résultat normalisé de la convolution est:
ℎ(𝑧) = 1 2(𝜆𝑢+ 𝜆𝑑){𝑒𝑥𝑝 ( (𝑧 − 𝑧0) 𝜆𝑢 + 𝜎𝑔2 2𝜆2𝑢) × [1 + 𝑒𝑟𝑓 ( −(𝑧 − 𝑧0) √2𝜎𝑔 − 𝜎𝑔 √2𝜆𝑢 )] + 𝑒𝑥𝑝 (−(𝑧 − 𝑧0) 𝜆𝑑 + 𝜎𝑔2 2𝜆𝑑2) × [1 + 𝑒𝑟𝑓 ( (𝑧 − 𝑧0) √2𝜎𝑔 − 𝜎𝑔 √2𝜆𝑑 )] (1.5) En rappelant que : 𝑒𝑟𝑓 = 2 𝜋∫ 𝑒 −𝑡2 𝑧 0
b) DRF analytique du modèle MRI
Le modèle MRI (Mixing-Roughness-Information depth) est proposée par Hofmann et al.[10]. La DRF dans le modèle MRI est basé sur trois paramètres: la longueur du mixage (𝑤), la rugosité (𝜎) et la profondeur d'échappement (𝜆), et est constitué par trois fonctions partielles
𝑔𝑤, 𝑔𝜎 et 𝑔𝜆. Mixage collisionnel : 𝑔𝑤 = 1 𝑤𝑒𝑥𝑝[−(𝑧 − 𝑧0+ 𝑤)/𝑤] (1.6) Profondeur d'échappement: 𝑔𝜆 = 1 𝜆𝑒𝑥𝑝[−(𝑧 − 𝑧0)/𝜆] (1.7) Rugosité : 𝑔𝜎 = 1 √2𝜋𝜎𝑒𝑥𝑝 [ (𝑧 − 𝑧0)2 2𝜎2 ⁄ ] (1.8)
Pour obtenir le DRF total, les trois fonctions partielles sont combinées [11, 12] :
ℎ(𝑧) = 𝑔𝑤⊗ 𝑔𝜎⊗ 𝑔𝜆 (1.9)
Pour un delta dopage situé à la profondeur 𝑧 = 𝑧0, la formule analytique suivante est obtenue:
12 ℎ(𝑧) = { 1 2𝑤[1 − 𝑒𝑥𝑝 (− 𝑤 𝜆)] 𝑒𝑥𝑝 [ −(𝑧 − 𝑧0) − 𝑤 𝑤 + 𝜎2 2𝑤2]} × {1 − 𝑒𝑟𝑓 [ 1 √2( −(𝑧 − 𝑧0) − 𝑤 𝜎 + 𝜎 𝑤)]} + {1 2𝜆𝑒𝑥𝑝 [ (𝑧 − 𝑧0) 𝜆 + 𝜎2 2𝜆2]} × {1 + 𝑒𝑟𝑓 [ 1 √2( −(𝑧 − 𝑧0) − 𝑤 𝜎 − 𝜎 𝜆)]} (1.10)
On note qu’il existe une différence entre le z0 de la DRF de Dowsett et al. et le z0 de la DRF analytique du modèle MRI. Pour la DRF Dowsett et al. z0 représente l'abscisse du point anguleux de la double exponentielle et n'a pas de signification physique réelle, alors que pour la DRF analytique du modèle MRI z0représente la position du delta dopage qui engendre la DRF.
La DRF proposé par Dowsett et al. est fréquemment utilisée pour la déconvolution des profils SIMS. Cependant, avec l'utilisation de la DRF de Dowsett et al. la détermination de la position exacte des profils mesurés est compliquée [12]; l'effet de décalage des profils vers la surface est rarement pris en compte lorsque la déconvolution est basée sur cette DRF. Le modèle MRI est basé sur des paramètres physiques qui peuvent être prédits/ ou mesurés, et il peut donner une valeur correcte du décalage du profil mesuré par rapport à la position initiale du delta dopage ou de l’interface [12]. A cause de ces avantages, la DRF analytique du modèle MRI est proposée récemment pour la déconvolution itérative des profils SIMS [13, 14]. C’est cette DRF qu’on va l’utiliser dans notre travail.
4.2.4. Contraintes dures appliquées à un signal
La régularisation est indispensable pour garantir l’unicité et la stabilité de la solution. Cependant, le fait de régulariser le problème ne suffit pas encore à obtenir une solution acceptable physiquement. En particulier, la solution peut contenir des valeurs négatives, ce qui est gênant pour un profil SIMS. En effet, les données mesurées lors de l’acquisition d’un profil SIMS représentent la concentration relative d’une espèce dans un échantillon en fonction de la profondeur, et les profils en profondeurs, sans aucun doute, ne contiennent pas des valeurs négatives. Il est très intéressant donc de pouvoir introduire cette connaissance (la positivité) dans la procédure de déconvolution. On peut penser aussi à introduire d’autres connaissances si on a d’autres informations supplémentaires sur la solution recherchée. Ces connaissances prendront le nom de contraintes dures, par opposition aux contraintes imposées par les méthodes de régularisation : contraintes douces. Une contrainte dure se définit par une transformation du signal x de manière à ce qu’il vérifie les propriétés demandées par un opérateur C spécifique.
13 Exemples de contraintes dures
a) Contrainte de positivité
Lorsqu’on veut imposer à un signal d'être positif, on peut par exemple le tronquer de telle sorte que les composantes négatives soient ramenées à 0. L’opérateur 𝑷 qui assure la positivité de la solution peut par exemple être décrit par la forme [4]:
𝑷𝑥 =𝑥+|𝑥|
2 (1.11)
Dans ce cas, on voit que les composantes négatives sont ramenées à 0, alors que les composantes positives restent inchangées. Si on souhaite plutôt effectuer un repliement des composantes négatives, alors l'opérateur de contrainte de positivité sera l'opérateur valeur absolue:
𝑷𝑥 = |𝑥| (1.12)
b) Contrainte de support
Supposons que le signal x soit connu pour demeurer dans un intervalle donné [𝑠1, 𝑠2], il est possible de lui appliquer une contrainte de support 𝑺, c’est à dire de le forcer à être nul en dehors de ce domaine de définition [4].
𝑺𝑥 = {𝑥 𝑠𝑖 𝑠1 < 𝑥 < 𝑠2
0 𝑠𝑖𝑛𝑜𝑛 (1.13)
c) Contrainte d’amplitude
Si on souhaite qu’un signal ne dépasse pas une certaine amplitude sur tout son intervalle de définition. On désigne alors par 𝑙 la limite que l’amplitude du signal ne doit pas dépasser, on peut exprimer cette contrainte par l’opérateur 𝑳 tel que [4]:
𝑳𝑥 =(𝑥−𝑙)−|𝑥−𝑙|
2 + 𝑙 (1.14)
Cette contrainte peut par exemple être introduite dans un cas pratique de l’analyse SIMS, si la concentration de telle espèce est connue de ne pas dépasser une certaine limite.
14
d) Application de plusieurs contraintes
Si on dispose de plusieurs informations, il est possible d’appliquer plusieurs contraintes sur le même signal, sans tenir compte leur ordre puisqu’ils sont commutatifs [4]:
𝑷𝑳𝑥 = 𝑳𝑷𝑥 (1.15)
La contrainte de positivité est la plus couramment appliquée, car elle est la source d’information la plus sûre et la plus puissante.
4.2.5. Algorithme de Landweber projeté (Projected Landweber algorithm)
A cause de la présence du bruit, la détermination du profil réel x à l’aide de l'équation (1-1) est un problème mal posé et la solution sera inacceptable. L’utilisation de l’algorithme de Landweber projeté (projected Landweber algorithm) avec un critère d’arrêt approprié permet d’obtenir une méthode de régularisation pour les problèmes mal posés. En outre, la déconvolution peut conduire à des valeurs négatives qui n'ont aucune signification physique pour un profil SIMS. Résoudre le problème avec cette méthode itérative permet également d’éliminer correctement ces valeurs par l’incorporation d’une contrainte de positivité. L’algorithme de Landweber projeté est un algorithme très connu dans le domaine de traitement des images. Il a été proposé pour la déconvolution des profils SIMS dans les références [1, 13, 14].
Dans ce travail, les calculs de l’algorithme de Landweber projeté ne sont pas exécutés en utilisant le formalisme matriciel, mais dans l’espace de Fourier. L’introduction de la contrainte de positivité doit être effectuée dans le domaine temporel. A chaque itération on aura donc besoin d’une transformation de Fourier inverse avant l’application de la contrainte et d’une transformation directe après.
L’algorithme est exécuté comme suit:
{ 𝑋0 = 𝐻∗𝑌 𝑋𝑛+1 = 𝑋𝑛+ 𝛼(𝐻∗𝑌 − 𝐻∗𝐻𝑋 𝑛) … … … … . (∗) 𝑥𝑛+1 = 𝐹𝑇−1(𝑋𝑛+1) 𝐶𝑥𝑛+1 = 0.5(𝑥𝑛+1+ |𝑥𝑛+1|) 𝑋𝑛 = 𝐹𝑇(𝐶𝑥𝑛+1) 𝑒𝑡 𝑟𝑒𝑡𝑜𝑢𝑟𝑛𝑒𝑟 à (∗) (1.16)
15
Où 𝑌 , 𝑋 , 𝐻 sont, respectivement, les transformées de Fourier de y, x et h. 𝐻∗ est le conjugué
de 𝐻. 𝑋0 est une supposition initiale. 𝑋𝑛 est le profil déconvoluée à la niéme itération. C est la
contrainte de positivité. 𝛼 est le paramètre de relaxation. Dans ce travail nous avons pris tout simplement 𝛼 = 1.
4.2.6. Calcule des erreurs
Pour mesurer la qualité d’une déconvolution, il est très intéressant de calculer les erreurs. On a deux types d'erreur, l’erreur vraie, commise entre les profils réel et déconvolué, et l’erreur de reconstruction, entre les profiles mesuré et reconstruit [1, 2, 4].
a) Erreur vraie
L’idéal dans une opération de déconvolution serait de disposer de l’erreur vraie (l'erreur exacte). Malheureusement, elle n’est accessible qu’en simulation. Dans des conditions réelles, le profil réel est bien sûr inconnu, et c’est lui-même qu’on cherche à estimer par l’opération de déconvolution. Par contre, sera une donnée précieuse lors des simulations, où elle permet de vérifier les performances théoriques d’une méthode de déconvolution. Elle peut être exprimée sous deux formes :
Sous forme d’un vecteur :
La différence point à point entre le profil déconvolué à l’itération n (xn) et le profil réel (x) :
evv = xn− x (1.17)
Ecart Euclidien relatif entre xn et x :
eve = ‖xn−x‖
‖x‖ (1.18)
b) Erreur de reconstruction
Cette erreur est accessible dans le cas de la déconvolution des profils simulés et même expérimentaux. Comme dans le cas de l’erreur vraie, elle peut être exprimée sous deux formes :
16
Sous forme d’un vecteur :
La différence point à point entre le profil mesuré (y) et le profil reconstruit (𝐇xn) :
E𝐫𝐯 = y − 𝐇xn (1.19)
Ecart Euclidien relatif entre le profil mesuré et le profil reconstruit :
E𝐫𝐞 =‖y−𝐇xn‖
‖y‖ (1.20)
5. CONCLUSION
Dans ce chapitre, nous avons premièrement exposé brièvement les principes et les caractéristiques de l’analyse SIMS. Malgré les nombreux avantages de l'analyse par SIMS, les majeurs inconvénients de la technique sont la destruction de l'échantillon et l'altération du profil réel de concentration recherché. En effet le profil en profondeur n’est pas une image fidèle du profil existant réellement dans l’échantillon. Les phénomènes physiques qui gouvernent l’analyse SIMS conduisent à deux problèmes : Elargissement et décalage des profils mesurés par SIMS. L'amélioration de la résolution en profondeur est possible par la l’utilisation d’une opération de déconvolution.
La déconvolution des profils SIMS est un problème inverse mal posé. La présence de bruit dans la mesure complique les calculs, et il et faut prendre certaines précautions pour obtenir une solution acceptable. Il faut premièrement régulariser le problème mal posé .Ceci peut être réalisé par l’utilisation d’une technique itérative. Dans ce travail nous avons choisis d’utiliser l’algorithme de 'Landweber'. De plus, il faut appliquer des contraintes dures pour forcer la solution obtenue à satisfaire les propriétés physiques connu auparavant sur les mesures comme la positivité.
Chapitre2
17
1. INTRODUCTION
Dans ce chapitre, nous allons dans un premier temps présenter les différents types de bruit, ainsi que le bruit SIMS. Nous passerons ensuite à la simulation de différents types de profils SIMS: gaussiens, créneaux et deltas-dopage.
2. BRUIT SIMS
Toute mesure physique, y compris les profils mesurés par SIMS, est entachée de divers signaux parasites, considérés ensemble comme le bruit de mesure. Il faut cependant distinguer entre deux types de signaux "parasites" qui viennent s’ajouter au signal utile. On considère que le bruit est de nature aléatoire, c'est-a-dire qu'on ne peut pas prédire sa valeur au temps t2 à partir
de celle au temps t1. Les autres signaux parasites, comme un signal sinusoïdal ou une
composante continue, ne seront pas considérés comme faisant partie du bruit, puisqu’on peut parfaitement les distinguer et donc les éliminer du signal mesuré [4].
Nous allons tout d’abord exposer les différentes caractéristiques d’un bruit, avant de présenter le bruit SIMS.
2.1. Différents types de bruit
2.1.1. Caractéristiques fréquentielles
Bruit blanc
C’est le bruit le plus répandu en traitement du signal. Il est largement utilisé dans les modélisations et les simulations, car il correspond au cas le plus simple. Ce bruit possède une densité spectrale de puissance constante sur tout l'espace des fréquences. Autrement dit, un bruit blanc contient toutes les fréquences possibles de −∞ à +∞ avec une proportion égale.
Bruit rose
Le bruit rose ou « blanc à bande limitée » est défini de la même manière que le bruit blanc, mais sur un intervalle de fréquences fini. Ce cas est plus réaliste que celui du bruit blanc puisqu’aucun signal physique ne possède un spectre à support infini.
18
2.1.2. Caractéristiques probabilistes
Pour analyser ou simuler des signaux réels, d’autres modèles, basés sur la densité de probabilité du bruit, peuvent être considérés. Ainsi, en particulier, deux modèles de bruit qui sont:
Bruit gaussien
Un bruit est dit gaussien si sa densité de probabilité possède une forme d'une gaussienne caractérisée par une valeur moyenne 𝑝𝑐 et un écart-type 𝜎. La loi de p s’écrit :
𝑝 𝑃 = 1
2𝜋𝜎𝑒
−(𝑝 −𝑝 𝑐 )2
2𝜎 2 (2.1)
En traitement du signal, l’hypothèse de bruit Gaussien est très souvent prise pour les raisons suivantes :
Tous les moments d’une variable aléatoire gaussienne peuvent être calculés à partir des moments du premier et du second ordre.
La somme de plusieurs processus aléatoires quelconques tend vers un processus gaussien
[15].
Bruit poissonien
La densité de probabilité d’un bruit poissonien est donné par :
𝑝 𝑘 = λ
𝐾
𝐾!𝑒
−λ 𝐾 ∈ 𝑁 (2.2)
Où : λ est la variance.
La probabilité d’avoir 𝑛 particules pendant une durée 𝑇 est :
𝑝 𝑛, 𝑇 = (𝐾𝑇)𝑛
𝑛 ! 𝑒
−𝐾𝑇 (2.3)
19
Si 𝐾 devient grand la loi de poisson tend vers une loi de Gauss. 1/𝑘 traduit donc le nombre moyen d’événements par unité de temps.
Les variables aléatoires poissoniennes sont typiquement rencontrés dans tous les phénomènes de comptage.
2.2. Nature du bruit SIMS
Allen et al. [16] proposent de modéliser le bruit SIMS, pour un profil de bore dans du silicium, par une distribution de probabilité gaussienne. D’après leurs observations expérimentales, ils ont établi une loi empirique reliant la valeur moyenne 𝑀 du signal parfait (sans bruit) à l’écart-type du bruit 𝜎 :
𝜎 ≈ 1.7 𝑀 (2.4)
Cette relation n’est valable que pour les valeurs du signal non nulles. Elle indique que les variations du bruit sont dépendantes de l’amplitude locale du signal SIMS. L’écart-type du bruit n’est pas donc considéré comme constant. Cette relation est utilisée par la suite par plusieurs auteurs [1, 2, 4] pour la simulation des profils SIMS. De notre coté, nous allons l'utiliser pour simuler nos profils. Selon d’autres auteurs comme Makarov [17], le bruit de mesure dans les profils SIMS obéit plutôt à la loi de Poisson.
3. SIGNAUX-TYPES UTILISES POUR LES SIMULATIONS
Nous avons choisi de simuler des signaux typiques, rencontrés en traitement de signal ainsi qu’en SIMS :
3.1. Gaussienne
Les profils gaussiens peuvent être rencontrés dans le cas des implantations de dopants dans une matrice ou des diffusions Fickiennes : Un delta-dopage subit un recuit aboutit en principe à un profil parfaitement gaussien
La fonction gaussienne est l’un des cas analytique les plus simples et les plus intéressants. Elle présente l’avantage d’être entièrement caractérisée par son écart-type 𝜎 qui définit une largeur à mi-hauteur FWHM (pour «Full Width at Half Maximum ») égale à 2.335 𝜎.
20
3.2. Créneau
Le créneau se retrouve fréquemment dans les échantillons à analyser, avec des fronts montant et descendant plus ou moins abrupts. Dans nos simulations les fronts sont supposés parfaitement abrupts.
3.3. Delta-Dopage
Les deltas-dopage sont les profils les plus affectés par la mesure lors de l’analyse SIMS. Ils constituent donc des structures idéales pour évaluer les méthodes de déconvolution.
4. PROCEDURE DE SIMULATION
La simulation des profils SIMS est basée sur l’approche suivante : un « profil réel » est construit analytiquement. Ce profil est convolué ensuite avec la DRF analytique du modèle MRI Les paramètres de la DRF sont tirés d’une mesure expérimentale. On abouti dans un premier temps à un « signal parfait » c'est-à-dire sans bruit ajouté. Enfin, une composante de bruit est ajoutée au résultat de la convolution. Le profil résultant de cette procédure sera appelé « profil simulé ».
Pour la simulation de bruit qui s’ajoute au signal, nous avons construit un bruit gaussien de valeur moyenne nulle par rapport au signal (la variation du signal due au bruit, par rapport au signal parfait, peut être positive ou négative avec une distribution de probabilité gaussienne autour de la valeur parfaite). L’écart type de ce bruit est assujetti à la relation (2.4)
Cette relation n’est valable que pour les valeurs du signal non nulles. Pour simuler le comportement des profils quand le signal devient très faible, nous avons procédé de la manière suivante : Lorsque le signal est inférieur à 1 coup par seconde, alors la valeur moyenne de bruit ne suit plus celle de signal mais est conservée à 1 coup par seconde.
Les profils utilisés dans nos simulations seront construits avec un pas d’échantillonnage de 0.1 nm. Ils seront, dans la plupart des cas, présentés sur quatre décades : le maximum de profils simulés est situé autour de 104 coups par secondes. Deux valeurs du rapport signal sur bruit (SNR) sont utilisées 30 dB et 40 dB.
On rappel que le 𝑆𝑁𝑅 (Signal to Noise Ratio) est le rapport de la puissance du signal y et de la puissance du bruit 𝑏. Il exprimé en décibel dB par l’expression suivante :
21
𝑆𝑁𝑅(𝑑𝐵 ) = 10𝑙𝑜𝑔10 𝑦 2
𝑏 2 (2.5)
La programmation a été effectuée sous MATLAB selon l’organigramme ci-dessous :
Figure (2-1): Procédure de simulation sous MATLAB
Ce chapitre est consacré à la simulation des profils SIMS. La déconvolution de ces profils sera effectuée dans le chapitre suivant.
Positionnement des profils simulés
Suivant la référence [13], pour simuler correctement un profil SIMS, il faut le décaler vers la surface avec une distance ∆𝑧 = 𝑧0− 𝑧𝑖 , où 𝑧0 est la profondeur du delta dopage utilisé
Addition du bruit
Algorithme de déconvolution Signal parfait
Profil simulé
Profil déconvolué
Construction de la DRF Construction du profil réel
22
pour calculer la DRF du modèle MRI et 𝑧𝑖 la profondeur du premier point de ce DRF. La DRF utilisé dans nos simulations est calculée avec 𝑧0 = 7 𝑛𝑚 et 𝑧𝑖 = 0 𝑛𝑚 (mêmes valeurs que réf.
[13]). Les profils simulés sont donc décalés vers la surface avec ∆𝑧 = 7 𝑛𝑚.
Les paramètres de la DRF utilisé dans ce travail sont tirés de la référence [18]. Ces
paramètres sont typiques pour un profil en profondeur SIMS analysé à 2 𝑘𝑒𝑉 / 𝐶𝑠+: 𝑤 = 2,3 𝑛𝑚, 𝜎 = 1,4 𝑛𝑚, 𝜆 = 0,3 𝑛𝑚. Cette DRF est représentée sur la figure (2-2). Elle
est normalisée à 1.
Figure(2-2): DRF analytique du modèle MRI tracé pour: 𝑤 = 2,3 𝑛𝑚, 𝜎 = 1,4 𝑛𝑚,
𝜆 = 0,3 𝑛𝑚, 𝑧0 = 7 𝑛𝑚 et 𝑧𝑖 = 0 𝑛𝑚.
5. SIMULATION DES PROFILS SIMS
Nous allons simuler analytiquement les trois structures, mentionnés ci-dessus: gaussien, créneau et delta-dopage.
Simulation des profiles gaussiens
Les figures (2-3) et (2-4) représentent la simulation de deux profils gaussiens d’écart-types 𝜎 = 4 𝑛𝑚 et 𝜎 = 12 𝑛𝑚, pour deux valeurs du 𝑆𝑁𝑅, 30 𝑑𝐵 et 40 𝑑𝐵.
0 2 4 6 8 10 12 14 16 18 20 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 profondeur(nm) in te n s it é n o rm a lis é e Δz Z0
23
Figure (2-3): Simulation d’un profil gaussien de 𝜎 = 4 𝑛𝑚. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A B
24
Figure (2-4): Simulation d’un profil gaussien de 𝜎 = 12 𝑛𝑚. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A B
25
A partir des figures 2-3 et 2-4, on peut constater que lorsque la largeur du gaussien est de plus en plus grand par rapport à celle de la DRF, le profil obtenu par simulation est de plus en plus proche du profil réel. On remarque aussi que la diminution du 𝑆𝑁𝑅conduit à un signal plus bruité.
Simulation des profils créneaux
Les figures (2-5) et (2-6) représentent la simulation de deux profils créneaux de 4 nm et de 30 nm de largeur, pour deux valeurs du 𝑆𝑁𝑅, 30 𝑑𝐵 et 40 𝑑𝐵.
La simulation des profils créneaux représentée par les figures 2-5 et 2-6, permet de tirer les remarques suivantes:
Un créneau de largeur égale à 4 𝑛𝑚, donne un profil simulé élargi avec une diminution de son amplitude par rapport au profil réel.
Pour le créneau de 30 𝑛𝑚 de largeur, le profil obtenu est presque plat au sommet. On obtient des signaux plus bruités pour une valeur du 𝑆𝑁𝑅 plus faible.
26
Figure (2-5): Simulation d’un profil créneau de 4 𝑛𝑚 de largeur. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A B
27
Figure (2-6): Simulation d’un profil créneau de 30 nm de largeur. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A B
28
Simulation d’un profil delta-dopage
Les figures (2-7) et (2-8) représentent la simulation d’un profil d’un d'un delta-dopage de 0.3 𝑛𝑚 de largeur et de 105 coups par secondes de maximum pour un 𝑆𝑁𝑅 de 30 𝑑𝐵 et 40 𝑑𝐵.
Figure (2-7): Simulation d'un profil d’un delta dopage de 0.3 𝑛𝑚 de largeur.
0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A B
29
En simulant un profil d'un delta dopage, au lieu d'obtenir un profil de 0.3 𝑛𝑚 nous avons obtenu un profil assez élargi et bruité aux niveaux bas. Une déconvolution est indispensable afin de restituer le profil réel.
30
Simulation d’un profile constitué par deux deltas-dopages séparés d’une distance 𝒅
Figure (2-8) : Simulation de deux deltas-dopage séparés d’une distance 𝑑 = 2 𝑛𝑚.
A) 𝑆𝑁𝑅 = 30 𝑑𝐵. B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A 0102030405060708090100 100 101102 103104 profondeur(nm)) intensité(cps)
profil réelprofil simulé
31
Figure (2-9): Simulation de deux deltas-dopage séparés d’une distance 𝑑 = 8 𝑛𝑚.
A) 𝑆𝑁𝑅 = 30 𝑑𝐵. B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé B A
32
Figure (2-10): Simulation de deux deltas-dopage séparés d’une distance 𝑑 = 30 𝑛𝑚.
A) 𝑆𝑁𝑅 = 30 𝑑𝐵. B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil réel profil simulé A B
33
D’après les simulations d'un profil constitué par deux deltas-dopage on observe :
Pour une distance 𝑑 = 2 𝑛𝑚, les deux deltas-dopages sont indiscernables dans le profil simulé (figure 2-8). Donc, deux deltas-dopages très proches l'un de l'autre peuvent ne pas être détectés après la mesure par SIMS.
Pour une distance 𝑑 = 8 𝑛𝑚, les deux deltas-dopage sont toujours non séparés mais on peut noter la présence de deux pics (figure 2-9).
Enfin, pour une distance 𝑑 = 30 𝑛𝑚, contrairement aux cas précédents, les deux deltas dopages sont totalement séparés (figure 2-10).
On peut donc déduire que la distance 𝑑 entre les structures influe beaucoup sur les résultats obtenus par SIMS.
6. CONCLUSION
Dans ce chapitre, nous avons simulé des signaux typiques rencontrés en SIMS. Nous avons conclu :
On obtient des signaux plus bruités pour une valeur du 𝑆𝑁𝑅 plus faible.
Lorsque la largeur de la gaussienne est plus grande, le profil simulé est plus proche du profil réel.
Un créneau de petit largeur, nous donne un profil simulé assez élargi avec une diminution considérable de son amplitude par rapport au profil réel, par contre quand la largeur et plus grande, on obtient un profil avec un sommet presque plat.
Dans le cas d’un profil constitué par deux deltas-dopage séparés d’une distance 𝑑, pour une très faible distance les deux deltas-dopages sont indiscernables dans les profils simulés, par contre pour une distance plus grande, les deux deltas dopages sont presque totalement séparés. La distance 𝑑 entre les structures influe donc beaucoup sur les résultats obtenus par SIMS.
Chapitre3
34
1. INTRODUCTION
Nous disposons d’une technique de déconvolution itérative (l'algorithme de landweber), ainsi que des signaux simulès. Dans ce chapitre, nous allons donc déconvoluer ces signaux en utilisant cette technique. Ceci permet d’étudier son efficacitè. En effet, l’utilisation des profils simulés permet de bien vérifier les performances de l’algorithme en termes de qualité de restauration des profils réels. Dans ce cas, les profils réels sont construits par nous-mêmes, ce qui permet de vérifier la qualité de restauration par une simple comparaison visuelle entre le profil déconvolué et le profil réel et /où par le calcul de l’erreur entre le profil réel et le profil déconvolué (l’erreur vraie). De plus, l’évolution de l’erreur vraie en fonction des itérations permet d’étudier la convergence de l’algorithme.
2. DECONVOLUTION DES PROFILS SIMULES
Dans cette section, nous allons examiner les performances de la technique de déconvolution en l’appliquant aux profils précédement simulés dans le chapitre 2.
Positionnement des profils déconvolués
La Figure (3-1) donne une idée sur l'effet de décalage des profils dans l'analyse SIMS. On observe que le profil calculé par le DRF du modèle MRI est déplacé de son emplacement réel 𝑧0 vers la surface. Comme il est déjà mentionné dans le chapitre 1, l'utilisation de la DRF analytique du modèle MRI permet d'obtenir la valeur correcte de ce décalage. Pour prendre en compte l'effet de décalage et placer les profils dans leurs positions réelles, nous allons positinner les profils déconvlués selon la procédure proposée dans la rééférence [13] : Après déconvolution,
les profils déconvolués sont décalés, dans le sens opposé à la surface, d'une distance ∆𝑧 = 𝑧0− 𝑧𝑖.
35
Figure(3-1): DRF analytique du modèle MRI tracé pour: 𝑤 = 2,3 𝑛𝑚, 𝜎 = 1,4 𝑛𝑚, 𝜆 = 0,3 𝑛𝑚, 𝑧0 = 7𝑛𝑚 et 𝑧𝑖 = 0 𝑛𝑚.
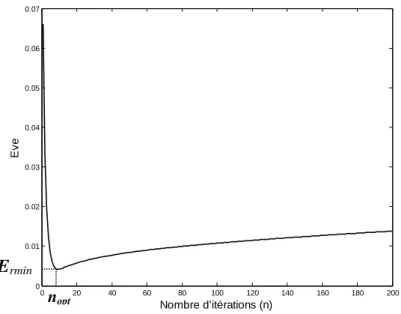
semi-convergence
Le comportement de l’erreur vraie (Figure (3-2)) indique que l'algorithme de Landweber présente une semi-convergence. Les meilleurs résultats de déconvolution sont bien sûr obtenus après nopt itérations où l’erreur vraie atteint sa valeur minimale. Dans ce travail, les profils
déconvolués, dans le cas des signaux gaussiens et créneaux, sont obtenus en utilisant nopt
itérations. 0 2 4 6 8 10 12 14 16 18 20 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02 profondeur(nm) i n te n s it é n o rm a lis é Δz Z0
36
Figure (3-2) : Comportement de semi-convergence
a. Déconvolution des profils gaussiens:
Les valeurs de nopt dans le cas de la déconvolution des profils gaussiens sont citées dans le tableau suivant:
Tableau 1: Nombre optimal des iterations nopt . Cas des profils gaussiens
0 20 40 60 80 100 120 140 160 180 200 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 Nombre d'itérations (n) E v e 𝑺𝑵𝑹 σ 𝒏𝒐𝒑𝒕 𝟑𝟎 𝒅𝑩 2 𝑛𝑚 162 5 𝑛𝑚 5 𝟒𝟎 𝒅𝑩 2 𝑛𝑚 429 5 𝑛𝑚 15 nopt Ermin
37
Figure (3-3) : Déconvolution d'un profil gaussien de σ = 2 nm. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé A B
38
Figure (3-4) : Déconvolution d'un profil gaussien de 𝜎 = 5 𝑛𝑚. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé A B
39
La figure 3-3 et 3-4 nous améne a tirer les conclusions suivantes:
Lorsque 𝜎 = 2𝑛𝑚 , deux "lobes " non néligeables apparaissent aux pieds du profil déconvolué. D’après la référence [4], ces lobes sont le résultat de la mauvaise distribution de la dose au début de la déconvolution.
Les profils réels recherchés ont été restitués surtout dans les hauts niveaux des profils.
Erreurs
Les courbes des erreurs, dans le cas du profil gaussien de 𝜎 = 5 𝑛𝑚 (𝑆𝑁𝑅 = 30 𝑑𝐵) sont représentées sur les figures suivantes:
40
Figure (3-5) : A) Evolution de l’erreur vraie en fonction du nombre d’itérations. B) Vecteur de
l’erreur vraie (après nopt itérations).C) Évolution de l’erreur de reconstruction (Ere) en fonction
du nombre d’itérations. Cas du profil gaussien.
0 50 100 150 200 250 300 0.01 0.02 0.03 0.04 0.05 0.06 0.07 Nombre d'itérations (n) E v e 0 10 20 30 40 50 60 70 80 90 100 -50 -40 -30 -20 -10 0 10 20 30 40 profondeur(nm)) E v v 0 50 100 150 200 250 300 0.03 0.035 0.04 0.045 0.05 0.055 0.06 itérations (n) E re A B C
41
La figure (3-5A) représente la variation de l’erreur vraie en fonction du nombre d’itération n. On observe que l’erreur diminue avec l’augmentation du nombre des itérations jusqu’à atteindre sa valeur minimale, puis augmente de nouveau.
La figure (3-5C) représente les variations de l'erreur de reconstruction (écart Euclidien relatif Ere). L’erreur de reconstruction décroît significativement dans les premières itérations puis atteint très rapidement une région très plate.
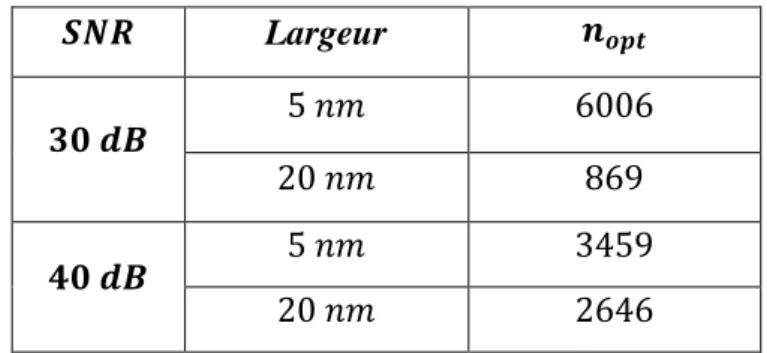
b-Déconvolution des profils créneaux:
Les valeurs de nopt dans le cas de la déconvolution des créneaux sont citées dans le tableau suivant :
Tableau 2 : Nombre optimal des iterations nopt . Cas des profils créneaux.
𝑺𝑵𝑹 Largeur 𝒏𝒐𝒑𝒕
𝟑𝟎 𝒅𝑩 5 𝑛𝑚 6006
20 𝑛𝑚 869
𝟒𝟎 𝒅𝑩 5 𝑛𝑚 3459
42
Figure(3-6) : Déconvolution d’un profil créneau de 5 𝑛𝑚 largeur. A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé A B
43
Figure (3-7) : Déconvolution d’un profil créneau de 20 𝑛𝑚 largeur A) 𝑆𝑁𝑅 = 30 𝑑𝐵.
B) 𝑆𝑁𝑅 = 40 𝑑𝐵. 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé A B
44 D'après les figures (3-6) et (3-7), on observe :
Après déconvolution, les fronts montant et descendants des profils créneaux sont pratiquement restaurés. Les pentes expenentielles, visibles dans les profils mesurés disparaissent. Cepenadant, il y a apparition d'oscillations sur les plateau des créneaux.
Aux niveaux bas, il y apparition des artéfacts de déconvolution assez négligeables.
Erreurs
Les courbes des erreurs, dans le cas du profil créneau de 20 𝑛𝑚 de largeur ( 𝑆𝑁𝑅 = 40 𝑑𝐵), sont représentées sur la figure (3-8). D’après la courbe de l’erreur vraie
représentée sur la figure 3-8A, on observe que la propriété de semi-convergence est moins prononcée par comparaison avec le cas de la déconvolution des profils gaussiens.
45
Figure (3-8) : A) Evolution de l’erreur vraie en fonction du nombre d’itération.
B) Vecteur de l’erreur vraie (après nopt itérations).C) Évolution de l’erreur de reconstruction
(Ere) en fonction du nombre d’itérations. Cas du profil créneau
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 0.1 0.12 0.14 0.16 0.18 0.2 0.22 0.24 Nombre d'itérations (n) E v e 0 10 20 30 40 50 60 70 80 90 100 -5 -4 -3 -2 -1 0 1 2 3 4 5x 10 4 profondeur(nm)) E v v 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 itérations (n) E re A B C
46
c -Déconvolution d'un profil delta-dopage:
Figure (3-9) : Déconvolution d'un profil d’un delta dopage de 0.3 𝑛𝑚 de largeur
0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé 0 10 20 30 40 50 60 70 80 90 100 100 101 102 103 104 105 profondeur(nm)) in te n s it é (c p s ) profil déconvolué profil réel profil simulé B A
47
Ici l'opération de la déconvolution cherche a restaurer un profil réel de 0.3 𝑛𝑚 de largeur. L'opération de déconvolution doit normalment conduire a un profil déconvolué composé aussi de 0.3 nm, avec un maximum égale à celui du profil réel. En sachant que la déconvolution n'est pas supposée restaurer complétement le profil réel, on peut dire que ce résultat est très satisfaisant vu que le profil déconvolué est plus proche du profil réel que le profil simulé.
Erreurs
La figure 3-10 représente l’erreur vraie. On peut voir clairement que l’erreur vraie décroît toujours, et ceci quelque soit le nombre d’itérations effectué. On note que l’erreur vraie continue de diminuer même après 100000 itérations.