Digitized
by
the
Internet
Archive
in
2011
with
funding
from
Boston
Library
Consortium
IVIember
Libraries
Massachusetts
Institute
of
Technology
Department
of
Economics
Working
Paper
Series
BIAS
CORRECTED
INSTRUMENTAL
VARIABLES ESTIMATION
FOR
DYNAMIC
PANEL
MODELS
WITH
FIXED EFFECTS
Jinyong
Hahn
Jerry
Hausman
Guido
Kuersteiner
Working
Paper
01
-24
June
2001
Room
E52-251
50
Memorial
Drive
Cambridge,
MA
02142
This
paper
can
be
downloaded
without
charge
from
the
Social
Science
Research Network
Paper
Collection
atMASSACHUSEHS
INSTITUTEOFTECHNOLOGY
Massachusetts
Institute
of
Technology
Department
of
Economics
Working
Paper
Series
BIAS
CORRECTED
INSTRUMENTAL
VARIABLES
ESTIMATION
FOR
DYNAMIC
PANEL
MODELS
WITH
FIXED
EFFECTS
Jinyong
Hahn
Jerry
Hausman
Guide
Kuersteiner
Working
Paper
01
-24
June
2001
Room
E52-251
50
Memorial
Drive
Cambridge,
MA
021
42
This
paper
can be downloaded
without
charge
from
the
Social
Science
Research Network
Paper
Collection
at
Bias
Corrected
Instrumental Variables
Estimation
for
Dynamic
Panel
Models
with Fixed
Effects
Jinyong
Hahn
Jerry
Hausman
Guido
Kuersteiner
Brown
University
MIT
MIT
June,
2001
Acknowledgment:
We
are grateful toYu
Hu
for exceptional research assistance. Helpfulcomments
by
Guido
Imbens,
Whitney
Newey,
James
Powell,and
participants ofworkshops
atArizona
State University, BerkeleyHarvard/MIT,
Maryland,
Triangle,UCL,
UCLA,
UCSD
are appreciated.Abstract
This
paper
analyzes the second order bias of instrumental variables estimators for adynamic
panel
model
with fixed effects.Three
differentmethods
of second order bias correction areconsidered. Simulation experiments
show
that thesemethods
perform
well if themodel
doesnot
have
a root near unity butbreak
down
near the unit circle.To remedy
theproblem
near the unit root aweak
instrumentapproximation
is used.We
show
thatan
estimatorbased
on
long differencing the
model
isapproximately
achieving theminimal
bias ina
certain class ofinstrumental variables (IV) estimators. Simulation experiments
document
theperformance
of theproposed
procedure in finite samples.Keywords:
dynamic
panel, bias correction,second
order, unit root,weak
instrumentreduces the finite
sample
biasand
alsodecreases theMSE
ofthe estimator.To
increeise further the explanatorypower
ofthe instruments,we
use the technique ofusing estimated residuals asadditional instruments a technique introducedinthesimultaneous equations
model by Hausman,
Newey, and
Taylor (1987)and
used in thedynamic
paneldata
contextby
Ahn
and Schmidt
(1995).
Monte
Carloresultsdemonstrate
that the long differenceestimatorperforms
quite well,even for high positive values of the lagged variable coefficient
where
previous estimators arebadly biased.
However,
thesecond orderbiascalculationsdo
notpredict welltheperformance
oftheestima-tor for these high values ofthe coefficient. Simulation evidence
shows
that ourapproximations
do
notwork
well near the unit circlewhere
themodel
suffersfrom
a near non-identificationproblem. In order to analyze the bias of
standard
GMM
proceduresunder
these circumstanceswe
consider alocal to non-identificationasymptotic
approximation.The
alternativeasymptoticapproximation
of Staigerand
Stock (1997)and
Stock
and Wright
(2000) is
based
on
letting the correlationbetween
instrumentsand
regressors decrease at aprescribed rate ofthe
sample
size. In their work, it isassumed
that thenumber
ofinstrumentsis held fixed as the
sample
size increases. Their limit distribution isnonstandard
and
in specialcases corresponds to exact small
sample
distributionssuch
as theone
obtainedby
Richardson
(1968) for the bivariate simultaneous equations
model.
This approach
is related to thework
by
Phillips (1989)and Choi and
Philfips (1992)on
the asymptotics of2SLS
in the partiallyidentified case.
Dufour
(1997),Wang
and
Zivot (1998)and
Nelson, Startzand
Zivot (1998)analyze valid inference
and
tests in the presence ofweak
instruments.The
associated biasand
mean
squared error of2SLS
under
weak
instrumentassumptions
was
obtainedby
Chao
and
Swanson
(2000).Inthis
paper
we
usetheweak
instrumentasymptotic approximations
to analyze2SLS
forthedynamic
panel model.We
analyze theimpact
of stationarityassumptions on
thenonstandard
limit distribution.Here
we
let the autoregressiveparameter
tend tounity in asimilarway
asinthe near unit root literature. Nevertheless
we
are not considering time series cases since in ourapproximation
thenumber
oftime periodsT
isheld constant while thenumber
of cross-sectionalobservations
n
tends to infinity.Our
limiting distribution for theGMM
estimatorshows
that onlymoment
conditionsin-volving initial conditions are asymptotically relevant.
We
define a class ofestimators basedon
linearcombinations ofasymptotically relevant
moment
conditionsand
show
that abiasminimal
estimator within this class can approximatelybe based on
taking long differences ofthedynamic
panel model. In general, it turns out that
under
near non-identification asymptotics the optimal proceduresofAlvarezand
Arellano (1998), Arellanoand
Bond
(1991) ,Ahn
and Schmidt
(1995.1997) are suboptiraal
from
a bias point ofview
and
inference optimally shouldbe
basedon
asmaller than the full set of
moment
conditions.We
show
that a biasminimal
estimator canbe
obtained by using a particular linear
combination
of the originalmoment
conditions.We
are1
Introduction
We
areconcerned with
estimation ofthedynamic
panelmodel
with
fixed effects.Under
largen, fixed
T
asymptotics it is wellknown
from
Nickell (1981) that thestandard
maximum
hkeli-hood
estimator suffersfrom an
incidentalparameter problem
leading to inconsistency. In orderto avoid this
problem
the hterature has focusedon
instrumental variables estimation(GMM)
applied to first differences.Examples
includeAnderson
and Hsiao
(1982), Holtz-Eakin,Newey,
and Rosen
(1988),and
Arellanoand
Bond
(1991).Ahn
and Schmidt
(1995),Hahn
(1997),and
Blundell
and
Bond
(1998) considered furthermoment
restrictions.Comparisons
ofinformation contents ofvarieties ofmoment
restrictionsmade
by
Ahn
and Schmidt
(1995)and
Hahn
(1999) suggest that, unless stationarity ofthe initial level y^o issomehow
exploited as in Blundelland
Bond
(1998), the orthogonality oflagged levels with first differences provide the largest sourceofinformation.
Unfortunately, thestandard
GMM
estimator obtained after firstdifferencing hasbeen found
to suffer
from
substantial finitesample
biases. SeeAlonso-Borrego
and
Arellano (1996).Mo-tivated
by
this problem, modifications of likelihoodbased
estimatorsemerged
in the literature.See Kiviet (1995), Lancaster (1997),
Hahn
and
Kuersteiner (2000).The
likelihoodbased
esti-mators
do
reduce finitesample
biascompared
to the standardmaximum
likelihood estimator,but
the remaining bias is still substantial forT
relatively small.In thispaper,
we
attempt
toeliminate thefinitesample
biasofthestandard
GMM
estimator obtained after first differencing.We
view
the standardGMM
estimator as aminimum
distance estimator thatcombines
T—
1 instrumentalvariableestimators(2SLS)
appliedtofirstdifferences.This view
hasbeen adopted
by
Chamberlain
(1984)and
Grihchesand
Hausman
(1986). It hasbeen noted
for quite a while thatIV
estimators canbe
quite biased in finite sample. SeeNagar
(1959),
Mariano
and
Sawa
(1972),Rothenberg
(1983),Bekker
(1994),Donald
and
Newey
(1998)and
Kuersteiner (2000). If the ingredients of theminimum
distance estimator are all biased, it is natural to expect such bias in the resultantminimum
distance estimator, or equivalently,GMM.
We
propose to eliminate thebias oftheGMM
estimatorby
replacing all the ingredientswith
Nagar
type bias corrected instrumental variable estimators.To
our knowledge, the idea ofapplying
a
minimum
distance estimator to bias corrected instrumental variables estimators isnew
in the literature.We
consider a second orderapproach
to the bias of theGMM
estimator using theformula
contained in
Hahn
and
Hausman
(2000).We
find that thestandard
GMM
estimator suffersfrom
significant bias.The
bias arisesfrom
two primary
sources: the correlation ofthe structuralequation error with the reduced
form
errorand
the low explanatorypower
ofthe instruments.We
attempt
to solve theseproblems by
using the "long difference technique" of Grilichesand
Hausman
(1986). Grilichesand
Hausman
noted that bias isreduced
when
long differences areused in tlie errors in variable problem,
and
a similar resultworks
here with the second order bias.Long
differences also increases the explanatorypower
of the instrumentswhich
furtherderive the
form
ofthe optimalhnear
combination.2
Review
of
the Bias
of
GMM
Estimator
Consider the usual
dynamic
panelmodel
with
fixed effects:y^t
=
ai+
f3yi^t-i+
eu, i=
l,...,n; t=
l,...,T
(1)It has
been
common
in the literature to consider the casewhere
n
is largeand
T
is small.The
usual
GMM
estimator isbased
on
the first differenceform
ofthemodel
Vit
-
yi,t-\=
(3{yi,t-i-
yi,t-2)+
{en-
^t,t-i)where
the instruments arebased
on
the orthogonalityE
[yi,5 {^it-
et,t-i)]=
s=
0,... ,i-
2.Instead,
we
consider aversion oftheGMM
estimator developedby
Arellanoand
Bover
(1995),which
simplifies the characterization of the "weight matrix" inGMM
estimation.We
definethe innovation
ua
=
Qi+
en- Arellanoand Bover
(1995) eliminate the fixed effect aj in (1)by
applying Helmert's transformation
T
-t
ul Utt
- ^7—7
("j.t+i H 1-Uix) t=
ir-1
T-t+l
instead offirst differencing.^
The
transformationproduces
Vu
=
P^zt+
e*t> <=
1,.. . ,T
-
1where
Xj=
y*t-\- Let z^t=
(j/io, - - ,yit-i)Our
moment
restriction issummarized
by
E[zite*n]=0
<=
l,...,r-l
It
can be
shown
that,with
the homoscedasticityassumption
on
en, the optimal "weightma-trix" is proportional to a block-diagonal matrix, with typical diagonal block equal to E[zitz[^.
Therefore, the optimal
GMM
estimator is equal toET
—1 ^fry *1=1 ^t Ptyt
^GMM
(2)where
x^=
{^ur
,<;)', Vt=
iVur
^Vnt)'-- ^i=
{zu,--- ,Znt)\and
Pt=
Zt{Z\Zt)~^
Z[Now,
let b2sis,t denote the2SLS
of y*on
x*:^VPiVl
^2SLS,t t
=
1,...,r-
1'Arellano and Bover (1995) notes that the cfficienc)' ofthe resultant
CMM
estimator is not afTcrted whetherIfEit are i.i.d. across t, then
under
thestandard
(first order) asymptoticswhere
T
is fixedand
n
grows
to infinity, it canbe
shown
thatV^
(b2SLS,l -/?,-••MSLS^T-I
-/?)->
AA
(0,*)
,where
^
isa
diagonal matrixwith
thet-thdiagonal elements equaltoVar
{en)/ (plim n~^x*'Ptx*).
Therefore,
we
may
consider aminimum
distance estimator,which
solves-1
mm
b\
b2SLS,T-l~^
)
(xrPixj)
-1 (x5,'_jPr-l
2:^-1 )' b2SLS,\-b
\
\
hsLS,T-l
~b
J
The
resultantminimum
distance estimator is numerically identical to theGMM
estimator in(2):
Tj='<Ptx;,-'b2SLS,i
boMM =
Z^t=l ^f -^t^t
(3)
Therefore, the
GMM
estimatorbcMM
n:iaybe understood
as alinearcombination
of the2SLS
estimators b2SLS,i-,--- 7^25LS,r-i- It has long
been
known
that the2SLS
may
be
subject tosubstantial finite
sample
bias. SeeNagar
(1959),Rothenberg
(1983),Bekker
(1994),and
Donald
and
Newey
(1998) for related discussion. It is therefore natural to conjecture that a linearcombination
ofthe2SLS
may
be
subject to quite substantial finitesample
bias.3
Bias Correction using Alternative
Asymptotics
In this section,
we
consider the usualdynamic
panelmodel
with
fixed effects (1) using thealternative asymptotics
where
n
and
T
grow
to infinity at thesame
rate.Such approximation
was
originally developedby Bekker
(1994),and
was
adopted
by
Alvarezand
Arellano (1998)and
Hahn
and
Kuersteiner (2000) in thedynamic
panel context.We
assume
Condition
1en
~
A/^(0,a^) overiandt.
We
alsoassume
stationarityon
yifiand
normalityon
a,^:Condition
2 y,o|«:~
A/"(^,
^)
and
Or^
N
{0,al).In order to guarantee that Z'tZt is nonsingular.
we
willassume
that^This condition allows us to use lots ofintermediate results in Alvarez and Arellano (1998). Our results are expected tobe robust to violation ofthis condition.
Condition
3
^
^
p. where<
p
<l.^
Al\'arez
and
Arellano (1998)show
that,under
Conditions1-3,
v^
(bGM^f
-(3-^{l+
,3)]^-
.'V (0.1-
0') , (4)where
bcMM
is defined in(2)and
(3).By
examining
theasjTnptotic distribution (4)under
suchalternative asjTnptotic
approximation
where
n and
T
grow
to infinity' at thesame
rate,we
can
develop a bias-corrected estimator. This bias-corrected estimator is given
by
1
'GA/M
-bcMM
+
Combining
(4)and
(5).we
can easily obtain:Theorem
1Suppose
that Conditions1-3
aresatisfied. Then,y/nT
[hcMM
—
!3)(5)
.V(0,l-/32).
Hahn
and
Kuersteiner (2000) establishby
aHajek-type
convolutiontheorem
that^^Z"(0, 1—
/3^)isthe
minimal asymptotic
distribution.As
such,thebias correctedGMM
is efficient.Although
the bias corrected
GMM
estimatorbcMM
doeshave
a desirable propertyunder
the alternativeasjTnptotics, it
would
notbe
easy to generalize thedevelopment
leading to (5) to themodel
invohang
other strictlyexogenous
\'ariables.Such a
generalizationwould
require thecharac-terization ofthe asjTiiptotic distribution ofthe
standard
GMM
estimatorunder
the alternativeas^Tnptotics,
which
may
notbe
trivial.We
therefore considerehminating
biases in b^sis.tin-stead.
An
estimator thatremoves
the higher order bias ofb2SLS,t is theNagar
type
estimator.&JV,agar.t
x'/PfX^
—
Xtx'/Mtx^'
where
Alt=
i
—
Pt: ^t^
n-K*
- ^^'^^*
denotes thenumber
ofinstruments forthe t-ih equation.For
example,we
may
use At=
^^'j^^2 ^^ ^°Donald
and
Newey
(1998).We
may
also useLIML
for the f-th equation, in
which
case Atwould be
estimatedby
the usualminimum
eigenvaluesearch.
We
now
examine
properties ofthe correspondingminimum
distance estimator.One
possibleweight
matrix
forthisproblem
is givenby
{xl'Prxl-Xix\'Mrxl)
-1
{^T-l^T-l^T-l
~
^T-l^T-l-^^T-i^T-l)
'.Alvarezand Arellano (1998) onlyrequire
<
p<
oo.We
requirep<
1 toguarantee that Z'lZtissingularforWith
this weight matrix, it canbe
shown
that theminimum
distance estimator is givenby
One
possibleway
toexamine
the finitesample
property of thenew
estimator is to use thealternative asymptotics:
Theorem
2Suppose
that Conditions 1-3 are satisfied. Also suppose thatn
and
T
grow
to infinity at thesame
rate. Then,\/nT
{bj^agar—
P) —*N
(0,1—
/3 ).
Proof.
Lemmas
10,and
11 inAppendix
A
alongwith
Lemma
2 ofAlvarezand
Arellano(1998) establish that 7
<Pte*t
'-^^t'Mts: -> AT 0,VnT^K
'''
n-Kt
' ^V
V
' 1-
/3^and
a^
-^
y
(x'Ptxt
-
-^i-x/Mtx;
, i2'from which
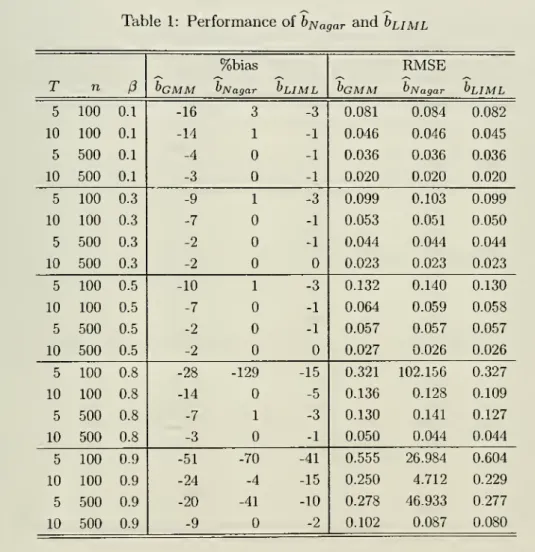
the conclusion follows.In
Table
1,we summarized
finitesample
properties of h^agarand
buML
approximated
by
10000
Monte
Carlo runs.^ Here,buML
is the estimatorwhere
As in (6) are replacedby
the corresponding "eigenvalues". In general,we
find that bj^agarand buj^i
successfullyremove
bias unless /? is close to
one
and
thesample
size is small.4
Bias Correction
using
Higher
Order
Expansions
In the previous section,
we
explained the bias of theGMM
estimator as a result ofthe biasesof the
2SLS
estimators. In this section,we
consider elimination of the biasby
adopting thesecond order Taylor type approximation.
This
perspective hasbeen adopted
by Nagar
(1959),and Rothenberg
(1983).For this
purpose
we
first analyze the second order bias ofa
generalminimization
estimator 6 ofasingleparameter
(3&R
definedby
b
=
argmin
Qn
(c) (7)for
some
C
C
M.The
score for the minimizationproblem
isdenoted
by Sn
(c)=
dQn
(c)/dc.The
criterion function isassumed
tobe
oftheform
Q„
(c)=
g
(c)'G
{c)~^g
(c)where
g(c)and
G(c)
are defined in Condition 7.The
criterion functiondepends on
primitive functions 8 {wi,c)and
V(tt;,,c)mapping M^
x
M
into R"^ ford
>
1,where
Wi are i.i.d. observations.We
assume
that
E
[6 {xL\,p)]=
0.We
impose
the following additional conditionson
w^,6,and
ip.Condition
4 The random
variableswi
are i.i.d.Condition
5
The
functions 6{w,c)and
tj;{w,c) are three times dijferentiable in c for c£
C
where
C
CM
is acompact
set such that (3E
intC.
Assume
that 6 {wi,c)and
tp {iVi,c) satisfy aLipschitz condition \\6{wi, ci)
—
6{wi,C2)||<
Ms
(wi)|ci—
C2Iforsome
function Ms{.) : IR'^—
>R
and
ci,C2G
C
with thesame
statement holding for ip.The
functions M5{.)and M^(.)
satisfyE
[Me
{wi)]<
00and
E
|M^
(wi)P
<
00.Condition
6
Let Sj{wi,c)=
d^6{wi,c)/dc^, '^ {wi,c)=
ip {wi,c)il) {wi,c)'and
'^j{wi,c)=
d^^
{wi,c)jdcK
Then, Xj (c)=
E
[6j {wi,c)],and
Aj
(c)=
E
[^j (fOi, c)] all existand
arefiniteforj
=
0,...,3.For
simplicity,we
use the notation Xj=
Xj (/3),Aj
=
Aj
(/?),A
(c)=
Xq(c)and
A(c)
=
Ao(c).Condition
7 Letg{c)
=
-Yl'l^iS{wi,c),Qj {c)=
^
Er=i
^j (""^^.c),G
(c)=
^
E"=i
^
(^^i>c)VK-,c)'
an
dGj{c)
= ^Er=i^iK,c).
Theng{c)
^
E[6iw„c)],
g,{c) -^E[6,{w„c)],
G(c)
E
['^{wi,c)],and
Gj
(c)^
E
[i>-j{wi,c)] for allceC.
Our
asymptotic approximation
of the second order bias of b isbased
on an approximate
estimator b such that b—
b=
Op (^~^) -The
approximate
bias ofb is then defined asE
b—
(3while the original estimator h
need
not necessarily possessmoments
ofany
order. In order tojustify our
approximation
we
need
to establish that b is i/n-consistentand
thatSn
(b)=
withprobability tending to one. For this
purpose
we
introduce the following additional conditions.Condition
8
(i) There existssome
finite<
M
<
00 such that the eigenvalues ofE
[^(zt;,-,c)] are contained in thecompact
interval[M^-',M]
for all cG
C;
(ii) the vectorE[8
{w^,c)\=
ifand
only ifc=
(3; (Hi) X\ 7^ 0.Condition
9
There existssome
r/>
such thatE
Ms
{w^) ^suPcecll^K'C)
|2+T7<
00,and
E
suPcGcllV'(^«i,c)f+''<
00,E
M^
(u'i)^2+7,<
00,<
00.Condition 8 is
an
identification condition that guarantees the existence of a unique inte-riorminimum
ofthe limiting criterion function. Condition 9 corresponds toAssumption
B
ofAndrews
(1994)and
is used to establish a stochastic equicontinuity property of the criterion function.Lemma
1Under
conditions 4 - 9, b defined in (7) satisfies y/n{b—
(3)=
Op(l)and Sn
(6)=
with probability tending to 1.
Proof.
SeeAppendix
B.Based on
Lemma
1 the first order condition for (7) canbe
characterizedby
A
second order Taylor expansion of (8)around
/3 leads toa
representation oi b—
(3up
toterms
oforder Op{n~'^). InAppendix
B, it isshown
thatVS(6 -
ffl=
-i*
+
-L (-ir
+
i*=
-
i;*')
+
Op(-1=)
(9)(See Definition 2 in
Appendix
B
for the definition of*,T,$,H,
and
F.) Ignoring the Op(A^j
term
in (9),and
taking expectations,we
obtain the"approximate
mean"
of ^/n{b—
(3).We
present the second order bias ofb in the next
Theorem.
Theorem
3
Under
Conditions 4-9, the second order biasofb
is equal to(10)
where
E[T]
=
2tTace{A''E
and
E[^=]
=
SX[A-^E
E[^]
=
0, f\cf"1\6i^
j-
2X[A-^E
[^p^i>',A-H^]-
trace(A-^AjA-^i?
[6i6'^) ,A-^Ai
-
4XjA'^E
[6^X\A-'^^P,^'^A^^Ai
and
-SX'^A-^E
[6i6'^A-^AiA-^Ai
+
AX'^A'^E
[<5,<5',]A^^Aa,
E[<l>^]=iX[A-^E[6^6'^A-'X^,
Proof.
SeeAppendix
B.Remark
1For
theparticular casewhere
ip,=
6i, i.e.when
b is aCUE,
the biasformula
(10)exactly coincides with
Newsy
and
Smith's (2000).We
now
applythese generalresults to theGMM
estimator ofthedynamic
panel model.The
GMM
estimatorbcMM
can
be
understood
tobe
asolution to the minimizationproblem
mm
c \
n
m,
(c)for c
G
C
where
C
issome
closed intervalon
the real line containing the trueparameter
valueand
m,
(c) V ^^.T-\ [vIt-i C X.:T-aJ
T7 ^-^ 2=1 Zi\Zii Zx,T~\Z,7-_jWe
now
characterize the finitesample
bias of theGMM
estimatorbe
mm
of thedynamic
Theorem
4
Under
Conditions 1-3 the second order bias ofbcMM
is equal toB1+B2
+
B3
f
1+
-n
\n
(11)where
zx sBi
=
Tr^
ELY
trace((rr)''
T-")
B2
=
-2Tf
zti
EL7
rr' (rr)-'
r--
(rf
)-ir
^3
=
Tr^
^^j-/ ^fr^i
rr' (rr)-'
-B3.1 (t,s)(rf
)-irr
.andTi
=
Er=i'rr'(rfr^rr.
Proof.
SeeAppendix
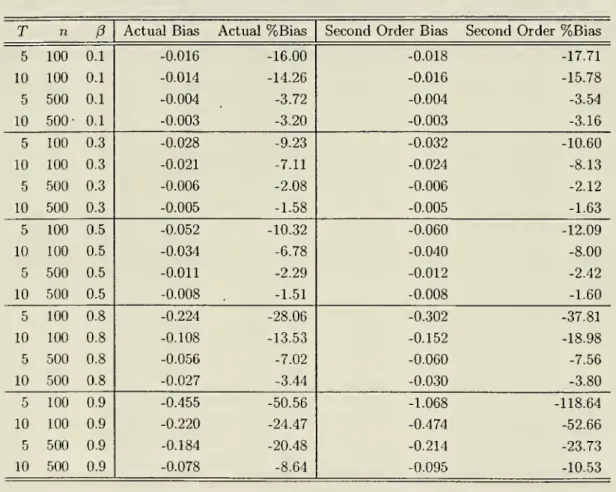
C.In
Table
2,we
compare
the actualperformance
oihcMM
and
theprediction ofits biasbased
on
Theorem
4.Table
2 tabulates the actual biasofthe estimatorapproximated
by
10000
Monte
Carlo runs,
and compares
it with the second order biasbased on
theformula
(11). It is clearthat the second order theory does a reasonably
good
job exceptwhen
p
isclose to theunitcircleand
n
is small.Theorem
4 suggestsa
naturalway
of eliminating the bias.Suppose
thatBi/B2,Bz
are>/n-consistent estimators ofB-[,B2,B3.
Then
it is easy to seethatt>BCi
—
t>GMM
{B-i+
B2
+
Bsj
(12)is first order equivalent to
bcMM,
and
hassecond
order bias equal to zero. Define Tf^=
n-'
HU
^rt^tM""
=
ri-^EIli
^rtKv
^\T
=
«"'
ELi
<t^l^u^is and
n
i=l
where
e*j=
y*^—
x*^bGMM
LetBi,B2
and
.63be
definedby
replacingrj^,rf^,r"^^ and
53,1(f,s)
by
ff
,fr,%"
and
53,i(i,s) inBi,B2 and
S3-Then
theBs
will satisfy the -yn-consistency requirement,and
hence, theestimator (12) willbe
first order equivalent tobcMM
and
willhave
zero second order bias.Because
thesummand
E
[z^tx*i]'E
\z,t,z\^" 6*iZu\'^K^^Zisz[^E[z,sz[,]~E
[zisX*,]in the
numerator
ofi?3 is equal to zero for s<
i,we
may
instead considerbBC2
=
bcMM
[Bi
+
B2
+
B3
where
lis
=
tr^
eL"/
eI='
f
r' (f
f
) "' ^3,1(*,s)(f
r
) ''f
r-Second
order asymptotic theory predictsapproximately
that 6j3C2would be
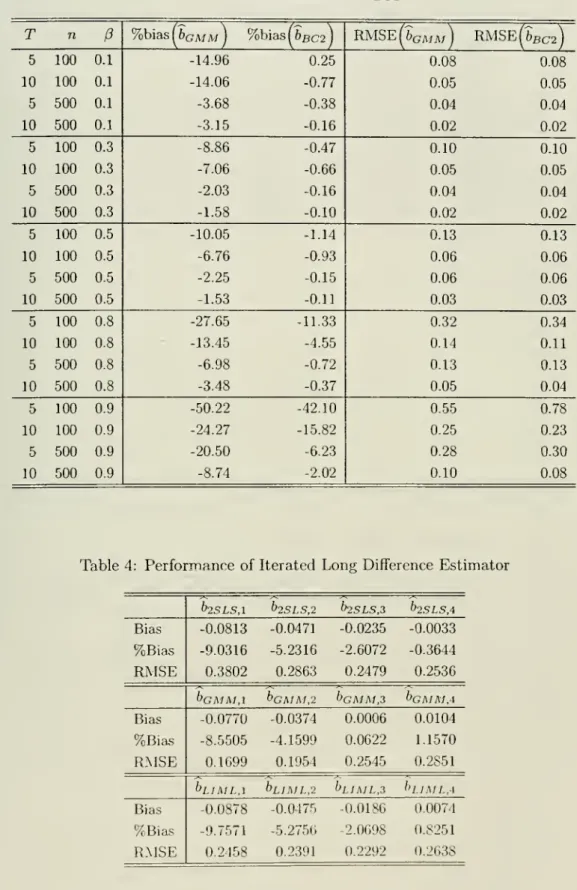
relatively freeofbias.
We
examined whether
such prediction is reasonably accurate in finitesample
by
5000
Monte
Carlo runs.^ Table 3summarizes
the properties of 6bc2-We
have
seen inTable
2 that the second order theory is reasonably accurate unless /3 is close to one. It is therefore sensible to conjecture thatbBC2 would have
a reasonable finitesample
bias property as long as /3 is nottoo close to one.
Such
a conjecture is verified inTable
3.5
Long
Difference
Specification:
Finite
Iteration
In previous sections,
we
noted that even the second order asymptotics "fails" tobe a
good
approximation
around
/?~
1. Thisphenomenon
can
be
explainedby
the 'Sveak instrument" problem. See Staigerand
Stock (1997). Blundelland
Bond
(1998) argued that theweak
instru-ment
problem
canbe
alleviatedby assuming
stationarityon
the initial observation yjo-Such
stationarity condition
may
or"may
notbe
appropriate for particular applications. Further,sta-tionarity
assumption
turns out tobe
apredominant
source ofinformationaround
/?«
1 asnoted
by
Hahn
(1999).We
therefore turn tosome
othermethod
toovercome
theweak
instrumentproblem around
theunit circle avoiding thestationarity assumption.We
argue thatsome
ofthedifficulties of inference
around
the unit circlewould
be
alleviatedby
taking a long difference.To
be
specific,we
focuson
asingleequationbased
on
the longdifferenceVtT
-
yn
=
P
iViT-i-
Vio)+
{£iT-
£n)
(14)It is easy to see that the initial observation y,o
would
serve as a valid instrument.Using
similar intuition asin
Hausman
and
Taylor (1983) orAhn
and Schmidt
(1995),we
can
see that2/iT-i
-
l3yiT-2, , yi2—
Pyn
would be
valid instruments as well.5.1
Intuition
In
Hahn-Hausman
(HH)
(1999)we
found that the bias of2SLS
(GMM)
depends on
4fac-tors: "Explained" variance of the first stage
reduced form
equation, covariancebetween
thestochastic disturbance ofthe structural equation
and
the reducedform
equation, thenumber
ofinstruments,
and sample
size:„,:_,
_
m
~
1
(number
ofinstruments) x ("covarianc e")n
"Explained" variance of the first stagereducedform
equation"The difTcrence of Monte Carlo runs here induced some minor numerical difference (in properties of
bcMM)
Similarly, the
Donald-Newey (DN)
(1999)MSE
formula
depends
on
thesame
4factors.We
now
consider first differences
(FD)
and
long differences(LD)
to seewhy
LD
does somuch
better inour
Monte-
Carlo experiments.Assume
thatT —
A.The
first difference setup
is:2/4
-
Z/3=
/?(ya-
y2)+
£4-
£3 (15)For the
RHS
variables it uses the instrument equation:ys
-
y2=
(/?-
1)2/2+
a
+
£3Now
calculatetheR^
forequation (15) using theAhn-Schmidt
(AS)
moments
under
"idealcon-ditions"
where
you
know
(3inthe sense that the nonlinearrestrictionsbecome
linear restrictions:We
would
then
use (y2, yi,yo,cv-f-ei,a
-I-£2) asinstruments.Assuming
stationarity forsymbols,but
not using it as additionalmoment
information,we
can
writeyo
=
Yzrp
+
^0'where
^0^
(0' -iln^ )• ^^ ^^^ t>eshown
that the covariancebetween
the structure errorand
the first stage error is
—
o"^,and
the "explained variance" in the first stage is equal tocr'^-^r^-Therefore,the ratio that determines the bias of
2SLS
is equal to-a2
l+
p
2^±1
1-/3'
which
is equal to—19
for /?—
.9. Forn
=
100, this implies the percentage bias ofNumber
ofInstruments—19
,„„ 5—19
,„„ ,^^ ^^:^ ;
—
7; TT-
X
100=
——
-—
r x
100=
-105.56
Sample
Sizep
100 0.9We
now
turn to theLD
setup:y4-yi
=
P
(ys-
yo)+
£4-£i
It
can be
shown
that the covariancebetween
the first stageand
second stage errors is—
/3^(T^,and
the "explained variance" in the first stage is givenby
—a
(2/3^-
4/3''-
2/3^+
4/32+ 4p-2p^
+
6)a^
+
P^-p^ +
2-
2/3^(-2/3-3
+
/?2)a2-l+/32
2
where
a^= %.
Therefore, the ratio that determines the bias is equal to2
{-2p-3 +
p^)a^-\+p^
(2/3^
-
4/3^-
2/3'^+
4/32+
4/3-
2/3^+
6)a'^+
/?^-
p'^+
2-
2p^which
is equal to2.570
3x10-''
-.374
08
+
a2
+
4.8306x
IO-2for /?
=
.9.Note
that themaximum
value that this ratiocan
take in absoluteterms
is-.37408
which
ismuch
smallerthan
—19.We
thereforeconclude that the longdifferenceincreasesi?^but
decreases the covariance. Further, thenumber
of instruments is smaller in the long differencespecification so
we
should expecteven
smaller bias.Thus,
all ofthe factorsin theHH
equation,except
sample
size, cause theLD
estimator tohave
smaller bias.5.2
Monte
Carlo
For the longdifferencespecification,
we
can
usey^o aswell asthe "residuals" yir-i—
l3yiT-2-, -• -,yi2—f3yii as validinstruments.^
We
may
estimatep
by
applying2SLS
tothelongdifferenceequa-tion(14) usingyioasinstrument.
Wemaythenuse
(yio,yiT-i-b2SLsyiT-2,
,yi2-hsLsyn)^
instrument to the long difference equation (14) to estimate p. Call the estimator b2SLS,i-By
iterating this procedure,
we
can define 62SL5,2, i>2SLS,Si Similarly,we
may
first estimate /?by
the Arellanoand Bover
approach,and
use (yio,yiT-i-bGMMyiT-2,
--
,yi2-bcMMynj
asinstrument to the long difference equation (14) to estimate p. Call the estimator 6251,5,1•
By
iterating this procedure,
we
can
definebGMM,2, ^GMM.s,
-- Likewise,we
may
first estimateP
by
huML,
and
use [yio,yiT-i-
buMLyiT-2,
,yi2-
buMLynj
as instrument to the longdifference equation (14) to estimate p. Call the estimator
bijML^-
By
iterating this procedure,we
can
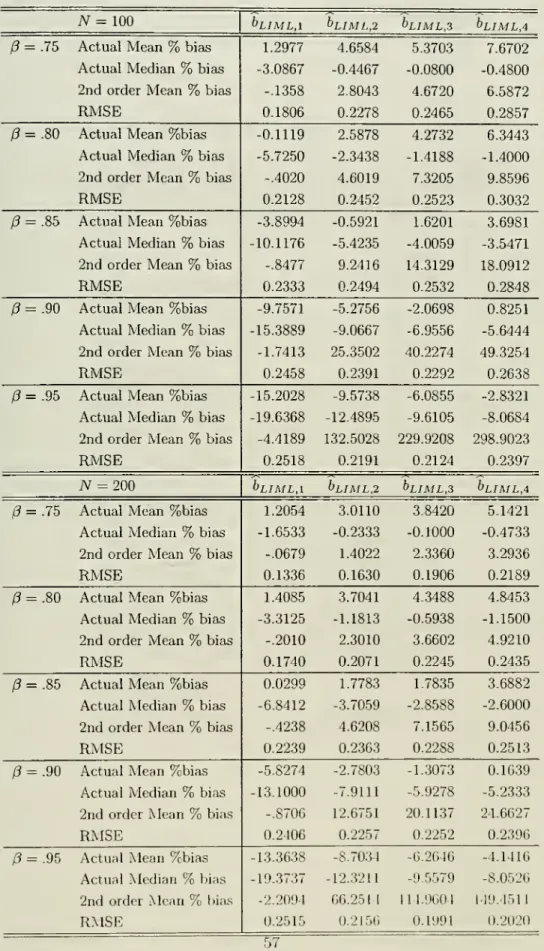
define bLiML,2, bLiML,3, --We
found
that such iteration of the long differenceesti-mator
works
quite well.We
implemented
these procedures forT
=
5,n
=
100,p
=
0.9and
(j^
=
o"^=
1.Our
finding with5000
monte
carlo runs issummarized
in Table 4. In general,we
found
that the iteration ofthe long difference estimatorworks
quite well.^We
compared
theperformance
ofour estimator with Blundelland Bond's
(1998) estimator,which
uses additional information, i.e., stationarity.We
compared
four versions oftheirestima-tors bsBi, ,
bsBi
with the long difference estimatorsbu
m
lATbu
m
L,2,bu
m
l,2,- For the exactdefinition of 6bbi, , 6bb4, see
Appendix
E.Of
the four versions,6bb3 and bsBi
are the onesreported in their
Monte
Carlo section. In ourMonte
Carlo exercise,we
setp
=
0.9, a^=
\, Q.i r^N
{0,1).Our
findingbased
on 5000
Monte
Carlo runsis contained inTable
5. In terms ofbias,
we
find that Blundelland Bond's
estimators6bb3 and 6^54 have
similar properties as thelong difference estimator(s), although the former
dominates
the latter interms
of variability.We
acknowledgethat theresidualinstruments are irrelevant underthe near unity asymptotics.^Second order theory does not seem toexplain the behavior ofthe long difference estimator. In Table 7, we
comparethe actual performance ofthe long difference based estimators with the second order theory developed
(We
note, however, that6bbi and 6bs2
are seriously biased.This
indicates that the choice ofweightmatrix
matters inimplementing
Blundelland
Bond's
procedure.)This
result is notsurprising
because
the long difference estimator does not use the information contained in theinitial condition. See
Hahn
(1999) for a related discussion.We
alsowanted
toexamine
thesensitivity ofBlundell
and
Bond's
estimator to misspecification, i.e., nonstationary distributionofyio- For this situation the estimator will
be
inconsistent. In order to assess the finitesample
sensitivity,
we
considered the caseswhere
yio~
fj3k~
'j^L
)Our
Monte
Carlo resultsbased
on 5000
runs are contained inTable
6,which
contains results for (3p—
.5and
^p
=
0.We
find that the long difference estimator is quite robust,
whereas 6^53 and 6bb4
become
quitebiased as predicted
by
the first order theory.(We
note thathBB\
and
6bb2
are less sensitiveto misspecification.
Such
robustness consideration suggests that choice ofweightmatrix
is notstraightforward in
implementing
Blundelland Bond's
procedure.)We
conclude that the longdifference estimator
works
quite welleven
compared
to Blundelland
Bond's
(1998) estimator.^6
Near
Unit
Root
Approximation
Our
Monte
Carlo simulationresultssummarized
inTables1, 2,and
3 indicate thatthe previously discussedapproximations
and
the biascorrections that arebased
on
them
do
notwork
well near the unit circle.This
isbecause
the identification of themodel becomes
"weak"
near the unitcircle. See Blundell
and
Bond
(1998),who
related theproblem
to the analysisby
Staigerand
Stock (1997). In this Section,we
formallyadopt approximations
local to the points in theparameter
space that are not identified.To
be
specific,we
considermodel
(1) forT
fixedand
n
—
> 00when
also /?„ tends to unity.We
analyze the bias of the associatedweak
instrument limit distribution.We
analyze the class ofGMM
estimators that exploitAhn
and
Schmidt's (1997)moment
conditionsand
show
that a strict subset of the full set ofmoment
restrictionsshould
be
used in estimation in order tominimize
bias.We
argue that this subset ofmoment
restrictions leads to the inference
based
on
the "long difference" specification. FollowingAhn
and Schmidt
we
exploit themoment
conditionsE[uiu[]
=
{al+
cTl)l+
alll'
E
[uiyiQ] cr.ayo-with
1=
[1,.-.,1]' a vector ofdimension
T
and
Uj=
[u,i,•j^^zt]be
writtenmore
compactly
asThe
moment
conditions canchE[uiu'^\ 2 vech/ 9 vech(7
+
ll')E
[uiyio]=
<^e+
^a
+
O'oyo1
(16)
^We
did try tocompare thesensitivity ofthe twomoment
restrictionsby implementingCUE.
but we experi-enced some numericalproblem. Numerical problem seemstobe an issuewithCUE
in general. Windmeijer (2000) reports similar problemswithCUE.
where
theredundant
moment
conditionshave
been eHminated
by
use ofthevech
operatorwhich
extracts the
upper
diagonal elementsfrom a symmetric
matrix. Representation (16)makes
itclear that thevector b
E
R^(^+^)/2+^
is contained ina
3 dimensionalsubspace which
is anotherway
ofstating that there areG
=
T{T
+l)/2
+
T
—
3 restrictionsimposed
on
b.This statement
is equivalentto
Ahn
and
Schmidt's (1997) analysis ofthenumber
ofmoment
conditions.GMM
estimators are obtainedfrom
themoment
conditionsby
eliminating theunknown
parameters
(T^,<y1,and
Oay^.The
setofallGMM
estimators leadingto consistent estimatesof/?can
thereforebe
describedby
a{T{T
+
l)/2+
T)
x
G
matrix
A
which
contains all the vectorsspanning
the orthogonalcomplement
of6.This
matrix
A
satisfies b'A=
0.For our purposes it will
be
convenient to chooseA
such thatb'A
=
[EuitAuis,E
{uiT^Uij),EuiAuik,
EAu'^yio] ,s
=
2,...,T;i=
l,...s-2;j=
2,...,r-l;A;=
2,...,Twhere
Aui
=
[ui2—
un,
...,Uix—
UiT-i] Itbecomes
transparent thatany
other representationofthe
moment
conditionscan
be
obtainedby
applying acorresponding nonsingularlinear operatorC
tothematrix
A.Itcan
be
checkedthat thereexistsa nonsingularmatrix
C
such that b'AC
=
is identical to themoment
conditions (4a)-(4c) inAhn
and Schmidt
(1997).We
investigate the properties of (infeasible)GMM
estimators basedon
E
[u^tAuis (/?)]=
0,S
[u^T^Uij (/?)]=
0, £;[u,Au,k (/?)]=
0,S
[Vro^u.t (/?)]=
obtained
by
settingAuu
{(3)=
Ayu -
PAyu-i-
Here,we
assume
that the instrumentsuu
areobservable. Let
gn
{(3) denote acolumn
vector consistingoiuuAuis
(/3) ,UixAuij
(/?)
,UiAuik
(/?).Also let g,2{(3)
=
[y^oAu,{f3)]. Finally, letgn{P)
=
n-^^j:^^,
[g^l (P)',9^2 {P)']'
with
theoptimal weight
matrix
fin=
E
[gi (/?„) gi (/?„)'].The
infeasibleGMM
estimator of a possiblytransformed set of
moment
conditionsC'gn
(/?) then solvesP2SLS
=
argmin
g„(/3)'C
(C'C!„C)+ C'gn
{(3) (17)where
C
is aG
x rmatrix
for 1<
r<
G
such thatC'C
=
U
and rank (c{C'Q,C)'^ C'\
>
1.We
use [C'Q.C)'^ to denote theMoore- Penrose
inverse.We
thus allow the use of a singularweight matrix.
Choosing
r lessthan
G
allows to exclude certainmoment
conditions. Letki
=
-dgii{0)/dp,
/,,2=
-%2(/?)/a/?,
and
/„=
n-^^Z^^i
[fuJ^]'-
The
infeasible2SLS
estimator canbe
written asP2SLS
-Pn=
(fnC
(G'fi„G)+
C
fX'
f^C
(C'fi„G)+ C'gn
iPn) (18)
We
arenow
analyzing the behavior of /?2sl5-
Pn
under
local to unity asymptotics.We
make
the following additional assumptions.^
Condition 10
Letyu
=
Oi+
PnVit-i+
^it withen
~
A'' (0,cr^), ai^
N
(0,a^)and
y^o~
A'' (
^%
,j^^
],where
/?„=
exp(—
c/n) forsome
c>
0.Also note that
Ayu
=
Pl^^Vio+
^it+
^
El=i
Pn'^^u-s
+
Op(n-^)where
r?,o~iv(0,(^„-l)y
(1-/32)).
Under
the generatingmechanism
described in the previous definition the followingLemma
can
be
established. 'Lemma
2
Assume
/?„=
exp(—
c/n) forsome
c>
0.For
T
fixedand
asn
-^ ooi=l i=l
and
where[!i'^,i'y]
~
iV(0,E) withE
Ell Ei2 E21 E22
and
Ell=
^I, E12=
SMi
E22=
SM2,
where2 2
Ml
=
-1 1
and
S12=
E21.We
also have1
-1
M2
2-1
•--1
-1 2 1^
\ ^ E22+
o(l)Proof.
SeeAppendix
D.Using
Lemma
(2) the limiting distribution ofP2SLS
~
Pn
is stated in the next corollary. For thispurpose
we
define theaugmented
vectors^f
=
[O,...,0,^^]and
^*
=
[O,...,0,^^]and
partition
C
=
[C'qjC{]' such thatC'^f
=
C[^^. Let rj denote therank
of Ci.Corollary
1 LetP2SLS
" Pn
^^ given by (IS). IfCondition 10 is satisfied thend
SiCl (C1S22C1)
C{^y
P:2SLS-
1c;ci(C5E22Circ;e
=
^V(C,S22)
(19)Unlike the limiting distribution for the
standard
weak
instrument problem,X(C,
E22), asdefined in (19), is
based
on
normal
vectors thathave
zeromean. This degeneracy
is generatedby
the presence of the fixed effect in the initial condition, scaledup
appropriately to satisfythe stationarity requirement^'' for the process yu- Inspection ofthe proof
shows
that the usualconcentration
parameter
appearing in the limit distribution isdominated by a
stochasticcom-ponent
related tothe fixedeffect.This
situationseems
tobe
similar totime
seriesmodels
where
deterministic trends can
dominate
theasymptotic
distribution.Based
on
Corollary 1,we
define thefollowing classof2SLS
estimatorsfor thedynamic
panelmodel.
The
class contains estimators that only usea
nonredundant
set ofmoment
conditionsinvolving the initial conditions yiQ.
Definition
1 LetP2SLS
^^ defined as P^gj^g=
argmin^
^2,n(/?)'Ci
lC{QCi)
C[g2,n{0),where
92,71(0)
=
Ti~^'^Yl^=\ 9i2{P)r^
is asymmetric
positive definite(T
—
1)x
(T
—
1)matrix
ofcon-stants
and C\
is a[T
—
\)X
r\matrix
offullcolumn rank
rj<
T
—
1 such thatC[Ci
=
I.Next we
turn tothe analysis ofthe asymptotic bias for the estimatorP2SLS
^^thedynamic
panel model. Since the limit only
depends on
zeromean
normal
random
vectorswe
can apply
the results ofSmith
(1993).Theorem
5 LetX*
(Ci,QJ
be the limiting distribution ofP2SLS
~
1 i''^ Definition 1under
Condition 10. Let
D
=
[D
+
D')/2, whereD
=
(c{QCi]
C[M[Ci.
Then
[x
(c„n)] =
A-
f;
<MWc»
(fl,/n
-
A- {c[acX')
fc=0 \2)\+k'^- V
^ ^
/
E
'"An alternative way to parametrize the stationarity condition is to set yu
=
(!—/?„)Qi+
(B^yu-i+
en,£it
~
N
(O.CTj) ,Qi~
N
{0,al) andy.o~
N
iOi,y^^
j with/3„=
exp(-c/n).It canbeshownthatanestimatorsoley based on the
moment
condition E[uii^Uik(Po)]=
is consistent. Restrictingattention toestimators that are ba.sed on allmoment
conditions except the conditionE[uiAu,k(/3o)]=
0, onecan show thatwherefi
=
It-icry/2.Estimatorsintheclass /Jjs^s definedinDefinition1 canbeanalyzed bythesame methodsasunderthestationarityassumptionsdiscussedin thepaper. Theirlimiting distributions aredenotedby
X'
(Ci, ).
Moments
oiX*
areintractably complicated unlessQ,=
It-\- Then the mean of^*
(Ci,/t-i) is givenby^i'D^J
„,r-l
r-l
^l'n n'D^i_,_^,r-l
r-1
r+1
'^'(^-•^
+
i'^)-7TT^"^^^^~^'^-
+
'>~-with
D
=
[D+
D
)/2,D
=
C[MiC-i and /i=
C\ij.. Whilefindingan exact analyticalminimum
ofthe abovebiasexpression as a function ofthe weight matrix is probably infeasible due to the complexity of the formula, one sees relatively easily that for large
T
theminimum
must approximately be achieved forC
=
lr~i, thus leading approximatelytothe long difference estimator.where
n
=
rank(Ci),
(a)j, is thePochammer
symbol
r{a
+
b)/r{b),C^^{.,.)
is a top order invariantpolynomial
defined byDavis
(1980)and A
is the largest eigenvalue of(c[ClC]\
.The
mean
E
X
[Ci,^)
existsforr\>\.
Proof.
SeeAppendix
D.The Theorem
shows
that the bias of /?2sl5both depends on
the choice ofC\
and
the weightmatrix
^.Note
foreexample
thatE[X{C\,It-\)]
=
txD/r\.
The
problem
ofminimizing
the biasby
choosing optimal matricesC\
and
Vtdoes
notseem
to lead to
an
analytical solutionbut
could in principlebe
carried out numerically for a givennumber
oftime
periodsT. For ourpurpose
we
arenotinterested insuchan
exactminimum.
We
show
however
that fortwo
particular choices ofQ.where
Q,=
It-\ ox Q.=
II22and
subsequent
minimization
overC\ an
analytical solution for the biasminimal
estimator canbe
found. Itturns out that the
optimum
is thesame
forboth
weight matrices.The
theorem
alsoshows
that the
optimum
canbe
reasonably wellapproximated
by
a procedure that is very easy toimplement.
Theorem
6
LetX
(Ci,Qj
be as defined in Definition 1. LetD
=
{D
+
D') /2where
D
=
{C[
ncX^
C[
M[
Ci
.Then
c
st'i'^c I\E{^(CuIt^,)]\=
min
\E[X
{Cu^22)]\
-Oi 5.1. OjL-i
=
J7-j Ci s.i. GjGi=irjri=l,..,r-l Ti
=
l,..,T-lMoreover,
E[X{CiJT-i)]
=
tTD/r^.
Let
CI
=
argmin^^j \E[X{CiJt-\)]\
subject toC[Ci
=
Ir^,ri=
1,..,T-
1.Then C^
=
Piwhere
/9j is the eigenvector corresponding to the smallest eigenvalue li of
D.
Thus,mincitx D/ri
=
min/,/2.
As
T
-^ 00 the smallest eigenvalue ofD,
minli—
> 0. Let 1=
[1,...,1]' be aT—1
vector.Then
forCi
=
l/(l'l)^/^ itfollows that trD
-^ asT
-^ 00.Theorem
6shows
thattheestimator thatminimizes
thebiasisbased
onlyon a
singlemoment
condition
which
is a linearcombination
ofthemoment
conditions involving j/jQ as instrumentwhere
the weightsare the elementsoftheeigenvectorp^ correspondingtothesmallesteigenvalueof
(Ml
+
Mj)
/2.This
eigenvalue canbe
easilycomputed
forany
given T.The
Theorem
alsoshows
that at least for largeT
a
heuristicmethod
which
puts equal weighton
allmoment
conditions leads to essentially the
same
bias reduction as the optimal procedure.The
heuristicprocedure
turnsoutbe
equal tothemoment
conditionE
{{uiT—
"n)
yio]which can be motivated
by
taking"long difTerences" ofthemodel
equation yu=
cti+
/?„yit_]+
en
i.e.by
consideringIt can also
be
shown
that a2SLS
estimatorthat uses allmoment
conditions involving?/,oremains
biased even as
T
—
> 00.7
Long
Difference
Specification:
Infinite
Iteration
We
found
that the iteration ofthe long difference estimatorworks
quite well. In the {i+
l)-thiteration, our iterated estimator estimates the
model
ViT
-
yn
=
PiViT-i-
Uio)+
£iT-
ea
based on
2SLS
using instruments Zi {^(^e))—
{yi0,yi2-
P{e)yn,--- ,yiT-i-%)?/ir-2J, where
P,(\ is the estimator obtained in the previous iteration.
We
might want
toexamine
properties ofan
estimatorbased on an
infinite iteration,and
see if it improves the bias property. Ifwe
continue the iteration
and
it converges^\
the estimator is a fixed point to the minimizationproblem
where
^i{b)=
Zi(b) {{yiT—
yii)—
b{yir-i —yio))- Call theminimizer
the infinitely iterated2SLS
and
denoteit I3j2Sls-Another
estimatorwhich
resemblesPj2sls
i^CUE,
which
solves(N
\'
/ '^\~^
/
^
{b)
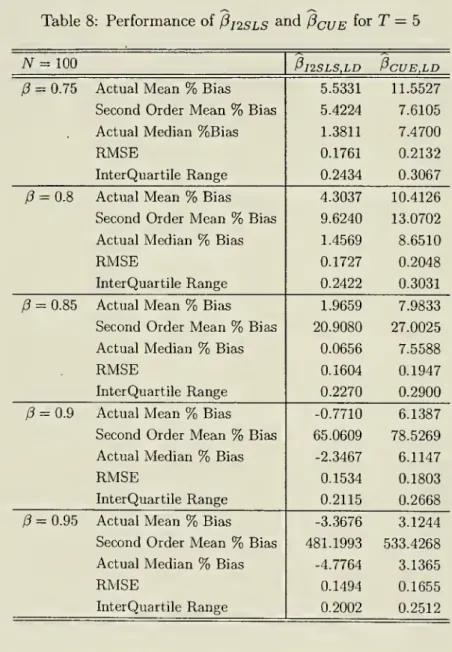
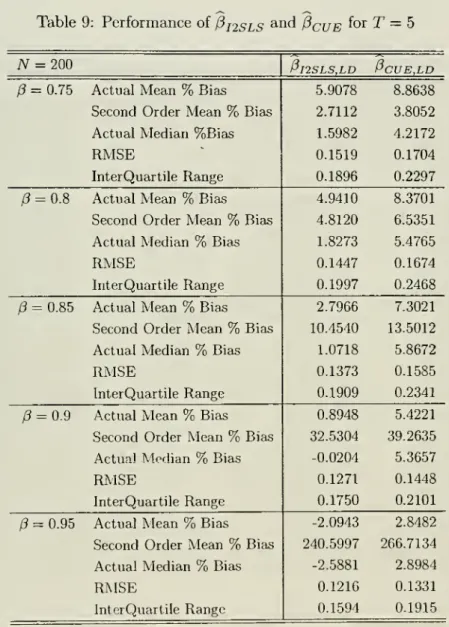
Their actual
performance
approximated
by 5000
Monte
Carlo runs along with the biasespre-dicted
by
second order theory inTheorem
4 aresummarized
in Tables 8and
9.We
find thatthe long difference
based
estimatorshave
quite reasonable finitesample
properties evenwhen
/?is close to 1. Similar tothefiniteiteration in the previoussection, thesecond order theory
seem
to
be
next to irrelevant for /3close to 1.We
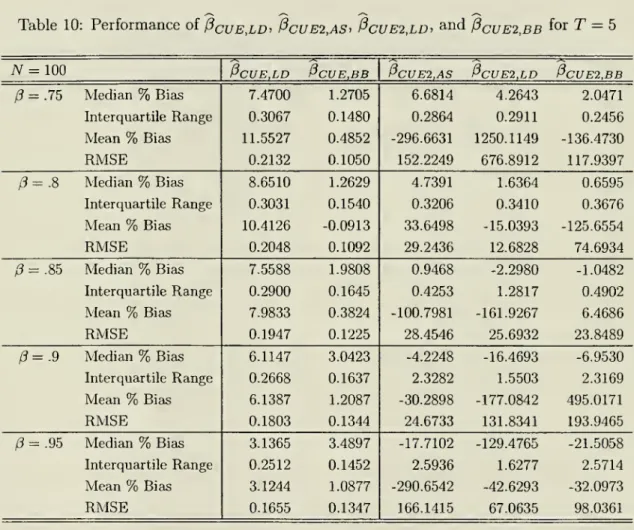
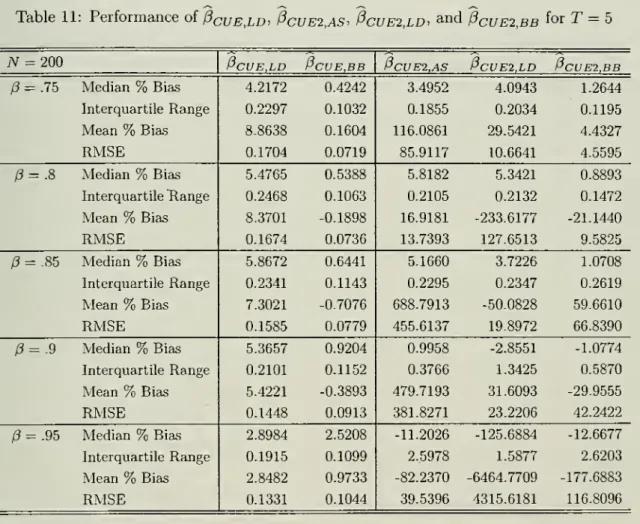
compared
performances
ofour estimatorswith
Ahn
and
Schmidt's (1995) estimator aswell as Blundell
and Bond's
(1998) estimator.Both
estimators are defined in two-stepGMM
procedures. In order to
make
a accuratecomparison with
our longdifference strategy, forwhich
thereis
no
ambiguity
ofweight matrix,we
decided toapply the continuousupdating
estimatortotheir
moment
restrictions.We
had
difficulty of finding globalminimum
forAhn
and
Schmidt's(1995)
moment
restrictions.We
therefore used aRothenberg
typetwo
step iteration,which
would have
thesame
second order propertyastheCUE
itself. (SeeAppendix
I.) Again, in orderto
make
a accurate comparison,we
applied thetwo
step iteration idea toour long difi"erenceand
Blundelland
Bond
(1998) aswell.We
call theseestimatorsPcue2
aSjPcuE2
ld^^^^
0cuE2
BB-We
setn
=
100and
T
=
5.Again
thenumber
ofmonte
carlo runswas
set equal to 5000.Our
results are reported in Tables 10
and
11.We
can
see that the long difference estimator has acomparable
property toAhn
and
Schmidt's estimator.We
do
notknow
why
Pcue2LD
^^^ suchalarge
median
bias at /3=
.95whereas
P^y^
iq
does not have such problem."Thereisnoapriori reasonto believe that the iterationsconverge tothefixed point. To show that,onewould
8
Conclusion
We
have
investigatedthebias ofthedynamic
panel effects estimators usingsecond
orderapprox-imations
and
Monte
Carlo simulations.The
second
orderapproximations
confirm the presenceofsignificant bias as the
parameter
becomes
large, ashas previouslybeen found
inMonte
Carloinvestigations.
Use
ofthesecond order asymptotics todefine asecond order unbiased estimatorusing the
Nagar
approach
improve
matters,but
unfortunately does notsolvetheproblem.Thus,
we
propose
and
investigate anew
estimator, thelongdifferenceestimatorofGriUchesand
Haus-man
(1986).We
find inMonte
Carloexperiments
that thisestimatorworks
quitewell,removing
most
ofthe biaseven
for quite high values ofthe parameter. Indeed, the long differencesesti-mator
does considerably betterthan
"standard" second order asymptoticswould
predict.Thus,
we
consider alternative asymptoticswith a
near unit circle approximation.These
asymptoticsindicate that the previously
proposed
estimators for thedynamic
fixed effectsproblem
sufferfrom
larger biases.The
calculations alsodemonstrate
that the longdifference estimator shouldwork
in eliminating the finitesample
bias previously foimd.Thus,
the alternative asymptotics explain ourMonte
Carlo finding ofthe excellentperformance
ofthe long differences estimator.Technical
Appendix
A
Technical
Details
for
Section
3
Lemma
3E
E{<^'-:-^/.'«":)
Proof.
We
haveE
xl'Ptel- ^xl'Mte:
E{tTa.ce{PtEt[e:x;'])]Kt
0.
-E
[trace{MtEtlelx*/])],n-Kt
whereEt[] denotesthe conditionalexpectation givenZt- Because Et[el]
=
0, Et[e^xl']istheconditionalcovariancebetweene^ andyl'-i,whichdoes not depend onZtdueto jointnormality. Moreover, by
cross-sectional independence,
we
haveEt [e;xr]
=
Et [eltxlt] /„.Hence, using the fact that trace (Pj)
=
Kt
and trace(Mj)=
n
—
Kt,we
havexl'Pte;
-
—x'Mtc
n
Et[eltxU
{Kt
-^^^
[n-
Kt)^
=
0,from which theconclusion follows.
Lemma
4Var{xl'Mte;)
=
{n-
t)a^E
[v*^]+
[n-
t){E
[<,e*J)',
Cov
[xl'h'Itel,x'/Msel)=
{n-
s)E
[vie*,]E
[<,£*,],
s<t
wherev*,
=
x*,-
E[x\,\zn].Proof. Follows by modifying the developments from (A23) to (A30) and from (A31) to A(34) in
Alvarez and Arellano (1998).
Lemma
5 Suppose that s<
t.We
haveE
\v^]=
T
-t
/ 10-0
T-t+l ^2T-t
1 "T-t
+
l(T-tf{l-pf
X\{T-t)
+
r-1
E[vy*,]=
-o^+
fT^ /T
-0"-)\JT-
i+
1 (T -i t){\ 1~0)
T~tT-i
+
l{T-tf{l-0)
[T-t]
0-0
1-E[vle*^]
=
-a
+
a'.^/
'
-s
i}-P^-
J 'Vr-
-s+
1 (T --s -5)(1 1-P)
\It-s
+ \{T-i
)(r-1 t){\--P)
1 T--tE
Kel]
^
Y
T
-
f+
1(T
-
5)(r-
t) (1-
/?)(T-t)
T-t
\-p
T-t1-/?
;'
1-/3
Proof.
We
first characterize v*j.We
haveXi,t
=
J/i.t-iXi,t+i
=
Vi.t=
Qi+
Pyi,t-\+
£i,ti,r
=
yi,r-i=
—
i^-Qi
+
P'^ *yi,t-i+
ffi,T-i+
Pei,T-2+
+
P"^ ' ^e^.t)1
—
p
\ / and henceT-f
+
l , 1 ,P-P
T-f+l yi,t-i /?-/?T-t+l ^(T-i)(l-/3)y^"'-^
\l-/3
(r-i)(l-/3)V
(1
-
P)£i,T-i+
(1-
/3^)ei,T-2+
+
(l-
Z?"^-*)ei,t(T-i)(l-/?)
It followsthat
1 /?-/?T-t+l
T-t
from which
we
obtainT-t
{T-t){l-p)
J
''•'-'yi-P
(T-t)
(1-/3)2^ E[ai\zit], 1 (ai -£'[Qi|2,i])T-t
+
lyi-p
{T-t){l-pf
JT-t
(1-
/3)^..T-i+
(1-
/?')£i,r-2+
•••+(!-
P'^-'){T-t){\-P)
T-t
+
l (20)We
now
compute
E
(Qj-
E\ai\zit\y Var[q;!Zit]. It canbeshown
that2 2
Cov(Q„(y,o,-..,y.(-i)')
=
Y^^>
and Var ((y,o, - ,2/zt-i)')=
—
^^^^'
+
Q
where £ is a i-dimensioanl column vector of ones, and