HAL Id: tel-02603669
https://hal.inrae.fr/tel-02603669
Submitted on 16 May 2020HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
M. Bouvier
To cite this version:
M. Bouvier. Caractérisation des structures forestières par lidar aéroporté pour l’évaluation de la ressource et le suivi de la biodiversité floristique. Sciences de l’environnement. Thèse de doctorat Ecosystèmes et sciences agronomiques, AgroParisTech, 2016. Français. �tel-02603669�
Thèse préparée à l'UMR TETIS et au CARTEL
Thèse
Pour obtenir le grade de docteur délivré par
L'Institut des Sciences et Industries du Vivant et de l'Environnement
(AgroParisTech)
Spécialité : Ecosystèmes et sciences agronomiques
Caractérisation des structures forestières par lidar
aéroporté pour l’évaluation de la ressource et le
suivi de la biodiversité floristique
Présentée et soutenue publiquement par
Marc Bouvier
Le 26 juin 2015
Jury:
Jérôme Chave, Examinateur, Directeur de Recherche CNRS Pierre Couteron, Examinateur, Directeur de Recherche, IRD
Sylvie Durrieu, Co-directrice de thèse, ICPEF, Irstea
Richard Fournier, Co-directeur de thèse, Professeur, Université de Sherbrooke Philippe Lejeune, Rapporteur, Professeur, Université de Liège
Remerciements
Je tiens tout d’abord à remercier mes deux directeurs de thèse Sylvie Durrieu et Richard Fournier. Conscient de la chance que j’ai eu d'avoir bénéficié d'un aussi bon encadrement, je remercie Sylvie pour avoir suivi au quotidien cette thèse, pour sa patience et sa disponibilité. Je remercie également Richard pour la complémentarité et la qualité de son encadrement, ainsi que son accueil à Sherbrooke. Leurs qualités humaines et scientifiques resteront pour moi un exemple.
Je remercie les membres du jury d’avoir bien voulu porter intérêt à ce travail, le Dr. Pierre Couteron pour m’avoir fait l’honneur de présider le jury, le Dr. Philippe Lejeune et le Dr. Kamel Soudani pour avoir accepté d’être les rapporteurs de cette thèse. Je remercie également le Dr. Jérôme Chave, examinateur de ce travail.
Un grand merci pour les remarques et les conseils lors des comités de thèse à: Thierry Bélouard, Flavie Cernesson, Sébastien Conil, Frédéric Gosselin, Anne Jolly, Jean-Pierre Renaud, Nathalie Saint-Geours, Osvaldo Valeria et Pierre-Yves Vion.
Je remercie toutes les personnes qui m’ont aidé dans mon travail. Je remercie Danny de m'avoir transmis sa passion du lidar, Jean-Pierre et Cédric de m’avoir fait profiter de leur expérience. Je remercie Mohammad et Laurent pour leur aide en tant que géomètre lors des missions de terrain dans les Landes ou à Bure. Merci aussi à Audrey et Morgane pour m'avoir sauvé la vie avec Qgis. Merci à Rémi pour ses talents d'informaticiens. Je remercie aussi Eloi et Henri pour leur aide en programmation. Je tiens aussi à remercier Marion, Frédéric et leurs enfants pour leur accueil à Nogent sur Vernisson. Enfin, un grand merci à pH pour son co-encadrement de l'ombre.
Je remercie tout le personnel de la Maison de la télédétection, toutes les personnes avec qui j’ai eu la chance partager mes repas, mes pauses et toutes les personnes que je n'ai pas citées ici et qui se reconnaîtront dans ces quelques lignes. Je tiens à remercier en particulier Iza et tous mes voisins de bureau avec qui j'ai souvent partagé de bons moments: Hani, Tristan, Guilhem, Thomas, Mohammad Merheb, Mohammad El-Hajj, Henri, Danny et Pierre.
Je ne saurais oublier mes parents et ma sœur qui m’ont accompagné tout au long de cette période. Enfin, une pensée particulière pour Morgane pour sa présence et son soutien au quotidien.
Table des matières
Remerciements _____________________________________________________________ v Table des matières __________________________________________________________ 1 Acronymes _________________________________________________________________ 3 Introduction _______________________________________________________________ 5 Chapitre I - Évaluation de la ressource forestière _________________________________ 15
1 Présentation de l’article _________________________________________________ 15 2 Generalizing predictive models of forest inventory attributes using an area-based approach with airborne lidar data _____________________________________________ 20
Chapitre II - Analyse de sensibilité des modèles de ressource forestière _______________ 49
1 Présentation de l’article _________________________________________________ 50 2 Influence of sampling design parameters on biomass predictions from airborne lidar data _____________________________________________________________________ 54
Chapitre III - Évaluation de la biodiversité floristique ______________________________ 83
1 Présentation de l’article _________________________________________________ 84 2 Use of lidar to improve floristic biodiversity monitoring in forest ecosystems _______ 88
Conclusion générale _______________________________________________________ 113 Communications scientifique ________________________________________________ 121 Liste des tableaux _________________________________________________________ 123 Liste des figures __________________________________________________________ 125 Bibliographie _____________________________________________________________ 129 Annexes _________________________________________________________________ 147 Résumé _________________________________________________________________ 160 Abstract _________________________________________________________________ 160
Acronymes
AGB AboveGround Biomass – Biomasse aérienne ALS Airborne Laser Scanning – Lidar aéroporté ABA Area-Based Approach – Approche à la placette
DBH Diameter at Breast Height – Diamètre à hauteur de poitrine DEM Digital Elevation Model – Modèle numérique de hauteur DGPS Differential Global Positioning System – GPS différentiel DSM Digital Surface Model – Modèle numérique de surface DTM Digital Terrain Model – Modèle numérique de terrain BA Basal Area – Surface terrière
GPS Global Positioning System – Système de localisation mondial GSA Global Sensitivity Analysis – Analyse de sensibilité globale Lidar LIght Detection And Ranging
MLS Mobile Lidar System – Système lidar mobile
MPE Mean Percentage Error– Pourcentage d'erreur moyenne OAT One factor At a Time
TLS Terrestrial Laser Scanning – Lidar terrestre Radar RAdio Detection And Ranging
RMSE Root Mean Square Error – Erreur quadratique moyenne RSD Relative standard deviation – Ecart-type relatif
Introduction
Les écosystèmes forestiers sont composés d’un ensemble de végétaux, d’animaux et de micro-organismes qui s’y développent. Bien qu'en majorité ne vivant plus directement dans les forêts, les Hommes restent liés à ces écosystèmes, et ils les influencent de façon croissante depuis l’« Anthropocène » (Lugo, 2014). Notre perception et nos attentes vis-à-vis de ces écosystèmes ont basculé au cours des dernières décennies, et la prise de conscience de leur fragilité a fait émerger de nouveaux concepts, dont celui d'Anthropocène. Cette nouvelle ère géologique propose de prendre en compte l'impact croissant de l'Homme depuis la révolution industrielle et l’assimile à une véritable force géologique influençant à la fois la géosphère et la biosphère. Le début de cette ère avait été symboliquement fixé en 1784, année de l'invention de la machine à vapeur (Crutzen and Stoermer, 2000). Une étude récente propose plutôt d’en fixer le début en 1610, correspondant à l'année où la teneur en CO2 dans l'atmosphère la plus basse a été
enregistrée au forage de Law Dome en Antarctique (Lewis and Maslin, 2015). En effet, l'influence de l'Homme sur la planète a perturbé durablement le cycle du carbone. L'augmentation du CO2 dans l'atmosphère favorisant l'effet de serre et le dérèglement
climatique, minimiser ses sources et maximiser ses puits est devenu un enjeu central. Les forêts étant le premier puits continental de carbone, leur rôle est primordial. Il ne s'agit plus seulement de bien gérer les ressources locales de bois, pour s'approvisionner en bois d'œuvre, bois d'industrie, ou en bois de chauffage.
Nous avons maintenant une conscience claire de l'interdépendance des écosystèmes forestiers à travers le monde et de la nécessité de préserver nos forêts et leurs multiples fonctions pour les générations futures, remettant ainsi en cause les schémas productivistes. Aujourd’hui, les forêts sont de plus en plus protégées. Il est indispensable de mettre en place des stratégies de gestion durable, et transposables entre les pays, afin de maintenir la capacité de ces écosystèmes à assurer leurs différentes fonctions. Ces fonctions sont diverses et souvent combinées. Dans cette thèse la caractérisation des structures forestières pour l'évaluation de la séquestration du carbone à travers le calcul de la biomasse restera une motivation constante, néanmoins la description de ces structures permettra également une étude plus fine de la ressource en bois et même une lecture améliorée de la biodiversité floristique.
La séquestration du carbone est essentielle dans la régulation du cycle du carbone. Les végétaux absorbent par photosynthèse le gaz carbonique de l'atmosphère, stockant une partie du carbone prélevé sous forme de biomasse et rejetant de l'oxygène dans l'atmosphère. Les bases de ce cycle sont connues depuis la fin du XVIIIème siècle à partir des découvertes de Joseph Priestley (Johnson, 2008). Le carbone stocké dans la biomasse forestière diminue d’environ 0.5 Gt chaque année (FAO, 2010). La déforestation massive et les changements dans l’utilisation des sols sont responsables de l’amenuisement de la superficie forestière mondiale. Et cela, malgré la mise en place de programmes de réduction des émissions de gaz à effet de serre dues à la déforestation et à la dégradation de ces écosystèmes (REDD) visant à compenser financièrement la non-déforestation. Le groupe d’experts intergouvernemental sur l’évolution du climat (GIEC) envisage des scénarios optimistes de séquestration accrue du carbone sous l’effet conjugué du ralentissement de la déforestation et de politiques de plantations sur des terres non forestières (Seeberg-Elverfeldt, 2010). Mais en regard de la problématique climatique l'Organisation des Nations Unies pour l'alimentation et l'agriculture (FAO) fait également état de besoins croissants en terres agricoles à l’horizon 2030-2050 (OECD, 2014). Les problématiques alimentaires primeront sûrement, toutefois les projets de séquestration de carbone par les écosystèmes forestiers ne doivent pas pour autant être définitivement condamnés. Plusieurs initiatives, notamment en Afrique et en Amérique latine ont pour objectif, entre autres, de renforcer les puits forestiers de carbone (Boulier and Simon, 2010). Le succès de ces projets repose sur une approche multifonctionnelle de la forêt visant à maintenir la biodiversité et à valoriser la ressource bois-énergie. Dans ces approches, le développement de la production de bois-énergie est orienté vers des boucles courtes afin de favoriser aussi le développement économique local.
La production de bois-énergie est en effet aussi une fonction importante des forêts. Cette fonction est fondamentale dans l’histoire de l’Homme depuis la maîtrise du feu, il y a près de 800,000 ans (Alperson-Afil and Goren-Inbar, 2010). Le bois peut être considéré comme une énergie renouvelable si l'exploitation des forêts conduit à une quantité de bois créée au moins équivalente à celle consommée. Néanmoins, les combustibles bois demandent aussi une part d’énergie non-renouvelable pour leur production et leur transport, et ils participent fatalement à court terme à l'augmentation locale des pollutions atmosphériques. En France, la gestion de cette énergie renouvelable - mais pas complètement « propre » - est le sujet d'un riche débat de société, comme en atteste par exemple la différence d'opinion entre certaines décisions locales d'interdiction de cette source d'énergie, comme dans la région parisienne, et les déclarations contradictoires du ministère de l'écologie (Le Monde, 2014). Ainsi, le bois se présente comme un élément
clef face aux problématiques climatiques, de décentralisation, et de diversification des énergies (IPCC, 2011). Le bois concourt déjà largement à l’approvisionnement mondial en énergie primaire à hauteur de 9% (FAO, 2011). Il faudrait encore augmenter la production de bois-énergie pour contribuer significativement à la transition énergétique. En France, la ressource en bois-énergie disponible est croissante mais son potentiel reste encore largement sous-exploité (ALCIMED-PIPAME, 2012). A l'échelle mondiale, cette production reste limitée par la disponibilité des sols, les ressources en eau et par la concurrence des autres fonctions des écosystèmes forestiers. Une utilisation efficiente de nos forêts est donc essentielle. Elle devra passer par une meilleure évaluation de la ressource et une optimisation des pratiques et techniques de gestion forestière afin de limiter l’impact de l’exploitation forestière sur les autres fonctions de ces écosystèmes, et notamment sur la biodiversité.
Les écosystèmes forestiers concentrent plus de 80% de la biodiversité continentale (FAO, 2011). Mais la biodiversité subit de fortes pressions et le taux d'extinction global des espèces est considéré comme cent à mille fois plus important que le taux moyen d'extinction depuis l'apparition de la vie sur Terre (Lawton and May, 1995). Le maintien de la diversité naturelle des organismes vivants est donc une fonction indispensable des forêts. Les changements climatiques actuels, l’intensification des pratiques agricoles et forestières et le morcellement des territoires sont les causes principales de perte de biodiversité. De nombreux programmes de recherche sont menés sur la biodiversité forestière afin d'améliorer notre connaissance sur la diversité du vivant, les habitats forestiers et leurs interactions. Les premières études ont souvent conduit à des discours alarmistes avec une opposition manichéenne entre Nature et Société (Rossi and Bertrand, 2000). Pourtant, les perturbations sont nécessaires au maintien de l’hétérogénéité et de la diversité dans les écosystèmes forestiers (Simon, 2006). L'exploitation forestière n'est donc pas incompatible avec la protection de la biodiversité tant que les écosystèmes forestiers ne sont ni monospécifiques, ni monofonctionnels (Battles et al., 2001). La valorisation économique des services rendus par la biodiversité forestière est aussi un concept qui se développe afin d'allier protection et rémunération. Quelle que soit la stratégie adoptée, les actions de protection de la biodiversité doivent être menées dans le cadre d'une approche multifonctionnelle, intégrant les besoins des populations locales, et doivent être adaptées aux caractéristiques propres à chacune des forêts.
Les forêts s’étendent des déserts glacés aux déserts secs et sont de ce fait adaptées à une grande variété de biotopes. Elles revêtent ainsi une infinité de formes caractérisées par une multitude de structures. La structure forestière correspond à l’organisation verticale et
horizontale des différents éléments constituant un peuplement (Pommerening, 2002). La structure verticale comprend plusieurs étages: les strates muscinales, herbacées, arbustives et arborescentes. Quant à la structure horizontale, elle prend en compte l'hétérogénéité du couvert forestier et l'existence de trouées. Les écosystèmes forestiers regroupent une grande diversité d’habitats, évoluant dans le temps au gré des perturbations et selon des structures récurrentes (cycle sylvigénétique). Ainsi, la structure spatio-temporelle de la végétation joue un rôle fondamental dans le fonctionnement des écosystèmes forestiers. La connaissance et la description fidèle de ces structures sont indispensables pour caractériser ces milieux en termes de ressource et d'habitats. Des inventaires traditionnels sont couramment utilisés pour acquérir un nombre limité d'informations relatives à la structure des peuplements d’une placette forestière. Ces relevés dendrométriques s'effectuent à pied et comprennent généralement l'espèce et le diamètre de chacun des arbres inventoriés, ainsi que la localisation de la placette (Rondeux, 1993). Généralement et pour des raisons pratiques évidentes, seuls les arbres au-dessus du diamètre pré-comptable (diamètre seuil) sont inventoriés dans un rayon fixé pour tenir compte de la diversité intra-peuplement. D'autres paramètres peuvent aussi compléter ces relevés, comme la hauteur et la position des arbres, le type de sol, ainsi que des relevés floristiques et faunistiques. Ces données sont utilisées pour évaluer de nombreux attributs forestiers, dont certains sont estimés indirectement à l'aide de relations statistiques. Ces relations, dites allométriques, reposent sur une analyse dimensionnelle pour estimer une mensuration (e.g. biomasse) en fonction d'une autre (e.g. diamètre) (Picard et al., 2012). Typiquement, la biomasse dépend du volume et de la densité du bois de l'arbre, qui varie d'une essence à l'autre, et ce volume pourra être relié au diamètre de la tige. Les attributs forestiers, évalués dans chacune des placettes, sont ensuite extrapolés à l'échelle du massif forestier. Les inventaires forestiers traditionnels fournissent des données de référence essentielles pour caractériser précisément la structure des peuplements à l'aide de certains attributs choisis. Cependant, ils se révèlent laborieux et coûteux, particulièrement dans les zones difficiles d’accès. De plus, ils sont évidemment difficiles à réaliser de façon précise sur de grandes étendues.
Les techniques de télédétection actuelles, utilisées pour l’observation de la biosphère, peuvent améliorer ces inventaires forestiers. L’idée de caractériser les peuplements forestiers à l’aide des outils de télédétection n’est pas récente. Dès 1939, le professeur Hugershoff décrivait l’utilisation de son Autocartographe pour l’étude des peuplements forestiers à partir d’images aériennes (Hugershoff, 1939). Depuis, les techniques ont beaucoup évoluées et la télédétection permet maintenant de caractériser plus finement les milieux forestiers. Il existe deux grandes familles de capteurs de télédétection : les capteurs passifs recevant l’énergie sans en émettre eux-mêmes, comme par exemple les appareils
photographiques, et les capteurs actifs enregistrant la quantité d’énergie qu’ils ont eux-mêmes émise et qui a été rétrodiffusée. Bien qu’adaptés à la production d’un certain nombre de paramètres forestiers (Wulder, 1998), les données acquises par des capteurs passifs (souvent dans des longueurs d’ondes du domaine de l’optique) ne permettent pas d’avoir une information tridimensionnelle complète nécessaire pour décrire les structures forestières (Hall et al., 2005). En effet, ces capteurs renseignent sur la structure horizontale, mais pas directement sur la structure verticale de la végétation (Lim et al., 2003a). Pour combler cette lacune, certains capteurs actifs peuvent fournir des informations sur la structure verticale des peuplements grâce à leur capacité de pénétration à l’intérieur du couvert forestier. Le radar est l'archétype du capteur actif, dont la longueur d'onde est l'attribut essentiel, puisqu'elle conditionne le pouvoir de pénétration (Leckie and Ranson, 1998). La longueur d'onde fixe la limite de diffraction, c'est à dire la taille minimale des détails qui peuvent être observés et la taille limite des interstices pouvant être pénétrés. Les radars émettent et reçoivent des ondes radio, dont la longueur d'onde typique ne descend pas en dessous du millimètre. Les radars sont utilisés pour caractériser la végétation, et ce quelles que soient les conditions d’ensoleillement et météorologiques. Dans les forêts très denses, l'encombrement des branches et feuilles est alors trop important et la capacité de pénétration est fortement réduite, rendant impossible l’estimation des attributs associés à la structure verticale par l’analyse du coefficient de rétrodiffusion (Cohen and Spies, 1992). Afin de pallier cette limitation, le lidar apparaît comme une solution prometteuse, puisqu'il étend le principe du radar à des longueurs d'ondes plus petites, dans le domaine visible, le proche infrarouge et l'ultraviolet. Pour l'étude des forêts, la longueur d'onde du laser est idéalement fixée entre 900 et 1064 nanomètres, où la réflectance de la végétation est maximale. Alors que dans le visible l'absorption trop élevée de la végétation limitera l'énergie retournée au capteur. En somme, le lidar combine le principe de rétrodiffusion du radar avec l'émission laser d'une onde lumineuse cohérente. Selon la densité du couvert, les impulsions laser sont en mesure de pénétrer à travers les interstices du feuillage, de renseigner sur les objets rencontrés, et finalement d’atteindre le sol (Figure 0.1). De ce fait, les données tridimensionnelles enregistrées sont dépendantes de la nature et des propriétés du couvert forestier, et renseignent simultanément sur la structure en place, ainsi que sur la topographie du terrain. Cette complémentarité d’information offre la possibilité de déterminer rapidement de nombreuses caractéristiques forestières (Nelson et al., 1988; Næsset, 2004a), sur de grands territoires (Figure 0.2). L’utilisation du lidar en appui aux inventaires forestiers traditionnels est désormais opérationnelle (Tickle et al., 2001; Lim et al., 2003a).
Figure 0.1. Schéma du fonctionnement d’un lidar aéroporté illustrant son interaction avec la végétation. A gauche, un lidar embarqué sur un avion émet un pulse en direction du sol. A droite, l’énergie rétrodiffusée par la végétation et le sol permet de caractériser la structure de la végétation.
Figure 0.2. Carte des hauteurs d’arbres réalisée à partir de données ICESat (lidar). Crédit: Lefsky (2010).
Plusieurs types de lidars sont utilisés pour répondre aux besoins des diverses applications forestières et décrire la structure des peuplements sur différentes échelles et avec différentes résolutions (Figure 0.3). Les lidars fonctionnant en retours discrets enregistrent pour chaque impulsion émise un ou plusieurs retours (échos) correspondant à certaines cibles interceptées par l’impulsion laser émise. Un système de positionnement précis du lidar (par exemple GPS différentiel) combiné avec une centrale inertielle donnant l’orientation du système lidar permet ensuite de connaître la position exacte de chaque cible. Les lidars peuvent également fonctionner en retour d’onde complète (en anglais full
waveform), ils enregistrent alors pour chaque impulsion émise la quantité d’énergie
rétrodiffusée vers le capteur avec une très haute fréquence (typiquement une mesure d’intensité toute les nanosecondes). Ces lidars permettent également d’extraire la structure de la végétation traversée par le faisceau laser. Un dernier type de récepteur lidar fonctionne par comptage des photons qui ont été rétrodiffusés et ensuite récoltés par des détecteurs optiques très sensibles. Les systèmes lidar se distinguent aussi par les spécifications de leur système d’émission. Les systèmes lidar à émission continue mesurent la distance par différence de phase entre le signal émis et réfléchi alors que les systèmes à impulsion utilisent le temps de parcours entre l'émetteur-récepteur et la cible. La puissance du laser est aussi un paramètre clé qui détermine la distance maximale entre le capteur et les cibles. Cette distance associée à l’angle de divergence du faisceau laser conditionne la taille de l’empreinte sur la cible. Au-delà de ces spécifications ayant trait aux systèmes d'émission et de réception, il est utile de distinguer différents lidars par leur mode d'implémentation. Le lidar terrestre (TLS) permet de décrire les structures des arbres à l’échelle de la placette forestière. Le TLS, souvent à retour discret, est généralement fixé sur un trépied et associé à un système de balayage hémisphérique. Ainsi, des millions de points sont enregistrés avec une précision millimétrique permettant de décrire très finement les structures des arbres (Figure 0.3). À une échelle plus grossière, celle du massif forestier et au-delà, des lidars aériens (ALS) sont utilisés. Ces lidars sont aussi associés à des systèmes de balayage et ils sont embarqués sur des drones, des ULM, des avions, ou encore des hélicoptères. L’ALS peut fonctionner à retour d’onde complète ou plus souvent à retour discret. Enfin, embarqué sur un satellite, le lidar permet de décrire les peuplements à l’échelle mondiale. Un planisphère des hauteurs d’arbres produit avec des données du lidar GLAS (Geoscience Laser Altimeter System) embarqué sur le satellite ICESat (Ice, Cloud, and land Elevation Satellite) est reproduit sur la Figure 0.2. Cette carte illustre le compromis entre l'échelle d'application du lidar et sa précision. Dans le cas du satellite ICESat, la forme d’onde correspondant à une empreinte de 70 m de diamètre permet d’estimer la hauteur du couvert forestier avec une forte incertitude. Nous voulons
maintenant aller plus loin. Cette thèse s'inscrit dans un effort collectif dont le but est d'approfondir et de raffiner l'usage du lidar dans la caractérisation des écosystèmes forestiers afin de répondre aux principaux enjeux actuels autour de la forêt. Au cours de cette thèse j'ai eu l'opportunité de travailler avec des données issues de lidars aéroportés, mais aussi avec des lidars terrestres afin de combiner leur utilité aux mesures de terrain traditionnelles auxquelles j'ai directement participé.
Figure 0.3. Exemple d’une placette de la forêt landaise vue par trois systèmes lidars différents. A gauche, un lidar terrestre avec une très grande densité de points de 4 points/cm2 à 100 m (soit environ 70 000 000 points pour une placette de 15 m de rayon). Au centre, un lidar aéroporté avec 10 points/m2 (soit près de 7 000 points pour une placette de 15 m de rayon). A droite, un profil de végétation du lidar satellitaire ICESat (avec une empreinte au sol de 35 m de rayon).
Une meilleure description des structures forestières est essentielle pour orienter les décisions politiques et économiques. Mieux caractériser ces structures permettra de mieux orienter la gestion forestière, que ce soit vis-à-vis des problématiques de séquestration du carbone pour la régulation du changement climatique, de ressource, ou de biodiversité. Quel que soit le type de peuplement, les attentes en terme de précision sur l’estimation de cette ressource par télédétection sont de 20% (maximum d’erreur sur la biomasse; Hall et al., 2011; Zolkos et al., 2013). La grande majorité des études portant sur l’estimation de la ressource par lidar se sont concentrées sur des peuplements de structure simple (Lu, 2006).
Et la plupart des résultats obtenus sur des peuplements mixtes (feuillus et résineux) ou sur des peuplements feuillus de structure complexe sont moins prometteurs (Zolkos et al., 2013). Pourtant, les peuplements susceptibles d’être valorisés par la production de bois-énergie peuvent présenter des structures complexes. De plus, le développement de la filière bois-énergie pourrait entraîner des modifications dans les pratiques d’aménagement des forêts, la composition des essences, ainsi que dans la structure des peuplements. Quel en serait l’impact sur la biodiversité? Pour y répondre, une meilleure caractérisation des forêts est nécessaire. Le lidar a déjà été utilisé pour décrire certains habitats forestiers (e.g. Vierling et al., 2008). Il est aussi susceptible d’informer sur l'organisation des différentes strates de la végétation, qui aura des répercussions sur la qualité de ces habitats puisque le nombre de strates d'un peuplement peut être relié à sa capacité d'accueil pour de nombreuses espèces animales et végétales (MacArthur and MacArthur, 1961).
Les enjeux associés à l'utilisation d'un lidar pour la caractérisation des structures forestières sont ainsi très différents. Les premiers sont opérationnels et des modèles existent déjà pour évaluer la ressource forestière à partir de données lidar. Mais ces modèles doivent être améliorés en termes de précision et de robustesse. L'identification de nouvelles variables lidar devrait permettre de caractériser les différents aspects de la structure et améliorer les modèles existants. Il est aussi nécessaire de mieux connaître les différentes sources d'erreur qui affectent ces modèles et leurs prédictions. Les seconds enjeux sont plus exploratoires. Ces dernières années, plusieurs études ont montré le lien entre des indicateurs de biodiversité faunistique et la structure forestière caractérisée par des données lidar (Lesak et al., 2011; Zellweger et al., 2013; Müller et al., 2014). Mais les recherches portant sur l’utilisation du lidar pour l'étude de la biodiversité floristique sont moins abondantes (Simonson et al., 2012; Lopatin et al., 2014). Comprendre les relations entre ce type de biodiversité et la structure forestière pourrait permettre à terme de favoriser la biodiversité forestière par des pratiques de gestion adaptées.
Suivant ces problématiques, le manuscrit est divisé en trois chapitres. Le premier chapitre traite du développement de nouveaux modèles pour l'évaluation de la ressource forestière. Plusieurs attributs forestiers ont été évalués sur trois massifs forestiers représentatifs de la diversité des forêts françaises. Le second chapitre porte sur l'évaluation et la comparaison des différentes sources d'erreur qui affectent ces modèles. L'objectif de ce chapitre est de fournir des recommandations pour optimiser les coûts associés à l'évaluation de la ressource par lidar et minimiser les incertitudes liées au développement de ces modèles. Enfin, le troisième chapitre explore l'apport du lidar pour l'étude de la biodiversité floristique et le développement de modèles reliant différents indicateurs de la
biodiversité floristique à plusieurs variables environnementales, incluant des variables dérivées des données lidar. Ce manuscrit s’articule autour de trois articles, chaque article constituant le cœur d’un chapitre. Les trois articles sont écrits en anglais. En date du dépôt de la thèse, un article est publié (Chapitre I), et les deux autres ont été soumis au processus de révision par les pairs (Chapitre II et III). Des références ponctuelles à certains articles supplémentaires auxquels j'ai participé apparaîtront également au fil du texte.
Chapitre I - Évaluation de la ressource forestière
1 Présentation de l’article _________________________________________________ 15
1.1 Contexte de l’étude: méthodes d’évaluation de la ressource et limitations actuelles __15
1.2 Sites d’études ___________________________________________________________18
1.3 Avancées et perspectives __________________________________________________18
2 Generalizing predictive models of forest inventory attributes using an area-based approach with airborne lidar data _____________________________________________ 20
2.1 Abstract ________________________________________________________________20
2.2 Introduction _____________________________________________________________21
2.3 Materials _______________________________________________________________24
2.3.1 Study sites ____________________________________________________________________ 24
2.3.2 Field plot data _________________________________________________________________ 25
2.3.3 Lidar data _____________________________________________________________________ 27
2.4 Methods ________________________________________________________________28
2.4.1 Selection of lidar metrics ________________________________________________________ 29
2.4.2 Establishment of the model ______________________________________________________ 33
2.4.3 Model validation _______________________________________________________________ 34
2.4.4 Analysis of the generalization capacity of the model __________________________________ 35
2.5 Results _________________________________________________________________36
2.5.1 Validation of model shape through the global evaluation of model generalization level ______ 36
2.5.2 Impact of stand complexity on model quality ________________________________________ 38
2.5.3 Effects of leaf-on versus leaf-off conditions on model quality ___________________________ 41
2.6 Discussion ______________________________________________________________41
2.7 Conclusion ______________________________________________________________46
2.8 Acknowledgements _______________________________________________________46
1 Présentation de l’article
1.1 Contexte de l’étude: méthodes d’évaluation de la ressource et limitations
actuelles
Deux types d’approches sont utilisées pour évaluer quantitativement la ressource forestière à partir de données d’un lidar aéroporté : celle dite à l’arbre et celle dite à la
placette. Ces approches permettent de mettre en relation des variables de structures mesurées par lidar avec différents attributs forestiers. Ces derniers peuvent être directement mesurés lors d'inventaire de terrain (e.g. surface terrière, hauteur) ou bien estimés à l'aide d'équations allométriques (e.g. biomasse, volume) à partir des relevés d'inventaire.
L’approche à l’arbre est basée sur l’identification de chacun des arbres dans un nuage de points lidar, identification qui passe généralement par la reconnaissance des apices puis la segmentation des houppiers (Figure I.1). Ainsi, lorsque chaque arbre est individualisé, on peut connaître directement la densité d’arbres, leur hauteur et les dimensions de leur couronne. Ces mesures sont utilisées pour estimer indirectement de nombreux attributs forestiers pour chacun des arbres segmentés. Plusieurs facteurs, affectent la qualité de la segmentation et de nouveaux algorithmes ont été développés pour réduire les taux d’omission et de fausses détections des arbres, notamment dans les peuplements multi-strates (Duncanson et al., 2014). L’algorithme PTrees, introduit par Véga et al. (2014), nous a permis de limiter l’impact de la pente et de préserver la géométrie des nuages de points segmentés, avec une amélioration de la segmentation dans différents types de peuplements.
Figure I.1. Approche à l’arbre. Résultats d’une segmentation des houppiers d’une placette de pins dans les Landes, vue de côté (à gauche) et du dessus (à droite).
Grâce à l’évolution de la technologie lidar, les systèmes aéroportés permettent d’acquérir des densités de points de plus en plus élevées nécessaires à une segmentation robuste (Hu et al., 2014). Dans des peuplements simples avec des houppiers espacés, comme celui de la Figure I.1, les algorithmes de segmentation se révèlent très efficaces. Ainsi, l'algorithme PTrees nous a permis de segmenter 82% des arbres avec moins de 10%
de fausses détections. Néanmoins, les performances de l'approche à l’arbre sont fortement réduites dans les peuplements caractérisés par des structures plus complexes (Vauhkonen et al., 2011). Ainsi les faiblesses de cette approche dans les peuplements complexes et les contraintes liées à la densité de points limitent son utilisation opérationnelle.
Figure I.2. Approche à la placette. Principales étapes pour le développement d'un modèle d'estimation d'un attribut forestier et la réalisation d’une carte de cet attribut à partir de données lidar.
Dans l'approche à la placette (en anglais area-based approach), les arbres ne sont pas individualisés, mais le nuage de points lidar d'une placette est considéré dans son ensemble. Cette approche a été introduite par Nelson et al. (1988) puis approfondie par Næsset (1997, 2002, 2004). De nombreuses variables sont extraites de la distribution verticale des échos lidar (i.e. des percentiles de hauteurs et des densités d'échos par strate de hauteur), permettant de décrire la répartition verticale de la végétation (Magnussen and Boudewyn, 1998). Les variables les plus explicatives sont ensuite sélectionnées et des régressions sont effectuées pour mettre en relation ces variables avec des attributs forestiers de référence estimés par des inventaires forestiers traditionnels. Une fois le modèle calibré, il est ensuite validé sur un autre jeu distinct de placettes afin de déterminer la qualité de l'ajustement. La Figure I.2 résume ces différentes étapes qui conduisent à la production d'une carte de la ressource forestière. L’étude suivante se concentre sur cette approche à la placette permettant de développer de nouveaux modèles sur des peuplements rès diversifiés et avec des contraintes moins fortes que l'approche à l'arbre sur la densité de
1.2 Sites d’études
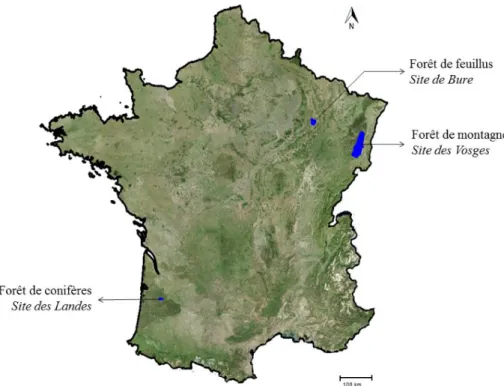
Les modèles développés dans cette étude pour l'évaluation de la ressource forestière ont été testés sur trois zones d’études contrastées (Figure I.3). Le site des Landes (forêt de conifères) est composé de plantations équiennes de pins maritimes. Cette zone représente un cas d’étude simple mais avec de forts enjeux économiques liés à la filière bois. La seconde zone d’étude à proximité de la commune de Bure (forêt de feuillus) est composée de forêts de plaines (Annexe 11). Ce site rassemble des forêts complexes de feuillus avec des peuplements mélangés et multi-strates. Enfin, la troisième zone d’étude est un site de montagne beaucoup plus vaste dans les Vosges (forêt de montagne), composé de peuplements très variés et mélangés (feuillus/conifères).
Figure I.3. Localisation des trois sites d'étude (en bleus).
1.3 Avancées et perspectives
Une approche mécaniste est développée dans ce chapitre pour l'évaluation de la ressource forestière. Cette approche vise à mieux prendre en compte les différentes composantes structurelles des peuplements et limiter le sur-ajustement des modèles. Ainsi, cette étude tente de s'éloigner de l'approche "classique", où les variables utilisées dans les modèles sont choisies statistiquement parmi un grand jeu de variables, par des algorithmes
tels que la régression séquentielle (Næsset, 2002), la classification ascendante hiérarchique (Véga et al., soumis), des arbres de décision ou encore des algorithmes génétiques (Latifi et al., 2010). Les variables utilisées dans ces approches caractérisent généralement la distribution verticale des points lidar (e.g. percentiles de hauteur et densité de points par strate de végétation), elles sont donc souvent colinéaires et, par ailleurs, une partie de l'information contenue dans les données lidar sur la distribution en 3D de la végétation n'est pas prise en compte. Nous avons comparé la méthodologie classique avec une approche plus mécaniste (Durrieu et al., sous presse). L'étude permet de conclure que l'approche mécaniste est pertinente pour le développement de modèles précis et robustes d'estimation de la ressource. Dans l'étude présentée ci-dessous, seules quatre variables lidar ont été sélectionnées pour décrire la structure 3D des peuplements de manière complémentaire. Ces variables permettent de développer des modèles "généralisables" à différents sites d'études pour une évaluation robuste de différents attributs forestiers : volume de bois total, volume de bois marchand, biomasse aérienne et surface terrière.
Si les approches purement statistiques sont remises en question, elles restent néanmoins utiles pour l'exploration de nouvelles variables lidar capables de fournir une meilleure description de la structure des peuplements. Dans cette perspective, nous avons récemment proposé de nouvelles variables basées sur la distance de pénétration des faisceaux laser à travers la canopée (Véga et al., soumis). Ces variables permettent de limiter la distorsion des nuages de points qui est introduite lors de la normalisation par le modèle numérique de terrain, affectant particulièrement les peuplements avec de fortes pentes. Cette distorsion est à même de rendre les approches moins généralisables car, pour un même peuplement situé sur des pentes différentes, elle va impacter les variables qui servent de base à l’élaboration des modèles. D'autres types de variables lidar devraient aussi être considérés. En effet, l'étude suivante se limite à l'extraction de variables liées à la géométrie du nuage de points et n’utilise que l’information des coordonnées (x,y,z) des points pour le développement de modèles. Des informations supplémentaires pourraient être obtenues, afin d'améliorer encore ces modèles. Des informations supplémentaires pourraient être obtenues, afin d'améliorer ces modèles, en utilisant l'intensité des retours (García et al., 2010) ou bien les formes d'ondes complètes des signaux reçus (Mallet and Bretar, 2009; Cao et al., 2014) lorsqu'elles sont disponibles.
2 Generalizing predictive models of forest inventory attributes
using an area-based approach with airborne lidar data
Marc Bouvier1,*, Sylvie Durrieu1, Richard A. Fournier2, Jean-Pierre Renaud3
1 UMR TETIS Irstea-Cirad-AgroParisTech/ENGREF, Maison de la Télédétection en Languedoc-Roussillon, 500, rue J.F. Breton BP 5095, 34196 Montpellier Cedex 05, France
2 Centre d’Applications et de Recherches en Télédétection (CARTEL), Département de géomatique appliquée, Université de Sherbrooke, Sherbrooke, Québec, Canada, J1K 2R1 3 Office National des Forêts, 11 rue Ile de Corse, 54000 Nancy, France
Publié dans Remote Sensing of Environment, 156 (2015) 322–334.
2.1 Abstract
This study proposed modifying the conceptual approach that is commonly used to model development of stand attribute estimates using airborne lidar data. New models were developed using an area-based approach to predict wood volume, stem volume, aboveground biomass, and basal-area across a wide range of canopy structures, sites and lidar characteristics. This new modeling approach does not adopt standard approaches of stepwise regression using a series of height metrics derived from airborne lidar. Rather, it used four metrics describing complementary 3D structural aspects of the stand canopy. The first three metrics were related to mean canopy height, height heterogeneity, and horizontal canopy distribution. A fourth metric was calculated as the coefficient of variation of the leaf area density profile. This fourth metric provided information on understory vegetation. The models that were developed with the four structural metrics provided higher estimation accuracy on stand attributes than models using height metrics alone, while also avoiding data over-fitting. Overall, the models provided prediction error levels ranging from 12.4 % to 24.2 %, depending upon forest type and stand attribute. The more homogeneous coniferous stand provided the highest estimation accuracy. Estimation errors were significantly reduced in mixed forest when separate models were developed for individual stand types (coniferous, mixed and deciduous stands) instead of a general model for all stand types. Model robustness was also evaluated in leaf-off and leaf-on conditions where both conditions provided similar estimation errors.
Keywords: Canopy structure, Forest inventory, Airborne lidar, Model generalization,
2.2 Introduction
Total aboveground woody volume (hereafter referred to as wood volume) and the stem merchantable volume of a tree (hereafter referred to as stem volume) are key forest inventory attributes that are required by forest managers. Reliable mapping of both volumes facilitates the implementation of sustainable management strategies and practices. These practices enable logging be optimized while contributing to forest ecosystem preservation and climate change mitigation (Picard, Saint-André, & Henry, 2012). Biomass of forest stands, including both aboveground and belowground components, is another attribute that is required to improve our knowledge of the carbon cycle. Wood volume, stem volume and aboveground biomass (AGB) are interdependent, and there are strong correlations among these three attributes (Brown and Lugo, 1984; Fang et al., 1996). Most forest inventory programs estimate wood and stem volumes from field measurements of stem diameter from sampled trees. Tree heights are also measured, but generally only from a subset of individuals, as height measurements are more difficult and costly to collect than those for stem diameter (Avery and Burkhart, 2001; Kangas and Maltamo, 2006). Forest inventories generally use random or systematic sampling schemes (Scott and Gove, 2002). In both approaches, a limited number of plots are inventoried because this work is both costly and time-consuming. Furthermore, field measurements can only be performed in areas that are accessible to field crews. Remote sensing has the potential to provide quick and accurate measurements of stand attributes over large areas at a much lower cost than with traditional inventory practices. Using remote sensing data, coupled with a small number of field measurements, can thus be an effective solution for overcoming the aforementioned drawbacks of field measurements, while providing accurate and timely information on several key forest attributes.
Optical and radar remote sensing have been widely used to map forest structural attributes and biophysical parameters (Le Toan et al., 1992; Franklin, 2001; Leboeuf et al., 2012). Assessment of wood volume and ABG remains challenging, especially for forests with high AGB levels (Cohen and Spies, 1992; Leboeuf et al., 2012). In a recent study, Zolkos et al. (2013) analyzed a large set of published studies on AGB assessment from remote sensing data. The authors have brought to light the considerable variability in the accuracy of AGB predictions according to both forest environment and remote sensing data used.
Lidar has emerged as one of the very promising technologies for forest applications and its potential for forest attribute estimation at several scales is widely acknowledged
(Nelson et al., 1988; Næsset, 2004b; Leeuwen and Nieuwenhuis, 2010). These active systems provide precise distance measurements that are based on elapsed time between the emission of a laser pulse and the measurement of the return signal. The spatial position of all the recorded returns upon the Earth’s surface is calculated from both the position and orientation of the lidar system. These are measured using a differential global positioning system (DGPS) and an accurate inertial unit. The resulting point cloud is processed to assess diverse lidar metrics. Lidar systems have either a small footprint (0.1 – 0.3 m) or a large footprint (8 – 70 m) (Lim et al., 2003b). Both of these systems have been used to estimate forest inventory attributes (Lefsky et al., 1999a; Means et al., 2000; Lefsky et al., 2002; Næsset, 2002). Airborne Laser Scanner (ALS) is a lidar system combined with a scanning system. ALS is thus able to record data over a swath, the width of which depends upon both the scanning angle and flight altitude. These systems can be used to provide wall-to-wall coverage of areas of interest (Wulder et al., 2012). Two approaches can be applied using small-footprint discrete return ALS: (1) a tree-based approach (Li et al., 2012; Maltamo et al., 2004; Popescu et al., 2003; Véga et al., 2014); or (2) an area-based approach (ABA) (Nelson et al., 1988; Næsset, 1997; Means et al., 2000; Næsset, 2002). Current ALS that offer high sampling rates can be used to estimate single-tree attributes in a tree-based approach. However, individual tree segmentation algorithms frequently can be difficult to implement because they generate omission and inclusion errors when individualizing trees (Falkowski et al., 2006; Goerndt et al., 2010; Véga and Durrieu, 2011). Overlapping tree crowns can add confusion when identifying individual trees (Gleason and Im, 2011). Therefore, detection performance regarding individual trees is reduced in complex stands. ABAs are commonly used to generate maps of forest attributes in diverse forest biomes, temperate forests (Hall et al., 2005; Zhao & Popescu, 2009), boreal forests (Lim et al., 2003a; Næsset and Gobakken, 2008), tropical forests (Asner, 2009; Kronseder et al., 2012), and savannah woodlands (Lucas et al., 2006). In such approaches, stand attribute estimations are computed from the statistical relationships between plot-level lidar metrics that are commonly extracted from point cloud data and stand attributes, which are derived from field plots. In general, numerous candidate metrics are derived from point height distributions at the plot-level, e.g., maximum and mean height values, percentiles of the distributions, and canopy densities (Næsset, 2002). Metrics that provide the greatest explanation are then selected, with only a few remaining in the final model (Lim et al., 2003b; Lim and Treitz, 2004; Patenaude et al., 2004; Hall et al., 2005). ABAs have been used to develop models for specific forested areas and for specific species or a specific group of species, which has led to a huge number of different models using diverse lidar metrics.
Currently, ABAs that are used to predict stand attributes have two major drawbacks, despite their proven usefulness for forest inventory and mapping (Næsset, 2002). The first drawback stems from the fact that candidate metrics generated from lidar data are known to be strongly inter-correlated (Chen, 2013). Furthermore, too many candidate metrics are generated, which complicates metric selection and the development of robust models (Hall et al., 2005; Khan et al., 2007; Magnussen et al., 2012). The second drawback is that metrics used to describe stand structure are generally derived from the vertical distribution of lidar returns. Indeed, these metrics do not sufficiently take into account several other canopy characteristics, including horizontal canopy heterogeneity. To overcome these drawbacks, new metrics have been identified to enhance the description of tree spatial distributions and, consequently, stand attribute predictions. For instance, canopy volume and canopy cover metrics have proved to be useful for AGB and volume estimation, in addition to height metrics (Hall et al., 2005; Chen et al., 2007; Næsset and Gobakken, 2008; Kim et al., 2009). These metrics take into account horizontal vegetation structures within model predictions. Other metrics have been estimated from the vegetation density profile. Profiles were integrated to estimate the distribution and total amount of foliage. These metrics have proved to be valuable for stand and tree attribute estimation (Lefsky et al., 1999b; Allouis et al., 2013). In such approaches, new metrics are generally identified, which are deemed to be unbiased and consistently meaningful (Magnussen & Boudewyn, 1998). The use of meaningful metrics that describe the 3D structural aspects of the stand canopy could help overcome the current limitations of ABA.
Model generalization is a key question that must be addressed to predict stand structural attributes (Chen, 2010). Few studies have assessed the potential of some lidar metrics for the prediction of diverse stand attributes or across diverse forest area types. Lefsky et al. (1999b) found that the quadratic mean canopy height (QMCH) improved estimates of AGB and basal area (BA). Lim et al. (2003a) used mean laser height that was computed from filtered lidar returns, based upon the intensity return values, to estimate wood volume, AGB and BA. Magnussen et al. (2012) proposed a conceptual model for predicting tree-size-related forest attributes from the height and variance of the canopy that was estimated from first returns. Lefsky et al. (2002) proposed a single equation for estimating AGB in three distinct biomes, which meant that when these models were applied to several forest types, they usually only required a calibration for each forest area type. The same metrics and model shape were maintained when moving from one area to another. A model generalization framework has yet to be developed using metrics that describe stand spatial heterogeneity, such as those reflecting both tree height and spatial
The goal of this study was to develop predictive models of forest stand attributes from ALS data using ABA, which offered high generalization potential. Therefore, the predictive models 1) should be applicable to several useful forest attributes in diverse forest types, 2) use the same lidar metrics, and 3) have a single model shape. Two specific objectives were identified. First, based on a conceptual approach, we identified four complementary lidar metrics for characterizing 3D structure of diverse stands. We assessed their relevance for implementation of prediction models. Second, we tested the generalizability of the model by evaluating its performance: (1) for the prediction of several variables, i.e., wood volume, stem volume, AGB and BA; (2) over a wide range of canopy structure; and (3) in leaf-off and leaf-on conditions.
2.3 Materials
2.3.1 Study sites
Three study sites were selected that represented the diversity of French forests. These included monospecific plantations of coniferous trees (coniferous site), a set of multi-layered deciduous stands (deciduous site), and a mountainous forest environment containing coniferous, deciduous and mixed stand types (mountainous site). Study site descriptions are summarized in Table I.1.
The coniferous site was comprised of a 60 km² area that was located in the Landes region of southwestern France (44.40° N, 0.50° W). Climate of the region is oceanic (Joly et al., 2010). The Landes forest is characterized by nutrient-poor, sandy soil with a flat topography. The site is dominated by mono-specific stands of maritime pine (Pinus
pinaster Aiton) in even-aged plantations.
The deciduous site was a 60 km² area that was located in the Observatoire Pérenne de l'Environnement in the Lorraine region of northeastern France (48.53° N, 5.37° E). Regional climate is semi-continental, and subject to an oceanic influence (Joly et al., 2010). The Lorraine forest is fragmented and highly managed. The forests in the selected areas are largely multi-layered and composed of many deciduous species, but are dominated by European beech (Fagus sylvatic L.), European hornbeam (Carpinus betulus L.), and Sycamore maple (Acer pseudoplatanus L.).
The mountainous site was comprised of a 1200 km² area that was located in the Vosges region in northeastern France (48.03° N, 7.08° E). The region's climate is semi-continental (Joly et al., 2010). The area is characterized by hilly topography, with elevations ranging from about 120 m to 1420 m. The Vosges forest is composed of pure coniferous stands, pure deciduous stands, and mixed stands. Stands of that area are typically heterogeneous and uneven-aged dominated by European beech, European silver fir (Abies alba Miller), and Norway spruce (Picea abies (L.) H.Karst).
2.3.2 Field plot data
Data were obtained for a series of field plots that were located in each study site for ground truthing; these values were later used to calibrate and validate the predictive models with ALS data. Field plot data were collected from 39 circular plots at the coniferous site from April to June 2011. For trees that had a diameter at breast height (DBH, 1.3 m) greater than 17.5 cm, 31 plots were established, each of which had a radius of 15 m. When trees were encountered that had a smaller diameter, the plot radius was reduced to 6 m; 8 of these plots were established. Species, tree status (i.e., dominant, co-dominant, dominant), height, and DBH were collected for all trees with DBH > 7.5 cm. Field-plot centre positions were measured using differential GPS (Leica GPS 120, Switzerland) with sub-metre accuracy. The GPS unit was placed in an opening adjacent to the plot and away from dense cover. A total station (Leica TS02, Switzerland) was used to measure the exact distance to each plot centre.
Field plot data were collected in 28 circular plots (15 m radius) at the deciduous site from November 2009 to February 2010. Species, tree status and DBH were collected for all trees with DBH > 17.5 cm and within a 6 m radius subplot for trees with a DBH between 7.5 cm and 17.5 cm. Six dominant tree heights were measured on each plot.
The same protocol was applied to 92 circular plots at the mountainous site with measurements taken from February to April 2012. Field plot centre positions were measured using differential GPS (Trimble GeoXT 3000 or GeoXT 6000, USA) for both the deciduous and mountainous sites. Differential corrections were then applied using the closest fixed antenna for position accuracy, which was assumed to vary between 0 and 4 metres. Plot position was further adjusted manually using lidar data.
Wood volume, stem volume, AGB and BA were either measured or estimated for each field plot. Field measurements and forest attributes are summarized in Table I.1. BA (m²/ha) was estimated as the cross-sectional area of an individual tree at breast height (1.3 m above the ground), as calculated from the measured DBH. Wood volume and stem volume were measured in m3/ha. Wood volume is equal to the sum of total tree volumes for the stand including stumps and branches, whereas stem volume is equal to the sum of trunk volumes with DBH > 7 cm. AGB is the dry mass (Mg/ha) of the summed tree elements that are above ground, including stems, branches, and leaves. Wood volume and AGB were derived using allometric equations that included tree DBH (cm) and height (H, m) measurements as explanatory variables for all the trees that were located within the plot and which were then rescaled to a per hectare basis. Heights were estimated for trees without height measurements using plot- or site-specific exponential regressions with DBH measurements. The allometric equations that were used to estimate wood volume were constructed for the EMERGE project (Deleuze et al., 2013) and were species- and site-specific. Reference stem volumes were predicted from wood volumes using expansion factors that are provided by Longuetaud et al., (2013). Reference AGBs were predicted using specific equations that have been taken from Genet et al. (2011) and Shaiek et al. (2011) for European beech and maritime pine, respectively. Equations that were taken from Hounzandji et al. (2014) were used for pedunculate oak (Quercus robur L.) and sessile oak (Quercus petraea (Mattuschka) Lieblein). Species-specific equations were missing for other species present on the sites, and therefore, the global wood density database (Zanne et al., 2009) was used to predict reference AGBs from wood volumes.
In addition to measuring the stand attributes, the Gini coefficient was calculated from tree BAs for each plot in the three study sites. The Gini coefficient is used to measure tree size heterogeneity within a forest stand (Lexerød and Eid, 2006). This index has a minimum value of zero, expressing perfect equality when all trees are of equal size; it takes a theoretical maximum value of one, indicating greater size diversity when all trees except one have a value of zero. We also reported tree diversity with each plot with the Shannon index (Magurran, 2004), which accounts for both the abundance and richness of tree species. Shannon indices ranged from zero, when only a single species is present in a stand
to log2(S) (where S is the number of species in a stand), when each tree is a different
Table I.1. Summary of the field plot data for wood volume, stem volume, AGB (Aboveground Biomass) and BA (Basal Area) that were used as reference values to calibrate and validate models.
2.3.3 Lidar data
Data were collected at all sites from small-footprint airborne lidar. The coniferous and deciduous sites were sampled using a LMS-Q560 (Riegl, Austria). ALS data were acquired in April 2011 on the coniferous forest with a pulse density of 8.1 pulses/m². Two acquisitions were made on the deciduous site. The first, under leaf-off conditions with a high pulse density of 17.9 pulses/m², was started in December 2009 and completed in March 2010. The second was acquired in October 2010 under leaf-on conditions, with a pulse density of 20.7 pulses/m². The mountainous site was sampled in March and April 2011 using an ALTM 3100 (Optech, Canada), with a lower pulse density of 3.4 pulses/m². Additional data specifications for the ALS data are given in Table I.2.
Data pre-processing was performed for each study area by the data providers, Sintegra (France) and IGN (France), for the Riegl and Optech data, respectively. Ground points were classified using the TIN-iterative algorithm (Axelsson, 2000). They were used to produce raster digital terrain model (DTM) with a 1 m cell grid. The DTM was used to subtract the ground elevation from lidar point elevations to obtain their aboveground heights, thereby removing the effect of topography from the lidar metrics. The resulting lidar point clouds were extracted according to the spatial extent of each field plot.
Coniferous site Deciduous site Mountainous site
Min Mean Max Min Mean Max Min Mean Max
Slope (%) 1.1 3.3 12.2 2.1 9.2 29.4 2.2 38.7 76.4
Mean tree height (m) 5.0 18.4 29.5 9.9 17.3 39.5 5.5 17.5 35.4
Stem density (tree/ha) 142 464 1415 72 492 1691 85 740 2667
Gini coefficient 0.10 0.19 0.42 0.16 0.41 0.73 0.10 0.39 0.68
Shannon index 0 0.07 0.76 0 0.93 2.19 0 1.10 2.82
Wood volume (m3/ha) 11.1 204.2 538.0 12.4 194.3 358.1 5.3 453.0 1027.5
Stem volume (m3/ha) 4.8 187.8 508.1 7.9 136.5 247.9 2.8 396.0 965.9
AGB (Mg/ha) 9.5 84.3 193.6 6.9 123.8 221.3 2.6 205.9 401.1
Table I.2. Technical specifications for the ALS sensor and data that were acquired for the three test sites.
Coniferous site
Deciduous site
Mountainous site
Leaf-off Leaf-on
Date of survey April 2011 Dec. 2009 and
Mar. 2010 October 2010
March-April 2011
ALS sensor Riegl
LMS-Q560 Riegl LMS-Q560 Riegl LMS-Q560 Optech ALTM3100 Wavelength (nm) 1550 1550 1550 1064 Scan angle 29.5 29.5 29.5 16
Beam divergence (mrad) 0.5 0.5 0.5 0.8
Footprint diameter (cm) 27.5 27.5 27.5 120
Ground speed (m/s) 50 50 45 80
Recovery rate (%) 40 60 60 55
Repetition rate (Hz) 100 100 100 71
Pulse density (pulses/m²) 8.0 18.0 20.5 3.5
Flight altitude (m) 550 550 550 1500
2.4 Methods
We adopted an ABA to develop a generic model for stand attribute predictions. Data processing was performed in the R statistical environment (http://www.r-project.org/). We first defined four complementary ALS metrics that were linked to both the vertical and horizontal distributions of the forest elements. Our approach aimed to eliminate the search step that is commonly used to identify the best metric from amongst a multitude of potential lidar metrics. Four metrics were identified to construct a single equation. Regression analyses were applied for model calibration to predict diverse stand attributes, i.e., wood volume, stem volume, AGB and BA, in diverse forest types, i.e., the coniferous, deciduous and mountainous sites. Models were validated to evaluate the generalization capacity of the model by comparing its performances for each stand attribute that was predicted over each study site.
2.4.1 Selection of lidar metrics
Amongst the numerous height metrics that have been used for stand attribute predictions, heights that are measured by LiDAR have been shown to be closely correlated with the stand attributes upon which our study focuses (Lefsky et al., 1999b; Dubayah et al., 2000; Means et al., 2000). Individual tree heights are not identified in the ABAs. Instead, an average canopy height (𝜇𝐶𝐻) was estimated from the lidar point cloud as the
most important predictor variable (Lefsky et al., 2002; Asner et al., 2012). In general, 𝜇𝐶𝐻 is calculated from lidar data using first return heights. Non-tree returns must be excluded from the point cloud to develop robust predictive models (Nilsson, 1996). Thus, the first selected metric is 𝜇𝐶𝐻 and was calculated after applying a threshold value of 2 m for removing ground and understory laser hits prior to its calculation. Nevertheless, there may be other lidar metrics that could improve the estimation of stand attributes, as described below.
Most allometric equations are non-linear, including those used in this study dealing with the relationships between height and diameter, volume or AGB for a tree (Schumacher and Hall., 1933; Chave et al., 2005). When shifting to the stand-level, the predicted attributes correspond to the sum of individual tree attributes in the stand, whereas our first selected metric, 𝜇𝐶𝐻, is an average value of canopy height. Jensen (1906) stated that for a non-linear function, a function of an average value 𝑓(𝑥̅) does not equal the average of the same function 𝑓(𝑥)̅̅̅̅̅̅. This inequality implies that for any non-linear function, the variance has consequences that cannot be inferred from the average value alone. Ruel & Ayres (1999) have used Jensen’s inequality in environmental issues and have argued that whenever biological systems involve non-linear responses, the description and interpretation of environmental data should include an explicit consideration of the variance. In our case, this amounts to saying that a stand cannot be summarized as a set of “mean trees” when using height to assess stand attributes. Within the ABAs, an indicator of tree height heterogeneity at plot level thus should be used in addition to an indicator of mean height to link structural information that is derived from lidar at the plot-level with a sum of tree attributes that are assessed from field measurements. We therefore chose to use variation in canopy height (𝜎𝐶𝐻2 ) to characterize tree height heterogeneity. The 𝜎𝐶𝐻2 was calculated as the variance of first return heights, considering only returns above 2 m, thereby providing a second metric that was potentially useful for improving predictive models.