A certified numerical algorithm for the topology of resultant and discriminant curves
Texte intégral
Figure



Documents relatifs
The heavy black curves indicate the total comoving volume sampled towards the three ZEN2 cluster fields (dotted; shown as a dashed blue line online), the comoving volume sampled
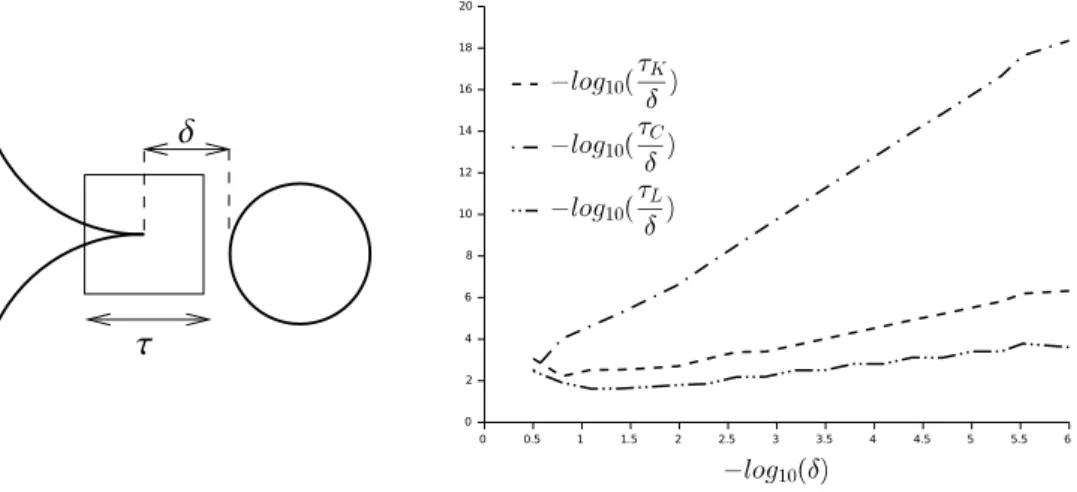
For a given parametric representation of a curve, PTOPO computes the special points on the curve, the characteristic box, the corresponding graph, and then it visualizes the
Vous pouvez aussi rejoindre l’un des nombreux GROUPES associés, ou le quitter si un ami vous y a inclus et qu’il ne vous convient pas (beaucoup l’ignorent, mais il est
The case study enables us to determine that the model-based repository approach leads to a reduced number or to a simplification of the engineering process steps, whereas the
Dans le cadre de la mise en œuvre des contractions hiérarchiques pour le cas stochastique, les premières opérations concernent les chemins, définis principalement par une séquence
However, the low level of POMA (approximately 0.1 mg) that is present in the conductive polymer blend, and the high level of TFA doping, should provide negligible capacity
La dualité Tannakienne pour les réseaux Tannakiens donne une équivalence entre C(X/S) ◦ et la catégorie des représentations localement libres d’un schéma en groupes G(X/S) affine
Component C Interface (c) getData setData OBSW Architecture OBSW Architecture Component A Component B Simulink/OBSW Interface Interfaced Component Simulink Simulink Component
