I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
Remerciements
Tlout trævai,[réussÉ d;cms ûa vÉe nécesstte enj)remier aeu da
6énéd;iction de Di,eu, et ensui,te ['cride et de support de
jJûusiews j)ersomes. nous tiens donc à remercter et à
adiyesser notre recomoti,sscmce à toute j)ersome qui m'a
cridé de ûoi;m ou de ]9rés afim de réaaser ['um de mes rêves . . .
Tiout d'abord:, je tiens à remercter trés vi;vement mon
di;yectew diu mémoiye, JA. g\4A:OucgfE, j)ow ses qua[ités
hu:iirLcrimes et sc£enltfiques. Je ne powraÉ jæ:imotis oubûi,er sa
gentiüûesse, sa générostté, son esprtt de recherche et ses
coiin:mentai;yes ef f icaces. rum gramd merci de iirL ' owotr domé
[a chamce d;e réa[iser ce modeste trcwori,[.
Je reiiiiLerci,e vi;vement ûes iirLem6res djujwy pow de souti,en
et ['imtérêt qu 'iÆs ont j)ortés à ce trcwai[.
Pow termi;me'r, j'ad;yesse mon grcmd a:m,ow à mes
jJcwents, mon ]9ére pow son sacrtfice irirLa mére jJow sa
tendjyesse, et mes fréres et sœuys, c 'est grâce à ûew cmryLow et
ûeuys sacrtfices que ce irirLémoi;re a été mené à bome firL. J\4on
pûus grcmdsouhatt dcms cette vie, c 'est de ûes votr toujows à
côté de moi,, en 6ome somté, heuyeux et que daj)aix soti a;vec
eux.
DÉDICACE
À chaque fois qu'on achève une étape importante dans notre vie, on fait pensée
pour se rappeler de ces personnes qui ont partagé avec nous tous les bons moments
de notre existence, mais surtout les mauvais. Ces personnes qui nous ont aidés sans
qu'on leur demande, soutenus sans réserve, aimé sans compter, ces personnes qui
en cru nous et que grâce a qui notre bonheur et joie reviennent de droit, à qui un
malheur en nous, en eux transforme en pleur.
Je dédie ce modeste mémoire qui est l'accomplissement de langues années
d'étude, en premier lieu:
À ma très chère mère à qui je doit beaucoup pour ces saŒifices, son amour, son
aide et son soutien.
À mon père qui m'a soutenu et à su me donner courage au moment venu.
À mes fi.ère.
À tous les membres de la famille.
À mes très chères amis.
À tous (tes) mes collègues
Sommaire
Introduction Générale
CHAPITRE I
Modé]isation et simu]ation de la machine asynchrone
1.1. Introduction
1.2. Modélisation de la machine asynchrone 1.2.1. Hypothèses simplificatrices
1.2.2. Modèle mathématique du moteur asynchrone triphasé 1.2.3. Modèle mathématique biphasée du moteur asynchrone 1.3.1 Transformation de Park
1.3.2. Ecriture du modèle mathématique biphasée de la machine ...
1
I
I
1
1
1
1
1
1
1
I
I
1.3.3. Choix du repère1.3.4. Expression du modèle de la machine. . .
1.4. Représentation d'état du modèle de la machine asynchrone 1.5. Simulation du modèle d'état
1.6. Interprétation des résultats de simulation
1.7. Conclusion
11.1. Introduction
CHAPITRE 11
Théorie de la commande par mode de g]issement
11.2. Commande par mode de glissement 11.3. Principe de la commande
11.4. Notions de base
11.4.1. Régime glissant
11.4.2. Système mono variable (SISO)
11.4.2.1. Commande par mode glissant statique
11.4.2.1.1. Surface de glissement
11.4.2.1.2. Condition de convergence ... 11.4.2.1.3. Détermination de la loi de commande 11.4.2.1.4. Expression analytique de la commande 11.4.2.1.5. Définition des grandeurs de commande
11.4.2.1.6. Propriétés de robustesse
11.4.2.1.7. Problème de réticence (chattering) 11.4.2.2. Commande par mode glissant dynamique
I
I
1
1
I
1 1I
I
I
1 1I
I
I
I
I
I
I
I
I
II.4.2.2.1.Surface de glissement 11.4.2.2.2. Loi de commande 11.4.3. Système multi variable (MIMO)11.4.3.1. Commande par mode de glissement statique
11.4.3.1.1. Surface de glissement ...
11.4.3.1.2. Condition de convergence
11.4.3.1.3. Loi de commande . . .
11.4.3.2. Commande par mode de glissement dynamique 11.4.3.2.1. Surface de glissement
11.4.3.2.2. Loi de commande
11.5. Conclusion
CHAPITRE 111
App]ication de la commande par mode de glissement
à la machine asynchrone
111.1. Introduction
111.2. Application de la commande par mode glissant statique à la machine asynchrone. 111.2.1. Grandeur à régler
111.2.2 Choix des surfaces de glissement
111.2.3. Calcul de la commande par mode de glissement statique ... 111.2.4. Simulation de la commande par mode de glissement statique ...
111.3. Application de la commande par mode glissant dynamique à la machine asynchrone
111.3.1. Grandeur à régler
111.2. Choix des surfaces de glissement ...
111.3.3. Calcul de la commande par mode de glissement dynamique ... 111.3.4. Simulation de la commande par mode de glissement dynamique ... 111.4. Conclusion
Conclusion Générale
L
•'J
u
u
L
1
1
1
I
1
1
I
I
1
INTRODUCTI0N
GÉNÉRALE
I
I
I
I
I
1
1
1
I
I
I
I
1
1
1
I
I
I
I
I
I
Iiitroduction GénéraleIntroduction Générale
L'automatique a introduit ces dernières années divers outils destinés à l'étude des systèmes linéaires ou non linéaires, soit pour leur analyse, leur commande ou bien leur identification. Ainsi la commande par mode de glissement fait partie des techniques bien ancrées dans le domaine d'électrotechnique où elle nous semble être un cadre naturel pour étudier les systèmes électrique. En fait, à l'instar de beaucoup de techniques, la commande par mode de glissement est utilisée depuis longtemps par les électrotechniciens, dans sa variante la plus simple qui est la commande par hystérésis. La commande par mode de glissement, ou bien la
commande à structure variable, a donc pris beaucoup d'importance tant du point de vue pratique
que théorique. Malgré ses qualités, l'utilisation de la commande par mode de glissement en électrotechnique s'est vue limitée aux applications, en raison, principalement de la technologie existante en matière d'interrupteurs. Ce n'est qu'à partir de la fin des amées 80, que cette technique devient un pôle d'intérêt pour l'électrotechnicien.
L'objectif principal de ce travail, est d'appliquer cette technique de commande sur un système électrique qui est la machine asynchrone. Dans le but d'approfondir chacun des points mentionnés ci-dessus, ce mémoire de fin d'étude est organisé comme suit.
Dans le chapitre 1, on donne les éléments de modélisation, sa représentation dans
différents repères (triphasé et biphasé), et finalement nous terminant par une simulation d'un
système machine électrique asynchrone.
Le chapitre 11 est consacré à la théorie de la commande par mode de glissement, où cette commande est brièvement abordée, notre ambition ici n'est pas de faire une présentation exhaustive, 1a littérature en fait largement part, nous allons seulement donner les deux types de commandes qui nous concerne : 1a commande par mode de glissement statique et sa version amélioré appelée dynamique.
Dans le chapitre 111 nous présentons la stratégie de commande, basée sur une structure variable, qui est la commande par mode de glissement. Celle-ci nous permettra de sumonter un problème d'ambigu.i.té rencontré daiis les approches classique de commande des convertisseur de puissance, nous terminons le chapitre par une simulation de la commande d'un système électrique convertisseur de puissance, avec une comparaison des deux cas, boucle ouverte (sans aucune commande) et boucle fermée (avec loi de commande par mode de glissement).
U D 1 1 1
I
CHAPITRE I
Modélisation et simulation
! delamachineasynchrone
1 1I
il 11
J
I
I
1
1
I
I
I
I
I
I
I
1
1
I
I
I
1
1
I
1
1
I
I
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
1.1. Introduction
La machine asynchrone, de part sa simplicité de conception et d'entretien, a la faveur
des industriels depuis son invention par Nikola Tesla en 1890, quand il découvrit les
champs magnétiques toumants engendrés par un système de courants polyphasés. Cette
simplicité s'accompagne toutefois d'une grande complexité physique,1iée aux interactions électromagnétiques entre le stator et le rotor. La modélisation est une étape très importante et nécessaire, que soit pour étudier les comportements ou/et élaborer des commandes des
différentes types des machines (à courant continu DC ou altematif AC).
Dans ce chapitre, nous proposons la modélisation classique de la machine asynchrone en utilisant les transformations de Park, nous citons les propriétés des différents repères et les
équations mathématiques (magnétiques, électriques et mécanique) qui gèrent la machine dans
chaque repère. Puis nous étudions la simulation à vide, en charge et inversion de sens de rotation. 1.2. Modélisation de la machine asynchrone [1]
1.2.1. Hypothèses simplificatrices
Pour établir des relations simples entre les tensions d'alimentation du moteur et ses courants, il
faut s'appuyer sur un certain nombre d'hypothèses :
Le bobinage est réparti de manière à donner une f.m.m. sinuso.i.dale s'il est alimenté par des courants sinuso.i.daux.
Nous supposerons également que nous travaillons en régime non saturé.
Nous négligeons le phénomène d'hystérésis, les courants de Foucault et l'effet de peau. Enfin, le régime homopolaire est nul puisque le neutre n'est pas relié à la terre (isolé).
Ces choix signifient entre autres que :
Les flux sont additifs, les inductances propres sont constantes, il y a une variation sinuso.i.dale des inductances mutuelles entre les enroulements statoriques et rotoriques en fonction de l'angle électrique de leurs axes magnétiques.
1.2.2. Modèle mathématique du moteur asynchrone triphasé
Le modèle mathématique permet principalement d'observer les différentes évolutions des grandeurs électromécaniques d'une part, et d'autre part de prévoir le contrôle nécessaire pour palier aux différents pi.oblèmes qui accompagnent les opérations de variation de charge,
de vitesse. . .etc.
I
I
1
1
I
1
1
I
I
I
1
1
1
I
1
1
I
I
1
1
Chapitre l Modélisation et simulation de la machine asynchrone
La machine est alimentée en tension, les composantes du vecteur de commande de l'équation d'état seront donc des tensions. Les différentes grandeurs seront, dans un premier temps exprimées dans leurs repères respectifs.
Figure (1.1) : Modèle des enroulements statoriques et rotoriques d'une MAS
Les enroulements des trois phases statoriques et des trois phases rotoriques dans l'espace peuvent être représentés comme indiqué sur la Figure (1.1). Les phases rotoriques sont court-circuitées sur elle mêmes. é7 est l'angle électrique entre l'axe de la phase cz statorique et la
phase cz rotorique.
La loi de Faraday permet d'écrire :
v=Ri+d4P_
c7'
(1.1)
1.2.2.1. Au stator
L'écriture matricielle condensée pour les trois phases statoriques est résumé par ces écritures:
I
I
I
I
I
1
1
I
I
I
1
1
1
1 1 1 1I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
a. Equation électrique:
[y„bc]=[Æslj"bc]+#Œhc]
Cette notation est l'écriture condensée de :
La résistance statorique étant la même pour les trois phases:
Rs-Ra,s--Rbs-Rcs
b. Equation magnétique :
[®"„]-[£J'.s,aJ+[A4"H,'„..]
Cette notation est l'écriture condensée de :
costo) co(G+¥)
co(o+¥) costo)
co{O+¥) co{O+¥)
Avec :
£j, , Æj, résistance et inductances propre d'une phase rotorique
1.2.2.2. Au rotor a. Equation électrique
[ytic]=[Ær]['.;Übc]+£[®rûbc]
Le rotor étant en court-circuit, ses tensions sont nulles.
(1.2)
(1.3)
I
II
I
I
1 1I
I
I
1 11
I
I
I
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
®,Œ ®,b ®„. De même : Rr -Rar -Rbr -Rcr b. Equation magnétique [®mbci]=[£r]['.mbci]+[A4J['.sabc]
Cette notation est l'écriture condensée de :
lr MrMr Mr lr Mr MrMr lr (1.7) Sachant que : [A4„]=[A4„T=A4o On aura finalement :
cos(O) cos(O+¥) cos(O-¥)
cos(G-¥) cos(G) cos(O+¥)
cos(O+¥) cos(G-¥) cos(G)
[yL`¢c]=[Æs][Z.L,dc]+#([£ù][Z.sabc]+[A4„][Z.ric]) [ymbc]=[Ær]['./Übc]+#([£r][7.mbc]+["/s][Z.bdc])
a.10)
(1.11 )
(1.12)
1.2.3. Modèle mathématique biphasée du moteur asynchrone
Pour réduire l'ordre du système et fait rendre les équations indépendantes du temps on
introduit la transformation de park.
I
1 1I
I
1 1I
I
I
I
I
I
1 1 1 1 1I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
1.3.1. Transformation de Park [2]
A cause de la complexité et la non linéarité des équations précédentes il est difficile de simuler le système, alors il est indispensable de transfomer le système triphasé équilibré (c7,6 ,c) en un
système biphasé (d,g) par la transformation de Park. A condition de conserver la force
magnétomotrice et la puissance instantanée.
"gure (1. Z) .. Transf iormation de Park
La transformation de Park normalisée est obtenue à l'aide de la matrice de passage :
b(o)]-#
cos(O) cos(O-¥) cos(O+¥)
-sino -sin(O-¥) -sin(O+¥)
H fl fl
7Ï2 7f2 7f2
Œ.13)
Le changement de variables relatif aux courants, tensions et flux est défini par la transformation :
[d,g] = [p(O)][o b c]
I
I
I
I
I
I
I
1
1
1
I
I
I
I
I
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
La matrice inverse de la transformation de PARK nomalisée a pour expression :
b(O)]'
-cos(O) -sin(é?)
cos(O-¥) -sin(G-¥)
cos(G+¥) -sin(G+¥)
(1.14)
Alors les variables réelles sont obtenues à partir des variables biphasées (d ,g) par
transformation inverse comme suit :
[¢bc]=h(é?)]-[[d,g] avec:
L'angle é? correspond à la position du repère choisi pour la transfomation.
0 = Os : pour le stator (angle entre l'axe od et la phase cz du stator);
é? = 0, : pour le rotor (angle entre l'axe oc7 et la phase c7 du rotor);
La composante homopolaire est nulle, pour un système triphasé équilibré.
1.3.2. Ecriture du modèle mathématique biphasée de la machine
Apres l'introduction de la transformation de Park, les équations électriques et magnétiques
deviement :
a. Equations électriques
Les équations aux tensions deviennent
•[:"" _oO--][::;]
[
o -(CZJc.oor (CZ)coo, -C°r ) ° (1.15) (1.16)v„ et vn7 sont nuls puisque le rotor étant en court-circuit. ocoor représente la pulsation des axes c7g sur des coordonnés arbitraire.
I I 1 1 I I
I
1 1 1I
1 1I
I
I
I
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
b. Equations magnétiques
L'écriture des flux devient:
[::;]-[:s ;s][;;;]+[ï N[;:]
[::]-[:J ;J][;+[ï N[;:;]
(1.17) (1.18) Où: c7GLs__ts_M.,Lr__]r_M.,M=3_2Mo.„=dz#;.„__dz#;.„oor=d#
c7'Pour que le modèle soit complet, on doit lui adjoindre d'équation mécanique.
c. Equation mécanique
L'étude du comportement de la machine asynchrone aux différents régimes de
fonctionnement en particulier, le régime transitoire met en évidence 1'équation du mouvement qui est définie comme suit :
ce-cr-J#+fn
Donc le couple électromagnétique est donné par l'expression suivante:
cL,-P#®nJ.,-v.7."]
(1.19)
(1.20)
1.3.3. Choix du repère
Jusqu'à présent, nous avons exprimé les équations et les grandeurs de la machine dans unrepère ( d,q ) qui fait un angle électrique 06. avec le stator et qui fait également u-n angle électrique Or avec le rotor, mais qui n'est pas défini par ailleurs c'est à dire qu'il est libre.
11 existe trois choix important. On peut fixer le repère ( c7,g ) au stator, au rotor ou au champ toumant. Rappelons que le repère ( c7,g ) est le repère mobile c'est-à-dire qu'il nous appartient de calculer les angles des transformations de Park Oj. et C7,. afin d'effectuer les rotations.
I
I
I
1
1
1
I
I
1
1
I
I
1
1
1
I
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
11 existe différentes possibilités pour le choix de l'orientation du repère d'axe qui dépendent généralement des objectifs de l'application. On peut choisir le référentiel le mieux adapté aux problèmes posés. Le choix se ramène pratiquement à trois référentiels orthogonaux.
> Référentiel des axes (cÏ,4) : système biphasé à axes orthogonaux (0 = 0)
> Référentiel toumant des axes (c7, g) : système biphasé à axes orthogonaux ( é? = é?s ) > Référentiel des axes (x, )/) : système biphasé à axes orthogonaux ( 0 = 0, ).
Avec l'angle 0 est une position quelconque d'observation que l'on peut choisir de trois manières différentes.
a. Référentiel fixe par rapport au stator
Ce système d'axe est immobile par rapport au stator. Dans ce cas :
o-o-t::;)
œcoo,-d2ï-o
c7'
Les équations électriques prennent la forme suivante :
[
0-a'r
¢.21) (1.22) (1.23) (1./7) (1.18)Ce système peut être utilisé pour régime de démarrage et freinage (dynamique) des machines
asynchrones .
b. Référentiel fixe par rapport au rotor
Ce système d'axes est immobile par rapport au rotor toumant à une vitesse cor .
1 1 1
I
I
1 1 1 1 1 1 1 1 11
I
1
1
1
I
Chapitre l Modé]isation et simulation de ]a machine asynchrone
Dans ce cas :
o-Gr-t::;)
dé7r c7'
= 0)r = æcoor
Les équations électriques prennent la fome suivante :
¢.26)
(1.27)
(1.28)
Ce système est utilisé pour étudier les processus transitoires dans les machines synchrones et asynchrones.
c. Référentiel fixe par rapport au champ tournant
Ce système d'axes toume avec la vitesse de champ électromagnétique co6. crée par les enroulements du stator. Dans ce cas :
G-G5-t:::)
dos,
c7'
--o)Coor--o)S9æ--o)Coor-o)r--æS~o)r
Les équations électriques prennent la forme suivante :
¢.29)
(1.30)
(1.31)
Ce référentiel est souvent utilisé dans l'étude de 1'alimentation des moteurs asynchrones à fréquences variables, comme il est utilisé notamment dans la commande des machines électriques dans les systèmes en boucle femée où les grandeurs à contrôler sont obligatoirement continues.
La description de 1'état magnétique des machines à courant altematif dans le référentiel (d, q) nous conduit à un modèle électromagnétique unifié valable pour toutes les machines standards:
1
1
1
I
I
I
I
1
1
1
I
1 1 1 1I
1 1Chapitre l Modélisation et simulation de la machine asynchrone
machine asynchrone à rotor bobiné ou à cage, machine synchrone à pôles lisses ou à pôles
saillants, machines à aimants pemanents et machine à réluctance.
Dans notre cas, nous avons choisi le repère immobile par rapport au stator. et dans ce cas le modèle s'obtient de la manière suivante :
1.3.4. Expression du modèle de la machine
Le modèle de la machine asynchrone sera exprimé, dans notre cas, dans le repère
statique(c¥Æ), et nous allons choisir le flux rotorique ¢rcr ,¢„ comme et le courant statorique z.„ , 7.„ variables d'état, pour cela nous devons effectuer une recherche des équations différentielles qui décrivent ces deux variables et cela à partir du modèle donné par les équations
(1.22), (1.23), (1.24), et (1.25).
• Equations des flux rotoriques ¢„ ,¢„
à partir de (1.23) et (1.25) :
(1.32)
En remplaçant (1.33) dans (1.32), on obtient alors :
M%isa-¥rpra-æpfl
M%isp+Œpra-%Pfl
notant que cz) = p Q .
• Equations des courant statoriques J.„ , 7.„
À partir de dérivée (1.24) et après dérivation :
(1.33)
(1.34)
(1.35)
1
I
I
11
1
1
1
1
I
I
1
1
I
1
1
I
Chapitre l Modélisation et simulation de la machine asynchrone
de (1.22) on écrit :
#:]=[-:s
En dérivant (1.33), on obtient :
En remplaçant les équations (1.32), (1.34) et (1.35) dans (1.33) :
-yisa+f+bQprp
Æ
-yisp-kppra+frprp
En plus, l'expression de la vitesse est :
d#-p#,(¢rajsp-¢rpjsa)-5Q-CÏ
dt JL.``ru" 'rp.u' J J (1.36) (1.37) (1.38) (1.39)1.4. Représentation d'état du modèle de la machine asynchrone [3]
Le modèle utilisé dans ce chapitre est un modèle de Park classique pou lequel nous exprimons les grandeurs électriques dans un repère dit « repère fixe lié au stator » ; Le modèle d'état de la machine asynchrone, dans ce référentiel est une représentation non linéaire de la
machine obtenue à partir des équations (1.32), (1.36) et (1.37).11 peut être s'écrit sous la fome :
..=.''=:`EEEE
Æ -yisa+frpra+kpç2prp Æ-yisp-kpç2pra+irprp
A4.1+Ërisa-irpra-pçlprp
1MTrisp+PQpra-+rprp
#(Pratsp-Prptsa)-
f-ç2-C-JJ
Page 121
1
1
I
I
1
1
I
I
I
I
I
1
1
1
1
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
sous forme condensé :
X - f (x ) + g (x h`
où: x=(z.„ z.„ ®„ ®„ Q)` :vecteurd'état; w =(v„ v„)' : Vecteurde commande./(x)=
Avec : -yisa+Kîr®ra+pkQ®rp -yi`p+KFr®rp-PkQ®raïtsa_±r®ra_pQ®rp
A4.MTlsp-:-PQ®ra
A4.p#,(®rajsp-®rpjsa)-+-JUÇ2W"
Tr-#;Œ-1-
A4£,,£r
M .^,_Rs ,RrM2;y-_+
c,LSLr„ c,Ls. ŒLSLr2;
g(x)-¢.40) ¢.42)Le vecteur d'état est représenté par quatre grandeurs électriques deux composantes du flux
rotoriques, et deux composantes du courant statorique, et une équation mécanique qui gouveme
la vitesse de rotation.
1.5. Simulation du modèle d'état :
La simulation numérique du modèle mathématique de la machine asynchrone à rotor bobiné
utilisé, pemet d'avoir une idée globale et correcte sur leur performance. La mise sous forme d'équation le modèle de la machine asynchrone permet la simulation de cette demière. L'objectif de l'étude réalisée dans cette section est d'établir un schéma bloc à partir duquel la machine
1
1
I
1
1
1
1
I
I
I
I
I
1
1
I
I
I
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
asynchrone est alimentée directement par le réseau triphasé [220/380V, 50Hz]. Les paramètres de la machine asynchrone utilisée dans ce travail sont donnés .
Les tensions d'alimentation sont supposées parfaitement sinuso.i.dales d'amplitudes
constantes, où y„ =220 V (Valeur efficace de tension) et œ = 2 7r / avec / =50 Hz (Fréquence
du réseau). Les résultats de simulations sont effectués avec le logiciel MTLAB/SIMULINK 7.3, pour une machine asynchrone dont les caractéristiques sont données par le tableau suivant : Tableau 1.1. Caractéristiques de la machine asynchrone utilisée.
+.+`
1111-es '1-Résistance statorique Jt^ç = 9.65Q Résistance rotorique Rr = 4.3047Q Inductance mutuelle £„7 = 0.4475H Inductance statorique £s = 0.4718H Inductance rotorique £r = 0.4718H`:. paramèt
es mécaniq 1Moment d'inertie J = 104e -3 |#g.m2]
Coefficient de frottement / = 13e -3
. 1,
'''''''''''''''1-Puissance nominale 1.1 b4;
Courant nominale 2.6/4.3 L4] Tension nominale 400/ 230 [J'] Facteur de puissance cos¢ = 0.85 /0.82 Nombre de paire de pôles 2
Vitesse nominale 1425 /r/min
On va tester le fonctionnement de la machine dans deux cas différents :
1. un démarrage àvide.
2. un démarrage à vide suivi d'une augmentation du couple de 10 N.m à 1'instant t=2.5
seconds.
I
I
I
I
I
I
1 1 1Chapitre l Modélisation et simu]ation de la machine asynchrone
2 2.5 3 T®mps (soc) 0 0.5 1 1.5 2 2.6 3 3.5 4 Temps (seo) 2253 Temp8 (sec) 2 2.5 3 T®mps (sec) 0.3 0., Tomps (œc) 2 2.5 ® Tomps (8ec)
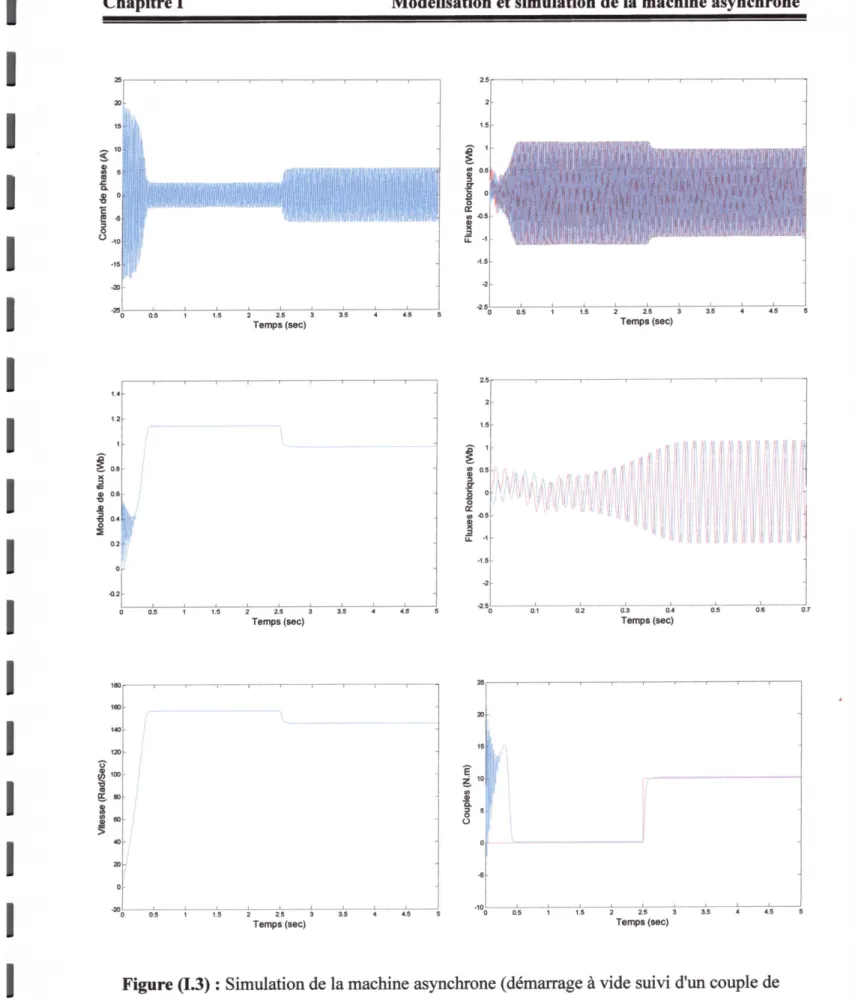
Figure Œ.3) : Simulation de la mæhine asynchrone (démamge à vide suivi d'un couple de
charge de C, = 10N.m à l'instant f = 2.5sec
I
I
I
I
I
I
1I
I
1
1
1
Chapitre l Modélisation et simulation de la machine asynchrone
2 2.5 3 Temps (sec) 0 0.5 1 1.5 2 2.5 3 Tomps (9ec) 2 2.5 3 Temps (sec) 2 2.5 3 Temps (sec) 0.3 0.4 Temps (sec) 2253 Temps (œc)
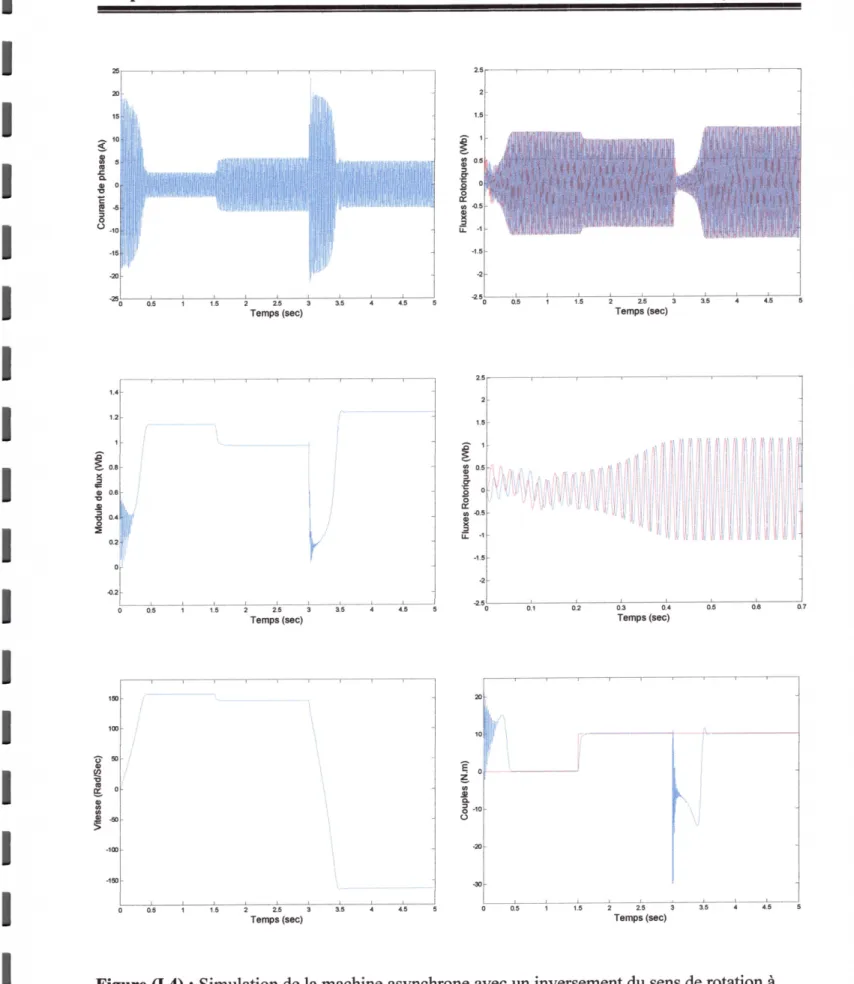
Figure a.4) : Simulation de la machine asynchrone avec un inversement du sens de rotation à
l'instamt/ = 2.5 sec .
I
I
1
1
I
1
1
1
1
I
1
1 1 1 1 1I
1 1I
Chapitre l Modélisation et simulation de la machine asynchrone
1.6. Interprétation des résultats de simulation:
Les résultats de simulation donnés par les figures 1.3 et 1.4 (les deux tests) représentent l'évolution des grandeurs fondamentales de la machine asynchrone : les courants statoriques
(J.j), les flux rotoriques (¢rcri¢r,), le module de flux (¢r), la vitesse (Q) et le couple
électromagnétique (C„ ) .
> Démarrage à vide suivi d'une charge, figure (1-3) : A l'instant (/ = 2.5sec) on a appliqué un couple de charge(Cr =1W.m), pendant le régime transitoire, le couple électromagnétique est fortement pulsatoire par contre en régime stationnaire, le couple électromagnétique tend à compenser les perte par frottement, après le régime transitoire les flux rotoriques ¢„ ef ¢,4 prends des forme sinuso.i.dales, l'allure de la vitesse Q ne reste pas constante, c'est à dire, l'introduction d'un couple de charge provoque une diminution de la vitesse, les courants statoriques (J.„ J.s4 ) présentent des dépassements excessifs avec faible vitesse mais il disparaissent (dépassement dues au régime transitoires) au bout de quelques altemances et on obtient une forme sinuso.i.dale d'amplitude constant.
> Démarrage à vide suivi d'une charge et inversement du sens de rotation : Lorsqu'on inverse deux phases (/ = 3 sec) , et sachant que la machine est déjà chargé avec un couple résistant de (C, = 1W.7%) appliqué à l'instant (/ = 1.5sec) , les même remarques du teste précédent peuvent être tirées et en plus nous pouvons remarquer que la vitesse de la machine diminue jusqu'à zéro et démarre à nouveaux dans le sens contraire, cet inversement du sens de rotation à provoqué la création d'un régime transitoire et crée un fort couple électromagnétique d'environ Ccw =-30N.m à cause de l'inertie de la machine.
1.7. Conclusion :
Dans ce chapitre nous avons pu établir un modèle mathématique de la machine asynchrone triphasée dont la complexité à été réduite, en utilisant un certain nombre d'hypothèses
simplificatrices, en appliquant la transformation de Park pemet de passe du système triphasé
I
I
I
1 1I
1 1 1 1I
I
1 1 1 1I
I
1 1 1Chapitre l Modélisation et simu]ation de la machine asynchrone
vers le système biphasé de Park. Cette modélisation nous a pemis essentiellement de simulé la
machine asynchrone dans le but de voire le comportement et les perfomances lors d'un
démarrage à vide suivi d'une introduction de couple résistant et d'un inversement de sens de rotation, bien sur, avec une interprétation des résultats retrouvée. Lorsqu'on introduit le couple résistant, la vitesse de rotation diminue, ce qui nécessite la régulation de la vitesse par une loi de commande.
La machine est alimentée directement à partir du réseau triphasé équilibré, de fréquence et
d'amplitude des tensions constantes, ce qui impose une vitesse de synchronisme constante.
[ 1 I 1 1 I I I 1 1 I I I I I I 1 1
CHAPITRE 11
Théorie de la commande
par mode de glissement
I
I
I
I
I
I
I
I
I
I
1
1
I
1 1I
I
I
I
1 1Chapitre ll Théorie de la commande par mode de glissement
11.1. Introduction
Dans ce chapitre, une présentation générale d'une approche de la commande non linéaire, à savoir, la commande par mode de glissement est brièvement abordée, notre ambition ici n'est pas de faire une présentation exhaustive, la littérature en fait largement part, nous allons
seulement donner leurs principes respectifs avec quelques notions et définitions nécessaires à leurs applications.
11.2. Commande par mode de glissement
Pour la commande des systèmes non linéaires plusieurs méthodes de commande ont été développées : commande adaptative, commande par mode glissement ,... etc., dans ce contexte, la technique de commande par mode de glissement est spécialement utilisée pour les systèmes incertains.
La commande par mode de glissement est un mode de fonctionnement particulier d'un
système de réglage à structure variable. 11 est caractérisé par une commutation continue et périodique entre deux états et, par conséquence, une méthode de réglage non linéaire.
La commande à structure variable a été inspirée par les travaux du mathématicien j4. F.
PÆ/zPov sur la résolution des équations différentielles à second ordre discontinue, et développée, par la suite, par de nombreux chercheurs (Emilianov, Utkin, Soltine, Young, Harashima . . .etc),
[3] et [4].
Ce chapitre est divisé en deux grandes parties :
•:. le premier est consacré à 1'élaboration d'une loi de commande par mode glissant statique ou on est confronté au problème de « chattering ».
•:. la deuxième partie propose une solution pour ce problème de chattering par
l'introduction de la dynamique dans la loi de commande, cette idée est la base du concept du mode glissant dynamique.
Pour ces deux parties,1'étude est faite pour les systèmes mono variables et les systèmes multi variables.
11.3. Principe de la commande
Les modes glissants pour les systèmes non linéaires ont été largement étudiés et développés depuis leur introduction. L'objectif de la méthode est, à l'aide d'une commande discontinue, de contraindre et forcer le système à évoluer, au bout d'un temps fini, et se
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
maintenir, sur une surface, dite surface de glissement, ou le comportement résultant correspond
aux dynamiques souhaitées.
Le régime du système ainsi commandé est appelé mode glissant et la dynamique de celui-ci peut être rendue insensible aux variations paramétriques, aux erreurs de modélisation et certaines perturbations extemes. La loi de commande par mode glissant est de conception relativement simple et elle présente des qualités de robustesse vis-à-vis de perturbations. Cependant, il existe quelques problèmes comme le phénomène de réticence et la brutalité de la
commande discontinue, ces inconvénients peuvent être vraiment néfastes pour le systèmes en provoquant un souci important dans les modes de fonctionnement, mais aussi, en excitant des
dynamiques de hautes fréquences non modélisées, [3].
11 existe, cependant, différentes méthodes pour diminuer ce phénomène dont 1'une consiste à remplacer la fonction « sign » par une approximation continue au voisinage de la surface de glissement. Une autre méthode consiste à utiliser les modes de glissements dynamiques.
L'idée directrice de la commande à structure variable (commande par mode glissant) est donc
de:
•:. Définir une surface de glissement, fonction de l'état du système.
<. Générer une loi de commande qui commute d'une expression à une autre suivant que l'on se trouve, d'un coté ou d'un autre, de la surface de glissement dans le but de
ramener le système sur cette surface.
Le système sera alors plongé dans l'état d'un système réduit déterminé par la surface de
glissement, [4].
11.4. Notions de base
11.4.1. Régime glissant
On distingue deux sortes de régime glissant, idéal et réel.
> Régime glissant idéal
En théorie, l'organe de commutation est supposé idéal, insensible au bruit, et la trajectoire en régime glissant décrit parfaitement l'équation s(x) = 0 , d'où le régime glissant idéale, [3].
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
Le régime glissant idéal correspond à une oscillation de fréquence infinie et d'amplitude nulle, le point représentatif de 1'évolution du système glisse parfaitement sur l'hypersurface de
commutation S .
Figure 11.1 : Glissement idéal, la fréquence de commutation est infinie avec amplitude nulle.
> Régime glissant réel
En pratique, 1'organe de commutation est réalisé à partir de relais (pour quelques applications tels que les machines électriques) qui présentent des imperfections, comme les retards de commutation, [9].
La trajectoire de phase en régime glissant reste au voisinage da la surface de
commutation, domant naissance à des oscillations indésirable qui diminuent la précision du
système, en gardant néanmoins la stabilité.
Figure 11.2: Glissement réel, la fréquence de commutation finie, amplitude non nulle.
11.4.2. Système mono variable (SISO)
Considérons le système dynamique mono variable suivant :
x(") = /(x) + A/(x) + (g(x) + Ag(x))% x(") = /(x) + g(x)cz + A(x)
(11.1)
I
I
I
1
1
I
I
I
I
I
1
1
I
1
1
1
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
Avec X = [x,* ,..., x("])] : vecteur d'état, x(n la n'éme dérivée dex .
A(x) : Les incertitudes sur le système supposées bomées par une connue Z .
L'objectif de commande consiste à synthétiser une loi de commande par la technique du
mode glissant, assurant la poursuite pour 1'état x d'une trajectoire désirée xd .
xd=[xd,*d (11.2)
Pour que la tache de poursuite soit satisfait dans temps fini,1'état initial désiré doit être tel que :
xd (0) - j¥(0)
11.4.2.1. Commande par mode glissant statique
11.4.2.1.1. Surface de glissement
Le premier objectif d'une commande a mode glissant est de diriger les états du système commandé vers une surface S définie et de maintenir le système sur cette surface. Cette surface
S contribue à définir une fonction linéaire S(j¥) appelée fonction de commutation (swz.fcÆz.#g
/z472cf7.o#) telle que :
e=x-xd L'erreur poursuite de la variablex, et E=x-xd =[e,é ,..., e("[)] le
vecteur de l'erreur de poursuite.
On définit la surface variante dans le temps, dans l'espace d'état Rn , par l'équation
scalaire suivante S(x)= 0 ou :
s",-(;+À)`„1'.e- (113,
S(x,f)=e(" + g(„ï)e(" + ... +9ie=0
À : Constante strictement positive, choisit de façon à assuré la rapidité et la stabilité du système.
En se basant sur la condition initiale, le problème de poursuite x = xd est équivalent à celui de rester sur la surfaces(/)=0 ; Vt>0. En effet S(x)=O représente une équation différentielle linéaire dont la solution unique est e = 0 , avec la condition initiale, [6].
1
I
I
1
1
I
1
1
1
1
1
1
I
1
1
1
1
I
1
1
I
Chapitre ll Théorie de la commande par mode de glissement
Donc le problème de poursuivre d'un vecteur xd de dimension 7? peut être réduit à celui de maintenir la quantité scalaire S à zéro.
11.4.2.1.2. Condition de convergence
Les conditions de convergence permettent aux dynamiques des systèmes de converger
vers les surfaces de glissement. Nous retenons de la littérature deux conditions, celle qui correspondent au mode de convergence de l'état d'un système [5], [6] et [1] :
> Fonction directe de commutation
C'est la première condition de convergence, elle est proposée par UfÆJ.#. Elle s'exprime
sous la fome suivante:
S(x)S(x) < 0 (11.4)
Dans cette condition, il faut introduire pour S(x) et sa dérivée, les valeurs justes à gauche et à droite de la surface de commutation, [1].
> Fonction de Lyapunov
11 s'agit de fomuler une fonction scalaire positive y(S) > 0 pour les variables d'état du système, et de choisir la loi de commande qui fera décroître cette fonction [5].
Cette fonction est généralement utilisée pour garantir la stabilité des systèmes non
linéaires.
En définissant la fonction de Lyapunov par :
y(s,-is2(x,
Sa dérivée est donnée par :
y(S) - S(x)S(x)
(11.5)
(11.6)
Pour que la fonction de lyapunov décroisse, il suffit d'assurer que sa dérivée soit négative. Ceci est vérifié si :
V = SS < 0 (11.7)
I
I
I
1
1
I
1
i
1
I
1
1
1
1
1
1
1
1 1 1Chapitre ll Théorie de la commande par mode de glissement
Remarque
Pour une convergence en temps fini vers la suface de glissement, la condition d'attractivité définie précédemment (les deux conditions de convergence), qui ne garantit qu'une convergence en temps infinie, est remplacée par une condition plus finie, dite condition de 77 attractivité, domer par :
7-sj=-„lsl-%(s)s
h(s)--vS
Ou:
(11.8)
(11.9)
7, y : Constante strictement positive.
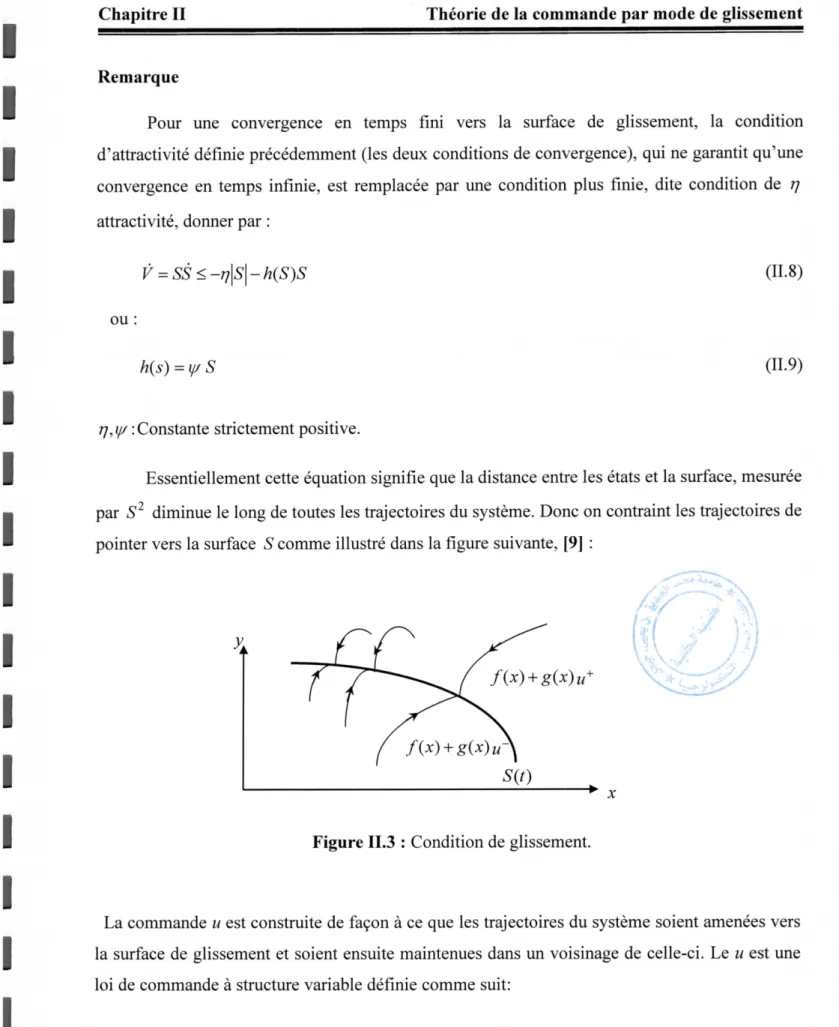
Essentiellement cette équation signifie que la distance entre les états et la surface, mesurée par S2 diminue le long de toutes les trajectoires du système. Donc on contraint les trajectoires de pointer vers la surface S comme illustré dans la figure suivante, [9] :
ËE
Figure 11.3 : Condition de glissement.
La commande a/ est construite de façon à ce que les trajectoires du système soient amenées vers la suface de glissement et soient ensuite maintenues dans un voisinage de celle-ci. Le a/ est une loi de commande à structure variable définie comme suit:
•,-<!::;::::::
si S/x,'' = 0
si S/x,'' < 0
u+±u (11.10)I
I
I
I
I
1
1
1
I
I
I
1
1
1
I
1
1I
1 1I
Chapitre ll Théorie de ]a commande par mode de glissement
c/+ Et 2Æ- étant des fonctions continues. 11 est à noter que c'est le caractère discontinu de
la loi de commande qui permet d'obtenir une convergence en temps fini sur la surface, ainsi que
des propriétés de robustesse vis-à-vis de certaines perturbations, [4].
11.4.2.1.3. Détermination de la loi de commande
Une fois la surface de glissement est déterminée, 1e prochain pas est de concevoir une loi
de commande qui rend la surface de glissement attractive à l'état du système, d'une autre
manière, 1a loi de commande doit être capable de pousser l'état du système vers la surface de glissement.
Si l'état du système reste sur la surfaces,1a stabilité asymptotique de glissement assurera la convergence vers zéro de l'erreur de poursuite.
Dans la théorie de la commande par mode de glissement (commande à structure
variable), il y a différentes manière de choisir les paramètres pour définir une logique de
commutation.
Dans la littérature il y a trois types de structures très répandues, [6], [5] et [1] : - La commande par contre-réaction linéaire à gain commuté.
- Lacommandeparrelais. - Et la commande équivalente.
Les deux demière approches, sont les préférées dans la commande des convertisseurs et les machines par ce qu'elles son plus appropriées.
Pa8e 25
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
11.4.2.1.4. Expression analytique de la commande
Nous intéressons au calcul de la commande équivalente et par la suite au calcul de la commande attractive définie dans 1'espace d'état par 1'équation (11.1),1e vecteur de commande #
est composé par deux grandeurs #eq et #g„ il s'agit de trouvé l'expression analytique de la commande 2Æ(/) .
Le vecteur de commande # pemet de régler la dynamique à deux modes de fonctionnement,
[4]:
<. Permet d'influer sur le mode approche.
•:. Ou bien sur le mode de glissement.
Nous avons :
s.(„=#-gt-,+g(x-eg¢,)+#tg("A„)
(11.11 )11.4.2.1.5. Définition des grandeurs de commande
La structure d'un contrôleur comporte deux parties, un premier concerne la linéarisation
exacte et une deuxième pour la stabilité.
Cette dernière est très importante dans la technique de commande non linéaire, car elle est utilisée pour éliminer les effets d'imprécision du modèle et les perturbations extérieures, [13]. Nous posons :
U--Ueq+Ug|iss
#=_g(x)-[(/(x)+v+kos(x)+Æisz.g#(S))
Notant que la fonction sz.g77 donne le signe de S :
Les coefficients Æ o et Æ ] sont positifs.
Si le gain de commande g(x) est différent de zéro le long de la trajectoire d'état du système, la surface S converge exponentiellement vers zéro.
(11.14)
I
I
I
1
1
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
"eg --g(x ,-10 (x ) + v)
u gi,ss ---g (x r' (k § (x ) + k Ïsign(S ))
(11.16)
#eq : Correspond à la commande équivalente proposer par PÆ/zPov e/ C//Æz.7?, [5]. Cette
commande est considérée comme la commande la plus directe et la plus simple.
Elle est calculée on recomaissant que le comportement du système durant le mode de
glissement est décrite par : S. (x ) = 0 .
La commande équivalente peut être interprétée comme la loi de commande continue qui
permet de maintenir la condition j(x) = 0 dans le cas des dynamiques comues, [6] et [12].
La commande z/g„, est déteminée pour garantir l'attractivité de la variable à contrôler
vers la surface et satisfaire les conditions de convergence, en d'autre terme, elle définit le
comportement dynamique du système durant le mode de convergence.
11.4.2.1.6. Propriétés de robustesse
De nombreuses techniques de commande ont été développées de façon à être robustes vis-à-vis des incertitudes sur les systèmes considérés, la plupart d'entre elles sont basées sur des méthodes adaptatives, reposant aussi bien sur 1'identification ou 1'observation, ou sur des méthodes impliquant la stabilité absolue. Bien souvent, elles conduisent à des lois de commande relativement compliquées dont l'implantation se révèle lourde en matière de calculs et de matériels. D'un autre côté, les modes glissants, et ceci peut expliquer l'intérêt croissant pour ces techniques ces demières armées, permettent d'associer qualités de robustesse et réalisation relativement simple, [4].
Reprenons le système (II.1)que l'on suppose maintenant soumis à des perturbations p
pouvant représenter des incertitudes paramétriques sur le terme nominal de dérivé / ou des
perturbations extemes indépendantes de l'état :
x`n) - f (x) + g(x)u + p x`n) - f (x) + g(x)u + p
(11.17)Le théorème suivant permet d'avoir une description des incertitudes auxquelles le régime
glissant sera insensible et a été donné dans sa forme première par Drazenovic, [9].
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
Théorème 11.1 :
Un régime glissant surs, du système perturbé (11.17), est indépendant du signal de
perturbation p , si et seulement si il vérifie :
p € yec'tg(x))
(11.18)La condition (11.18) est appelée condition de recouvrement ou « matching condition ».
11 faut noter que le système est insensible à de telles perturbations seulement en régime glissant, mais qu'il reste affecté pendant le régime transitoire, avant que la surface de glissement ne soit atteinte.
Preuve: Puisque la condition (11.18) est vérifiée alors il existe une fonctionç telle
que p - g(x)Ç .
La preuve découle simplement de la fonction de projection H qui annule toute Contribution des
vecteurs engendrés par g(x) à la dynamique de la trajectoire en mode glissant.
Nous remarquons ici que, si le régime en mode glissant n'est pas affecté par des
perturbations vérifiant la condition de recouvrement, il n'en reste pas moins que celles-ci agissent toujours lors de la phase d'établissement du mode glissant. La robustesse est alors assurée par l'amplitude de la commande discontinue qui « écrase» les perturbations, si celles ci sont bomées.
11.4.2.1.7. Problème de réticence (chattering)
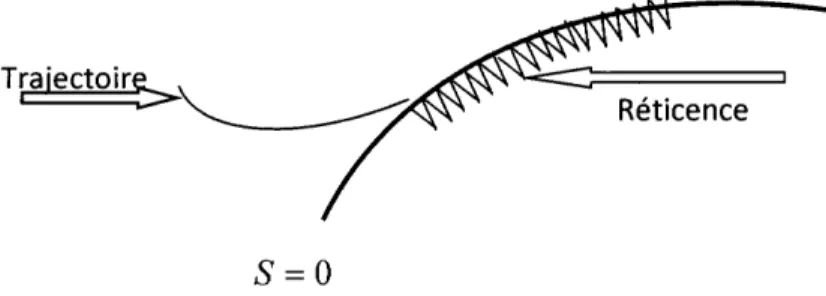
En pratique, la présence de la fonction discontinue s7.g77(S) dans la commande z4 implique que 1'état du système ne peut pas glisser le long de la surface. Mais il oscille le long de la surface de glissement avec la fréquence d'échantillonnage. En générale les réticences ne sont pas un phénomène désiré depuis qu'ils impliquent la haute activité de la commande et qu'ils peuvent exciter des dynamiques de haute fréquence négligées lors de la modélisation [5], [4]
S-_O
Figure 11.5: phénomène de réticence.
I
1
1
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
En effet, ce phénomène a plusieurs effets indésirables sur la qualité de la commande et sur
le système, [10], à savoir : diminution de la précision, produire une grande perte de la qualité des signaux électriques, et provoquer 1'échauffement des systèmes et la fatigue des parties mécaniques mobiles pour les cas des systèmes d'entraînement tels que les machines électriques.
Afin de réduire ces réticences, la fonction §7.g#(S) est remplacée par une fonction
continue de la fome :
Sat(Sl®,-Figure 11.6: Fonction de saturation « sat ».
(11.19)
L'effet de la fonction de saturation est, d'ajouter une couche de limite autour d'une surface
S. la loi de commande poussera encore l'état du système vers la couche de limite. Plus tard, il n'y aura aucun aiguillage violant dans l'action de la commande à l'intérieure da la limite d'où le broutement ne passera pas. Cependant la condition de glissement n'est plus garantie, en plus si l'état du système est loin de l'état de la cible (surface) la commande peut être saturée et le
contrôleur ne peut pas être capable de garder l'état du système sur la surface. Quand la saturation
se passe, la surface glissante n'est plus garantie pour être attirante, [3].
Pour quelques systèmes, la saturation peut affecter considérablement les perfomances et
pour remédier ce problème de la saturation, il peut être évité en utilisant une autre solution au problème de réticence.
I
I
I
1
1
1
1
I
1
1
1
I
I
I
1
1
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
Cette solution est la commande par mode de glissement dynamique. Autres, la saturation peut même causer l'instabilité.
Une autre solution pour lisser la commande au voisinage de la surface de
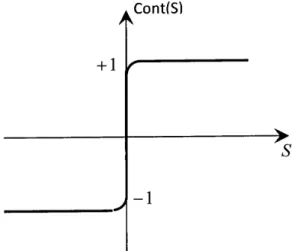
glissements = 0 , est de remplacée dans la bande |S(/)| < 0 , la fonction discontinue s7.g# (S) par une fonction continue [3].
Cont(S)--Avec : Ô > 0
Cette fonction de commutation peut se représentée par la figure suivante :
Figure 11.7 : Fonction d'adoucissement « cont ».
(11.20)
11.4.2.2. Commande par mode glissant dynamique
Dans le but de réduire les oscillations, nous allons présenter une solution qui repose sur la variation de la commande u de façon à diminuer ou éliminer l'effet de la fonctiomz.g7?(S) , origine du CÆc7//erz.#g. Les étapes d'élaboration de la commande par mode glissant dynamique sont les mêmes que dans le cas statique, [3].
11.4.2.2.1. Surface de glissement
Le chois de la surface de glissement est identique a celui de la commande statique, [7] et [16], de l'équation correspondante, on à :
I
1
1
I
I
1
1
1
I
1
1
I
I
1
1
1
1
1
I
I
I
Chapitre ll Théorie de la commande par mode de g]issement
s(x"-(f+À)`„''-o
S(x,/)=e("[)+C¥(„])e(" + ... +C¥|e=o
(11.21)
À : Constante strictement positive
11.4.2.2.2. Loi de commande
Dans cette section on veut élaborer une loi de commande par mode de glissement sans
chattering. Si les incertitudes sont connues, les objectifs de la commande peuvent être atteints en choisissant, pour le système (11.21) la loi de commande idéale suivante :
2/ * = -g (x )-] Œ (x ) + v + A + ÆS )
Preuve :
En prenant une fonction de £};c7pz/#oi; de la fome :
y-ls2
2 Alors :V -_ s S
Du fait que :S -f +v + A+ gu
L'expression de V devient : y -SΠ+v +A+g2/)Substituant 1'expression de la commande zt(/) , dans (11.26) On trouve :
V---ks2
(11.22) (11.23) (11.24) (11.25) (11.26) Pa8e 311
1
I
1
1
I
1
1
1
1
1
1
1 1 1I
1 1 1 1Chapitre ll Théorie de la commande par mode de g]issement
Dans le but de rendre y négatif, il suffit que le coefficient Æ vérifier : Æ > 0
Ce qui implique que S + 0 quand / + œ et ce fait #* pemet d'atteindre les objectifs de commande.
Par la suite on note :
„o = _g (x )-` Œ (x ) +v + ÆS )
La commande idéale peut s'écrire sous la fome suivante :
u*--uo-A,
(11.27)
(11.28)
#o : représente une commande nominale dans le cas ou les incertitudes son nulles.
Du fait que les incertitudes sont mal connues,1'implantation de la loi de commande idéale 2Æ* est impossible pour cela, notre but est d'approcher la partie qui contient des incertitudes dans la commande idéale eÆ* par un autre teme noté#s . Dans ce cas, la nouvelle commande
prend la fome :
u -- u o + u s
(11.29)Avec :
#o : Commande nominale du système sans incertitudes.
c/s : Partie de la commande à calculer de telle sorte que la commande 2/ converge vers la surface
de commande2Æ* .
Le problème posé consiste à développer une procédure systématique de synthèse de la
commande #s de façons à compenser l'effet de A] . Pour se faire, on définit une surface de
glissement convenable S„ , par :
Su-u-u*
(11.30)I
1
1
1
I
1
1
1
1
1
1
1 1 1 1 1 1 1 1 1 1Chapitre ll Théorie de la commande par mode de glissement
De 1'équation (11.28) et (11.29) , (11.30) , l'équation (11.30) devient :
Su--us+A\
Pour cette surface, on définie la fonction de £yczp##ov y(S„) candidate suivante :
y(s+is2"
Sa dérivée temporelle est donner par :
V(Su)=SuSu
La dérivée de (JJ.31) peut s'écrire sous la fome :
S" -2;s + Al
Avec A[ est supposée bomer par :
ÀIl s Ô(¥,",
(11.31)
(11.32)
(11.33)
(11.34)
Ou Ô(x, #) est une fonction positive donnée.
On principe, chaque terme en fonction de z/* est difficile à êtres utiliser dans la commande, c'est pourquoi, on est obliger de chercher pour S„ une nouvelle fomulation indépendante de 2/* , si
on ajoute et on retranche gz4* dans (11.25) on aura :
S =f + gu +v + A+ gu* -gu* S =f + g(u -u*)+v + A+ g
S---ks+gsu
S+ks[-àŒ+-A+Æ„]
(11.35) (11.36) Pa8e 331
1
I
1 1 1 1 1 11
1
I
11
1
1
I
1
1
I
Chapitre ll Théorie de la commande par mode de glissement
D,où :
sign(Su) = sign (11.37)
Remarque 11.2 :
Le calcule de l'amplitude de la commande # n'est possible sauf si le gain g(x) est non nul sur toute la trajectoire de x .
Remarque 11.3 :
Dans ce cas,1'effet de la fonction fz.g# est réduit après intégration de c/s , car 1'intégration se comporte comme un filtre passe bas.
11.4.3. Système multi variable (MIMO)
Cette section présente l'extension du développement antérieur aux systèmes multi
variables, considérons un système non linéaire multi variables de la fome :
* = F(x) + G(x)e{ + A(x) Avec : F(r) = [/i(X) ,... /m(X)] G(x)= [G„(x)], avec i=1 ... m j=1 ... m Z-kl ... Zm] w -[" ,... "m] lAi(x,lsAi et (11.38) (11.39) (11.40)
Le vecteur d'état x est composé de x, et leur premier dérivée sont exprimés à 1'aide de la notation (7z,. -1) , on peut alors écrire le système sous la forme suivante, [10] :
X,("=Z(X)+Az(x)+£b,,(x)#„i=1...metj=1...m /'=1
Nous nous intéressons toujours au problème de poursuite d'une trajectoire désirée x = xd .
(11.41)
I
I
I
I
I
I
I
I
I
I
I
1
1
1
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
11.4.3.1. Commande par mode de glissement statique 11.4.3.1.1. Surface de glissement
Soit : e, (/), i = 1 „ ..., m , l'erreur de poursuite est donnée par :
ei -xi -xd,
Soit un vecteur S de composante S,. donné par :
s,("-(f+4)`„-''.e,
S,(x,/)=e,("J-])+e,,(„,_])e,("J -2)e,("J-[) + ... +Œue, =0, 4 >0, J.=1 ,... m
(11.42)
11.4.3.1.2. Condition de convergence
Comme dans le cas mono variable on cherche une loi de commande zj vérifiant la condition de glissement suivante :
y = lsrs > o
2
v-_sTs=Ë\s,S,<-o
(11.43)
Remarque 11.4:
Pour assuré une attractivité dans un temps fini on définie la condition de convergence de la manière suivante :
7=£S,j,S-£(7,|S,|+Æ,(S)S,)
J'= 1 7'=1 hj(S)--VjsïANec..rij,vij>0,.i--1...,m Où: (11.44) 11.4.3.1.3. Loi de commandeConsidérons la surface S = [Sï ... Sm]r définie par l'équation (11.42) et soit la loi
de commande #(/) :
1
1
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
1
Chapitre ll Théorie de la commande par mode de glissement
#=-G(x)-[[F(x)+y+ÆoS+ÆiJz.g#(S)] (11.45)
Où:
JZ.8#(S)=[JJ.8#(Si)...SZ.8#(Sm)]
y-[y,...ym]r
Si la matrice G(x) est réversible, la surface S est globalement attractive et invariante, [12].
Preuve :
Soit la fonction de £};czpz47?ov définie par :
y=lsrs
2
Où:
S=[Si...Sm]r
Sa dérivée temporelle est donc :
V -_ s T S
(11.46)
(11.47)
De plus, la dynamique j,. est explicitée de la relation de la surface de glissement (11.42) ce qui conduit à : +Œ,'„,-1eJ`"+...+C¥J,1e, -x£:J)+Œ„]e,("'-[)+...+Œ,,]e, Prenons y,--x!;,,+Œ„leJ`„,-1'+...+ŒJ'1é,y, (11.48) Pa8e 36
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
Donc : (11.48) devient :
s, -x:i +vl
j, =Z(X)+y,(x)+A,(x)+£b,,(x)#, pourz.=1 ... m
/=1
En remplacent x,("'.) par son expression obtenue de (11.41) , la relation précédente, ou encore sous la forme matricielle, devienne:
S = F(x) + V(x) + A(x) + G(x)#
En choisissant la loi de commande domée par 1'expression(II.45) , c-à-d :
#=G(x)-ï[F(x)+y(x)+ÆoS+kïsz.g#(S)]
La dynamique de la surface exprimée par (11.52) se réduit à :
S = A(x) -kos -kisign(S)
11.4.3.2. Commande par mode de glissement dynamique
11.4.3.2.1. Surface de glissement
Considérons la surface S = [S[ ... Sm]r décrite par :
s,("-(f+4)`„1'€(x,-o
S,¢,/)=e,("J -])+e„„,_L)e,("J -2)+ ... +Œ„e, =0, À, >0, 7. =1 ,..., m (11.52)
(11.53)
(11.54)
(11.55)
11.4.3.2.2. Loi de commande
Si les incertitudes A(x) dans (11.38) sont comus la loi de commande idéale suivant
assurera les objectifs de commande
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I I IChapitre ll Théorie de la commande par mode de glissement
# * = Û (x )-[ [F(x ) +V + A(x ) + ks ] Avec : "*-[",*
s=[sl
* ...u '„ ...S „'Æ - diag[ki ... km], Æ,>O Pour z.=1 ... m
y-[y,...ymF
Preuve :
Considérons la fonction de £ycrpz/#ov candidate suivante :
y-isrs
Sa dérivée temporelle est exprimée par :
V -_ s T S
En utilisant la relation (11.52) , la dérivée temporelle de S est alors donner par :
S = F(x ) +y (x ) + A(x ) +G (x )2/ (11.56) (11.57) (11.58) (11.59) Avec :
Si la commande # prend la valeur de #* , formulée par la relation (11.56) , la dynamique se
réduit alors à la fome :
S = -ks
En introduisant (JJ.60) dans (JJ.58) , celle-ci prend l'expression finale :
(11.60)
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
V = -ksT s
' (11.61)
Ce implique que S, + 0 quant t + oo par conséquence e, et toutes ses dérivées jusqu'à l'ordre # tendent vers zéro. On peut écrire cette loi de commande dans une forme réduite comme suit :
#,._i Convergent vers zéro.
u*--uo-A,
"o -[„ol ... „om r
Ai = [Aii ... AimT Où: Avec :
{Z°i=G--Ç(-;;Z)([xî(X")+ÆS]
(11.62) (11.63)zÆo : représente la commande nominale (glissement) dans le cas ou les incertitudes sont nulles. La réalisation de cette loi de commande est impossible car les incertitudes sont mal
comues, pour cette raison, on doit approcher la partie qui contient ces incertitudes par une
commande %s , ce qui implique une nouvelle forme de la commande, soit :
u-uo+us Avec :
t
„-["l..."mr "S=["S1...#sm]r (11.64) Pa8e 391
I
1
1
I
1
1
I
1
1
I
1
1
I
I
1
1
I
I
I
I
Chapitre ll Théorie de la commande par mode de glissement
Le problème posé consiste à développer une procédure systématique de synthèse de la commande #s de façon à compenser les effets de A,. , pour se faire, [10], on définit une surface de glissement convenable S„ , telle que :
Su-u-u*
De (11.65) et (11.64), l'expression (11.62) devient : s" - [s„ ... s" ]r
Su = Us + Ai
Pour cette surface, on définie la fonction de £yczp#77ov y(S„) candidate suivante :
y(s",-is„rs"
Sa dérivée temporelle est donnée par :
v.(s„,-is"7j"
La dérivée de (11.66) peut être écrite sous la forme :
S" = 2;s + A1
Avec :
À[ est supposée bomer par :
|Ài,.|SÔz(X,w), i=1 ... m Ô(x,%)=[Ô]...Ôm]retô,desfonctionspositiventdomées. Où: (11.65) (11.66) (11.67) (11.68) (11.69) (11.70) Pa8e 40
1
1
1
I
1
1
1
I
1
1
I
1
1
1
1
1
1
1
1
I
I
Chapitre ll Théorie de la commande par mode de glissement
11.5. Conclusion
Dans ce chapitre, nous avons présenté et développé la stratégie de la commande par mode
de glissement statique et dynamique pour une classe des systèmes non linéaires mono variable et multi variables.
Les deux approches sont caractérisées par la simplicité de mise en œuvre qui se fait dans trois étapes :
• Choix d'une surface convenable.
• Etablissement des conditions de convergence.
• Détemination de loi commande qui assure l'attractivité de la surface.
Dans la stratégie de commande par mode de glissement statique, la présence de la fonction « signe » dans la loi de commande cause des oscillations haute fréquences appelées « réticences » pour remédier ce problème et réduire les oscillations, dans la seconde et la troisième approche ; 1e problème de réticence est résolu, par la modification de la loi de commande de telle sorte que la fonction discontinue « signe » intervient dans la loi de
commande à travers une fonction intégrale qui se comporte comme un filtre passe bas.
Dans le troisième chapitre, nous allons essayer d'appliquer la commande par mode de glissement sur notre système électrique, qui est une machine asynchrone, la charge est considérée comme perturbation sur le modèle .