HD28 .M414
Ki'i^-B}
^<^%. »«s,,TsS;;--NOV
12
1987 «PrWORKING
PAPER
ALFRED
P.SLOAN SCHOOL
OF
MANAGEMENT
DETERMINISTIC CHAOS
INMODELS
OFHUMAN BEHAVIOR:
METHODOLOGICAL ISSUES AND EXPERIMENTAL RESULTS
JOHN
D.STERMAN
OCTOBER
1987WP 1945-87
MASSACHUSETTS
INSTITUTE
OF
TECHNOLOGY
50
MEMORIAL
DRIVE
CAMBRIDGE,
MASSACHUSETTS
02139
r
'^
DETERMINISTIC CHAOS
INMODELS
OFHUMAN BEHAVIOR:
METHODOLOGICAL ISSUES AND EXPERIMENTAL RESULTS
JOHN
D.STERMAN
D-3921
Deterministic
Chaos
inModels
of
Human
Behavior:
Methodological
Issues
and
Experimental
Results
John D.
Sterman
Associate Professor Sloan School ofManagement
Massachusetts Institute of
Technology
Cambridge,
MA
02139
Forthcoming
in theSpecial Issue
on
Instabilitiesand
Chaos
System
Dynamics
Review
D-3921
ABSTRACT
Recent
work
hasshown
that severalwell-known models
in the systemdynamics
literature contain previously unsuspected regimes ofdeterministic chaos.
Two
of themost
extensively analyzed are Sterman's
model
of theeconomic
longwave
and
theproduction-distribution
model
of theBeer
DistributionGame.
The
significance of these theoreticaldevelopments hinges
on
whether the chaotic regimes lie in the realistic region of parameterspace. Further there are
major
questions regarding the descriptive accuracy ofmodels
ofhuman
systemswhich
exhibit chaos. Data limitations and the inability to conduct controlledexperiments
mean
empirical studies at the aggregate level are not likely to resolve thesequestions.
An
alternative approach is basedon
laboratory experiments inwhich models
provide a simulated environmentfor the study of
human
decisionmaking behavior. Recentlylaboratory experiments have been conducted to analyze decisionmaking behavior in the long
wave
model
and theBeer
DistributionGame.
This paper describes the experiments andshows
that the behavior ofthe subjects is explained well with a simple heuristic long used insystem
dynamics modeling
and wellgrounded
in behavioral decision theory.The
parameters ofthe proposed decision rule are estimated econometrically for each subject.The
parameterswhich
characterize a significant minority of the subjects areshown
to produce chaos. Thisdirect experimental evidence thatchaos can be
produced by
the decisionmaking behavior ofrealpeople has important implications for the formulation, analysis,
and
testing ofmodels
ofD-3921
Recent
work
hasshown
that severalwell-known models
in the systemdynamics
literature contain previously unsuspected regimes of deterministic chaos.
The
work
ofDay
(1982a, 1982b) provides an earlyexample
of chaotic behavior ineconomic
models, whileMosekilde
and others (1987) have developed corporatemodels which
exhibit chaos.Two
ofthe
most
extensively analyzed suchmodels
are Sterman'smodel
oftheeconomic
longwave
(Sterman 1985, 1986,
Rasmussen,
Mosekilde,and Sterman
1985) and theproduction-distribution system or
Beer
DistributionGame
(Forrester 1961, Jarmain 1963,Sterman
1984,Mosekilde and
Larsen, this issue).While
the demonstration that chaos can beendogenously
produced
in these systems is an important theoretical development, the significance of theresults hinges in large
measure
on whether the chaotic regimes lie in the realistic region ofparameter space or
whether
they are mathematical curiosities never observed in the realsystem. Further there are
major
questions regarding the descriptive accuracy of the decisionrules postulated in the
models
ofhuman
systems developed to datewhich
contain strangeattractors.
The
practical significance of chaosand
otherphenomena
such as self-organizationin policy-oriented
modeling
remains unclear until it can be determined that thesephenomena
can occur inmodels
whose
decision rules aregrounded
in empirical study ofthe actualdecision processes of the agents. It is difficult if not impossible to resolve such issues
by
appeal to the aggregate empirical data. In the case of the long wave, for example, there
have
been at
most
fivelong-wave
cycles since the industrial revolution, toofew
for statisticallyreliable results.
Worse,
the data required are simply unavailable, andmuch
ofit is corruptedby
measurement
error (Chen, this issue).An
alternative approach is basedon
laboratory experiments inwhich models
provide asimulated
environment
for the study ofhuman
decisionmaking (Sterman 1987a). Recently,the long
wave
model and Beer
DistributionGame
(traditionally used as a teaching rather(Sterman 1987b, 1987c).
These
experimentswere
conducted primarily to study the heuristicswith
which
peoplemanage
acomplex dynamic
environment. In both experiments the decisiontask ofthe subject
was
tomanage
a stock in the face oflosses, delays in acquiringnew
units,multiple feedbacks
and
other environmental disturbances.This paper describes the experiments
and
shows
that decisionmaking behavior in thetwo
experiments is significantly suboptimal.The
departuresfrom
optimal behavior aresystematic, suggesting subjects use
common
heuristics for stockmanagment.
The
experiments
show
that the behavior of the subjects can bemodeled
well with a simplestock-management
heuristic long used in systemdynamics modeling and
wellgrounded
inbehavioral decision theory.
The
parameters of the proposed heuristic are estimatedeconometrically for each subject.
The
systems are then simulated with the estimated parameters.The
parameterswhich
characterize a significant minority of the subjects areshown
to produce chaos. This direct experimental evidence thatchaos can beproduced by
the decisionmaking behavior ofreal people has important implications for the formulation,
analysis, and testing of
models
ofhuman
behavior.The
Stock
Management
Problem
The
regulation ofa stock or system state is one of themost
common
dynamic
decisionmaking tasks.
The
manager
seeks to maintain a quantity at a target level, or at leastwithin an acceptable range. Stocks cannot be controlled directly but rather are influenced by
altering the stock's inflow
and
outflow rates. Typically amanager must
set the inflow rate soas to
compensate
for lossesfrom
the stock and to counteract environmental disturbanceswhich
may
push
the stockaway
from
its desired value. Frequently there are lagsbetween
the initiation ofa control action and its effect
on
the stock, and/or lagsbetween
a change inthe stock and the perception ofthat change
by
the decisionmaker.The
duration of these lagsmay
vary andmay
be influenced by the manager'sown
actions.D-3921
Stock
management
problems occur atmany
levels ofaggregationfrom
the micro to themacro.
At
the level ofa firm,managers
must
order partsand
raw
materials so as to maintaininventories sufficient for production to proceed at the desired rate, yet prevent costly
inventories
from
piling up.They must
adjust for variations in the usage and wastage of thesematerials
and
for changes in theirdelivery delays.At
the level ofthe individual, peopleregulate the temperature ofthe water in their
morning
shower, guide their carsdown
thehighway, and
manage
their checking account balances.At
themacroeconomic
level, theFederal Reserve seeks to
manage
the stock ofmoney
so as to provide sufficient credit foreconomic growth
while avoiding inflation and compensating for variations in creditdemand.
The
generic stockmanagement
controlproblem
may
be divided intotwo
parts: (i) thestock and flow structure ofthe system;
and
(ii) the decision rule usedby
themanager
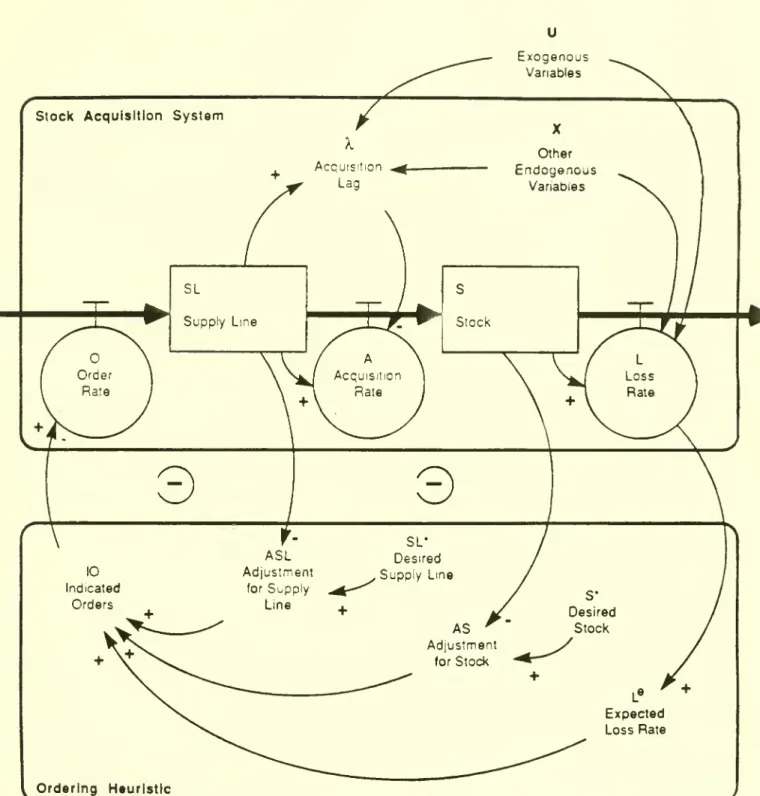
(figure1). Considering first the stock and flow structure, the stock of interest S is the accumulation
ofthe acquisition rate
A
less the loss rate L:Si=
I(A,-L^)dx+S,
' 'K
^ (1)Losses
from
the stockmust depend on
the stock itself,and
may
alsodepend on
otherendogenous
variablesX
andexogenous
variables U:Lt
=
fL(St,Xt,Ut). (2)The
acquisition rate willdepend on
the supply lineSL
ofunitswhich
have been ordered butnot yet received, and the average acquisition lag X. In general,
X may
be a function of thesupply line itself
and
the otherendogenous
andexogenous
variables:At
=fA(SLat).
(3)The
supply line is simply the accumulation ofthe orderswhich have
been placedO
less thosewhich have
been delivered:SL,=
I(O,-
A,)dx+SL,
The
structure represented by figure 1 and eq. (1-4) is quite general. There isno
presumptionthat the functions governing losses
and
the acquisition lag are linear. Theremay
bearbitrarily
complex
feedbacksamong
theendogenous
variables,and
the systemmay
beinfluenced by
numerous exogenous
forces including noise and nonstationarity oftheunderlyingequilibrium.
Consistent with the behavioral foundations of system
dynamics modeling
(Morecroft1983, 1985,
Sterman
1987a), behavioral decision theory (Hogarth 1987,Tversky
andKahneman
1974), and the theory ofbounded
rationality(Simon
1979, Cyert andMarch
1963),the proposed decision rule utilizes information locally available to the decisionmaker and does
not
presume
themanager
has globalknowledge
of the structure of the system.The
genericdecision rule recognizes three motives for ordering
which
any stockmanagement
heuristicmust
include:Order
enough
to (1) replace expected lossesfrom
the stock, (2) reduce thediscrepancy
between
the desiredand
actual stock,and
(3) maintain an adequate.supply line ofunfilled orders.
1.
Replacement
oflosses.The
replacement motive is straightforward. In equilibrium,when
the desiredand
actual stock are equal, themanager must
continue to orderenough
toreplace
ongoing
losses. Lossesmay
arisefrom
usage (e.g. shipmentsfrom
an inventory offinished goods) or decay (e.g. the depreciation of plant
and
equipment). Failure to replacelosses
would
cause the stock to fallbelow
the desired level, creating steady-state error.2. Stock adjustment. Errors in forecasting losses or changes in the desired stock
demand
amechanism
to adjust ordersabove
orbelow
replacement. Orders to reduce thediscrepancy
between
thedesired and actual stockform
a negative feedback loopwhich
regulates the stock
(shown
in thebottom
part of figure 1).Any
rulewhich
fails tocompensate
for discrepanciesbetween
the desired and actual stock fails to control the stockD-3921
the desired value ifdisplaced.
The
stockwould
follow arandom
walk
as the system isbombarded
by shocks.3. Supply line adjustment. Delays
between
the initiation and impact ofcontrol actionsgive stock
management
systems significant inertiaand
should be accounted forby managers
to ensure a stable response to shocks. Failure to account for the supply line results in
overcorrection and instability. Consider cooking dinner on an electric range. Ifone turns the
heat
down
just as thepotcomes
to a boil the supply line ofheat in the coils of the range willcontinue to heatthe pot, boiling it overand ruining dinner.
The
following equations formalize the ordering heuristicproposed
above. First, ordersin
most
real life situationsmust
be nonnegative,Ot
=MAX(0,IOt)
(5)where
10
is the indicated order rate, the rate indicated by other pressures. ^The
indicated order rate is basedon
the anchoringand
adjustment heuristic (Tverskyand
Kahneman
1974).Anchoring and
adjustmentis acommon
judgmental strategy inwhich
an
unknown
quantity is estimated by first recalling aknown
reference point (the anchor)and
then adjusting for the effects of other factors
which
may
be less salient orwhose
effects areobscure.
Anchoring and
adjustment has beenshown
to apply to awide
variety ofdecisionmaking tasks
(Einhom
and Hogarth
1985, Davis,Hoch,
and Ragsdale 1986,Johnson
and
Schkade
1987,Lopes
1981, Hines 1987,Sterman 1987dX
Here
the anchor is theexpected loss rate L^. Adjustments are then
made
in response to discrepanciesbetween
thedesired and actual stock
AS
andbetween
the desired and actual supply lineASL:
lOt = L^t +
ASt
+ ASLt. (6)The
expected loss ratemay
beformed
in various ways.Common
assumptions inequilibrium value), regressive expectations L^t= yLt-l + (l-Y)L*, 0<y<l, adaptive
expectations
L«t=
6Lt-i+
(l-6)L^t-l,0<9<1, and
extrapolative expectations, AL^t =lcoi*ALt-i,
where
A
is the first-difference operatorand
coi>0.The
adjustment for the stockAS
creates the chiefnegative feedback loopwhich
regulates the stock.
The
proposed
heuristicassumes
for simplicity that the adjustment islinear in the discrepancy
between
the desired stockS*
and the actual stock:ASt
=
as(S*t-St)
(7)where
the stock adjustment parameteras
is the fraction ofthe discrepancy ordered eachperiod.
The
adjustment for the supply line is formulated analogously asASLt
=
asL(SL*t-
SLt) (8)where
SL*
is the desired supply lineand asL
is the fractional adjustment rate for the supplyline.
The
desired supply line in general isnot constant butdepends
on
the desired throughputO*
and the expected lagbetween
ordering and acquisition of goods:SL*t =
Xh*0*t.
(9)The
adjustment for the supply line creates a second negative feedback loopwhich
avoids overorderingand
alsocompensates
for changes in the acquisition lag X. IfX
rises, forexample,
ASL
induces sufficient additional orders to restoreA=0*.
There
are a varier>' ofpossible representations for X^ and
O*,
rangingfrom
constants through sophisticatedforecasts.
Experiment
I:The
Economic
Long
Wave
The
experimental protocol for the longwave
model
is described inSterman
andMeadows
1985 andSterman
1987a, 1987b).The
methodological foundations of experimentaleconomics
are discussed in the seminalwork
of Smith (1982) and Plott (1986).The model
D-3921
hypothesis behind the long
wave
can be stated intwo
parts. First,due
to construction lags,the process by
which
individual firms adjust production capacity todemand
is inherentlyoscillatory. In isolation an individual firm
would
producedamped
fluctuations with aperiod ofabout 15-25 years in response to a shock. Second, in the aggregate the capital-producing
sector of the
economy
orders and acquires capitalfrom
itself. This multiplier effect or'self-ordering' creates a positive feedback loop
which
destabilizes the oscillatory tendencies ofindividual firms, changing the
damped
oscillation to a limit cycle with a40-60
yearperiod.Simulation
and
formal analysis confirm thedynamic
hypothesis (Sterman 1985;Rasmussen,
Mosekilde
andSterman
1985).As
the self-ordering loopbecomes
stronger,damping
dropsrapidly.
The
system goes through aHopf
bifurcation and produces a limit cycle. Furtherincreases in the strength of self-ordering proceed through period doublings and ultimately to
chaos.
In the experiment the
model
is transformed into agame
inwhich
subjectsmanage
thecapital-producing sector of a simple
economy.
Subjectsmust
balance the supply ofand
demand
for capitalby
adjusting their production capacity tomeet
desired production. Ordersfor capital arise
from
theexogenous
consumer goods
sector andfrom
the subject'sown
orders.
The
equations underlying thegame
reflect a simplifiedform
ofthe originalmodel
butpreserve its essential structure
and
dynamics. In thegame
decisions aremade
in discretetime intervals representing
two
years, and themodel
becomes
a third-order differenceequation system.
The
equations ofthegame
are given below. ProductionPR
is the lesser ofdesiredproduction
DP
orProduction Capacity PC. Capacity is proportional to the capital stock.The
capital/output ratiok
isone
period (two years):PRt
=
MIN(DPt,PCt)
(10)The
capital stock ofthe capital sector isaugmented by
acquisitionsAK
and diminished bydepreciation
CD.
Depreciation is proportional to the stock.The
average lifetime ofthecapital stock x is 10 periods (20 years):
Kt+i
= Kt + (AKt-CDt)
(12)CDt
=
Kt/t. (13)The
acquisition ofcapital by both the capital andgoods
sectors(AK
and
AG)
dependson
thesupply line ofunfilled orders each has accumulated (the backlogs
BK
andBG)
and
the fractionof
demand
satisfiedFDS.
Each
period both the capitaland goods
sectors acquire the fullsupply line of unfilled orders unless the capital sector is unable to produce the required
amount. In this case acquisition
by
each sector is reduced in proportion to the shortfall.The
acquisition lag
X
is thus 1/FDS,and
AK+AG=PR
at all times, ensuring that output isconserved:
AKt
=
BKt*FDSt
(14)AGt
=
BGt*FDSt
(15)FDSt
= PRt/DPt
(16)DPt
=
BGt
+
BKt. (17)The
supply lines of unfilled orders foreach sectorBG
and
BK
areaugmented
by orders forcapital placed by each sector
and
emptiedwhen
those orders are delivered:BKt+i
=
BKt
+(OKt
-AKt)
(18)BGt+i
=BGt
+ (OGt-AGt).
(19)New
orders placedby
thegoods
sector are theexogenous
input to the system towhich
thesubject ofthe experiment
must
respondby
choosing an appropriateamount
ofcapital to orderfor their
own
use:OGi
= exogenous
(20)OKt
=
determinedby
subject. (21)D-3921
9of the subjects in
making
these decisions is to minimize their total score for the trial.The
score is defined as the average absolute deviation
between
desired productionDP
and production capacityPC
over theT
periods of the experiment:T
S
=
(1/T)S
I
DPt
-
PCt
|. (22)t=0
The
score indicateshow
well subjects balancedemand
and supply. Subjects are penalized equally for both excessdemand
and
excess supply.The
experiment isimplemented on
IBM
PC-type
microcomputers.A
'gameboard' isdisplayed
on
the screen providing subjects with perfect information. Color graphics andanimation highlight the flows oforders, production, and shipments to increase the
transparency ofthe structure.
The
conversion ofthe originalmodel
to aform
suitable forexperimental testing is described in
Sterman
1987a.The
subject population(N=49)
consisted ofMIT
undergraduate, master's and doctoral students inmanagement
and
engineering,many
with extensive exposure toeconomics
andcontro^ theory; scientists and economists
from
various institutions in theUS,
Europe, and theSoviet Union; and business executives experienced in capital investment decisions including
several
company
presidents andCEOs.
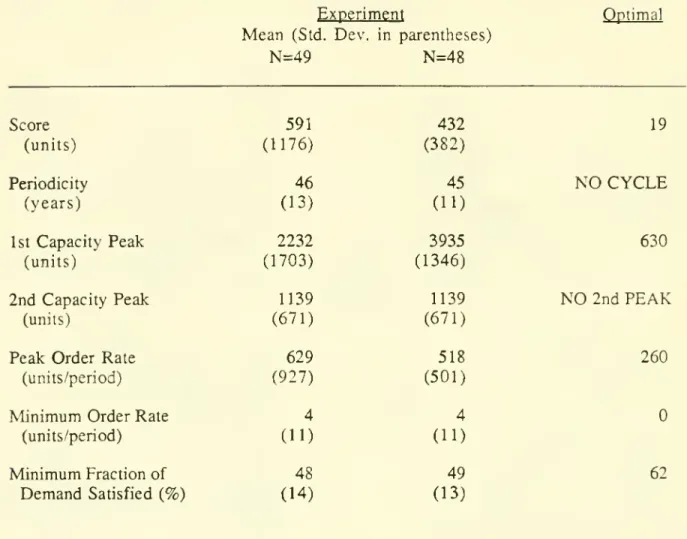
Typical experimental results are
shown
in figure 3. All trials begin in equilibrium. Inperiod 3 there is a one-time step inputof
10%
in the orders ofthegoods
sector.The
optimalresponsereturns the system toequilibrium within 6 periods, producing a score of 19. In
contrast the vast majority ofsubjects
produced
significant oscillations (table 1).The
averagescore for the
sample
was
591; the lowestwas
77.Next
theproposed
stockmanagement
heuristic (equations 5-9)was
tested againstthe ordering behavior of the subjects. Adapting the heuristic to the experimental context is
proportional to desired production.
The
loss rateL
is simply the depreciation ofthe capitalstock
CD. The
desired supply lineDSL
was
specified according to equation 9, with theexpected acquisition lag X^
=X=
1/FDS
and desired throughput0*=
CD.
Allowing
anadditive disturbance term E, the proposed ordering rule for capital investment
becomes:
OKt
=MAX(0,CDt
+ASt +
ASLt
+ Et) (23)ASt
=
as(DKt-Kt)
(24)ASLt
=
asUDSLt
-BGt)
(25)DSLt
=
?.e*CDt=
(l/FDSt)*CDt.'
(26)
To
test the rule only thetwo
adjustment parametersas
andasL
need
be estimated. All otherdata required to determine orders are presented directly to the subjects.
Maximum
likelihood estimates of the parameters for each trialwere
found by grid search of the parameter space,subject to the constraints as,
asL
^0.Assuming
the errors £ are independent, identical, andnormally distributed then the
maximum
likelihood estimates of such nonlinear functions aregiven
by
the parameterswhich minimize
thesum
of squared errors.Such
estimates areconsistent
and
asymptotically efficient, and the usual measures of significance such as thet-test are asymptotically valid.
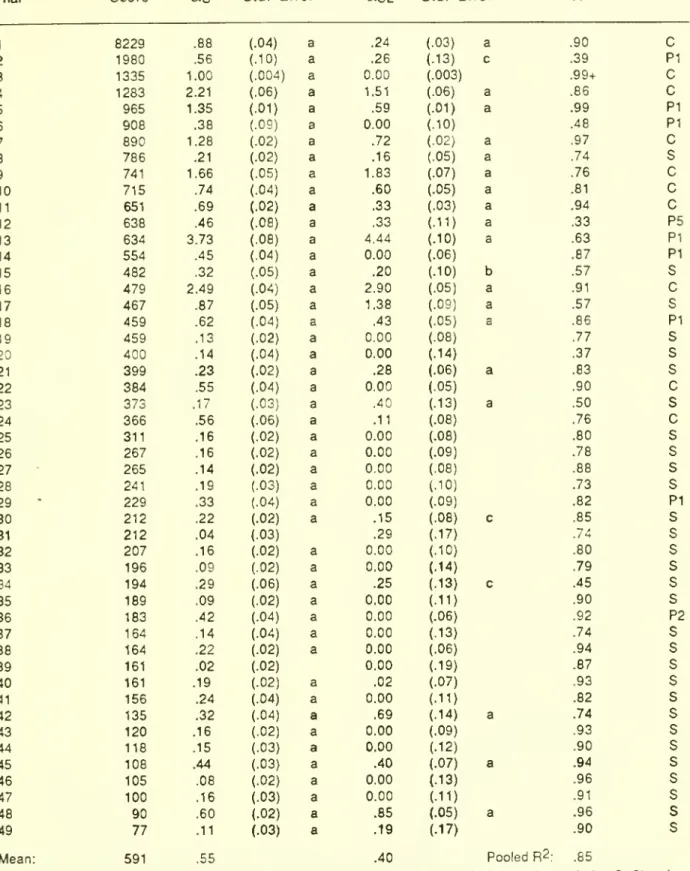
Estimates for
49
trials together with t-statistics are given in table 2.The
model'sability to explain the ordering decisions ofthe subjects is excellent.
R2
variesbetween
33%
and99+%,
with an overallR^
for the pooledsample
of85%.2
All buttwo
ofthe estimatedcapital stock adjustment parameters are highly significant.
The
supply line adjustmentparameter is significant in 22 trials.
Sterman 1987b
analyzes the estimation results and identifies several 'misperceptionsof feedback'
which
are responsible for the subjects'poor performance.One
ofthese is theD-3921
11continue ordering even after the construction pipeline contains sufficient units to correct any
stock discrepancy.
The
present concern, however, is the relationshipbetween
the estimatedparameters and the regimes of behavior in the model.
The
estimated parameters characterizethe decision
making
behavior of actual people.When
simulated in themodel
are theestimated decisoin rules ofthe subjects inherently stable, or
do
theyproduce
limit cycles,period multiples, or chaos?
Table 2 also indicates the
mode
of behavior produced by simulation ofthe decision rulewith the estimated parameters.
The
parameters estimated for thirty subjects(61%)
arestable.
Most
of these produceoverdamped
behavior of the capital stock in response to thestep input.
Seven
parameter sets produce limit cycles of period 1, and 2 produce periodmultiples.
The
parameterswhich
characterize ten subjects(20%)
produce chaos. Inspectionof table 2
shows
that the subjectswhose
parameters are stableperformed
best in the taskwhile those
whose
parameters produce limit cycles and chaos generallyhad
the highest scores.Figure 4
shows
the phase portrait for several of themore
interesting parameter sets.Note
the period 5 cycleproduced
by (as, asL)=
(.46, .33).The
apparent period 2 cycleproduced
by (.42, 0) is,upon
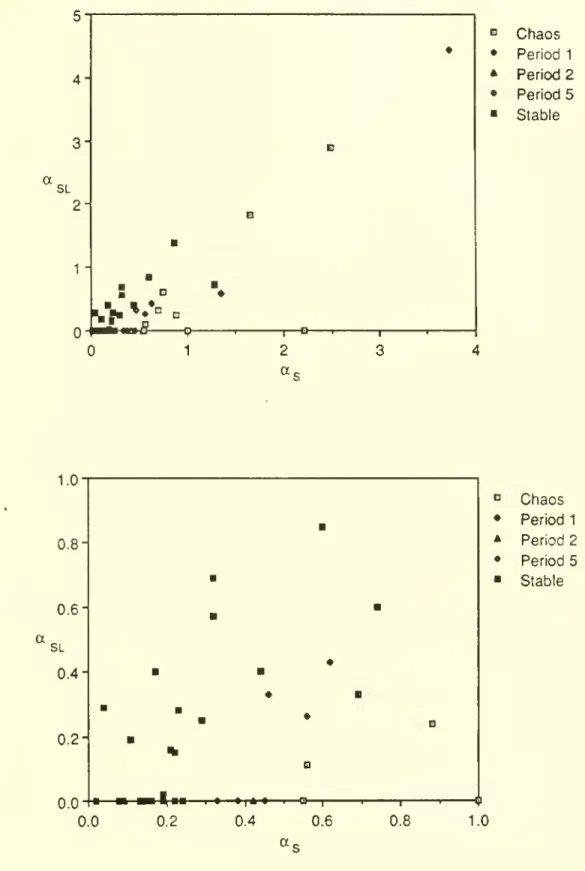
closer inspection, seen tobe chaotic.Figure 5 locates the
modes
of behavior in parameter space. Consistent with bothintuition
and
formal stability analysis, stability isenhanced
by small values ofas
and largevalues of asL.
More
aggressive attempts to correct the discrepancybetween
the desired andactual capital stock are destabilizing: by ordering
more
aggressively the self-ordering loopcauses a larger increase in total
demand,
thus exacerbating disequilibrium and encouragingstill larger orders in future periods. Conversely,
more
aggressive response to the supply lineThus
the periodic and chaotic attractors tend to occur for large values ofas
and smallvalues ofasL- Yet the route to chaos is apparently
more
complex. Consider the route tochaos as
as
increases for asL=0. Stability givesway
to periodone
limit cycles, then to period2 at (.42, 0), and ultimately to chaos for
as
^.55.Yet
the parameterswhich
produce theslightly chaotic period 2 are surrounded
on
the rayasL
=
by parameterswhich
produceperiod 1 limitcycles. Similarly, the period 5 attractor
produced
by the parameters (.46, .33)lies
between
the region ofstability and the region ofperiod 1 behavior.The
resultsshow
that the parameterswhich
characterize actual decisionmakingperformance in a
common
and importantmacroeconomic
situation canproduce awide
range of behavior, including chaos.Experiment
II:The
Production-DistributionSystem
The
"Beer DistributionGame"
is a role-playing simulation ofan industrial productionand
distribution system developed atMIT
to introduce students ofmanagement
to theconcepts of
economic dynamics and computer
simulation. In use forneariy three decades, thegame
has been played all over the worid by thousands of people rangingfrom
high schoolstudentsto chief executive officers
and government
officials.The
game
is playedon
a boardwhich
portrays in a simplified fashion the productionand
distribution of beer (figure 6). Orders for and cases of beer are representedby
markersand
pennieswhich
are physically manipulatedby
the players as thegame
proceeds.Each
brewery
consists of four sectors: retailer, wholesaler, distributor,and
factory (R,W,
D, F).One
personmanages
each sector.Customer
demand
is representedon
adeck
of cards.Customers
demand
beerfrom
the retailer,who
ships the beer requested out of inventory.The
retailer in turn orders beer
from
the wholesaler,who
ships the beer requested out oftheD-3921
13distributor,
who
in turn orders and receives beerfrom
the factor^'.The
factory produces thebeer.
At
each stage there are shipping delays and order receiving delays.These
representthe time required to receive, process, ship, and deliver orders, and as will be seen play a
crucial role in the dynamics.
The
subjects' objective is tominimize
cumulativeteam
costs over the length ofthegame.
Inventory holding costs for each sector are $.50 per case perweek,
and stockout costs(costs for having a backlog of unfilled orders) are $1.00 per case perweek.
The
decision task of each subject is a clearexample
ofthe stockmanagement
problem. Subjects
must keep
their inventory aslow
as possible while avoiding backlogs andsatisfying customer
demand.
Inventory cannot be controlled directly butmust
be ordered.The
lag in receiving beer is potentially variable: ifthe wholesaler has beer sufficient to coverthe retailer's orders the retailer will receive the beer desired afterthree weeks.
But
if thewholesaler has run out, the retailer
must
wait until the wholesaler can receive additional beerfrom
the distributor.Only
the factory, theprimary producer, faces a constant delay inacquiring inventory (there is
no
limit to the production capacity ofthe factory).The
protocol forthe experiment is described inSterman
1987c.The
game
is initializedin equilibrium.
Each
inventory contains 12 cases.Customer
demand
is initially four cases perweek.
To
disturb the system customerdemand
increases to eight cases perweek
inweek
5and
remains at that level thereafter.The
results reported herewere
drawn from
fourdozen
games
(192 subjects) collectedover a period offouryears.
A
computer model
ofthegame
was
used to test the records forconsistency. Trials in
which
therewere
accounting errors ofmore
than afew
cases perweek
for
more
than afew weeks
in any of the four sectorswere
discardedfrom
further analysis.Eleven
games
were
retained, providing44
subjects.^That sample
consists ofundergraduate,MBA,
and
Ph.D. students atMIT's
Sloan School ofManagement,
executivesfrom
a variety offirms participating in short courses on
computer
simulation,and
senior executives of amajor
computer
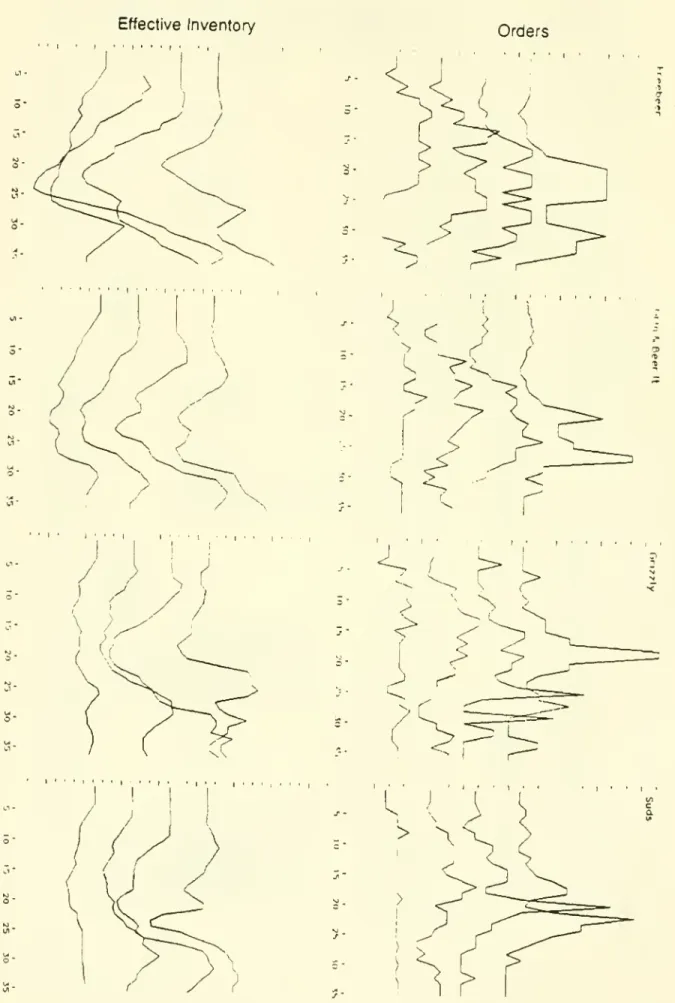
firm.Typical experimental results are
shown
in figure 7and summarized
in table 3.The
results
show
the behavior of the subjects to be farfrom
optimal.The
averageteam
cost isten times greater than optimal. Like the
macroeconomic
experiment, the results exhibitseveral strong regularities.
1. Oscillation:
The
trials are allcharacterizedby
instability and oscillation.The
pattern oforders and ofinventory is
dominated
by a large amplitudefluctuation with anaverage period of 21 weeks.
2. Amplification:
The
amplitude and variance of orders increases steadily as onemoves
from
customerto retailer to factory.The
peak
order rate at the factory level ison
averagemore
than double thepeak
order rate generated at the retail level.Customer
orders increasefrom
4 to 8 cases perweek.By
the time the disturbance has propagated to thefactor)', the order rate averages a
peak
of32 cases.3.
Phase
lag:The
peak
order rate tends to occur later asone
moves
from
the retailerto the factory.
The
phase lag is not surprising since the disturbance in customer ordersmust
propagate through decisionmaking and order delays
from
retailer to wholesaler and so on.Next
the proposed decision rulemust
be adapted to the particular situation in the beergame
and
cast in aform
suitable for estimation ofthe parameters.The
stockS
correspondsto the inventory of the subject
and
the supply lineSL
to thesum
of orders in the mail delays,the backlog ofthe subject's supplier (ifany), and the beer in the shipping delays.
The
lossrate is the rate at
which
each subject receives orders.To
test the rule it is necessary tospecify expected losses L^, the desired stock S*, and the desired supply line SL*.
Expected
lossesfrom
the stock are the rate atwhich
each subject expects theirD-3921
15the factory's forecast of the distributor's order rate, etc. Adaptive expectations are
postulated. Adaptive expectations are widely used in simulation
modeling
of corporateand
economic
systems, they are often agood model
of the evolution of expectations in theaggregate (Sterman 1987d, Frankel
and
Froot 1987),and
they areone
of the simplestformulations for expectations flexible
enough
to adapt to a nonstationary process.Because
the subjects lack the information and time to determine optimal inventory orsupply line levels
the desired stock
S* and
desired supply lineSL*
are bothassumed
to be constantswhich
must
be estimated.The
generic decision rule ofeq. (5-9) thus becomes:Ot
=
MAX(0,IOt)
(27)IOt=Let
+ ASt +
ASLt
(28)Let
=
eLt-l + (l-e)Lei.i.0<e<l
(29)ASt
=as(S*
- St) (30)ASLt
=asL(SL*
- SLt). (31)Defining P
=
asUct-s and S'= S* +
PSL*
yieldslOt
=Let
+
as(S'-St-pSLt).
(32)Note
that since S*, SL*,asL
and
as
are all >0, S'>0. Further, it is unlikely that subjects willplace
more
emphasison
the supply line thanon
the inventor)' itself: the supply line does notdirectly enter the cost function nor is it as salient as inventory. Therefore it is probable that
asLS
as,meaning
0<(3<1.Thus
(3 can be interpreted as the fraction of the supply line takeninto account
by
the subjects. IfP =
1, then the subjects fully recognize the supply line anddo
notdouble order. If P
=
0, then orders placed are forgotten until they arrive, encouragingoverordering
and
instabilitj.'^implemented
in the beergame
contains four parameters to be estimated (6, as, S', and p).The
parameterswere
estimated by thesame
procedure used in the longwave
experiment.An
additive disturbance term is assumed, and the disturbances areassumed
to be i.i.d.normal. Estimates for each sectorofeach trial
were
foundby
grid search of the parameterspace subject to the constraints
0<6<1
and
as, S', p >0.5The
estimated parameters are displayed in table 4.The
mean
R2
is71%;
R^
is lessthan
50%
foronly 6 of44
subjects.^A
large majority of the estimated parameters aresignificant.
As
in thelongwave
experiment the decision rule is an excellentmodel
of thedecisionmaking behavior ofthe subjects.
Sterman
1987c relates the estimated parameters tothe dysfunctional performance in the task. It is noteworthy that the
same
misperceptions offeedback structure
which
cause oscillation in themacroeconomic
experiment are responsiblefor thepoorperformance ofthe subjects in the beergame. Specifically, the supply line of
unfilled orders is given far too little weight by
most
subjects.Next
the beergame
was
simulated using the stock adjustment rule with theestimated parameters.
Each
trial involves four subjects, each ofwhom
could have differentparameters. In the simulations, however, the
same
parameterswere
assumed
for eachsector, vastly simplifying the analysis.*^
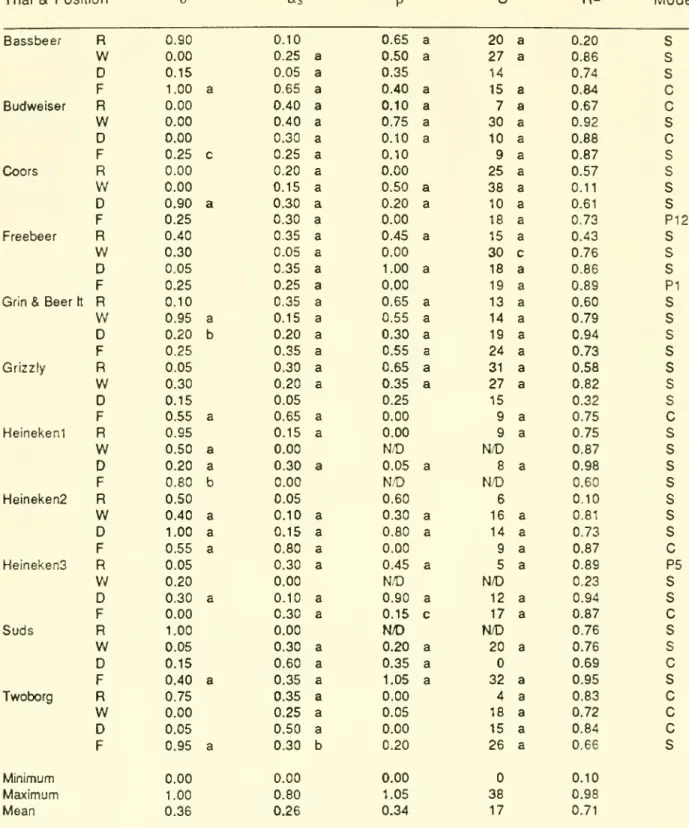
Table 4 indicates the
mode
of behaviorproduced by
each set ofparameters.Thirty-one parameter sets
(70%)
produce stable behavior.One
each produces limit cycles ofperiod1, period 5, and period 12.
Ten
yield chaos. Since the beergame
is a 19th order system thebehavior
produced
by the system is exceedinglycomplex
and there aremany
possibleprojections of phase space. Figure 8
shows
several of themore
interesting phase portraits.D-3921
17parameters of the Bassbeer Factory (9, as, P, S' = 1, .65, .40, 15)
compared
to those of theHeinekenS
Factory (9, as, P, S'=
0, .3, .15, 17).The
parameters estimated for theCoors
Factory (9, as, p, S' = .25, .3, 0, 18) reveal a cycle ofperiod 12
when
distributorinventory isplotted against factory inventory.
The
retail sector ofthesame
team, however, produces alimit cycleofperiod 1.
The
difference inmode
is probably due to the integer constrainton
orders.
Figure 9
shows
the distribution ofthemodes
in parameter space.The
relationshipsbetween
the adjustment parametersand
stability are similar to those apparent in themacroeconomic
experiment,and
for similar reasons. In general, larger values ofas
andsmaller values of P are destabilizing. That is, to the extent the subjects ignore the supply
line of unfilled orders (P=0) a stock discrepancy will cause orders to be placed each period
even after sufficient orders are in the supply line, leading to excess inventories and
oscillation.
Such
overordering is exacerbated bymore
aggressive stock adjustment(as>>0)
since
more
will be ordered in response to a given discrepancybetween
the desiredand
actualstock. Figure 9 also indicates that in general the smaller the desired inventory S' the less
stable the system. Again, intuition readily explains
why
this is so. Consider the response ofthe retailer to an unanticipated increase in customer
demand.
Retail inventory fallsdue
to thelags in receiving beer.
The
retailer will place additional orders with the wholesaler throughthe stock adjustment term. Ifthe wholesaler has adequate inventory to fill
incoming
orders(S'»0)
incoming
orders can all be filled and the retailer's acquisition lag remains constant.If, however, the wholesaler runs out ofinventory the retailer finds orders placed fail to arrive.
The
delay in receiving beer lengthens, the retailer's stock drops still further,and
stillmore
orders swell the supply line in a vain attempt to replenish inventory.
When
sufficient beer(figure 7). S' plays such a crucial role in determining the stability of the system because it
determines
how
close the system operates to the fundamental nonlinear contraint thatshipments can only be
made
if inventor)' exists. Small values ofS'make
itmore
likely thesystem will run out ofinventory thus entering the unstableregion in
which
the acquisition lagX
is longand
variable.Those
subjectswho
maintained larger target inventory levelswere
thus
more
stableon
average than thosewho
attempted to cut costsby
reducing their bufferstock.
There
appears to beno
simple relationshipbetween
the parameter 6and
themodes
ofthe system. 6 controls the speed with
which
the adaptive forecast ofincoming
orders isadjusted and has
two
opposing effectson
stability. Faster adjustment of thedemand
forecast(9=1) increases the gain
between
orders placed andincoming
orders.Shocks
are transmittedup
the distribution chainmore
readily, destabilizing the systemby
causing larger inventoryexcursions upstream in response to a given
change
in ordersdownstream.
On
the other hand, sluggish adjustment (0=0)means
variations inincoming
orders are not quicklycountered by the replacement term ofthe ordering rule, causing inventory to decline further
than it
would
ifreplacement ofincoming
orderswas
swift.As
a result, inventoriesmay
beexhausted,
moving
the system into the less stable zone inwhich
backlogs buildup
and theacquisition lag lengthens.
As
in themacroeconomic
experiment the resultsshow
an unexpectedly rich array ofbehavior is generated
by
the interaction ofthe decision processes ofreal people with thefeedback structure of the environment.
Discussion
The
discovery of nonlinearphenomena
such as deterministic chaos in the physicalworld naturally motivates the search for similarbehavior in the world of
human
behavior. YetD-3921
19not to the
same
degree. Aggregate data sufficient for strong empirical tests simplydo
notexist for
many
of themost
important social systems. Social systems are not easily isolatedfrom
the environment.The huge
temporal and spatial scales ofthese systems, vastnumber
ofindividual actors, considerations ofcost
and
ethical concernsmake
controlled experimentson
the systems themselves difficult at best. Finally, the laws ofhuman
behavior are not asstable as the laws of physics.
The
social scientist is thus left withtwo main
options in the quest to understand therelevance ofnonlinear
phenomena
in thedomain
ofhuman
behavior.Formal models
of socialsystems
may
be constructed and analyzed. Previouswork
ofthis type has demonstrated theexistence of chaotic
modes
in awide
array of social andeconomic
models.However,
analysisofthese
models
frequentlyshowed
that the chaotic regime lay far outside the plausible regionofparameter space.
Worse,
without empirical tests ofthe decision rules the verisimilitude ofthe
models
was open
to doubt. In the absence of empirical data the relevance of nonlinearphenomena
remained
questionable.The
second
approach is to develop laboratory experiments with simulated socialsystems. Since experiments
on
actual firmsand
nationaleconomies
are infeasible, simulationmodels
of these systemsmust
be used to explore the decisionmaking heuristics ofrealpeople.
Such
experiments create 'microworlds' inwhich
the subjects face physical andinstitutional structures, information, and incentives
which
mimic
(albeit in a simplifiedfashion) those of the real world.
The
experiments described here presented subjects with a straightforwardstock-adjustment task. Results
show
that the subjects' behavior can bemodeled
with a highdegree of accuracy by a decision rulelong used in system
dynamics
models.The
decision ruleis consistent with a vast
body
of empiricalknowledge
developed in behavioral decisionbe robust: the feedback structure, information available, loss function, time available, "cover
story"
and
many
other dimensions of the experimental environment differed markedly.Performance in both settings
was
decidedly suboptimal.The same
misperceptions of thefeedback structure of the
system
are apparent in both cases.The
experiments reported here demonstrate that chaos can in fact beproduced
by thedecisionmaking processes of real people.
The
results are significant in several respects.The
demonstration that chaos can beproduced by
the decisionmaking heuristics people actuallyuse strengthens the
argument
for the universality of thesephenomena.
Chaos
thus appearsto be a
common
mode
of behaviornot only in physical systems butin socialand economic
systems as well.These
resultsdo
notshow
that, say, the evolution ofGNP
in the UnitedStates has in fact been chaotic. Further empirical
work
is required before such questions canbe settled.
But
the results suggest modelers can ignore nonlineardynamics
only at theirperil.
Models
ofeconomic and
socialdynamics
should portray the processesby which
disequilibrium conditions are created
and
dissipated, notassume
that theeconomy
is in ornear equilibrium at all times or that adjustment processes are stable.
Models
should beformulated so that they are robust in extreme conditions, since it is the nonlinearities
necessarily introduced by robust formulations that crucially determine the
modes
of thesystem.
These
principleshave
long been central to systemdynamics
(Forrester 1961,Forrester and
Senge
1980, Richardsonand
Pugh
1981)and
behavioraleconomics
(Da)' 1984) and are important even for systemswhich
do
not contain limitcycles or strange attractors(Sterman 1985b).
At
thesame
time anumber
ofquestions regarding the practical significance ofchaos and other nonlinearphenomena
in social systemmodeling
remain unresolved. Real socialsystems are
bombarded
bybroadband
noise, and it is wellknown
that suchrandom
shocksD-3921
21the existence of stochastic shocks
swamp
the uncertainty in trajectories caused by chaos?How
does the existence of chaotic regimes in amodel
influence its response to policies, andthe predictability of that response? Particularly troubling here is the apparent nonuniformity
of the distribution of
modes
in parameter space.Mosekilde and
Larsen's (this issue) carpetbombing
experiments with the simulated beergame show
that there are islands of chaos inparameter space,
and
that theboundary between
the periodicand
chaotic solutions is fractal,a finding consistent with analysis of such classic systems as Buffing's equation
(Thompson
and Stewart 1986).
The
response of stability to parameter variationsmay
not bemonotonic
or
even
predictable in such systems, raisingmajor
questions for policy analysis.The
dev-elopment
ofprinciples forpolicy design in such systems is amajor
area for future research.Similarly, chaos is a steady-state
phenomenon
which
manifests over very long timeframes, but
many
policy-orientedmodels
are concerned with transientdynamics
and nearlyall with time horizons
much
shorter than those used in the analysis ofchaoticdynamics
(e.g.Mosekilde
et al. 1986, Weidlich et al. this issue).Over
such extended time horizons theparameters ofthe system cannot be considered static but will themselves evolve with
learning
and
evolutionary pressures.How
does learning influence chaotic systems?The
macroeconomic and
corporate experiments described here, forexample,show
the behavior ofsystems simulated for thousands of years and weeks, respectively.
The
parameters of thedecision functions remain constant throughout.
Yet
there is evidence (Sterman 1987b,Bakken
1987) that subjects begin to learn withinjust afew
cycles, modifying the parametersoftheir ordering function. In the
macroeconomic
experiment, at least, learningmoves
thesubjects
away
from
the chaotic region intothe region ofstability.The
practical significance ofchaos and other nonlinear
phenomena
in policy-orientedmodels
of social andeconomic
behavior remains clouded while these questions are unanswered.human
behavior to experimental test.Many
models
ofhuman
systemsmay
be builtwhich
produce an astounding variety ofbehaviors. Unfortunatelymany
ofthesemodels
areformulated without regard to the vast
body
of empiricalknowledge documenting
the decisionprocesses ofindividuals.
For
example, rational expectationsmodels
ineconomics presume
agents have perfect
knowledge
ofand
the cognitivecapability to solve the system ofequations
which
characterize theeconomy
(Lucas 1976,Shaw
1984).These
assumptions arestrongly contradicted by evidence atall levels of aggregation
(Simon
1984,Hogarth
and
Reder
1986) andform
a poorfoundation fordescriptivemodels
ofeconomic
dynamics.Similarly, physical scientists frequentiy specify decision processes in
models
ofhuman
behavior
by
analogy with natural systems (Beylich 1986,Zeeman
1977,Zimmerman
1986), or simply assert that the processes studied in natural systems extendby
analogy to socialdynamics
(Ruelle 1984,May
1976).The
natural sciences can indeed be a fruitful source ofmetaphor
for theories ofhuman
behavior,and
there is encouraging progress in the applicationof nonlinear science to social systems (e.g. Prigogine and Sanglier, 1987).
But
without a firmempirical grounding in tiiepsychology ofchoice behavioral scientists will continue to
view
such
models
as ad hocand
continue to question their relevance. It has been difficult toassess the validity of such
models
because theassumed
decision ruleswere
not subject toempirical test. In the future experimental tests of
models
ofhuman
behavior shouldbecome
as accepted and
commonplace
as they are in the natural sciences.Over
time the application of thesemethods
should identify the processes ofjudgment
people actually use indynamic
decisionmaking tasks
and which
are acceptable as the basis foraccuratemodeling
ofhuman
affairs.
Models
formulatedon
the basis ofknowledge
of individual decisionmaking, analyzedwith the tools of simulation
and
modem
nonlinear science,and
subjected to experimental testoffer the best
hope
toimprove
our understanding ofthedynamics
and evolution ofsocialD-3921
23
Notes
1.
Order
cancellations aresometimes
possible andmay
exceednew
orders in extremeconditions (e.g. the U.S. nuclear
power
industry in the 1970s). Since cancellations arelikely to be subject to different costs and administrative procedures than
new
ordersthey should be represented separately as a distinct outflow
from
the supply line ofunfilled orders rather than as negative orders.
2.
Note
that the function OK=f(-) does not contain an estimated regression constant.Thus
the correspondence of the estimated and actual capital orders, notjust their variation
around
mean
values, provides an importantmeasure
of the model's explanatory power.Since the residuals e
need
not satisfy Zet=
the conventionalR^
is not appropriate.The
alternativeR2
= 1 - Set^ /lOKt^
is used (Judge et al. 1980). ThisR2
can beinterpreted as the fraction of the variation in capital orders around zero explained by the
model.
3. Analysis
showed
a slight tendency for the trials with themost
extreme amplitude andhighest costs to be
most
prone to accounting errors.Thus
the finalsample
of eleventrials is biased slightly towards those
who
understood andperformed
best in thegame.
The
effect is modest, however,and
reinforces the conclusionsdrawn below
regardingmisperceptions of the feedback structure
by
the subjects.4. In the experiment and in the simulations orders are restricted to the positive integers.
5.
The
parameters 6, as, p,and
S'were
estimated to the nearest .1, .05, .05, and 1 units,respectively.
The
searchwas
carried out over a sufficiently large range to ensure6.
Note
that S' functionsmuch
like a regression constant in eq. 32.However
thenonlinearity
Ot>0 means
the residuals will not, in general, satisfy Let = (estimatedand actual orders
need
not have acommon
mean).The
conventionalR^
is not thereforean appropriate
measure
of goodness offit.The
alternativeR^
=
r^is used,where
r isthe coefficient ofcorrelation
between
estimated and actual orders (Judge et al. 1980).7. Subjects
were
assigned positions randomly,and one-way
ANOVA
of the estimatedparameters
showed
no
strong relationshipbetween
the values of the estimatedparameters
and
the position one plays in thegame
(with the exception ofas
which
was
significant at the
4.3%
level).N.B.
The
longwave
game
runson
anyIBM
PC
orcompatible computer; disks are availablefrom
the author.The
estimation and simulations for both experimentswere
carried outon
Macintosh
computers using theTrueBASIC
language.The
dataand
computer
programs
are availablefrom
the authorupon
request.To
avoid transients, the phaseplots
shown
in figure4 were
generatedby
simulateing themodel
for 10,000 periods anddiscarding the first 9000. Similarly, the phase plots
shown
in figure 8were
simulated for1500 weeks.
The
first500 were
discarded for all except the Bassbeer factory, forwhich
D-3921
25References
Bakken, B. 1987. Learning
System
Structureby
ExploringComputer
Games,
unpublishedmanuscript,
System
Dynamics
Group, Sloan School ofManagement,
MIT,
Cambridge
MA
02139.Beylich, A. 1986.
On
the Modelling of VehicularTraffic Flow. In C. Kilmister (ed.)Disequilibrium
and
Self-Organization. Dordrecht: D. Reidel.Cyert, R.
and
J.March.
1963.A
BehavioralTheory
ofthe Firm.Englewood
Cliffs N.J.:Prentice Hall.
Davis, H. L., S. J.
Hoch, and
E. K. Easton Ragsdale. 1986.An
Anchoring and Adjustment
Model
of Spousal Predictions. Journal ofConsumer
Research. 13:25-37.Day,
R. 1984. DisequilibriumEconomic
Dynamics:
A
Post-Schumpeterian Contribution.Journal of
Economic
Behavior
and
Organization. 5, 57-76.Day,
R. 1982a. IrregularGrowth
Cycles.American
Ecoru>micReview. 72, 406-414.Day,
R. 1982b.Complex
BehaviorinSystem
Dynamics
Models.Dynamica.
8, 82-89.Einhom,
H. J., andR.M.
Hogarth. 1985.Ambiguity
and
Uncertainty in Probabalistic Inference.Psychological Review. 92:433-461.
Forrester, J.
W.
1961. IndustrialDynamics.
Cambridge,
MA:
MIT
Press.Forrester, J.
W.
and
P.M.
Senge. 1980. Tests for Building Confidence inSystem
Dynamics
Models.
TIMS
Studies in theManagement
Sciences. 14:201-228.Frankel, J. A.
and
K. A. Froot. 1987.Using
SurveyData
to Test Standard PropositionsRegarding
Exchange
Rate ExpectationsAmerican
Economic
Review
77:133-153.Hines, J.
1986
A
BehavioralTheory
of Interest Rate Formation.Working
paperWP-
1771-86,Sloan School of
Management,
MIT.
Hogarth, R.
M.
andM. W.
Reder
(eds). 1986.The
Behavioral Foundations ofEconomic
Theory
Journal ofBusiness. 59:S181-S505.Jarmain,
W.
E. (ed.) 1963.Problems
inIndustrialDynamics.
Cambridge,
MA: MIT
Press.Johnson, E. J. and D. A. Schkade. 1987. Heuristics and Bias in Utility Assessment.
Unpublished
manuscript,Wharton
School, University ofPennsylvania, Philadelphia.Judge et al. 1980.
The Theory
and
Practiceof Econometrics.New
York: Wiley.Lopes, L. L. 1981.
Averaging
Rules and Adjustment Processes:The
Role
ofAveraging
inInference. Report 13,
Wisconsin
Human
Information Processing Program, University ofWisconsin,
Madison.
Lucas, R.E. 1976. Econometric Policy Evaluation:
A
Critique. In K.Brunner
and
A. Meltzer(eds).
The
PhillipsCurve
and Labor
Markets.Supplement
to the Journal ofMonetary
Economics.May,
R.M.
1976. Simple MathematicalModels
withVery Complicated Dynamics.
Nature. 261(5560):459-467.Morecroft, J. 1983.
System Dynamics:
PortrayingBounded
Rationalit>'.Omega.
11:131-142. Morecroft, J. 1985. Rationality in the Analysis of Behavioral Simulation Models.Management
Science 31:900-916.
Mosekilde, E., D.
Rasmussen,
H. Jensen, J. Sturis, and J. Jespersen. 1987. Chaotic Behaviorin a Generic
Management
Model. European
Journal of Operations Research. Forthcoming. Mosekilde, E. and E. Larsen. 1987. Chaotic Behavior in the Beer DistributionGame.
System
Dynamics
Review. 4(1).Nicolis, G.
and
I. Prigogine. 1977. Self-Organization in Nonequilibrium Systems.New
York:Wiley.
D-3921
27
Institutions. Science.
232
(9May),
732-738.Prigogine, I. and
M.
Sanglier (eds.) 1987.Laws
ofNature
and
Human
Conduct. Brussels:Task
Force of Research Information and Studyon
Science.Rasmussen,
S., E. Mosekilde, and J. D. Sterman. 1985. Bifurcationsand
Chaotic Behavior ina
Simple
Model
oftheEconomic
Long
Wave.
SystemDynamics
Review. 1(1):92-1 10.Richardson, G.P.and A.L. Pugh. 1981. Introduction to System
Dynamic
Modeling
withDYNAMO.
Cambridge
MA:
The
MIT
Press.Ruelle, D. 1984. Strange Attractors. In P. Cvitanovic (ed.)Universality in Chaos. Bristol:
Adam
Hilger, Ltd.Shaw,
G.K. 1984. Rational Expectations.New
York: St. Martins Press.Simon,
H. A. 1979. RationalDecisionmaking
in Business Organizations.American
Economic
Revie^^. 69:493-513.
Simon.,H. A. 1984.
The
Behavioral and Rational Foundations ofEconomic
Dynamics.
Journalof
Economic
Behavior
and
Organization. 5:35-55.Smith, V. 1982.
Microeconomic Systems
as an Experimental Science.American
Economic
Review.
72, 923-955.Sterman, J. D. 1984. Instructions for
Running
theBeer
DistributionGame.
System
Dynamics
Group
working
paperD-3679,
Sloan School ofManagement,
MIT.
Sterman,J. D. 1985a.
A
BehavioralModel
oftheEconomic
Long Wave.
Journal ofEconomic
Behavior
and
Organization. 6:17-53.Sterman, J. D. 1985b.
A
Skeptic'sGuide
toComputer
Models.Working
PaperD-3665,
System
Dynamics
Group, Sloan Scholl ofManagement,
MIT,
Cambridge
MA
02139. Sterman, J. D. 1986.The Economic Long Wave:
Theory
and Evidence. SystemDynamics
Sterman, J. D. 1987a. Testing Behavioral Simulation
Models
by DirectExperiment.Management
Science. 33(12).Sterman, J. D. 1987b. Misperceptions of
Feedback
inDynamic
Decisionmaking.Working
paperWP-
1899-87. Sloan School ofManagement,
MIT,
Cambridge
MA.
Sterman, J. D. 1987c. Managerial Behaviorin
Dynamic
Decisionmaking: FurtherMisperceptions of Feedback.
System
Dynamics
Group
working
paperD-3919,
Sloan School ofManagement,
MIT.
Sterman, J. D. 1987d. Expectation
Formation
in Behavioral Simulation Models. BehavioralScience. 32:190-211.
Sterman, J. D. and D. L.
Meadows.
1985.STRATEGEM-2:
A
Microcomputer
SimulationGame
ofthe Kondratiev Cycle. Simulationand
Games.
16:174-202.Thompson,
J.and
H. Stewart. 1986.NonlinearDynamics
and
Chaos.New
York: Wiley. Tversky, A.and
D.Kahneman
1974.Judgment
Under
Uncertainty: Heuristicsand
Biases.Science . 185 (27 September): 1124-1131.
Zeeman,
E. C. 1977. Catastrophe Theory: SelectedPapers, 1972-1977. Reading,MA:
AddisionWesley
Publishing Co.Zimmerman,
R. 1986.The
Transitionfrom
Town
to City: Metropolitan Behaviorin the 19th Century. In C. Kilmister (ed.). Disequilibriumand
Self-Organization. Dordrecht: D. Reidel.D-3921 29
Figure 1.
The
generic stock-management system.u
ExogenousVariables
Stock Acquisition System
Expected
Loss Rate
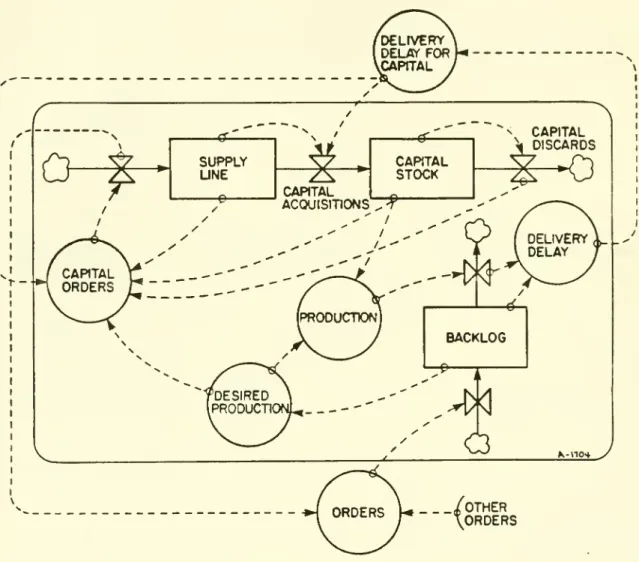
Figure 2.
The
stockmanagement
system applied to aggregate capital investment.The model
portrays a firm
which
produces capital plant and equipment.The
demand
for the firm's productis exogenous, as is the delivery delay for acquiring
new
capital stock.When
the self-orderingmultiplier is introduced, the firm's
own
orders for capital add to theexogenous demand,
andthe delivery delay for capital
becomes
the firm'sown
delivery delay.SUPPLY
UNE
CAPITAL ACQUISITIONSCARTAL
STOCK N CAPITAL ^ DISCARDSo
/S^
( DELIVERYL
ill
DELAY 7 fpRooucnoNj\
J
BACKLOG
K-not _-/OTHER
\ORDERS
D-3921
31Figure 3. Typicalresultsofthe macroeconoinic experiment.
4
iitKaMaMMMMMa
D-3921
35Trial
Table 2.
Macroeconomic
experiment: Estimated parameters.Score
as
Std. Error*asL
Std. Error* R2 Mode1200n
1000-Gome18
600
100
Figure 4. Simulation ofthedecisionrule with estimated parameters.
eoo Proaucllon Capacity 1200 HOOn 1200 1000 600 Game36 800 Production CapecUij
*
1200 eoo 750 c TOO o o a. ^ 600 •> o 550 500 150 Game 12 500 600 700 Production Capacity eoo 880 1230 1250 Production Capacity 1270 1200-1 Game 10 100 800 ProductionCapacity 1200D-3921
35
a
Figure 5.
Modes
ofthe system inparameterspace.Lower
graphzooms
into areabetween (0,1).D-3921
37Figure7. T^'picalexperimentalresults oftheBeerdistribution
Game.
7a:
Customer
Orders. Inweek
5customerordersrisefrom
4 to 8 cases perweek.Compare
against the oscillations inthe subjects'orders(7c).30-25 - ro15 -'J -5
-Figure7b.
Key
toexperimental results (figure 7c).a
Factory ^ Distributor
_ Wholesaler
Retailer
Orders placed bysector.
Frombottom totop,
R. W.D,F,eachoffsetby15cases/week. Major tick-marks=l5 cases/week. Minortick-marks=5 cases.'week
Initialorders=4cases/weekinallsectors.
5 10 U 20 25 30 :5 Weeks o c 01 > c o o Factory Distnbutor Wholesaler Retailer
Effective Inventoryby seaor.
Effective lnventory=lnventory-Backlog.
Frombottomtotop,
R, W.D, F,eachoffset by40cases. Maior tick-marks=40cases. Minor tick-marks=lOcases.
Initial inventorysl2casesin allsectors.
3 10 13 20 23 30 33