Scaffolding a Skeleton
Texte intégral
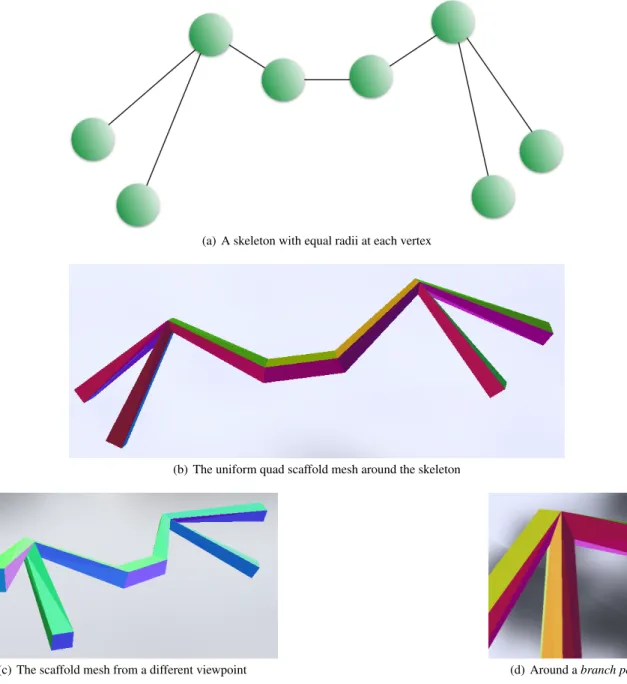
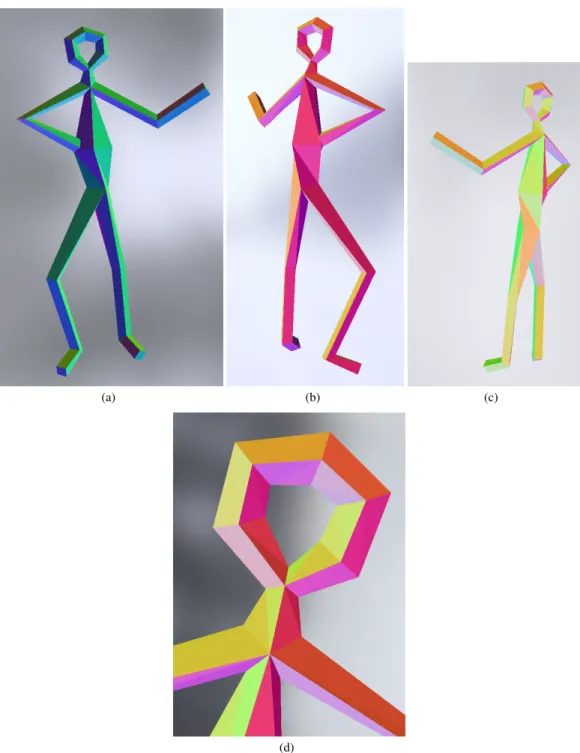
Figure


Documents relatifs
Contrarily to the case of locally compact groups, neither existence nor uniqueness hold in general. Then, the counting measures form a Haar system and one says that G is an ´
Three kinds of dermal skeletal elements (scales, lepi- dotrichia, and fulcra) are composed of the three characteris- tics components of the dermal post-cranial skeleton of early
Afin de valider la ressemblance des caractéristiques électrique d’un module PV, nous avons appliquer la technique de recherche du point de puissance maximale , appelée
Das Vorwort, ein vier- gliedriges Literaturverzeichnis (frühere Textausgaben des Stephanos, Ausgaben an- tiker und byzantinischer Autoren, Nachschlagewerke und Sekundärliteratur
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Il est important pour le médecin traitant d’évaluer les facteurs de risque car leur identification et leur contrôle vont permettre de diminuer le risque d’évolution de
The scaffolding of a reduced context of a doubly founded concept lattice is now defined using the construction of Theorem 2 by fixing specific subcontexts and bonds..
Definition 2.4. A p-pre-admissible forest f is called p-admissible if the distinguished vertex lies in the leftmost infinite tree of f, i.e. if for every r ≥ 0, the leftmost vertex of
