HAL Id: tel-00994937
https://tel.archives-ouvertes.fr/tel-00994937
Submitted on 22 May 2014HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Circulation côtière en Méditerranée Nord Occidentale :
courantométrie par radar HF et couplage avec un
modèle numérique
Julien Marmain
To cite this version:
Julien Marmain. Circulation côtière en Méditerranée Nord Occidentale : courantométrie par radar HF et couplage avec un modèle numérique. Autre [cond-mat.other]. Université de Toulon, 2013. Français. �NNT : 2013TOUL0015�. �tel-00994937�
ÉCOLE DOCTORALE 548 – Mer et Sciences
Institut Méditerranéen d'Océanologie
THÈSE
présentée par :
Julien MARMAIN
soutenue le :
16 Décembre 2013pour obtenir le grade de Docteur en Sciences de l'Univers
Spécialité
: Océanographie
Circulation côtière en Méditerranée Nord
Occidentale: courantométrie par radar HF
et couplage avec un modèle numérique
THÈSE dirigée par :
Mme. Anne MOLCARD Professeur, UTLN Directrice
M. Philippe FORGET Directeur de Recherche, CNRS Co-directeur
JURY :
M. Pierre BRASSEUR Directeur de Recherche, CNRS Rapporteur
M. Alexei SENTCHEV Maître de Conférence, ULCO Rapporteur
M. Jeffrey PADUAN Associate Professor, NPS Monterey CA Examinateur
M. Alexander BARTH Chercheur Qualifié, FNRS Examinateur
M. Yann OURMIERES Maître de Conférence, UTLN Examinateur
Mme. Anne MOLCARD Professeur, UTLN Directrice
iii
À mon frère, Guillaume À mon beau-père, Yves partis trop tôt...
À ma femme, Adélaïde À mon fils, Lucas toujours là...
v
Faire face (Georges Guynemer)
Remerciements
Effectuer une thèse n’a pas toujours été une évidence pour moi car j’avais de nombreux a priori : inaccessible, fastidieux, sans intérêt, ennuyeux. Pourtant, me diriger vers la recherche devint évident, quand en situation opérationnelle, observant le ciel et la mer du haut du pont 07 du Porte-avions Nucléaire Charles de Gaulle, certaines de mes questions restaient sans réponses. Mes supérieurs hiérarchiques de l’époque, en particulier Ludovic Pierredon et Stéphane Letirand, ont compris ma façon de penser. Je remercie les personnes qui m’ont aidé à quitter les drapeaux afin de reprendre mes études.
Le hasard m’a fait rencontrer Anne Molcard, ma directrice de thèse, qui après un premier stage de Master 1 à propos du fameux ADUSIMICO, m’a accordé la chance d’effectuer mon stage de Master 2 qui déboucha sur mes travaux de thèse au sein du LSEET qui depuis est devenu le MIO. Anne, pour cette opportunité que tu m’as offerte, pour la confiance, le soutien, l’encadrement que tu m’as apporté, pour les sorties en mer et pour tout ce que j’oublie, je souhaite te remercier chaleureusement et j’espère que la fin de cette thèse ne marquera pas le fin de notre collaboration. Ces dernières années m’ont également permis de travailler avec Philippe Forget, dont sa fonction de co-directeur de thèse aurait pu le laisser à un second plan de mes travaux mais qui pourtant m’a apporté un soutien sans faille, présent à toutes les étapes de mes travaux de thèse, m’épaulant dès mon arrivée au laboratoire, en m’enseignant patiemment et corrigeant encore mes fautes d’orthographes aujourd’hui ! Philippe, je vous remercie.
Je tiens ensuite à remercier les différents membres du jury d’avoir accepter d’évaluer mon travail.
Bien que ce manuscrit porte mon nom sur sa première page, c’est en fait un travail d’équipe mené avec les nombreuses personnes qui m’ont entouré au sein du MIO, en facilitant mon travail, en échangeant des idées, en répondant à mes interrogations, ou tout simplement, en rendant la vie quotidienne plus agréable. Ces personnes sont nombreuses et j’en oublierai probablement si je voulais toutes les remercier. Alors, je remercie tous ceux qui ont contribué au succès de mon travail. Je pense en particulier à Karen qui m’a permis de me sentir moins seul face à mon écran et de gagner un temps précieux sur l’utilisation de GLAZUR64. Je pense aussi à Lucio, mon acolyte des campagnes TOSCA. Je remercie également Yann, mon collègue de bureau, pour ces remarques toujours pertinentes, et Bruno, pour ses suggestions riches et variées... Mais je n’ai pas encore eu le temps de tout faire ! Je tiens aussi à remercier l’équipe Radar, en particulier Yves, Céline et Joël, qui m’ont fait partager leur savoir sur cet instrument complexe, Didier et Camille toujours présents pour déboguer mon ordinateur, m’expliquer les secrets du ssh, de la compilation avec Fortran et Fabienne pour les ordres de missions impromptus. Je remercie
viii
également mes compagnons de galère, Jérémy, Amandine, Ambre, Genna, Gwendoline, et les thésards que j’ai connu depuis mon arrivée au labo, Alexandra, Amandine, Sara, Elisa. Je tiens à remercier également toutes les personnes avec qui j’ai pu avoir des discussions, Léo, Sébastien, Stéphane, Frédéric, Samuel, Hubert, Jean-Luc, Quentin, Pascal...
J’aimerai également remercier les personnes extérieures au MIO avec qui j’ai pu collabo-rer, Alexander Barth, Alexei Sentchev, Alejandro Orfila et les différents partenaires du projet TOSCA.
Je tiens également à remercier ma famille qui a toujours soutenu mes projets et m’a donné les moyens de les réaliser, mes parents Guy et Martine, toujours présents ; mes petites sœurs, Justine et Sabrina et mon beau frère, Sandy ; ma belle famille, Monique, Clara, Eric, Jean-Charles, Julien, Vincent et Anne ; ma grand-mère, mes oncles et mes tantes, en particulier tata Brigitte qui m’a appris à compter (ou presque !) et aussi mes cousins et cousines. Parce qu’ils ne verront jamais que j’y suis parvenu, mais n’ont jamais douté que j’y arriverai, je tiens à remercier mon petit frère, Guillaume, et mon beau-père, Yves, qui ne m’ont pas quitté depuis qu’ils sont partis.
Deux personnes ont également beaucoup compter pour moi au long de ce parcours et j’ai-merai les remercier de m’avoir supporter patiemment : la femme que j’aime, Adélaïde, qui a su m’épauler, me réconforter pendant ces trois années qui ont pu être difficiles à certains moments et qui est prête à me suivre là où les courants et le vent nous porterons ; mon fils, Lucas, qui du haut de ses six ans voit toujours son papa partir à l’école le matin pour ensuite lui raconter des histoires sur des choses qui le passionnent déjà.
Je remercie aussi tous mes amis qui ne m’ont pas vu beaucoup pendant ces trois ans, pour n’en citer que deux, tonton Greg qui finalement m’aura précédé de quelques jours pour la soutenance de ces travaux de thèse et mon petit lapin, Davy.
Ces travaux ont été effectués dans le cadre des projets TOSCA, ECCOP et GMMC. Bien que les données de radar HF soient le jeu d’observation central de cette thèse, j’ai également utilisé de nombreuses données d’observation ou de simulations numériques et je tiens à remercier les différents organismes me les ayant fournis : Mercator-Océan, Météo France, Coriolis, My Ocean. Les simulations numériques réalisées avec la configuration GLAZUR64 ont été réalisées à l’IDRIS.
Table des matières
Remerciements vii
Introduction 3
I Observation et modélisation de la circulation côtière en Mer
Méditer-ranée Nord Occidentale. 11
1 Le radar courantométrique : un moyen d’observation synoptique des courants
de surface en zone côtière 13
1.1 Généralités sur les radars courantométriques . . . 14
1.1.1 Principe de la mesure des courants par radar . . . 14
1.1.2 Les différents systèmes de radar courantométrique . . . 16
1.1.3 Liens entre le traitement des signaux mesurés par radar et la résolution des vitesses radiales . . . 17
1.1.4 Principales applications des radars courantométriques . . . 20
1.1.5 Répartition des radars courantométriques à travers le monde . . . 21
1.1.6 Implication des radars courantométriques pour l’étude de la circulation le long des côtes françaises . . . 23
1.2 Traitement et validation des courants de surface mesurés par radar HF au large des côtes varoises . . . 25
1.2.1 Le système d’observation par radar HF sur les côtes varoises . . . 25
1.2.2 Campagnes de mesure in situ au large des côtes varoises . . . 30
1.2.3 Traitement des vitesses radiales : du contrôle qualité à la validation des vitesses vectorielles . . . 31
1.3 Caractérisation des propriétés du courant de surface à partir des mesures d’une station radar unique (Marmain et al., 2011) . . . 37
2 La modélisation numérique : un outil de simulation de la circulation côtière 51 2.1 Configurations régionales de la Mer Méditerranée Nord Occidentale . . . 51
2.1.1 NEMO - GLAZUR64. . . 52
2.1.2 ROMS - RGLAZUR12 . . . 53
2.2 Forçages . . . 54
2.2.1 Forçages atmosphériques . . . 54
x Table des matières
2.2.2 Forçages océaniques . . . 55
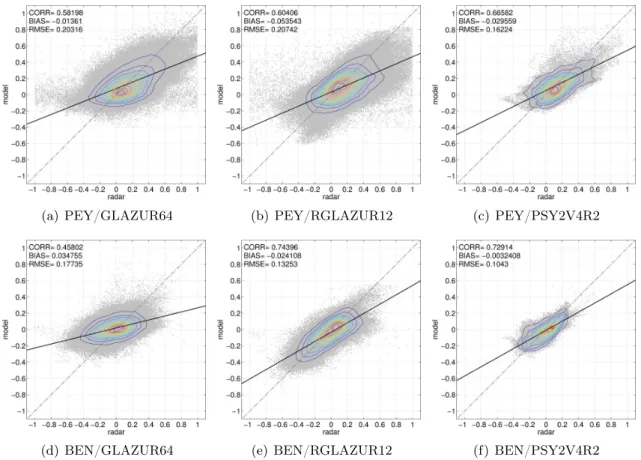
2.3 Validation des outils de simulation . . . 55
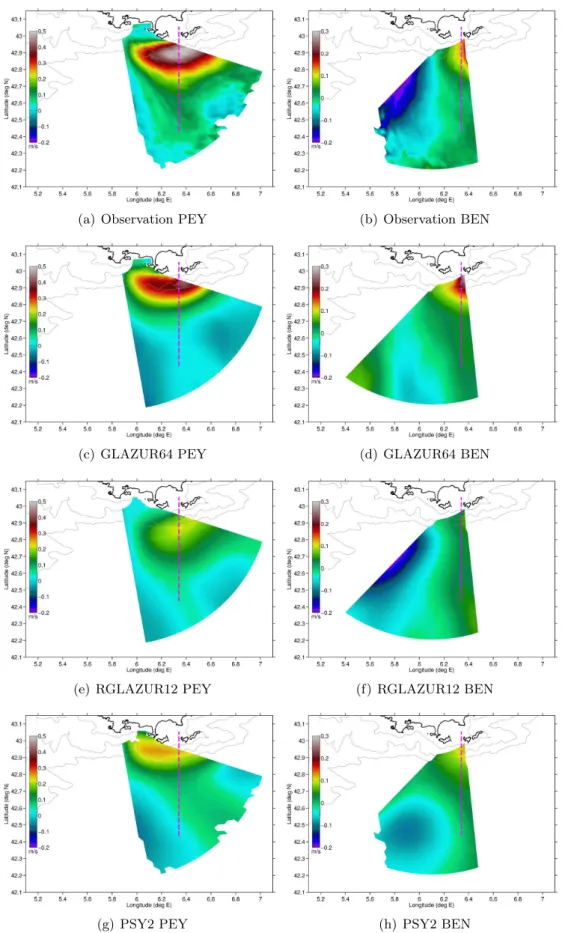
2.3.1 Validation des courants de surface . . . 55
2.3.2 Validation des températures de surface . . . 60
2.3.3 Représentation des masses d’eau sur la verticale. . . 64
2.3.4 Validation des simulations de vent sur les côtes varoises . . . 66
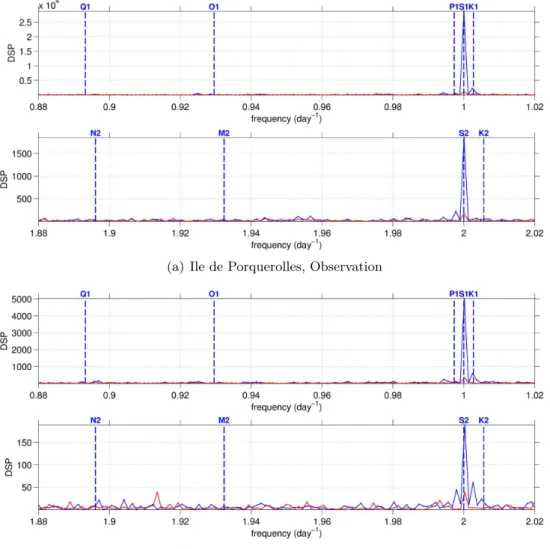
II Caractéristiques de la circulation côtière sur les côtes varoises à partir des données de radar HF 71 3 Caractéristiques de la circulation côtière sur les côtes varoises à partir des données de radar HF 73 3.1 Phénomènes périodiques identifiés par l’analyse spectrale des données de la station radar de Peyras . . . 73
3.1.1 Données . . . 73
3.1.2 Correspondance des spectres de vitesses radiales et vectorielles . . . 74
3.1.3 Identification de phénomènes périodiques à partir des séries longues de vitesse radiale issues du radar PEY. . . 79
3.1.4 Conclusion partielle . . . 86
3.2 Variabilité du Courant Nord au large des côtes varoises à partir des vitesses de surface radar HF (2010-2012) . . . 87
3.2.1 Méthodologies d’identification du CN. . . 87
3.2.2 Variabilité des caractéristiques de la veine de CN . . . 95
3.2.3 Conclusion partielle . . . 99
3.3 Analyse d’un événement de méso-échelle (Guihou et al., 2013) . . . 100
III Assimilation de vitesses de surface mesurées par radar HF 101 4 Généralités sur l’assimilation de données 103 4.1 Définitions des variables et des erreurs associées . . . 103
4.2 Méthodes stochastiques d’assimilation de données . . . 106
4.2.1 Estimation de l’état optimal : la méthode BLUE . . . 106
4.2.2 Filtres de Kalman de rang plein. . . 109
4.2.3 Filtres de Kalman de rang réduit . . . 111
4.3 Autres méthodes d’assimilation de données . . . 126
4.3.1 Méthodes variationnelles . . . 126
4.3.2 Nudging . . . 127
4.4 État de l’art de l’assimilation des vitesses de surfaces issues des radars couranto-métriques. . . 129
4.5 L’assimilation de données pour le contrôle des forçages . . . 133
4.5.1 Contrôle du vent . . . 133
Table des matières xi
4.6 Conclusion. . . 134
5 Estimation optimale des forçages par assimilation de vitesses de surface
me-surées par radar HF 137
5.1 Caractérisation de l’erreur du modèle avec les méthodes d’ensemble . . . 137
5.1.1 Génération de l’ensemble . . . 138
5.1.2 Analyse des erreurs du modèle . . . 140
5.2 Assimilation de courants de surface mesurés par radar HF pour l’optimisation de forçages en Méditerranée Nord Occidentale (Marmain et al., en révision) . . . 151
Conclusion 185
Bibliographie 191
Table des figures 211
Liste des tableaux 217
A Une étude de cas de la dynamique de méso-échelle en Méditerranée Nord Occidentale : une approche combinant observations et simulations numériques
(Guihou et al., 2013) 221
B Estimateurs statistiques de l’Erreur et variabilité 239
C Data INterpolation using EOF 241
C.1 Description de la méthode . . . 241
C.2 Implémentation de DINEOF sur la configuration PEY-POB . . . 243
D Combinaison des vitesses radiales par la méthode des moindres carrés 251
E Généralités sur la formulation des conditions aux frontières ouvertes (OBC)255
E.1 Les méthodes de relaxation . . . 256
E.2 Les méthodes radiatives . . . 256
Introduction
3
Le Courant Nord méditerranéen : la principale composante de la
circulation côtière en Méditerranée Nord Occidentale
La zone de transition entre le continent et l’océan hauturier constitue l’océan côtier1
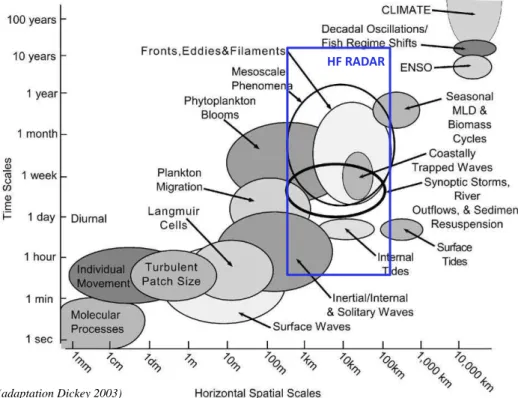
dont la dynamique est conditionnée par les faibles profondeurs, la présence de la côte et est gouvernée par de nombreux forçages : la marée, le vent, les flux à l’interface air/mer (chaleur, précipi-tation/évaporation, bio-géochimique), les apports hydrologiques continentaux et le forçage de la circulation de grande échelle. L’impact de la topographie et des forçages est à l’origine de processus non linéaires associés à des échelles spatiales de l’ordre de 1 à 100 km et des échelles temporelles se répartissant de l’heure à l’année (Fig.1).
HF RADAR
(adaptation Dickey 2003)
Figure1– Echelles résolues par les radars courantométriques. Adaptation du diagramme deDickey (2003).
En Méditerranée Nord Occidentale, la principale composante de la circulation côtière est un courant côtier, appelé Courant Nord (CN) ou Courant Liguro-provençal, qui s’écoule en particulier le long de la façade maritime française, au large des côtes varoises (Fig.2). Il représente la composante Nord de la circulation générale cyclonique dans le bassin Ouest méditerranéen qui a été décrite dans différentes études (e.g.Millot, 1999; Langlais,2007;Schaeffer, 2010; Duchez,
2011;Guihou et al.,2013).
Cette circulation est soumise à un régime microtidal (e.g. Alberola et al., 1995b) et résulte principalement de forçages d’origine climatique. Le climat doux et humide est à l’origine d’une forte évaporation entraînant un déficit en eau qui n’est pas compensé par les précipitations et les
1. L’océan côtier est à distinguer de l’océan littoral qui constitue la zone directement en contact avec la surface continentale et qui présente les plus faibles profondeurs. L’eau et les sédiments y sont fortement affectés par le mouvement et le déferlement des vagues.
4 Introduction
apports d’eau continentale, ce qui fait de la Méditerranée un bassin d’évaporation et de concen-tration en sel. L’équilibre se maintient par le détroit de Gibraltar où les eaux atlantiques entrent en surface, plus froides et dessalées, et où les eaux méditerranéennes sortent en profondeur, plus chaudes et plus salées permettant d’évacuer l’excès de sel. La circulation est également soumise à la force de Coriolis qui dévie les masses d’eau vers la droite les contraignant à s’écouler le long des côtes, formant ainsi une circulation cyclonique. Un schéma de la circulation générale dans le bassin méditerranéen peut être trouvé dansMillot (1999).
Les eaux de surface atlantiques modifiées (MAW2), situées jusqu’à 200 m de profondeur, caractérisent la couche de surface Nord méditerranéenne. Elles résultent de l’écoulement des eaux atlantiques le long des côtes du Maghreb qui, soumises à une forte activité de méso-échelle, se mélangent avec les eaux environnantes. Pendant leur circulation dans le bassin occidental, elles peuvent être fortement refroidies en hiver et former l’eau hivernale modifiée (WIW3
). Au niveau du canal de Sicile, deux branches de circulation se distinguent en surface. La pre-mière remonte le long des côtes italiennes, alors que la seconde s’écoule dans le bassin oriental en suivant les côtes tunisiennes. C’est dans ce dernier que se forment les eaux lévantines in-termédiaires (LIW4) qui résultent de la convection des eaux de surface refroidies par les vents hivernaux et qui atteignent une profondeur de stabilité comprise entre 200 et 800 m. La LIW s’écoule ensuite dans le bassin occidental par le canal de Sicile en restant à cette profondeur et suivent la même circulation que la MAW en surface. Toujours guidées par la bathymétrie, elles suivent les côtes italiennes. La MAW et une petite partie de la LIW franchissent le canal de Corse, formant le courant Est Corse (ECC5) alors que la majeure partie de la LIW contourne la Corse et la Sardaigne par le Sud formant le courant Ouest Corse (WCC6
). Les eaux profondes de la Méditerranée Ouest (WMDW7
) sont formées dans le bassin Liguro-Provençal par convection. En hiver, des vents forts et secs, d’origine continentale, créent une évaporation importante et refroidissent significativement la couche de surface. Des eaux plus denses se forment à la surface et plongent jusqu’à atteindre leur équilibre (∼ 800 m - fond).
L’ajustement géostrophique de ces différentes masses d’eau est responsable de la circulation cyclonique observée en Méditerranée Occidentale. En particulier le CN est un courant de den-sité généré par la circulation des différentes masses d’eaux méditerranéennes qui résulte de la rencontre des courants ECC et WCC en mer de Ligure. Il s’écoule le long des côtes italiennes, françaises et espagnoles jusqu’au niveau des îles Baléares où il se sépare en deux veines. La pre-mière continue vers le Sud en suivant les côtes espagnoles, alors que la seconde est déviée vers l’Est, au Nord des îles Baléares, pour fermer la boucle de circulation cyclonique de la Méditer-ranée Nord occidentale.
Depuis les années 1980, de nombreuses études ont permis de préciser les caractéristiques du CN. Cette veine de courant est définie différemment en fonction de la zone et des auteurs. En
2. Modified Atlantic Water 3. Western Intermediate Water 4. Levantine Intermediate Water 5. Eastern Corsican Current 6. Western Corsican Current
5
considérant des sections verticales,Petrenko(2003) définit le CN comme présentant des vitesses supérieures à 0.05 m/s sur le talus du golfe du Lion. Au large de Nice, Alberola et al. (1995a) utilisent un seuil de 0.1 m/s etNiewiadomska(2008) le définit par rapport à sa vitesse maximale. D’autres études montrent qu’il affecte toute la couche d’eau car il n’existe pas de cisaillement de vitesse entre les masses d’eaux le constituant (Conan and Millot, 1995). Le CN est aussi identifiable par sa signature thermique de surface, car il forme une langue d’eau plus chaude que les eaux du plateau ou du large, héritée du courant ECC (Millot and Wald,1980;Crépon et al.,
1982).
Le CN présente une variabilité saisonnière marquée qui affecte notamment sa position, sa largeur, sa profondeur et son intensité. Elle est due à la variabilité des courants ECC et WCC qui font varier son transport de 1 à 2 Sv en fonction des saisons (Béthoux et al.,1982;Alberola et al.,1995a), ce transport étant du même ordre de grandeur que les apports d’eau par le détroit de Gibraltar. L’action des forçages atmosphériques n’explique qu’une faible part de la variabilité du CN, principalement due aux forçages thermohalins (Béthoux et al., 1982). En été et en automne le CN est influencé par l’ECC et le WCC. Il est large d’environ 40 km, profond de 250 m et s’écoule avec des vitesses moyennes de l’ordre de 0.2 m/s (e.g.Alberola et al.,1995a;Conan and Millot,1995;Millot,1999;Petrenko,2003). En hiver l’augmentation du transport de l’ECC à travers le canal de Corse, trois fois plus important en cette saison, entraîne une accélération et un resserrement de la veine qui se rapproche des côtes (Taupier-Letage and Millot, 1986;
La Violette,1994) et présente une largeur de 25 km et une profondeur de 450 m avec des vitesses pouvant atteindre 1 m/s (Sammari et al.,1995;Petrenko,2003). Cependant ce schéma saisonnier peut être fortement perturbé par des variations de forte amplitude associées à des phénomènes de méso-échelle dues aux conditions atmosphériques, aux apports fluviaux, à la formation d’eau profonde, à la propagation de méandres et à la formation de tourbillons.
Le CN est naturellement guidé par la bathymétrie et s’écoule le long des isobathes 1000 et 2000 m (Conan and Millot,1995;Flexas et al.,2005). Cependant les forçages atmosphériques et les nombreux canyons qui indentent le talus continental peuvent ainsi contribuer aux instabilités du CN. La variabilité importante qui en découle est surtout marquée en hiver, quand le CN est plus intense et plus près des côtes. L’influence de la bathymétrie accidentée y est plus forte et des instabilités peuvent alors se développer, générant des méandres d’amplitude 10-20 km et de longueur d’onde allant de quelques dizaines à quelques centaines de kilomètres, avec des vitesses de propagation de l’ordre de 10 km/jour et associés à des oscillations dans les bandes temporelles 2 à 6 jours et 10 à 20 jours. Ces méandres ont été observés en mer de Ligure et au large de Nice (Crépon et al.,1982;Alberola et al.,1995b;Sammari et al.,1995) et le long du talus du golfe du Lion (Flexas et al., 2002). Récemment un méandre du CN a également été étudié au large des côtes varoises (Guihou et al.,2013).
Le renforcement des instabilités peut être à l’origine de la formation de tourbillons anticyclo-niques qui se détachent du CN et se propagent le long de celui-ci sur le plateau du golfe du Lion (Flexas et al.,2002;Petrenko,2003;Echevin et al., 2003; Rubio et al.,2005). La discontinuité topographique du plateau du golfe du Lion induit un changement de direction de la veine du CN qui peut entraîner des instabilités affectant la pénétration sur le plateau d’une partie de l’écou-lement. Ces intrusions peuvent également être favorisées par le rotationnel du vent (Petrenko
6 Introduction
Golfe
du Lion
Mer de
Ligure
Méditerranée Nord
Occidentale
Figure 2 – Bathymétrie de la Méditerranée Nord Occidentale. Les isobathes 0, 50, 100, 250 puis jusqu’à 2500 m tous les 250 m sont montrées. Les isobathes 0 et 1000 m sont tracées en noir. La côte varoise est matérialisée en rouge.
et al.,2008;Schaeffer et al.,2011b).
Utilisation des radars HF pour une meilleure connaissance de la
circulation côtière : application aux côtes varoises
Bien que le CN a été largement étudié au large de Nice (e.g.Alberola et al.,1995b;Sammari et al.,1995), de Marseille (e.g.Conan and Millot,1995) et dans le golfe du Lion (e.g. Petrenko,
2003), la zone des côtes varoises qui constitue une zone de transition entre la mer de Ligure et le golfe du Lion est encore mal connue. Les processus siégeant dans cette zone et leur connais-sance lacunaire font des côtes varoises une zone d’étude importante pour la compréhension de la dynamique en Méditerranée.
Cette thèse est une contribution à la description des principales caractéristiques de la circulation océanique côtière au large des côtes varoises. Du fait que le principal instru-ment de mesure utilisé soit un système radar HF, ces caractéristiques intéressent en premier lieu la circulation de surface.
La circulation côtière est caractérisée par des processus de subméso- à méso-échelle (de l’ordre de 1 à 100 km et de 1 h à une année, e.g. Fig.1). Les moyens conventionnels d’observation in situ
7
(e.g. ligne de mouillage, sondage de température et salinité) ou par télédétection spatiale (e.g. altimétrie, température de surface) ne permettent pas de résoudre convenablement ces échelles. En effet, l’instrumentation in situ ne permet pas d’avoir à la fois un échantillonnage spatial et temporel à haute résolution et régulièrement espacé. Les instruments de télédétection spatiale présentent une période de répétition élevée (> 1 jour) avec des résolutions souvent mal adaptées à la bande côtière.
Les radars courantométriques, souvent appelés radars HF8
(HFR) surmontent les limitations des autres instruments, in situ et spatiaux, en permettant des mesures de vitesse de surface avec une résolution de l’ordre de 1 km, une portée pouvant dépasser les 100 km et une résolution tem-porelle horaire (Fig.1). Au moins deux stations radars HF distantes sont nécessaires pour obtenir une information vectorielle sur le courant de surface. L’utilisation du radar HF est en plein essor, en particulier en Méditerranée. Cette thèse a débuté avec l’installation d’une première station HFR sur les côtes varoises en mai 2010 qui a permis d’acquérir des données inédites sur une longue période mais a fonctionné seule jusqu’en Novembre 2011. Ce fonctionnement prolongé (∼1.5 an) avec une seule station nous a poussé à développer des méthodes permettant d’obtenir des informations sur la circulation à partir d’une station radar HF unique.
Les informations fournies par les observations restent néanmoins partielles. La modélisation numérique, qui connaît un développement important depuis de la fin des années 1980 en Méditer-ranée, donne accès à des informations 4D sur l’état de l’océan complétant ainsi les observations. La description du milieu côtier nécessite des configurations dites régionales, définies sur un do-maine réduit afin de limiter les coûts de calcul, mais avec des résolutions permettant de résoudre les échelles côtières.
L’utilisation de configurations régionales soulève différentes difficultés ayant une répercussion sur la précision de la solution calculée par le modèle. Mis à part les erreurs qui apparaissent généralement en modélisation dues, par exemple, à la bathymétrie, la discrétisation spatiale et temporelle ou la paramétrisation des phénomènes sous maille, les configurations régionales sont soumises à la qualité des forçages extérieurs permettant de prescrire les flux atmosphériques en surface et les conditions aux limites océaniques. Les forçages sont souvent donnés par des configu-rations de plus basse résolution ce qui peut poser des problèmes spécifiques. En particulier, pour les forçages océaniques, le problème de réduction d’échelle ("downscaling"), dû à l’imbrication ("nesting") du domaine régional dans le domaine de plus grande emprise, implique des interpo-lations sur les frontières entre ces modèles, ceux-ci pouvant avoir des dynamiques incompatibles (Auclair et al.,2001).
La qualité des forçages atmosphériques ou océaniques a également un impact important sur les simulations. En particulier, l’impact important du vent sur la circulation en zone côtière a été montré à plusieurs reprises (He et al.,2004;Barth et al.,2008b;Langlais et al.,2009a;Schaeffer et al.,2011a). Par ailleurs, le comportement d’un courant côtier et en particulier le CN, contraint par sa dynamique en amont, est influencé par la qualité des forçages aux frontières du domaine régional (Guihou,2013).
8. En radio-océanographie, le terme HF qui désigne normalement la bande fréquentielle de 3-30 MHz désigne également une partie de la bande VHF (30-50 MHz) (e.g.Barrick,1978).
8 Introduction
Les forçages sont également entâchés d’erreurs et leur optimisation est alors une voie pertinente pour corriger les modèles. Dans cette thèse, nous explorons l’optimisation les forçages de vent et aux frontières océaniques ouvertes d’un modèle régional aux équations primitives afin de corriger les simulations de courants de surface à partir des vitesses de surface mesurées par radars HF dans la zone côtière située au large des côtes varoises.
L’assimilation des vitesses de surface pour la correction des forçages de modèles régionaux et leur imbrication dans des configurations de plus grande ampleur en sont encore à un stade exploratoire. De plus, l’assimilation de données radar HF en Méditerranée n’a pas encore fait l’objet de publication.
Les études menées lors de cette thèse ont été réalisées dans le cadre de différents projets. Le projet ECCOP9
("Etude de la Circulation Côtière en zone Provençale") est un projet soutenu par LEFE/IDAO (2011-13). Il s’intéresse en particulier à la description des processus de méso-échelle et leur rôle dans la dynamique et la variabilité de la circulation dans la zone située devant les côtes varoises jusqu’à 100 km au large. Cette thèse contribue également au projet TOSCA10
("Tracking Oil Spill and Coastal Awereness"), cofinancé par le Fond Européen de Développement Régional (FEDER) dans le cadre du Programme Med (2010-2013), qui a pour objectif d’améliorer la qualité et l’efficacité de la décision en cas d’accidents maritimes en Méditerranée, afin d’apporter une réponse efficace en cas de pollution d’hydrocarbures ou d’opérations de recherche et de sauvetage.
Cette thèse s’inscrit également dans d’autres activités nationales comme le GMMC11 ou le chantier national MISTRALS12
.
Plan de thèse
Le principe de mesure des courants de surface avec les radars courantométriques et les spé-cificités du système radar HF des côtes varoises sont présentés dans la première partie. L’ins-tallation récente de ce système nous a conduit à valider les mesures de vitesses en vue de leur utilisation. Par ailleurs, la disponibilité d’une seule station radar HF sur une longue période a mené au développement de méthodes afin d’utiliser les vitesses provenant d’une station unique (Marmain et al.,2011). La description de la circulation est également réalisée à l’aide de modèles numériques qui sont présentés dans cette partie. Les champs simulés sont validés par la compa-raison avec les observations radar HF d’une part, et avec des observations de températures de surface satellitales et des profils de température et salinité in situ d’autre part.
Dans la seconde partie, nous montrons que les vitesses radiales provenant d’une seule station peuvent être utilisées pour obtenir des informations sur la circulation de surface. Dans un premier temps, nous identifions les principaux phénomènes périodiques affectant la circulation de surface au large des côtes varoises. Puis les caractéristiques de position, largeur et vitesse de la veine du
9. http://hfradar.univ-tln.fr/HFRADAR/squel.php?content=ProgrammesScientifiques.php
10. http://www.tosca-med.eu/
11. Groupe Mission Mercator Coriolis
9
CN sont extraites. Cette partie utilise les données de vitesse mesurées sur la période mai 2010 -septembre 2012.
L’assimilation des données radar HF est traitée dans la troisième partie. Des généralités sur les méthodes d’assimilation de données sont présentées de manière préliminaire. Ensuite, une quantification de l’erreur sur les vitesses de surface d’une configuration de la Méditerranée Nord Occidentale due à des incertitudes sur les forçages de vent et aux frontières océaniques est réalisée. L’assimilation des vitesses radar HF est effectuée pour optimiser ces forçages afin de réduire les erreurs sur les courants de surface.
Première partie
Observation et modélisation de la
circulation côtière en Mer Méditerranée
Nord Occidentale.
Chapitre 1
Le radar courantométrique : un moyen
d’observation synoptique des courants
de surface en zone côtière
La zone côtière est le siège de phénomènes physiques ayant des échelles de variabilité spatiale et temporelle qu’il est difficile de résoudre avec des moyens conventionnels d’observation. Les instruments de mesure in situ (e.g. flotteurs de surface ou ARGO, ADCP, mouillage, glider) permettent d’obtenir une fréquence temporelle d’échantillonnage élevée mais ne peuvent pas être positionnés simultanément en tous points de l’océan. Les observations réalisées par télédétection satellitales, permettent d’obtenir une mesure quasi-instantanée à haute résolution spatiale des paramètres de surface de l’océan. Cependant elles présentent une trop basse résolution temporelle pour résoudre des phénomènes de méso-échelle. De plus la résolution de la plupart des capteurs embarqués actuels ne permet pas d’obtenir des informations fiables, en particulier dans la bande côtière1
.
Dans ce contexte, les radars courantométriques côtiers permettent d’apporter des informations là où les autres instruments n’en ont pas la capacité. Installés sur les côtes, ils permettent notamment d’effectuer des mesures des courants de surface en continu sur une zone étendue, avec des portées pouvant dépasser 100 km. Ils fournissent des observations ayant des résolutions spatiales relativement fines (O(100m − 1km)) avec un échantillonnage temporel haute fréquence (jusqu’à une carte toutes les 20 minutes). Ces performances ont largement été exploitées afin de décrire des phénomènes allant de la subméso-échelle à l’échelle synoptique dans la zone côtière (récemment,Kaplan and Largier,2006;Shay et al.,2007;Yoshikawa et al.,2007;Shadden et al.,
2009;Parks et al.,2009;Molcard et al.,2009;Allou et al.,2010;Kim,2010;Sentchev et al.,2011;
Guihou et al.,2013).
L’objectif de ce chapitre n’est pas de décrire précisément la physique de la mesure d’un tel système, ni même le traitement des mesures. Nous nous placerons du point de vue d’un utilisateur ayant à sa disposition des mesures de courant fournies par différents sites. La première section
1. Notons cependant l’évolution actuelle de l’altimétrie pour l’étude du milieu côtier avec le lancement du satellite SARAL (http://smsc.cnes.fr/SARAL/Fr/) en février 2013 qui embarque l’altimètre de haute précision
Alti-Ka dédié à la mesure de la topographie de la surface des océans.
14 Chapitre 1. Le radar courantométrique
donnera les éléments clés pour la compréhension de la physique de la mesure afin de comprendre les limitations imposées par le système. Nous nous intéresserons également aux applications de ce type de système et à sa répartition géographique au niveau mondial. La deuxième section s’intéressera à l’observation par radar courantométrique sur la côte varoise et aux traitements des données de courants de surface issus des mesures. Dans la troisième section nous proposerons différentes méthodes pour tirer profit des données provenant d’une station unique.
1.1 Généralités sur les radars courantométriques
1.1.1 Principe de la mesure des courants par radar
La mesure du courant de surface à l’aide des radars courantométriques côtiers repose sur le principe de la diffraction de Bragg cohérente. Le principe de l’interaction entre les ondes électromagnétiques (EM) et les vagues a été montré expérimentalement parCrombie(1955) qui, le premier, a envisagé le radar HF comme un instrument de mesure du champ de vagues. L’étude des spectres Doppler, qui rendent compte du décalage fréquentiel entre les signaux émis et reçus par un HFR pendant la durée de la mesure, présentent des caractéristiques particulières (Fig.1.1). Ils consistent en deux pics d’énergie, disposés de part et d’autre de la fréquence porteuse f0 de
l’onde EM émise par le HFR, entourés d’un continuum ayant une énergie beaucoup plus faible. Crombie a montré que ces pics provenaient de deux sources distinctes se déplaçant à vitesse constante. Cette vitesse est calculée en utilisant la relation exprimant la vitesse de déplacement des sources v0
B en fonction du décalage Doppler fB :
v0B= λfB
2 (1.1)
où λ représente la longueur d’onde de l’onde EM émise. Soit la relation de dispersion des ondes de gravités en eaux profondes donnée par
v0B=r gLB
2π (1.2)
où LBreprésente la longueur d’onde du train de vague océanique et g l’accélération de la gravité.
Connaissant fB,Crombie(1955) a pu en déduire LB en résolvant 1.1=1.2, tel que
LB=
λ
2 (1.3)
Ainsi, tous les trains de vague présents à la surface de la mer contribuent à la diffraction de l’onde EM émise par le radar, mais les trains de vague qui diffusent le maximum d’énergie dans la direction du radar sont ceux dont la longueur d’onde mesure la moitié de celle émise par le radar et se déplaçant vers lui (fréquence Doppler positive) ou en direction opposée (fréquence Doppler négative). Cet effet est connu comme la diffraction de Bragg. Par extension, nous parlerons de raies de Bragg, pour parler des deux pics créés par les vagues de Bragg.
1.1 Généralités sur les radars courantométriques 15 ΔfB ΔfB First-order echoes Second-order echoes +fB -fB
Figure 1.1 – Exemple de spectre Doppler d’un signal rétrodiffusé par la surface de la mer en direction du HFR. Les raies du premier ordre et les échos du second ordre sont visibles. Le décalage entre les fréquences de Bragg théoriques (±fB) et mesurées est représenté par la quantité ∆fB.
La théorie de ce mécanisme a été développée dans différentes études (Rice,1951;Barrick and Peake,1967;Barrick,1968,1972). Il apparaît que le spectre de puissance Doppler consiste en deux raies discrètes, qualifiées d’échos du premier ordre, avec un décalage fréquentiel fB = ±r gf0
πc par rapport à la fréquence porteuse f0. Le continuum d’énergie, apparaissant sur le spectre, est
associé à des phénomènes d’ordres supérieurs et sera qualifié de second ordre. Il a été prouvé expérimentalement que ces échos du second ordre sont principalement dus aux échos de mer plutôt qu’à du bruit dans le système de mesure (Barrick,1978). Le second ordre n’est pas utilisé en courantométrie mais pourra se confondre avec les pics du premier ordre en cas de présence de houles longues ou d’états de mer importants.
L’observation de positions expérimentales des pics de Bragg montre que celles-ci sont décalées d’une fréquence ∆fB par rapport à fB (Fig.1.1). Ce décalage est dû au transport des vagues
par les courants sous-jacents (Stewart and Joy,1974). Les radars permettent ainsi de mesurer la composante du courant dans la direction radiale, définie comme la direction de propagation des vagues de Bragg. Soit er, un vecteur unitaire de cette direction radiale orienté vers le radar. Dans
le cas monostatique, c’est à dire quand l’émetteur et le récepteur sont colocalisés, la direction radiale correspond également à la direction de visée du HFR qui représente les normales aux cercles dont le HFR est au centre. Dans le cas bistatique, c’est-à-dire quand l’émetteur et le récepteur sont distants, ces directions radiales correspondent aux directions normales aux ellipses qui représentent les lieux tels que la distance totale parcourue par l’onde EM entre l’émetteur et le récepteur, représentant les foyers de ces ellipses, soit constante2
.
La vitesse des vagues de Bragg dans la direction radiale vBcorrespond alors à la somme de la
vitesse de la vague de Bragg en l’absence de courant et de la vitesse du courant dans la direction
2. Nous noterons que le cas monostatique est un cas particulier du cas bistatique pour lequel les foyers sont colocalisés et les ellipses correspondent alors à des cercles.
16 Chapitre 1. Le radar courantométrique
radiale vr :
vB= v0B+ vr (1.4)
En utilisant la relation entre le décalage Doppler et la vitesse de déplacement, nous en déduisons
vr= λfB
∆
2 (1.5)
Une vitesse radiale positive indique que le courant est dirigé vers l’intérieur des ellipses.
Cette vitesse radiale, effectivement mesurée par le radar, correspond à la quantité définie par
vr = 2k
Z 0
−∞
v(z).erexp(2kz)dz (1.6)
où v représente le courant total et k = 2π
λ est le nombre d’onde de l’onde EM émise par le radar (Stewart and Joy,1974;Ha,1979). Cette relation est établie, pour un profil vertical quelconque de vitesse, en se basant sur la théorie des vagues du premier ordre et les principales hypothèses formulées sont les suivantes :
– la hauteur des vagues est faible devant leur longueur d’onde ;
– la longueur d’onde des vagues est faible devant la profondeur (eaux profondes) ; – la vitesse est constante sur un plan horizontal et à l’échelle de temps considérée ; – la vitesse est faiblement cisaillée sur la verticale.
Ainsi, la vitesse radiale effective dépend fortement du profil de courant. En considérant un profil linéaire,Stewart and Joy(1974) ont montré que la vitesse radiale effective correspond à la vitesse radiale à une profondeur DR =
λ
8π. Alors la vitesse radiale effective correspond à la projection du courant total à cette profondeur sur la direction radiale et s’exprime par le produit scalaire
vr = v(z = λ
8π).er (1.7)
Cette valeur est souvent retenue dans les applications grâce à sa simplicité et parce qu’elle donne une bonne estimation de la vitesse radiale pour un profil monotone. Pour tenir compte de profils non monotones, certains auteurs considèrent que la vitesse radiale correspond à l’intégrale de la vitesse sur la couche de sub-surface comprise entre la profondeur λ
8π et la surface (e.g. Ivonin
et al.,2004).
Il faudra garder à l’esprit que ces valeurs sont obtenues en formulant des hypothèses qui pourront être trop restrictives, en particulier en cas de cisaillement important. Ce point fait toujours l’objet de travaux de recherche.
1.1.2 Les différents systèmes de radar courantométrique
Le développement des systèmes d’observation HFR n’a commencé que dans les années 1970 avec le développement aux Etats-unis par la NOAA3
du système CODAR4
(Barrick,1977), un
3. National Oceanic and Atmospheric Administration 4. Coastal Ocean Dynamics Application Radar
1.1 Généralités sur les radars courantométriques 17
système compact dont le SeaSonde (Paduan and Rosenfeld,1996) est l’aboutissement commercial. Mais ce principe a été également été repris au Royaume-Uni avec l’OSCR5
(Prandle and Ryder,
1985) ou en Allemagne (Gurgel et al., 1986). D’autres systèmes ont également été développés comme le COSMER6
(Broche et al.,1987) en France principalement utilisé en VHF, le C-CORE (Ponsford et al., 2001) au Canada, le PISCES (Shearman and Moorhead, 1988) au Royaume-Uni, le WERA7
(Gurgel et al.,1999a) en Allemagne, le COSRAD8
(Heron,1985) en Australie, l’OSMAR9
(Hou et al., 1997) en Chine et d’autres systèmes ont également été développés au Japon. Récemment, Fujii et al. (2013) ont présenté une revue des différents réseaux HFR en activité en Asie et en Océanie. Notons qu’aux Etats-Unis, l’Université de Hawaï développe un système de type WERA (http://www.satlab.hawaii.edu/wiki/) principalement destiné aux
pays émergents grâce à son faible coût de construction.
L’utilisation des HFR embarqués à bord des navires a également été réalisée pour la mesure des courants de surface (Gurgel and Essen,2000).
Ces systèmes se distinguent principalement par le type d’antennes de réception utilisé (qua-dripôle, antenne boucle ou réseau linéaire d’antennes), le type de signal émis (principalement "Continuous Wave" (CW), "Frequency Modulated Constinuous Wave" (FMCW)) et les traite-ments effectués sur les signaux. Ces caractéristiques permettent notamment de définir les réso-lutions angulaires et radiales des vitesses mesurées par les radars.Gurgel et al.(1999b) effectue une étude présentant les limitations imposées par les traitements utilisés par ces systèmes radar. Parmi ces systèmes, les radars commerciaux WERA et SeaSonde se distinguent particuliè-rement (Tab. 1.1). Grâce à son faible encombrement, le SeaSonde peut être déployé dans des endroits où l’espace disponible est limité et même avec un délai très court en cas d’accident ma-ritime (Kjelaas and Whelan, 2011; Barrick et al., 2012). Le WERA présente un encombrement supérieur. Dans sa version standard, le réseau de réception est linéaire. Cependant des géométries non linéaires ont également été adoptées avec succès pour réduire l’emprunte au sol du réseau d’antenne de réception (e.g. Section 1.2). Les dispositions notoirement différentes des antennes SeaSonde et WERA amènent à des traitements du signal différents, le SeaSonde faisant appel à un traitement en direction d’arrivée et le WERA typiquement (mais non exclusivement) à un traitement en formation de voie. Ces traitements sont expliqués de manière succincte en section
1.1.3. Une comparaison de ces deux systèmes est effectuée par Gurgel et al. (1999a) et Essen et al.(2000).
1.1.3 Liens entre le traitement des signaux mesurés par radar et la résolution
des vitesses radiales
Les différents systèmes de HFR permettent d’obtenir des vitesses radiales, issues du traitement des signaux EM rétro-diffusés par une certaine surface de mer. Ces traitements définissent les résolutions spatiales de cette surface et la précision avec laquelle la vitesse radiale sera mesurée. Pour les applications océanographiques, il est essentiel de comprendre les caractéristiques des
5. Ocean Surface Current Radar
6. Courants Océaniques de Surface MEsurés par Radar 7. WEllen RAdar
8. Coastal ocean Radar
18 Chapitre 1. Le radar courantométrique
vitesses radiales. Intéressons nous alors aux résolutions qui dérivent des traitements appliqués.
Résolution azimutale
Le traitement angulaire est nécessaire pour identifier la zone de la surface de mer qui rétro-diffuse l’information, vu que l’onde reçue par le réseau de réception provient de toutes les direc-tions. Deux méthodes sont utilisées.
Le traitement par direction d’arrivé ("Direction Finding" DF, e.g. Barrick and Evans,1979), par exemple avec l’algorithme MUSIC ("MUltiple SIgnal Caracterization",Schmidt,1986), per-met de déterminer les directions de provenance des échos en comparant les phases et les ampli-tudes des ondes reçues par les différents monopoles du réseau de réception. Le DF permet de rendre les systèmes compacts car il peut être utilisé avec des réseaux de petite taille, typiquement 4 monopoles disposés en carré, dont la diagonale est au plus égale à λ/2 pour les CODAR, dont l’évolution SeaSonde n’utilise plus que des antennes boucles orthogonales pour la réception. Ce traitement est également applicable sur des réseaux avec un plus grand nombre de monopoles, comme avec les WERA.
La formation de voie ("Beam Forming" BF) s’appuie sur la théorie des antennes. Des pon-dérations adaptées sont appliquées sur les signaux reçus par chaque antenne de façon à former un lobe directionnel qui permet de sélectionner au mieux les signaux provenant d’une direction donnée. L’augmentation du nombre d’antennes permet d’améliorer la résolution angulaire. Les réseaux d’antennes sont souvent des réseaux linéaires dont les antennes sont séparées d’une demi longueur d’onde de l’onde émise. Ainsi l’espace au sol devient vite important ce qui limite leur installation en milieu côtier.
Des comparaisons entre les algorithmes BF et DF, basées sur l’utilisation de WERA et de CODAR/Seasonde, ont été réalisées dans différentes études (e.g. Gurgel et al., 1997, 1999b;
Essen et al., 2000; Sentchev et al., 2011). Le principale avantage du DF est qu’il peut utiliser un réseau de réception faiblement étendu (typiquement avec un diamètre ≤ λ/2 pour éviter les ambiguïtés) mais n’est approprié que pour la mesure des courants. Le BF nécessite un réseau de réception disposé linéairement et plus étendu (typiquement 8λ), mais permet également la mesure du spectre des vagues de surface. Pour un même réseau de réception, l’utilisation du DF permet d’obtenir une meilleur description des structures de petites échelles, mais présente un plus grand nombre de fausse alarmes.
Par ailleurs, la connaissance du diagramme de rayonnement des antennes, qui dépend du réseau et de l’environnement EM, est primordiale de manière à pouvoir identifier avec précision les directions d’où proviennent les signaux rétro-diffusés.
Résolution radiale
Le traitement radial (ou en distance) est défini par le type de signal émis. Ils peuvent être de type pulsé à fréquence continue (CW, Continuous Wave) comme pour le SeaSonde. La résolution radiale ∆R, tenant compte du trajet aller/retour, est alors liée à la durée de l’impulsion τ par la relation
∆R = cτ
1.1 Généralités sur les radars courantométriques 19
avec c la célérité de la lumière dans le vide. La durée des impulsions permet d’obtenir la portée non ambiguë du radar, ∆R.
Les signaux émis peuvent également être des chirps modulés en fréquence émis en continu (FMCW, Frequency Modulated Continuous Wave). C’est le cas du WERA. La fréquence du signal émis augmente linéairement tout au long de l’émission. La résolution radiale est alors liée à la largeur de bande B du signal émis par la relation
∆R = c
2B (1.9)
Notons que ces résolutions radiales sont des résolutions théoriques. Les résolutions effectives sont dégradées par rapport à leur valeur théorique.
Résolution des vitesses radiales
La résolution de la vitesse radiale mesurée dépend directement de la résolution fréquentielle Doppler qui est inversement proportionnelle à la durée de la mesure ∆T , aussi appelée vacation. Ainsi, dans le cas d’un signal de type FMCW, ∆T = Nchirp× ∆t, où ∆t est la durée d’un
chirp et Nchirp le nombre de chirps émis pendant la vacation. Cependant, afin d’augmenter le
rapport signal à bruit lors des traitements fréquentiels, ∆T est découpé en Nvacsous parties. En
procédant ainsi, nous admettons que le phénomène observé est stationnaire sur la durée de la vacation. La résolution fréquentielle est alors multipliée par Nvac. La résolution de la fréquence
Doppler brute est donnée par
δfd= Nvac ∆T = Nvac Nchirp× ∆t (1.10) Nous en déduisons la résolution de la vitesse radiale en utilisant la relation qui lie la fréquence Doppler à la vitesse de déplacement :
δvr = λ
2δfd (1.11)
Ainsi, la résolution de la vitesse radiale dépend uniquement de la longueur d’onde du radar et de la durée de la mesure.
Ces résolutions sont des résolutions minimales, qui pourront augmenter en fonction de la stratégie de traitement de signal adoptée (fenêtre de pondération, chevauchement temporel des échantillons...).
À noter
La précision de la vitesse obtenue à partir de l’Eq.1.11 repose sur des considérations élé-mentaires de durée du signal. Il existe aussi d’autres sources d’incertitude, plus ou moins bien quantifiées, dues par exemple aux différentes échelles présentes dans la surface participant à la rétrodiffusion, aux interactions vagues-courants ou à la profondeur effective du courant. La va-lidation des mesures des courants de surface sur le terrain n’est pas évidente compte tenu du fait que ces courants représentent en réalité une quantité intégrée sur une certaine surface et une certaine couche. Différentes méthodes ont été utilisées pour quantifier l’erreur sur la mesure comme la comparaison avec des trajectoires de flotteurs de surface (e.g. Ohlmann et al.,2006;
20 Chapitre 1. Le radar courantométrique
Shadden et al., 2009; Kuang et al., 2012) ou avec des ADCP (e.g. Graber et al., 1997;Nadai et al.,1997,1999;Teague et al.,2001;Le Boyer et al.,2009).
1.1.4 Principales applications des radars courantométriques
La principale application de la radio-océanographie par HFR est la mesure du courant de surface dans la bande côtière permettant d’effectuer des mesures en continu sur une zone étendue. En fonction de la bande de fréquence utilisée (VHF ou HF), les portées s’étendent de 20 km à plus de 100 km avec des résolutions spatiales relativement fines (O(100m − 1km)) avec un échantillonnage temporel haute fréquence (jusqu’à une carte toutes les 20 minutes).
De nombreux processus océaniques, présents en zone côtière, répartis sur une large gamme de fréquences spatiales et temporelles (subméso-échelle à synoptique), peuvent alors être étudiés à partir des radars. Nous pouvons citer en particulier :
– l’analyse des signaux de marée (e.g.Broche et al.,1986b;Prandle,1991;Kaplan et al.,2005;
Sentchev et al.,2011) ;
– l’analyse ou la détection de processus de méso-échelle comme des fronts, des méandres (Guihou et al.,2013) ou des tourbillons (Allou et al.,2010;Kim,2010;Nencioli et al.,2010;
Marmain et al.,2011;Schaeffer et al.,2011b) ;
– l’étude de la propagation d’onde en milieu côtier comme des ondes d’inertie (Rubio et al.,
2011) ;
– l’estimation de la variation de la hauteur de la surface de la mer (Marmorino et al.,2004) ; – l’étude de la divergence et du rotationnel du courant de surface (Kim et al.,2007) ;
– la variabilité à différentes échelles des courants côtiers (Kim et al.,2011) ; – la quantification des échanges côte-large ;
– les panâches des rivières (Forget et al.,1990;Broche et al.,1998) ; – les courants induits par le vent (Broche et al.,1983,1986a) ;
– le transport lagrangien de surface (Molcard et al.,2009; Shadden et al.,2009;Haza et al.,
2010;Uttieri et al.,2011) ;
– l’extraction des paramètres de l’état de mer (Forget,1985;Lipa and Barrick,1986). L’assimilation de ces données dans les modèles connaît également un essor important de-puis ces dernières années (c.f. chap. 4). Elles peuvent également être utilisées, comme données indépendantes, pour la validation des résultats de simulations numériques
– de modèle de circulation (e.g. Guihou et al.,2013;Schaeffer et al.,2011b) ; – d’assimilation de données (Li et al.,2008),
– de marée (Broche et al.,1986b;Davies et al.,2001) – de vagues (Wyatt et al.,2003).
Les mesures radars peuvent également être utilisées conjointement avec des mesures in situ, permettant d’obtenir une description plus complète de l’état de l’océan. De ce point de vue, cette thèse est associée aux travaux de Guihou et al. (2013), qui étudie un méandre du CN en utilisant des données de HFR, des données de télédétection satellitale, des mesures in situ et des simulations numériques. Elle est également associée aux travaux de Bellomo et al. (2013), qui étudie la situation hydrologique et dynamique dans le CN en se basant sur les données de HFR et des données mesurées par CTD (Conductivity-Temperature-Depth) et gliders. La correction de
1.1 Généralités sur les radars courantométriques 21
champs de vitesse eulériens issues des HFR ou de simulations numériques à partir des trajectoires de flotteurs de surface avec l’algorithme LAVA (LAgrangian Variational Analysis) fait également l’objet de travaux en cours (Berta et al.,2013).
Les mesures par HFR ont également des applications opérationnelles comme la détection d’inondation, de tsunami (Barrick and Evans,1979;Lipa et al.,2006,2011;Gurgel et al.,2011), mais aussi la prédictibilité lagrangienne (Yaremchuk et al.,2013) ou les prévisions à court terme des courants de surface côtiers (Zelenke,2005;Frolov et al.,2012;Barrick et al.,2012) appliquée aux opérations de recherche et sauvetage (search and rescue) ou au transport et au devenir d’ob-jets flottants à la surface de la mer comme les polluants (Abascal et al.,2009,www.tosca-med.eu)
ou les icebergs (Haykin et al.,1994).
D’autres applications utilisant les HFR sont également possibles, liées à l’environnement ma-rin (transport biologique, gestion de la pêche, surveillance de la qualité des eaux), à l’activité anthropique en mer (gestion des ports, industries, plate-formes en mer, énergies renouvelables), à l’extraction du champ de vent de surface (Shen et al.,2012), à la détection de cible de surface (Grosdidier,2010;Roarty et al.,2011) et également toutes les autres applications atmosphériques possibles qui ne seront pas détaillées dans ce document.
1.1.5 Répartition des radars courantométriques à travers le monde
Les applications des HFR sont nombreuses et ont lieu dans différents endroit du monde. Il est intéressant de s’intéresser à la répartition des HFR dans le monde. L’initiative récente GeoGlobalHFradar10 a permis d’obtenir, de la part des pays y participant, des informations sur la localisation et le type de radar installé. Un récapitulatif est donné dans le tableau 1.1. Bien qu’encore incomplet par rapport aux différents systèmes installés connus (e.g. radar de l’université de Hawaï, WERA de Grèce, SeaSonde de Malte, OSMAR de Chine ...), le tableau montre que l’observation par HFR est très inégalement répartie, principalement située le long des côtes des Etats-Unis, de la Corée du Sud, du Japon, de Taïwan et de l’Espagne. Nous constatons également que le nombre de HFR de type SeaSonde CODAR est largement supérieur au nombre de HFR de type WERA en opération.
Toujours en se basant sur cette base de données, la répartition géographiques des HFR des pays méditerranéens est représentée sur la Fig.1.2. Nous constatons que le bassin occidental de la Mer Méditerranée a fait l’objet d’un effort d’observation plus important que le bassin oriental. Pour compléter cette carte nous pouvons évoquer l’installation des HFR maltais dans le cadre du projet CALYPSO11
permettant d’obtenir des mesures de courant de surface dans le canal de Malte, et des HFR grecques permettant de mesurer les courants de surface à l’entrée du détroit des Dardanelles.
Notons également que les HFR sont souvent installés pour des campagnes ponctuelles (e.g.
Molcard et al.,2009, MREA2007, 15 jours de mesure).
10. https://siomail.ucsd.edu/mailman/listinfo/geo.global.hfradar
22 Chapitre 1. Le radar courantométrique
Table 1.1 – Inventaire des radars en fonctionnement à l’échelle globale réalisé par l’initiative GeoGlobalHFradar. Mis à jour en juin 2013.
Pays CODAR WERA
Australie 4 8
Brésil 2 0
Chine 4 0
Corée du Sud 23 2
Emirats Arabe Unis 2 0
Espagne 16 0 Etats-Unis 115 10 France 0 4 Inde 10 0 Indonésie 2 0 Irelande 2 0 Israël 2 0 Italie 3 0 Japon 22 0 Jordanie 1 0 Mexique 1 0 Norvège 2 0 Portugal 2 0 Russie 1 0 Taïwan 15 0 Thaïland 6 0 Vietnam 3 0
Figure 1.2 – Position des stations HFR en Méditerranée référencées dans la base de données GeoGlobalHFradar (points rouges). Mis à jour en juin 2013.
1.1 Généralités sur les radars courantométriques 23
1.1.6 Implication des radars courantométriques pour l’étude de la circulation
le long des côtes françaises
Le LSEET (Laboratoire de Sondage Electromagnétique de l’Environnement Terrestre), intégré au MIO (Institut Méditerranéen d’Océanologie) depuis 2012, a été précurseur en France dans le développement, l’installation et l’utilisation des systèmes radars courantométriques depuis la fin des années 1970 et plus récemment leur maintien en conditions opérationnelles.
L’espace côtier disponible en France est réduit par la présence de côtes escarpées et du fait d’une densité de population élevée, ce qui est notamment le cas sur la côte d’Azur. Par ailleurs, pour limiter les coûts, les systèmes d’observation ont souvent été mis en place pour des durées limitées associées à des campagnes de mesures dans le cadre de projets scientifiques. Les campagnes de mesure par radar HF/VHF menées par le LSEET/MIO ainsi que les pro-grammes associés sont résumés dans le tableau1.2et un historique pourra être trouvé sur le site
http://hfradar.univ-tln.fr/HFRADAR/squel.php?content=Historique.php.
En France, l’utilisation des HFR a pris un nouvel essor depuis une dizaine d’années. Actuel-lement, deux systèmes sont opérationnels. Un système est installé en mer d’Iroise dans le cadre du projet VIGICOTE12
piloté par le SHOM13
. Il permet, en plus des observations de courant de surface en Mer d’Iroise, d’établir des cartes de vent de surface, de hauteurs significatives des vagues, et donnent également le spectre directionnel des vagues pour une cellule de mesure14
. Un second système, installé sur les côte varoises, est décrit en section1.2. Un autre système est prévu d’être installé prochainement sur la côte d’Azur et pourra compléter le réseau MOOSE15 visant à mettre en place un système d’observation de la Méditerranée Nord Occidentale.
12. http://www.shom.fr/fr_page/fr_act_oceano/vagues/VIGICOTE/
13. Service Hydrographique et Océanographique de la Marine
14. http://www.previmer.org/observations/courants/radar_hf_iroise
24 Chapitre 1. Le radar courantométrique
Table 1.2 – Campagnes de mesure par radar HF/VHF menées par le LSEET/MIO ainsi que les programmes associés. Mise à jour de "Radar activities in ocean-atmosphere at LSEET, 2008"
Place Date Programme RADAR
Mer du Nord Automne
1979 MARSEN (International) 1 HF Baie de Hyères 1976-79 1 HF Camargue Mars 1981 1 HF Camargue Nov. 1981 2 HF
Baie de Seine Sept.-Oct. 1982 GRECO Manche (National) 2 HF Etang de Berre, La Ciotat Fev.-Mars 1985 1 VHF
Rhône Jan. 1989 FRONTAL
(National) 1 VHF
Rhône 1991 EROS 2000 (UE) 1 VHF COSMER
Rhône Nov. 1994 MEDDELT (UE) 2 VHF COSMER
Baie de Hyères Nov. 1997 2 VHF COSMER
Rhône Fev. 2000 1 VHF COSMER
Baie de Toulon Juin 2002 2 VHF COSMER
Golfe Normand Breton Fév.-Mars 2003 EPEL-GNB (National) 2 VHF COSMER
Pas-de-Calais Mai-juin 2003 PNEC Phaeosystis
(National) 2 VHF COSMER
Golfe du Lion Mai 2005 -Fév. 2007
PATOM, PNEC, ECOLO (National)
2 HF WERA
Golfe de La Spezia Juin 2007 MREA/LASIE 2 VHF WERA
Côtes Provençales depuis mai 2010 ECCOP, TOSCA, MOOSE 1 HF mono-statique 1 HF bi-statique WERA
1.2 Traitement et validation des courants de surface mesurés par radar HF au large des côtes
varoises 25
1.2 Traitement et validation des courants de surface mesurés par
radar HF au large des côtes varoises
5 5.5 6 6.5 7 7.5 42.6 42.8 43 43.2 43.4 43.6 Longitude (deg E) Latitude (deg N) −100 −500 −1000 −1500 −2000 −2500 −2500 −100 −500 −1000 −1500 −2000 Toulon Nice Marseille Ile de Poquerolles Cap Sicie Cap Benat CEP HYE POR LEV
Figure 1.3– Description de la zone des côtes varoises. Les sites où sont installés les radars sont en rouge. Les stations météorologiques sont en bleu. Les villes sont en noir. Les côtes varoises sont tracées en vert. Les isobathes -100, -500, -1000, -2000 et -2500 m sont représentées en gris.
1.2.1 Le système d’observation par radar HF sur les côtes varoises
L’installation de ce système a commencé en mai 2010 avec l’équipement de la station mono-statique située au fort Peyras sur le cap Sicié (Fig.1.3, 1.5(a)), dénommée PEY dans la suite. Il s’agit d’un radar WERA consistant en un réseau d’émission à deux antennes et un réseau de réception à 8 antennes disposées en quinconce pour pallier au manque de place disponible pour l’installation d’un tel réseau. Notons que la proximité des réseaux d’émission et de récep-tion (∼100 m) et l’environnement électromagnétique défavorable (présence de masses métalliques importantes, interférences) ont obligé à un effort important pour le traitement des signaux de manière à disposer de cartes de vitesses radiales exploitables. Grace à la disponibilité d’un site proche, le réseau d’émission a pu être éloigné du réseau de réception en mars 2013 de façon à réduire les couplages entre antennes. La distance entre les deux réseaux, de l’ordre de 500 m, permet de considérer ce système comme monostatique. Cette station a fonctionné seule pendant près d’un an et demi, nous conduisant à développer des méthodes pour exploiter ces données, par nature incomplète pour décrire totalement le courant de surface (section 1.3, Marmain et al.,
2011, et chap. 3.1-3.2).
L’évolution de la couverture spatiale sur la période du 21 mai 2010 au 30 juin 2013 est montrée sur la Fig.1.4(haut) et représente la proportion à chaque instant des points disponibles
26 Chapitre 1. Le radar courantométrique
par rapport au nombre total de points à l’intérieur d’une zone prédéterminée, représentée sur la Fig.1.5(a). Ce masque, construit arbitrairement, permet d’éliminer les zones où la présence de données aberrantes est connue (e.g. terre ou zone à faible couverture). Les fluctuations de la couverture sont dues à une forte sensibilité du système à la vitesse du vent, causée par des couplages EM complexes. Le taux de couverture diminue quand la vitesse du vent augmente (non montré), conduisant à une mauvaise observation du courant de surface par épisode de vent fort. La distribution spatiale de la couverture temporelle, calculée sur la même période, montre que la zone côtière située jusqu’à 50 km de PEY est couverte par les observations radar plus de 50% du temps.
Le second système a été installé en novembre 2011. Il s’agit d’un système bistatique dont le réseau d’émission est celui de PEY et le réseau de réception est un système WERA de 8 antennes linéaires installé au sémaphore du cap Bénat (Fig.1.5(b)). Ce système est dénommé BEN dans la suite. Les couvertures spatiale et temporelle sont montrées sur les Fig.1.4 (milieu) et1.5(b), respectivement. Bien qu’à cause du masque représenté par les îles d’Or qui ne permet d’observer les vitesses de surface qu’à travers la passe située entre l’île de Porquerolles et l’île de Port Cros, la zone de couverture à 50% s’étend à plus de 50 km au Sud et les couvertures spatiales sont le plus souvent supérieures à 60% de l’étendue du masque.
Les vitesses radiales mesurées par PEY et BEN ont fait l’objet d’une combinaison pour l’ob-tention de carte de courants vectoriels de surface (Cf. section 1.2.3.2). La géométrie du système PEY/BEN est représentée sur la Fig.1.6(a). Dans l’annexe D nous expliquons comment des erreurs sur les vitesses vectorielles peuvent être amplifiées à cause de la dilution de précision géométrique (GDOP) dépendant de l’angle entre les directions radiales. Généralement, il est considéré que les vitesses vectorielles situées dans des zones où les angles entre les radiales sont compris entre 30˚et 150˚, ou de manière équivalente où la GDOP est inférieure à 2.5, contiennent des erreurs acceptables. La surface grise de la Fig. 1.6(a) représente cette zone. La zone où les vitesses vectorielles peuvent être calculées apparaît relativement faible par rapport aux zones de couverture des vitesses radiales. Elle s’étend sur une surface de moins de 30×30 km, limitant l’observation du CN.
L’installation d’un réseau d’émission sur l’île de Porquerolles au mois de mai 2012 à permis d’améliorer nettement la zone de couverture vectorielle. Ce réseau d’émission, constitué d’une antenne, couplé au réseau de réception du cap Bénat constitue un système bistatique qui sera dénommé POB (Porquerolles-Bénat) par la suite (Fig.1.5(c)). Les cartes de couvertures spatiales et temporelles pour la période du 24 mai 2012 au 30 juin 2013 sont présentées sur les Fig.1.4(bas) et1.5(c). Bien que le masquage des îles soit toujours présent, l’extension spatiale de la couverture est nettement améliorée par rapport à BEN. Les couvertures sont supérieures à 50% jusqu’à 60 km de l’île de Porquerolles et de 20 à 50 % derrière les îles
Ainsi la configuration PEY/POB qui fonctionne avec un mode innovant de synchronisation par GPS, permet de mesurer des vitesses radiales qui après combinaison permettent d’obtenir des cartes de courants vectoriels de surface sur une zone d’environ 50×50 km, bien plus étendue que dans la configuration PEY/BEN (Fig.1.6(b)).
Les principales étapes des installations sont récapitulées dans le Tab.1.3 et permettent d’ex-pliquer l’absence de données sur la Fig.1.4. Notons qu’une autre configuration constitué d’un
1.2 Traitement et validation des vitesses radar HF 27
réseau d’émission situé au fort de Brégançon (∼ 2 km à l’Ouest du cap Bénat) couplé aux ré-seaux de réception du fort Peyras (BTP) et du cap Bénat (BTB) a été testée mais non retenue, les mesures étant de moins bonne qualité.
Table1.3 – Principales étapes de l’installation des réseaux d’émission (TX) et de réception (RX) des radars HF sur la côte varoise. Mis à jour en juin 2013.
Date Description
21/05/2010 Installation TX/RX PEY
21/05/2010 - 15/11/2011 PEY seul
15/11/2011 Installation RX BEN
15/11/2011 - 23/05/2012 PEY + BEN
30/11/2011 - 06/12/2011 Test TX Brégançon-RX BEN (BTB) 02/12/2011 - 06/12/2011 Test TX Brégançon-RX PEY (BTP)
24/05/2012 Installation TX Porquerolles
24/05/2012 - aujourd’hui PEY + POB
04/10/2012 - 21/11/2012 coupure PEY pour entretien
13/03/2013 Déplacement TX PEY à Amphitria
2010 2011 2012 2013
POB BEN PEY
Figure 1.4 – Évolution temporelle des couvertures spatiales pour les stations PEY (haut), BEN (milieu) et POB (bas). Les points bleus indiquent les valeurs de couverture à un instant donné. Les points rouges représentent des couvertures nulles.