Pour l'obtention du grade de
DOCTEUR DE L'UNIVERSITÉ DE POITIERS UFR des sciences fondamentales et appliquées
XLIM-SIC
(Diplôme National - Arrêté du 25 mai 2016)
École doctorale : Sciences et ingénierie pour l'information, mathématiques - S2IM (Poitiers) Secteur de recherche : Electronique, microélectronique et nanoélectronique
Présentée par : Jérémy Hyvert
Techniques de conception d'oscillateurs contrôlés en tension à très faible bruit de phase en bande Ku intégrés
sur silicium en technologie BiCMOS
Directeur(s) de Thèse : Jean-Marie Paillot, David Cordeau Soutenue le 22 septembre 2016 devant le jury Jury :
Président Michel Prigent Professeur des Universités, Université de Limoges Rapporteur Jean-Baptiste Begueret Professeur des Universités, Université de Bordeaux Rapporteur Philippe Descamps Professeur des Universités, ENSI de Caen
Membre Jean-Marie Paillot Professeur des Universités, Université de Poitiers Membre David Cordeau Maître de conférences, Université de Poitiers Membre Florin Hutu Maître de conférences, INSA de Lyon
Membre Pascal Philippe Ingénieur, NXP Semiconductors, Caen
Pour citer cette thèse :
Jérémy Hyvert. Techniques de conception d'oscillateurs contrôlés en tension à très faible bruit de phase en bande
Ku intégrés sur silicium en technologie BiCMOS [En ligne]. Thèse Electronique, microélectronique et
pour l’obtention du Grade de
D
OCTEUR DE L
’U
NIVERSITÉ DE
P
OITIERS
FACULTÉ DES SCIENCES FONDAMENTALES ET APPLIQUÉES
Diplôme National – Arrêté du 7 août 2006
ÉCOLE DOCTORALE :SCIENCES ET INGÉNIERIE POUR L’INFORMATION, MATHÉMATIQUES (S2IM)
SECTEUR DE RECHERCHE : ÉLECTRONIQUE, MICROÉLECTRONIQUE ET
NANOÉLECTRONIQUE
P
RÉSENTÉE PAR:
J
ÉRÉMYHYVERT
************************
T
ECHNIQUES DE CONCEPTION D
’
OSCILLATEURS
CONTRÔLÉS EN TENSION À TRÈS FAIBLE BRUIT DE
PHASE EN BANDE
K
U INTÉGRÉS SUR SILICIUM EN
TECHNOLOGIE
B
I
CMOS
************************
DIRECTEUR DE THÈSE :JEAN-MARIE PAILLOT
CO-ENCADRANT :DAVID CORDEAU
************************
Soutenue le 22 septembre 2016 devant la Commission d’examen ************************
JURY
Jean-Baptiste BÉGUERET Professeur à l’Université de Bordeaux Rapporteur
Philippe DESCAMPS Professeur à l’ENSICAEN Rapporteur
Florin HUTU Maître de conférences à l’INSA Lyon Examinateur
Michel PRIGENT Professeur à l’Université de Limoges Examinateur
Pascal PHILIPPE Ingénieur, NXP Semiconductors, Caen Examinateur
pour l’obtention du Grade de
D
OCTEUR DE L
’U
NIVERSITÉ DE
P
OITIERS
FACULTÉ DES SCIENCES FONDAMENTALES ET APPLIQUÉES
Diplôme National – Arrêté du 7 août 2006
ÉCOLE DOCTORALE :SCIENCES ET INGÉNIERIE POUR L’INFORMATION, MATHÉMATIQUES (S2IM)
SECTEUR DE RECHERCHE : ÉLECTRONIQUE, MICROÉLECTRONIQUE ET
NANOÉLECTRONIQUE
P
RÉSENTÉE PAR:
J
ÉRÉMYHYVERT
************************
T
ECHNIQUES DE CONCEPTION D
’
OSCILLATEURS
CONTRÔLÉS EN TENSION À TRÈS FAIBLE BRUIT DE
PHASE EN BANDE
K
U INTÉGRÉS SUR SILICIUM EN
TECHNOLOGIE
B
I
CMOS
************************
DIRECTEUR DE THÈSE :JEAN-MARIE PAILLOT
CO-ENCADRANT :DAVID CORDEAU
************************
Soutenue le 22 septembre 2016 devant la Commission d’examen ************************
JURY
Jean-Baptiste BÉGUERET Professeur à l’Université de Bordeaux Rapporteur
Philippe DESCAMPS Professeur à l’ENSICAEN Rapporteur
Florin HUTU Maître de conférences à l’INSA Lyon Examinateur
Michel PRIGENT Professeur à l’Université de Limoges Examinateur
Pascal PHILIPPE Ingénieur, NXP Semiconductors, Caen Examinateur
R
EMERCIEMENTS
Ce travail a été effectué dans le cadre d’une collaboration entre le laboratoire XLIM (équipe RESYST de l’IUT d’Angoulême) et la société NXP Semiconductors située à Caen. J’adresse donc en premier mes remerciements à Monsieur Pascal PHILIPPE, ingénieur chez NXP Semiconductors, qui m’a accueilli au sein de cette société, accordé sa confiance et qui m’a apporté son expertise et son soutien tout au long de cette thèse.
Je tiens également à remercier monsieur le Professeur Dominique BAILLARGEAT, directeur du laboratoire XLIM, de m’avoir accueilli au sein de son laboratoire sur le site d’Angoulême.
J’adresse plus particulièrement mes plus sincères remerciements à Monsieur le Professeur Jean-Marie PAILLOT et Monsieur David CORDEAU, respectivement directeur de thèse et co-encadrant de thèse, pour leur confiance, leur très grande disponibilité, leurs conseils et la qualité de leur encadrement.
Je tiens à exprimer mes sincères remerciements à Messieurs les Professeurs Jean-Baptiste BÉGUERET et Philippe DESCAMPS, qui ont accepté la responsabilité de juger ce travail en qualité de rapporteurs.
Je témoigne ma reconnaissance à Monsieur Florin HUTU, qui a accepté d’examiner ce mémoire et de participer à ce jury.
J’exprime mes remerciements à Messieurs les Professeurs Michel PRIGENT et Jean-Christophe NALLATAMBY ainsi que Monsieur Sylvain LAURENT, pour l’accueil qu’ils m’ont réservé dans les locaux du laboratoire XLIM à Brive afin de réaliser les mesures de bruit de phase des O.C.T. dans les meilleures conditions.
J’exprime également mes remerciements à Monsieur Dominique LESENECHAL pour l’assistance qu’il m’a portée lors de la caractérisation des O.C.T. au sein du laboratoire LaMIPS à Caen.
Je remercie Monsieur le Professeur Stéphane BILA, de m’avoir accueilli dans les locaux d’XLIM Limoges afin d’utiliser le logiciel ANSYS HFSS pour réaliser des modélisations électromagnétiques.
Je remercie Monsieur Bassem FAHS pour la qualité des discussions scientifiques que nous avons tenues à un point crucial des recherches et sans qui ce travail n’aurait sans doute pas donné les mêmes résultats.
Au sein de la société NXP Semiconductors, je tiens particulièrement à remercier Monsieur Olivier TESSON pour son aide et son expertise lors de l’utilisation de Momentum pour la modélisation électromagnétique des inductances. Je remercie également Monsieur Éric THOMAS pour son aide précieuse lors de la finalisation
des dessins des masques et pour le temps qu’il a passé à les vérifier avant l’envoi en fabrication.
Je remercie l’ensemble des membres de l’équipe de recherche RESYST présents sur le site d’Angoulême pour leur bonne humeur. Je tiens également à témoigner ma reconnaissance aux personnels des départements Génie Électrique et Informatique Industrielle et ainsi que Métiers du Multimédia et de l’Internet de l’IUT d’Angoulême pour leur gentillesse et leur aide. Mes remerciements vont aussi aux doctorants et ex-doctorants présents sur le site d’Angoulême avec qui nous avons passé de bons moments. Je remercie en particulier Monsieur Sébastien SOUBIE d’avoir maintenu à jour les installations informatiques pour que le travail se fasse dans les meilleures conditions possibles.
Je tiens à remercier mes parents Jean-Paul et Martine de m’avoir permis de faire mes études dans de bonnes conditions et de m’avoir préparé de bons petits plats tous les midis pendant les trois années de cette thèse.
Enfin, je remercie ma fiancée Marine qui a su m’apporter un soutien sans faille tout au long de cette thèse.
T
ABLE DES MATIÈRES
Table des illustrations ... vii
Liste des tableaux ... xv
Glossaire ... xvii
Introduction générale ... 1
CHAPITRE I : INTRODUCTION AU TRAVAIL DE RECHERCHE ... 5
1. La théorie des oscillateurs ... 9
1.1. Existence des oscillations ... 10
1.2. Naissance des oscillations ... 11
1.3. Limitations des oscillations ... 11
2. Les sources de bruit électronique ... 11
2.1. Le bruit thermique ... 12
2.2. Le bruit de scintillement ou bruit de Flicker ... 12
2.3. Le bruit de grenaille ou bruit shot ... 13
2.4. Le bruit de génération-recombinaison ... 13
3. Le bruit dans les oscillateurs ... 14
3.1. Phénomène de conversion du bruit ... 16
3.2. Le bruit d’amplitude ... 17
3.3. Le bruit de phase ... 18
3.4. Modélisations du bruit de phase ... 21
3.4.1. Modèle linéaire invariant dans le temps ... 21
3.4.2. Modèle linéaire variant dans le temps ... 23
3.4.3. Conclusion pour le concepteur d’oscillateur ... 27
4. Présentation des différentes structures connues ... 28
4.1. Oscillateur en anneau ... 28
4.2. Oscillateur Colpitts ... 29
4.2.1. Généralités ... 29
4.2.2. Analyse de l’impédance présentée par l’amplificateur ... 30
4.3. Oscillateur à paire croisée ... 31
4.3.1. Généralités ... 31
4.4. Oscillateurs Colpitts « gm-boosted » ... 33
4.4.1. Oscillateur Colpitts « gm-boosted » version 1 ... 34
4.4.2. Oscillateur Colpitts « gm-boosted » version 2 ... 35
5. Performances des O.C.T connus ... 37
5.1. Observations sur la puissance consommée ... 41
5.2. Observations sur la plage de fréquence couverte relative à la fréquence centrale ... 42
5.3. Observations sur le critère de niveau de bruit de phase ... 43
5.4. Observations sur le facteur de mérite FOMT ... 44
5.5. Résumé des performances observées ... 46
6. Conclusion ... 47
7. Références ... 48
CHAPITRE II : ÉTUDES ET CONCEPTIONS D’O.C.T. EN BANDE KU EN TECHNOLOGIE BICMOS SIGE:C 0,25 µm ... 51
1. Cahier des charges pour la réalisation d’un O.C.T. en bande Ku. .... 57
2. Architectures communes aux différents O.C.T. réalisés ... 58
2.1. Choix du résonateur FP1 ... 59
2.1.1. Choix du type de contrôle de la fréquence ... 59
2.1.1.1. Contrôle analogique par varactor MOS ... 59
2.1.1.2. Contrôle analogique par diode varicap ... 60
2.1.1.3. Comparatif et justification du choix ... 61
2.1.2. Choix de l’architecture du résonateur ... 62
2.1.2.1. Architecture différentielle classique ... 62
2.1.2.2. Architecture différentielle “Back-to-back” ... 63
2.1.2.3. Architecture différentielle “Back-to-back” personnalisée .... 65
2.1.2.4. Comparatif et justification du choix de l’architecture par les matrices de conversions ... 66
2.1.2.5. Comparatif et justification du choix de l’architecture utilisée par la simulation... 72
2.1.3. Dimensionnement du résonateur ... 74
2.1.3.1. Dimensionnement du varactor ... 74
2.1.3.2. Dimensionnement des inductances... 76
2.2.1. Structure Colpitts différentielle gm-boosted ... 82
2.2.1.1. Limitations de la structure ... 85
2.2.2. Structure innovante proposée ... 88
2.2.2.1. Étude petit signal de l’architecture ... 89
2.2.2.2. Analyse des formes d’ondes ... 92
2.2.2.3. Comparaison des contributeurs au bruit de phase entre les deux versions ... 95
2.3. Bloc de polarisation FP3 ... 97
2.3.1. Version 1 ... 97
2.3.2. Version 2 ... 101
2.4. Bloc de sortie FP4 ... 102
3. O.C.T. version VCO_A2 ... 104
3.1. Description de la version VCO_A2 ... 104
3.2. Simulations post-layout ... 105
3.2.1. Vérification des conditions de démarrage ... 105
3.2.2. Analyse temporelle ... 106
3.2.3. Analyse PSS-HB/PNOISE en fonction de Vtune... 108
3.2.4. Analyse PSS-HB en fonction de la température ... 110
3.2.5. Analyse PSS-HB pour le calcul du pushing ... 111
3.2.6. Résumé des résultats de simulations ... 113
4. O.C.T. version VCO_A1 ... 113
4.1. Description de la version VCO_A1 ... 113
4.2. Simulations post-layout ... 113
4.2.1. Vérification des conditions de démarrage ... 113
4.2.2. Analyse temporelle ... 114
4.2.3. Analyse PSS-HB/PNOISE en fonction de Vtune... 115
4.2.4. Analyse PSS-HB en fonction de la température ... 117
4.2.5. Analyse PSS-HB pour le calcul du pushing ... 118
4.2.6. Résumé des résultats de simulations ... 119
5. O.C.T. version VCO_A1X2 ... 120
5.1. Description de la version VCO_A1X2 ... 120
5.2. Simulations post-layout ... 121
5.2.2. Analyse PSS-HB/PNOISE en fonction de Vtune... 122
5.2.3. Analyse PSS-HB en fonction de la température ... 124
5.2.4. Analyse PSS-HB pour le calcul du pushing ... 125
5.2.5. Résumé des résultats de simulations ... 126
6. O.C.T. version VCO_A3X2 ... 127
6.1. Description de la version VCO_A3X2 ... 127
6.2. Simulations post-layout ... 129
6.2.1. Analyse temporelle ... 129
6.2.2. Analyse PSS-HB/PNOISE en fonction de Vtune... 131
6.2.3. Analyse PSS-HB en fonction de la température ... 134
6.2.4. Analyse PSS-HB pour le calcul du pushing ... 135
6.2.5. Résumé des résultats de simulations ... 136
7. Conclusion ... 136
8. Références ... 138
CHAPITRE III : DESSIN DES MASQUES ET CARACTÉRISATION EXPÉRIMENTALE DES O.C.T. EN BANDE KU ... 141
1. Dessin des masques ... 145
1.1. O.C.T. version VCO_A1 ... 145
1.1.1. FP1 : résonateur ... 146
1.1.2. FP2 : partie active ... 148
1.1.3. FP3 version 2 : bloc de polarisation ... 149
1.1.4. FP4 : bloc de sortie ... 151
1.2. O.C.T. version VCO_A2 ... 152
1.2.1. FP3 version 1 : bloc de polarisation ... 153
1.3. O.C.T. version VCO_A1X2 ... 155
1.4. O.C.T. version VCO_A3X2 ... 155
2. Caractérisation des O.C.T. ... 157
2.1. O.C.T. version VCO_A1 ... 157
2.1.1. Résultats de mesures ... 160
2.1.2. Résumé des résultats de mesures ... 164
2.2. O.C.T. version VCO_A2 ... 165
2.2.1. Résultats de mesures ... 165
2.3. O.C.T. version VCO_A1X2 ... 170
2.3.1. Résultats de mesures ... 171
2.3.2. Résumé des résultats de mesures ... 176
2.4. O.C.T. version VCO_A3X2 ... 177
2.4.1. Résultats de mesures ... 178
2.4.2. Résumé des résultats de mesures ... 181
3. Investigations menées concernant l’écart de fréquence d’oscillation observé ... 182
3.1. Problème de dispersion sur le wafer de silicium ... 182
3.2. Problème lié à la sensibilité à la lumière du SiGe ... 183
3.3. Problème d’extraction de parasite avec le module ASSURA de Cadence ... 183
3.4. Problème de modélisation EM avec ADS Momentum ... 184
3.5. Pistes ouvertes ... 185
4. Conclusion ... 185
5. Références ... 187
Conclusion générale ... 189
T
ABLE DES ILLUSTRATIONS
Figure I-1 — Exemples de formes d’ondes de signaux périodiques ... 9 Figure I-2 — Système bouclé représentant un oscillateur électrique ... 10 Figure I-3 — Schéma équivalent représentant une source de bruit thermique ... 12 Figure I-4 — Spectre du signal de sortie d'un oscillateur idéal (a) et d'un oscillateur bruité (b) ... 15
Figure I-5 — Représentation du signal bruité à l'aide de vecteurs ... 15 Figure I-6 — Spectre de bruit à l'entrée de l'oscillateur... 16 Figure I-7 — Schématisation du phénomène de conversion de bruit autour de la porteuse ... 17
Figure I-8 — Spectre du signal de l'oscillateur modulé en amplitude ... 18 Figure I-9 — Spectre du signal de l'oscillateur modulé en phase ... 20 Figure I-10 — Spectre simplifié du signal de sortie d'un oscillateur pour la compréhension du bruit de phase ... 21
Figure I-11 — Bruit de phase d’un oscillateur selon le modèle de Leeson ... 23 Figure I-12 — Signal de sortie d’un oscillateur LC excité par une impulsion à deux instants différents ... 24
Figure I-13 — Principe de la modélisation linéaire variant dans le temps .... 25 Figure I-14 — Mécanisme de conversion du bruit autour de la porteuse selon le modèle de Hajimiri et Lee ... 27
Figure I-15 — Représentation d’une cellule à retard ... 28 Figure I-16 — Schéma d’un oscillateur en anneau simple ... 29 Figure I-17 — Oscillateurs Colpitts simplifiés en version base commune (a), collecteur commun (b) et émetteur commun (c) ... 29
Figure I-18 — Schéma petit signal basses fréquences du Colpitts base commune ... 30
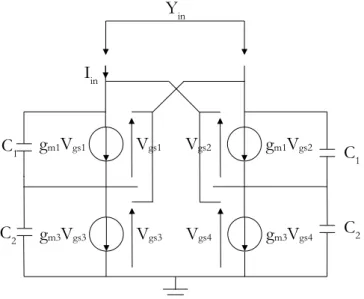
Figure I-19 — Oscillateur à simple paire croisée à transistors bipolaires (a) et MOS (b) ... 32
Figure I-20 — Admittance Yin présentée au résonateur ... 32 Figure I-21 — Schéma petit signal d’un oscillateur à simple paire croisée MOS ... 33 Figure I-22 — Architecture Colpitts « gm-boosted » version 1 ... 34 Figure I-23 — Schéma petit signal de l’architecture Colpitts « gm-boosted » version 1 ... 35
Figure I-24 — Architecture Colpitts « gm-boosted » version 2 ... 36 Figure I-25 — Schéma petit signal de l’architecture Colpitts « gm-boosted » version 2 ... 37
Figure I-26 — Puissance consommée par les O.C.T. recensés dans la Table 1, par famille technologique ... 41
Figure I-27 — Puissance consommée par les O.C.T. avec adaptation de
l’échelle pour la technologie CMOS ... 42
Figure I-28 — Plage de fréquence couverte par les O.C.T. recensés dans la Table 1, par famille technologique, exprimée en pourcentage de la fréquence d’oscillation centrale ... 43
Figure I-29 — Niveau de bruit de phase des O.C.T. recensés dans la Table 1, par famille technologique ... 44
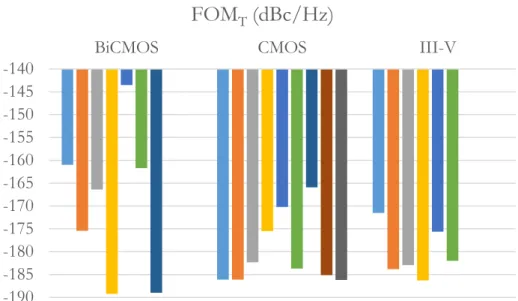
Figure I-30 — Facteur de mérite (FOMT) des O.C.T. recensés dans la Table 1, par famille technologique... 45
Figure II-1— Schéma fonctionnel de l’O.C.T. commun aux quatre versions réalisées... 58
Figure II-2 — Caractéristiques C(V) pour les deux modes ... 59
Figure II-3 — Caractéristique C(VNP) d’un varactor diode ... 61
Figure II-4 — Résonateur LC différentiel à cathode commune ... 63
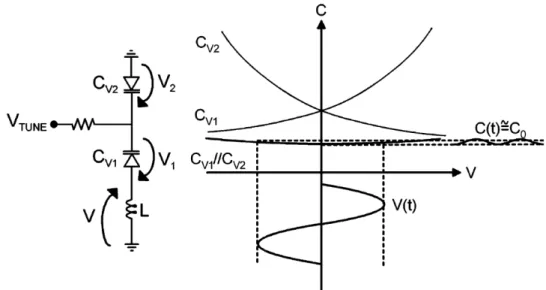
Figure II-5 — Schéma de principe du varactor différentiel « back-to-back »64 Figure II-6 — Schéma du résonateur LC différentiel « back-to-back » pour la compréhension ... 64
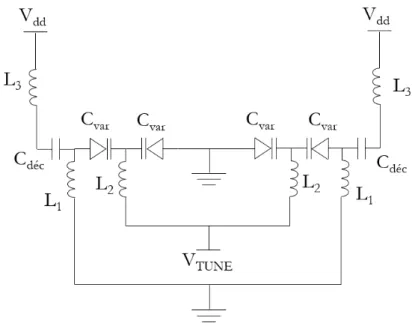
Figure II-7 — Schéma du résonateur LC différentiel « back-to-back » personnalisé ... 65
Figure II-8 — Schéma simplifié du demi-circuit back-to-back ... 70
Figure II-9 — Coefficients de Fourier à l’ordre 0 en fonction de l’amplitude autour du résonateur pour les deux configurations ... 71
Figure II-10 — Coefficients de Fourier à l’ordre 1 en fonction de l’amplitude autour du résonateur pour les deux configurations ... 71
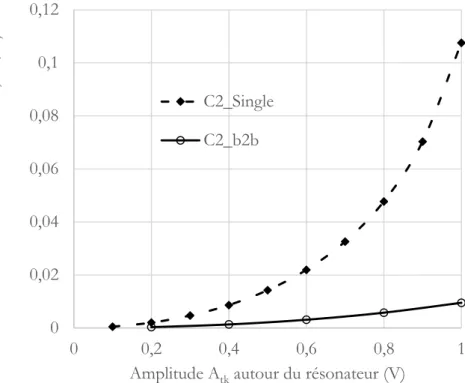
Figure II-11 — Coefficients de Fourier à l’ordre 2 en fonction de l’amplitude autour du résonateur pour les deux configurations ... 72
Figure II-12 — Liste des principales contributions au bruit de phase à 10 kHz de la porteuse pour la configuration cathodes communes (a) et pour la configuration « Back-to-back » (b) ... 73
Figure II-13 — Liste des principales contributions au bruit de phase à 100 kHz de la porteuse pour la configuration cathodes communes (a) et pour la configuration « Back-to-back » (b) ... 74
Figure II-14 — Caractéristique C(Vtune) de la diode varicaps sélectionnée . 75 Figure II-15 — Facteur de qualité de la diode varicap à une fréquence de 15 GHz ... 76
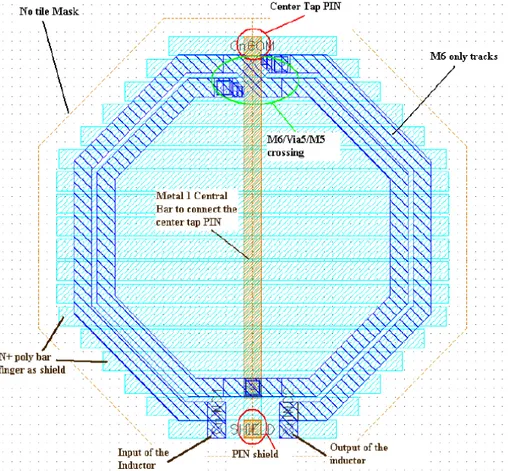
Figure II-16 — Vue layout de l’inductance différentielle octogonale proposée dans la librairie QUBiC4X ... 77
Figure II-17 — Vue en trois dimensions des inductances imbriquées sous Momentum ... 79
Figure II-18 — Valeurs extraites des trois inductances simulées sous Momentum en fonction de la fréquence... 80
Figure II-19 — Valeurs extraites des trois mutuelles inductances simulées sous Momentum en fonction de la fréquence... 80
Figure II-20 — Valeurs extraites des facteurs de qualité des trois inductances simulées sous Momentum en fonction de la fréquence ... 81
Figure II-21 — Valeurs extraites des résistances séries des trois inductances simulées sous Momentum en fonction de la fréquence ... 81
Figure II-22 — Schéma électrique simplifié utilisé pour les simulations sous Cadence ... 82
Figure II-23 — Démarrage des oscillations pour Vtune = 4,5 V ... 83 Figure II-24 — Fréquence d’oscillation en fonction de Vtune ... 84 Figure II-25 — Niveau de bruit de phase en fonction de Vtune pour trois fréquences d’offset (10 kHz, 100 kHz et 1 MHz)... 84
Figure II-26 — Différence de potentiel sur la jonction Vbe du transistor T1 pour Vbt = 3 V ... 85 Figure II-27 — Différence de potentiel sur la jonction Vbc du transistor T1 pour Vbt = 3 V ... 86 Figure II-28 — Différence de potentiel sur la jonction Vce du transistor T1 pour Vbt = 3 V ... 86 Figure II-29 — Différence de potentiel sur la jonction Vce du transistor T1 pour Vbt = 3,5 V ... 87 Figure II-30 — Différence de potentiel sur la jonction Vbc du transistor T1 pour Vbt = 3,5 V ... 88 Figure II-31 — Schéma simplifié de l’architecture innovante ... 89 Figure II-32 — Schéma du demi-circuit (a) et schéma petit signal basses fréquences associé (b) ... 90
Figure II-33 — Différence de potentiel sur les jonctions Vbe, Vbc et Vce du transistor T1 pour Vtune = 4,5 V (en bleu) et Vtune = 1 V (en rouge) ... 92
Figure II-34 — Différence de potentiel sur les jonctions Vbe, Vbc et Vce du transistor T2 pour Vtune = 4,5 V (en bleu) et Vtune = 1 V (en rouge) ... 93
Figure II-35 — Différence de potentiel sur les jonctions Vbe, Vbc et Vce du transistor T3 pour Vtune = 4,5 V (en bleu) et Vtune = 1 V (en rouge) ... 93
Figure II-36 — Différences de potentiels des jonctions collecteur-émetteur des transistors T1, T2 et T3. ... 94
Figure II-37 — Courants de collecteur des transistors T1, T2 et T3. ... 95 Figure II-38 — Répartition des contributeurs au bruit de phase à 10 kHz de la porteuse et pour Vtune = 1V ... 96
Figure II-39 — Répartition des contributeurs au bruit de phase à 100 kHz de la porteuse et pour Vtune = 1V ... 96
Figure II-40 — Répartition des contributeurs au bruit de phase à 1 MHz de la porteuse et pour Vtune = 1V ... 97
Figure II-42 — Bruit généré par différentes résistances disponibles dans la librairie QUBiC4X en fonction de la fréquence. ... 99
Figure II-43 — Schéma électrique utilisé sous Cadence pour simuler l’impact de la valeur de la résistance sur le bruit généré. ... 99
Figure II-44 — Bruit généré par des résistances de même type disponibles dans la librairie QUBiC4X en fonction de la fréquence. ... 100
Figure II-45 — Schéma électrique du bloc de polarisation version 2. ... 101 Figure II-46 — Impact du changement de version du bloc de polarisation sur les tensions base-collecteur des transistors T1 et T2 en fonction de la tension
d’alimentation Vdd ... 102 Figure II-47 — Schéma électrique du bloc de sortie. ... 103 Figure II-48 — Signal d’entrée (en bleu) et signal de sortie (en rouge) du bloc de sortie pour Vtune = 1 V. ... 104
Figure II-49 — Circuit de test utilisé pour les simulations post-layout de la version VCO_A2. ... 105
Figure II-50 — (a) Conductances du résonateur et de la partie active, (b) partie imaginaire de l’admittance totale, pour Vtune = 1 V. ... 106
Figure II-51 — (a) Conductances du résonateur et de la partie active, (b) partie imaginaire de l’admittance totale, pour Vtune = 4,5 V. ... 106
Figure II-52 — Analyse temporelle pour Vtune = 1 V et Vtune = 4,5 V. ... 107 Figure II-53 — (a) Tensions collecteur-émetteur des transistors de la partie active pour Vtune = 1 V (b) tensions collecteur-émetteur des transistors de la partie active pour Vtune = 4,5 V. ... 107
Figure II-54 — (a) Courants des collecteurs des transistors de la partie active pour Vtune = 1 V, (b) courants des collecteurs des transistors de la partie active pour Vtune = 4,5 V. ... 108
Figure II-55 — Fréquence d’oscillation simulée de l’O.C.T. VCO_A2 en fonction de Vtune. ... 109
Figure II-56 — Niveaux de bruit de phase à 10 kHz, 100 kHz et 1 MHz de la porteuse en fonction de Vtune. ... 109
Figure II-57 — Consommation totale de courant en fonction de Vtune. ... 110 Figure II-58 — Sensibilité de la fréquence d’oscillation en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 111
Figure II-59 — Sensibilité du bruit de phase à différentes distances de la porteuse en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 111 Figure II-60 — Sensibilité de la fréquence d’oscillation à la tension d’alimentation en fonction de Vtune. ... 112
Figure II-61 — Analyse temporelle pour Vtune = 1 V et Vtune = 4,5 V. ... 114 Figure II-62 — (a) Tensions collecteur-émetteur des transistors de la partie active pour Vtune = 1 V (b) tensions collecteur-émetteur des transistors de la partie active pour Vtune = 4,5 V. ... 115
Figure II-63 — (a) Courants des collecteurs des transistors de la partie active pour Vtune = 1 V (b) courants des collecteurs des transistors de la partie active pour Vtune = 4,5 V. ... 115
Figure II-64 — Fréquence d’oscillation simulée de l’O.C.T. VCO_A2 en fonction de Vtune. ... 116
Figure II-65 — Niveaux de bruit de phase à 10 kHz, 100 kHz et 1 MHz de la porteuse en fonction de Vtune. ... 116
Figure II-66 — Consommation totale de courant en fonction de Vtune. ... 117 Figure II-67 — Sensibilité de la fréquence d’oscillation en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 118
Figure II-68 — Sensibilité du bruit de phase à différentes distances de la porteuse en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 118 Figure II-69 — Sensibilité de la fréquence d’oscillation à la tension d’alimentation en fonction de Vtune. ... 119
Figure II-70 — Schéma de principe du couplage direct ... 120 Figure II-71 — Circuit de test utilisé pour les simulations post-layout de la version VCO_A1X2. ... 121
Figure II-72 — Analyse temporelle pour Vtune = 1 V et Vtune = 4,5 V. ... 122 Figure II-73 — Fréquence d’oscillation simulée de l’O.C.T. VCO_A1X2 en fonction de Vtune. ... 123
Figure II-74 — Niveaux de bruit de phase à 10 kHz, 100 kHz et 1 MHz de la porteuse en fonction de Vtune. ... 123
Figure II-75 — Consommation totale de courant en fonction de Vtune. ... 124 Figure II-76 — Sensibilité de la fréquence d’oscillation en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 125
Figure II-77 — Sensibilité du bruit de phase à différentes distances de la porteuse en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 125 Figure II-78 — Sensibilité de la fréquence d’oscillation à la tension d’alimentation en fonction de Vtune. ... 126
Figure II-79 — Schéma simplifié d’un réseau de N O.C.T. couplés. ... 127 Figure II-80 — Circuit de test utilisé pour les simulations post-layout de la version VCO_A3X2. ... 128
Figure II-81 — Schéma de principe du couplage résistif ... 128 Figure II-82 — Déphasage de Out+ par rapport à Out- (°) pour Vtune=2,75V ... 129 Figure II-83 — Représentation en 3D du déphasage en fonction de Δ pour différents Vtune ... 131
Figure II-84 — Fréquence d’oscillation simulée de l’O.C.T. VCO_A3X2 en fonction de Vtune. ... 132
Figure II-85 — Niveaux de bruit de phase à 10 kHz, 100 kHz et 1 MHz de la
porteuse en fonction de Vtune. ... 132
Figure II-86 — Bruit de phase pour Vtune = 2,75V en fonction de Δ ... 133
Figure II-87 — Consommation totale de courant en fonction de Vtune. ... 134
Figure II-88 — Sensibilité de la fréquence d’oscillation en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 134
Figure II-89 — Sensibilité du bruit de phase à différentes distances de la porteuse en fonction de la température pour Vtune = 1 V (a) et Vtune = 4,5 V (b). ... 135
Figure II-90 — Sensibilité de la fréquence d’oscillation à la tension d’alimentation en fonction de Vtune. ... 135
Figure III-1 — Microphotographie de l’O.C.T. version VCO_A1 ... 146
Figure III-2 — Zoom sur les diodes varicaps du résonateur... 147
Figure III-3 — Vue en coupe de la technologie QUBiC4X ... 147
Figure III-4 — Zoom sur les composants de la fonction FP3 version 2 .... 149
Figure III-5 — Maillage de DTI placé sous les résistances de polarisation 149 Figure III-6 — Zoom sur les composants de la fonction FP3 version 2 .... 150
Figure III-7 — Déviations en forme de diapason autour des vias des inductances ... 150
Figure III-8 — Zoom sur la sortie mise sous 50 Ω ... 151
Figure III-9 — Sortie RF pour sonde GSG ... 152
Figure III-10 — Microphotographie de l’O.C.T. version VCO_A2 ... 153
Figure III-11 — Rappel du schéma électrique de la fonction FP3 version 1 ... 154
Figure III-12 — Zoom sur les composants de la fonction FP3 version 1.. 154
Figure III-13 — Microphotographie de l’O.C.T. version VCO_A1X2 ... 155
Figure III-14 — Microphotographie de l’O.C.T. version VCO_A3X2 ... 156
Figure III-15 — Schéma des sorties prélevées sur la version VCO_A3X2.156 Figure III-16 — Photo du wafer de 8 pouces ... 157
Figure III-17 — Schéma du banc de mesure de l’O.C.T. version VCO_A1 ... 158
Figure III-18 — Schéma de principe de la mesure de bruit de phase par la méthode des lignes à retard ... 158
Figure III-19 — Photo du banc de mesure ... 159
Figure III-20 — Photo de la puce pendant les mesures ... 159
Figure III-21 — Comparaison de la fréquence d’oscillation mesurée et simulée ... 160
Figure III-22 — Comparaison du bruit de phase simulé et mesuré, à 10 kHz de la porteuse ... 161
Figure III-23 — Comparaison du bruit de phase simulé et mesuré, à 100 kHz de la porteuse ... 162
Figure III-24 — Comparaison du bruit de phase simulé et mesuré, à 1 MHz de la porteuse ... 162
Figure III-25 — Bruit de phase BLU en fonction de la fréquence d’offset pour Vtune = 2,5 V ... 163
Figure III-26 — Consommation totale de courant en fonction de Vtune .. 164 Figure III-27 — Comparaison de la fréquence d’oscillation mesurée et simulée ... 166 Figure III-28 — Comparaison du bruit de phase simulé et mesuré, à 10 kHz de la porteuse ... 167
Figure III-29 — Comparaison du bruit de phase simulé et mesuré, à 100 kHz de la porteuse ... 167
Figure III-30 — Comparaison du bruit de phase simulé et mesuré, à 1 MHz de la porteuse ... 168
Figure III-31 — Bruit de phase BLU en fonction de la fréquence d’offset pour Vtune = 2,5 V ... 169
Figure III-32 — Consommation totale de courant en fonction de Vtune .. 169 Figure III-33 — Photo de la puce pendant les mesures de la version VCO_A1X2 ... 171
Figure III-34 — Comparaison de la fréquence d’oscillation mesurée et simulée ... 172 Figure III-35 — Comparaison du bruit de phase simulé et mesuré, à 10 kHz de la porteuse ... 173
Figure III-36 — Comparaison du bruit de phase simulé et mesuré, à 100 kHz de la porteuse ... 173
Figure III-37 — Comparaison du bruit de phase simulé et mesuré, à 1 MHz de la porteuse ... 174
Figure III-38 — Bruit de phase BLU en fonction de la fréquence d’offset pour Vtune = 2,5 V ... 175
Figure III-39 — Consommation totale de courant en fonction de Vtune .. 175 Figure III-40 — Bruit de phase BLU en fonction de la fréquence d’offset pour Vtune = 1 V ... 177
Figure III-41 — Photo de la puce VCO_A3X2 pendant les mesures... 178 Figure III-42 — Schéma de principe des sorties prélevées sur la version VCO_A3X2. ... 179
Figure III-43 — Capture d’écran de l’oscilloscope lors des mesures ... 179 Figure III-44 — Déphasage des sorties en fonction de Δ ... 181 Figure III-45 — Extrait de la méthodologie NXP Semiconductors pour l’extraction de parasites ... 183
Figure III-46 — Extrait de l’onglet « filtrage » pour l’extraction de parasites ... 184
L
ISTE DES TABLEAUX
Table 1 — Tableau récapitulatif des performances d’O.C.T. issus de la littérature et de l’industrie ... 40
Table 2 — Synthèse des performances des familles technologiques ... 46 Table 3 — Spécifications de l’O.C.T. à réaliser ... 57 Table 4 — Données constructeurs pour deux types de varactors de la technologie QUBiC4X ... 62
Table 5 — Plan du déphasage en fonction de Δ pour différents Vtune ... 130 Table 6 — Résumé des résultats de mesures de la version VCO_A1 ... 165 Table 7 — Résumé des résultats de mesures de la version VCO_A2 ... 170 Table 8 — Résumé des résultats de mesures de la version VCO_A1X2 .... 176 Table 9 — Déphasage des sorties en fonction de Δ ... 180 Table 10 — Résumé des résultats de mesures de la version VCO_A3X2 .. 182 Table 11 — Comparatif des O.C.T. avec les quatre versions réalisées ... 186
G
LOSSAIRE
ADS Advanced Design System
AM Amplitude Modulation
BF Basse Fréquence
BiCMOS Bipolar Complementary Metal Oxyde Semiconductor CMOS Complementary Metal Oxyde Semiconductor
FOM Figure Of Merit GaAs Galluim Arsenide
HBT Heterojunction Bipolar Transistor
HF Haute Fréquence
InP Indium Phosphide
ISF Impulse Sensitivity Function MIM Metal Interlayer Metal
MOS Metal Oxyde Semiconductor OCT Oscillateur Contrôlé en Tension OL Oscillateur Local
PM Phase Modulation
QAM Quadrature Amplitude Modulation
RF Radio-Fréquence
SiGe Silicon Germanium
TBH Transistor Bipolaire à Hétérojonction VCO Voltage Controlled Oscillator
es systèmes de communications point-à-point et les communications par satellite de type VSAT opèrent dans les bandes Ku et Ka et utilisent fréquemment des modulations complexes à haute efficacité spectrale dans le but de réduire le spectre utile et d’économiser de la bande de fréquence. Dans les communications point-à-point, il n’est pas rare d’avoir recours à des modulations amplitude/phase du type 1024 QAM qui exigent des porteuses radiofréquences de très haute pureté spectrale. La qualité de l’Oscillateur Contrôlé en Tension (O.C.T.) utilisé devient un élément déterminant de la qualité du synthétiseur de fréquence dans la chaîne de transmission. Il serait en effet inutile d’espérer transmettre un signal à de si hautes fréquences et avec de telles modulations sans un excellent oscillateur. Le principal critère reflétant la pureté spectrale du synthétiseur de fréquence – et par conséquent celle de l’O.C.T. – est le bruit de phase. Aujourd’hui, les oscillateurs nécessaires à la génération de ces porteuses sont essentiellement intégrés dans des technologies III-V telles que le GaAs ou encore InP.
Depuis plusieurs décennies, NXP Semiconductors accumule un certain savoir-faire dans la conception et la réalisation d’oscillateurs RF et micro-ondes mais dans des domaines où la pureté spectrale exigée est moindre que celle requise par les applications visées dans cette thèse. La technologie QUBiC4X 0,25 µm SiGe:C BiCMOS de NXP Semiconductors est capable d’adresser les bandes Ku et Ka, cependant, la possibilité de réaliser des oscillateurs intégrés d’une pureté spectrale comparable à celle obtenue par des circuits en technologie III-V reste à démontrer. Au-delà de la simple volonté de concurrencer les technologies III-V, un autre objectif, plus large, est de permettre le déploiement vers le grand public d’applications telles que les systèmes de communication par satellite – notamment ceux couramment désignés sous le terme VSAT – grâce à l’intégration des fonctions radio dans une technologie bas coût. En effet, le coût, encore élevé des technologies III-V et leur faible densité d’intégration constituent actuellement un véritable frein à l’essor vers le grand public des applications VSAT, qui restent donc confinées à des marchés de « niche » de type professionnel.
L’objectif de cette thèse est donc de démontrer la faisabilité de tels O.C.T. en technologie QUBiC4X. Pour atteindre un tel objectif, les conceptions classiques seront évidemment étudiées pour comprendre les avantages et inconvénients de chacune ainsi que les inévitables compromis à faire dans la conception d’O.C.T. dont le bruit de phase doit être extrêmement faible.
Le premier chapitre revient sur les bases fondamentales à la compréhension des phénomènes inhérents aux composants électroniques et présents dans les oscillateurs plus particulièrement. Nous rappellerons dans un premier temps le principe de fonctionnement d’un oscillateur, les différents types de bruits électroniques ainsi que les effets de ces bruits sur un O.C.T. Nous tâcherons ensuite d’identifier les facteurs
limitatifs à l’obtention d’une haute pureté spectrale. Une recherche bibliographique nous permettra de faire ressortir les différentes architectures utilisées dans la littérature et d’associer à chacune leurs avantages et inconvénients. Par ailleurs, un état de l’art sera dressé pour identifier les différentes tendances actuellement observées.
Le deuxième chapitre commence par présenter le cahier des charges fixé par NXP Semiconductors pour la conduite de ces travaux de recherche. Il se poursuit en détaillant l’étude et la conception des différentes fonctions principales communes aux quatre versions d’O.C.T. réalisées pour la bande Ku. Tous les choix effectués concernant les structures utilisées y seront justifiés par la théorie et la simulation, du résonateur à la partie active. Les quatre versions feront l’objet de simulations « post-layout »1 afin d’estimer au mieux les performances. La version d’O.C.T. directement couplés sera comparée avec les versions non couplées pour justifier son intérêt. La seconde version couplée à l’aide de résistances fera l’objet de simulations supplémentaires afin d’obtenir les plans de déphasage des signaux de sorties.
Enfin, le troisième chapitre est consacré à la phase de dessin des masques ainsi qu’aux mesures réalisées et aux résultats obtenus. Tout d’abord, les dessins des masques de toutes les fonctions des O.C.T. seront présentés et certains points seront particulièrement détaillés. Nous présenterons par la suite le banc de mesures utilisé ainsi que les résultats de mesures obtenus pour les quatre versions d’O.C.T. Ensuite, nous détaillerons les différentes investigations menées pour tenter d’expliquer les différences observées entre la simulation et les mesures. Finalement, ce chapitre se termine par une comparaison des performances des O.C.T. fabriqués avec l’état de l’art actuel.
CHAPITRE I : INTRODUCTION AU TRAVAIL
DE RECHERCHE
Table des matières du chapitre
1. La théorie des oscillateurs ... 9 1.1. Existence des oscillations ... 10 1.2. Naissance des oscillations ... 11 1.3. Limitations des oscillations ... 11 2. Les sources de bruit électronique ... 11 2.1. Le bruit thermique ... 12 2.2. Le bruit de scintillement ou bruit de Flicker ... 12 2.3. Le bruit de grenaille ou bruit shot ... 13 2.4. Le bruit de génération-recombinaison ... 13 3. Le bruit dans les oscillateurs ... 14 3.1. Phénomène de conversion du bruit ... 16 3.2. Le bruit d’amplitude ... 17 3.3. Le bruit de phase ... 18 3.4. Modélisations du bruit de phase ... 21 3.4.1. Modèle linéaire invariant dans le temps ... 21 3.4.2. Modèle linéaire variant dans le temps ... 23 3.4.3. Conclusion pour le concepteur d’oscillateur ... 27 4. Présentation des différentes structures connues ... 28 4.1. Oscillateur en anneau ... 28 4.2. Oscillateur Colpitts ... 29 4.2.1. Généralités ... 29 4.2.2. Analyse de l’impédance présentée par l’amplificateur ... 30 4.3. Oscillateur à paire croisée ... 31 4.3.1. Généralités ... 31 4.3.2. Analyse de l’impédance présentée par l’amplificateur ... 32 4.4. Oscillateurs Colpitts « gm-boosted » ... 33 4.4.1. Oscillateur Colpitts « gm-boosted » version 1 ... 34 4.4.2. Oscillateur Colpitts « gm-boosted » version 2 ... 35 5. Performances des O.C.T connus ... 37
5.2. Observations sur la plage de fréquence couverte relative à la fréquence centrale ... 42
5.3. Observations sur le critère de niveau de bruit de phase ... 43 5.4. Observations sur le facteur de mérite FOMT ... 44 5.5. Résumé des performances observées ... 46 6. Conclusion ... 47 7. Références ... 48
Ce premier chapitre commence par définir les conditions nécessaires au démarrage des oscillations ainsi qu’au maintien de ces dernières, ou encore les conditions de limitation de leur amplitude. Nous poursuivrons en rappelant les bases fondamentales à la compréhension des phénomènes de bruits électroniques et du bruit dans les oscillateurs électriques en particulier. Nous ferons ensuite une présentation des principales structures connues d’oscillateurs ainsi qu’un comparatif des différentes performances de chaque famille technologique.
1. La théorie des oscillateurs
Un oscillateur électrique est un système autonome générant un signal de période fixe (cas d’un oscillateur simple) ou variable (cas d’un oscillateur contrôlé en tension ou O.C.T.). La forme du signal peut être sinusoïdale, carrée, triangulaire comme le montre la Figure I-1, ou encore une combinaison déformée des trois précédentes. Les oscillateurs sont utilisés dans bien des applications, de l’horloge d’un circuit numérique à la source de fréquence d’un oscillateur local (OL). Dans les récepteurs radiofréquences (RF), les signaux des oscillateurs sont utilisés comme référence de fréquence pour « redescendre » le signal RF reçu en bande de base ou à une fréquence intermédiaire particulière (on parle alors de « downconversion »). Dans toutes les applications RF, il est nécessaire d’avoir des références sinusoïdales d’une grande pureté spectrale (bruit de phase faible), ceci constitue d’ailleurs l’une des caractéristiques les plus importantes d’un oscillateur. En effet, ce bruit de phase va déterminer la stabilité de la périodicité des oscillations fournies. Dans ce chapitre, nous allons uniquement considérer dans ce chapitre l’utilisation d’oscillateurs LC2 étant donné qu’ils sont les plus utilisés pour les applications RF.
Figure I-1 — Exemples de formes d’ondes de signaux périodiques
t (s)
t (s)
t (s) Amplitude (V)
1.1. Existence des oscillations
L’oscillateur électrique est composé d’un circuit résonant passif, la plupart du temps de type inductance-capacité (LC) qui détermine la fréquence d’oscillation, ainsi que d’un circuit à base de transistors, appelé circuit actif. Du point de vue dynamique ce système est autonome et il est représenté sous la forme d’un système bouclé à entrée nulle, comme le montre la Figure I-2, où H1(jω) représente la fonction de transfert de la partie active et H2(jω) représente la fonction de transfert du résonateur. Cette schématisation implique une linéarisation du comportement de la partie active ; cette simplification est suffisante pour comprendre les conditions d’existence des oscillations et surtout les conditions de démarrage, pour lesquelles, le comportement originel est de fait faible signal, validant ainsi la linéarité citée plus haut.
Figure I-2 — Système bouclé représentant un oscillateur électrique
La rétroaction étant positive, la fonction de transfert en boucle fermée du système jω s’écrit :
jω = − jω .jω jω (I-1)
L’existence ou non des oscillations est déterminée par l’instabilité du système. De manière plus formelle, cette instabilité est représentée par les pôles de la fonction de transfert de la boucle fermée jω . Pour trouver ces éventuels pôles, mettons en équation le dénominateur de jω . Nous cherchons les cas pour lesquels le dénominateur s’annule.
− jω . jω = (I-2)
Puisque jω et jω sont complexes, cela signifie que les conditions à vérifier pour garantir l’existence des oscillations sont d’une part :
| jω . jω | = (I-3) et d’autre part : H1(jω) H2(jω) + Ve(jω) + Vs(jω)
( jω jω ) = nπ (I-4) où n est un entier naturel.
Ces deux conditions sont aussi connues sous le nom de critère de Barkhausen.
1.2. Naissance des oscillations
À l’instant où l’oscillateur électrique est mis sous tension, le respect du critère de Barkhausen ne suffit pas pour donner naissance à des oscillations. Autrement dit, dans le monde réel, nous ne pouvons pas garantir la naissance des oscillations si l’équation (I-3) est strictement vérifiée, par conséquent nous avons deux cas de figure.
Premier cas : | jω . jω | <
Dans cette situation, les éventuelles oscillations existantes sont amorties et s’évanouissent dans le temps. La sortie du système est faite d’oscillations hasardeuses de faible amplitude. Nous sommes face à un système dont la partie active n’apporte pas suffisamment d’énergie pour compenser les pertes du résonateur.
Second cas : | jω . jω | >
Dans cette situation, la partie active apporte plus d’énergie que le résonateur n’en perd. Les oscillations s’amplifient donc dans le temps et ne s’évanouissent pas. Sans autres indications, il est clair qu’une telle situation n’est évidemment pas possible dans le monde réel puisque l’amplitude des oscillations ne fait que croître, tendant alors vers l’infini.
1.3. Limitations des oscillations
Nous venons de voir que pour garantir le démarrage des oscillations dans le système, il est nécessaire que la partie active apporte plus d’énergie que le résonateur n’en perd. Cependant, lorsque l’amplitude des oscillations devient importante, les composants qui constituent la partie active finissent par sortir de leur zone de fonctionnement linéaire, entraînant alors une diminution du gain d’amplification. Cette baisse du gain d’amplification va alors s’opérer jusqu’à satisfaire le critère présenté dans l’équation (I-3).
Finalement, pour garantir le démarrage et le maintien des oscillations dans un oscillateur électrique, il faut que la partie active fournisse une quantité d’énergie légèrement supérieure aux pertes du résonateur.
2. Les sources de bruit électronique
Tout matériau semi-conducteur est, de par sa constitution cristalline, sujet aux bruits électroniques. Nous allons ici rappeler les bases fondamentales à la
2.1. Le bruit thermique
L’un des composants les plus simples dans le monde de l’électronique est la résistance. Elle est aussi l’une des sources de bruit les plus communes. En effet, la résistance, telle qu’on l’entend ici, représente tout type de matériau susceptible de s’opposer au passage de charges électriques. Le phénomène de bruit thermique est présent dans toute résistance dont la température est supérieure au zéro absolu, c’est-à-dire dont l’excitation thermique n’est pas nulle.
Cette excitation thermique va provoquer des déplacements aléatoires de porteurs de charges qui vont à leur tour, être à l’origine de tensions électriques aléatoires sur tous les éléments résistifs. C’est pourquoi ce bruit est appelé bruit thermique et est exprimé par la variance de la tension aux bornes d’une résistance de valeur R (voir Figure I-3) dans la bande de fréquence d’intérêt :
̅̅̅ = ∆ (I-5)
avec :
k la constante de Boltzmann T la température absolue
∆ la bande de fréquence d’intérêt.
L’équation (I-5) est souvent normalisée dans une bande de fréquence de 1 Hz.
Figure I-3 — Schéma équivalent représentant une source de bruit thermique
Le bruit thermique est un bruit blanc, cela signifie qu’il ne dépend pas de la fréquence.
2.2. Le bruit de scintillement ou bruit de Flicker
Le bruit de scintillement n’a pas d’origine aussi clairement définie que le bruit thermique. Ce bruit est lié aux fluctuations du nombre de porteurs et de leur mobilité. Il est aussi connu sous le nom de bruit en 1/f, puisque sa densité spectrale de puissance est inversement proportionnelle à la fréquence, c’est donc un bruit que l’on peut qualifier de bruit basse fréquence, dont la densité spectrale de courant
s’exprime selon l’équation suivante : +
-
R
= �ℎ. (I-6) avec :
ℎ est le coefficient de Hooge global f est la fréquence de fonctionnement � est un coefficient empirique
N est le nombre de porteurs I est le courant de porteur libre.
2.3. Le bruit de grenaille ou bruit shot
Le bruit de grenaille existe dans les composants où les électrons doivent franchir une barrière d’énergie, par exemple dans une jonction PN. Dans un transistor bipolaire, ce bruit est principalement présent dans la jonction base-collecteur lorsqu’un courant continu y circule. L’expression du bruit de grenaille dans la base et le collecteur d’un transistor bipolaire dans de telles conditions est définie par :
�̅ = ∆ (I-7)
�̅ = ∆ (I-8)
où q est la charge électrique de l’électron dans la bande de fréquence ∆ . Le temps mis par les électrons pour franchir la barrière d’énergie est aléatoire et donne au bruit de grenaille un spectre indépendant de la fréquence : il s’agit donc d’un bruit blanc.
2.4. Le bruit de génération-recombinaison
Aucun matériau semi-conducteur n’est d’une composition pure à 100%, autrement dit tout matériau semi-conducteur possède des impuretés, qu’elles soient volontairement, ou non, présentes. Du point de vue des porteurs de charges, ces impuretés représentent des pièges dans lesquels elles peuvent être bloquées un certain temps, puis libérées. Ce phénomène entraîne une modification du nombre de porteurs et génère du bruit électronique basse fréquence appelé bruit de génération-recombinaison.
Sa densité spectrale de courant est :
= ( ) ∆̅̅̅̅̅̅ + �� � (I-9)
avec :
n est la densité volumique de porteurs de charge V est le volume de l’échantillon considéré
∆̅̅̅̅̅̅ est la valeur quadratique moyenne des fluctuations du nombre de porteurs
� est le temps de relaxation.
3. Le bruit dans les oscillateurs
Nous venons de voir que plusieurs sources de bruit électronique existaient dans les matériaux conducteurs. Les oscillateurs sont faits de ces matériaux semi-conducteurs bruyants, il est donc parfaitement compréhensible que le comportement de l’oscillateur peut être altéré par ces sources de bruit.
En l’absence de bruit électronique, un oscillateur possède un spectre idéal, composé d’une seule raie à la fréquence d’oscillation (voir Figure I-4 (a)). L’expression du signal de sortie de l’oscillateur est dans ce cas :
é = . � + � (I-10)
avec :
A l’amplitude � la pulsation
� la phase à l’origine.
Ce cas idéal n’existe bien évidemment pas dans le monde réel. En effet, le bruit électronique est amplifié par la partie active de l’oscillateur et ceci a pour effet de parasiter le signal électrique de ce dernier sur chacune de ses caractéristiques (amplitude, fréquence et phase). Le bruit électronique a donc une amplitude et une phase qui varient aléatoirement. L’impact sur le spectre du signal de sortie de l’oscillateur est visible sur la Figure I-4 (b). C’est ainsi qu’apparaissent les notions de bruit d’amplitude et de bruit de phase (la fréquence étant liée à la phase).
Figure I-4 — Spectre du signal de sortie d'un oscillateur idéal (a) et d'un oscillateur bruité (b)
En représentant ce bruit électronique à l’aide de vecteurs, il apparaît que l’une des composantes du bruit est en phase avec le signal de l’oscillateur alors que l’autre est en quadrature avec le signal de l’oscillateur. La première provoque donc uniquement une modulation d’amplitude sur le signal utile alors que la seconde provoque une modulation de la phase du signal utile.
Figure I-5 — Représentation du signal bruité à l'aide de vecteurs L’expression du signal bruité de l’oscillateur est maintenant :
é = . � + � (I-11) avec : f (Hz) Densité spectrale de puissance (dBm) f (Hz) Densité spectrale de puissance (dBm) (a) (b) � � ′ ℎ
A(t) l’amplitude instantanée � la pulsation
� la phase instantanée.
Cette notion d’instantanéité traduit le fait que l’amplitude et la phase du signal sont maintenant modulées par le bruit.
Nous allons présenter dans les sous paragraphes suivants le phénomène de conversion du bruit, le bruit d’amplitude, ainsi que le bruit de phase. Enfin, nous identifierons les différentes méthodes de calcul de bruit de phase dans les oscillateurs.
3.1. Phénomène de conversion du bruit
Nous avons commencé à introduire l’idée de conversion du bruit au paragraphe 1.3 de ce chapitre, en observant que l’amplitude des oscillations était limitée par la saturation de l’amplificateur.
Pour bien comprendre ce mécanisme, reprenons à la base. Nous avons dit au paragraphe 2 que les matériaux semi-conducteurs étaient de par leurs constitutions, sujets à générer différentes sources de bruits. Autrement dit, intrinsèquement le spectre à l’entrée de l’oscillateur n’est pas nul et peut être résumé au spectre présenté dans la Figure I-6. Ce spectre est composé d’un bruit basse fréquence (bruit en 1/f) jusqu’à la pulsation � / et ensuite d’un bruit thermique (niveau du plancher de bruit).
Figure I-6 — Spectre de bruit à l'entrée de l'oscillateur
Ce spectre de bruit peut être discrétisé en une somme de composantes fréquentielles � , où chacune de ces composantes est apparentée à un signal sinusoïdal dont la puissance moyenne est la même dans le cas du bruit thermique. Le signal généré par l’oscillateur comporte une composante principale à la fréquence de fonctionnement ainsi que des harmoniques. Le spectre de bruit vu à l’entrée de l’oscillateur va alors moduler le signal de l’oscillateur mais aussi tous les harmoniques. Ce mélange des différents harmoniques avec le bruit va ramener du bruit autour de la porteuse. Ce phénomène est illustré en Figure I-7.
Densité spectrale de puissance � / Bruit en 1/f Bruit thermique Plancher de bruit � (rad/s)
Figure I-7 — Schématisation du phénomène de conversion de bruit autour de la porteuse
3.2.
Le bruit d’amplitude
Commençons par traiter le bruit d’amplitude et considérons dans un premier temps que notre oscillateur n’est affecté que par un vecteur bruit ayant comme seule composante celle en phase avec le signal utile de l’oscillateur. Le signal a dans ces conditions l’expression suivante :
é = ( + . � ). cos � + � (I-12)
avec :
A l’amplitude du signal non modulé � la pulsation du signal non modulé l’amplitude du signal modulant � la pulsation du signal modulant
� la phase à l’origine (cette dernière sera arbitrairement nulle pour la suite des calculs).
On simplifie cette expression pour obtenir la forme suivante :
é = ( + . � ). cos � (I-13)
avec m l’indice de modulation.
En utilisant des règles de trigonométrie, il vient que :
é = . cos � + . � + � . � − � . (I-14)
Le spectre de la puissance de ce signal modulé est représenté en Figure I-8. Densité spectrale de puissance � / Bruit en 1/f Bruit thermique Plancher de bruit � (rad/s) �
Figure I-8 — Spectre du signal de l'oscillateur modulé en amplitude La puissance dans une bande latérale est donc :
= (I-15)
Le bruit d’amplitude représente le rapport de la puissance de bruit sur la puissance de la porteuse et est défini par :
Bruit d’amplitude = ( ) = (I-16)
Nous le disions, le bruit d’amplitude est en phase avec le signal utile de l’oscillateur et par conséquent, son amplitude s’ajoute à ce dernier. Comme cela a été rappelé au paragraphe 1.3 de ce chapitre, l’amplitude des oscillations est limitée par la saturation de l’amplificateur. Cela signifie que l’effet du bruit d’amplitude est très majoritairement atténué et pour le moins suffisamment faible face aux autres bruits pour ne pas être considéré.
3.3. Le bruit de phase
Nous allons maintenant traiter le bruit de phase et nous allons pour cela considérer que notre oscillateur n’est affecté que par un vecteur bruit ayant comme seule composante celle en quadrature avec le signal utile de l’oscillateur. Le signal a dans ces conditions l’expression suivante :
é = . cos (� + . � ) (I-17)
avec :
A l’amplitude du signal non modulé � la pulsation du signal non modulé
f (Hz) Puissance
� la pulsation du signal modulant l’indice de modulation
L’expression de cet indice de modulation est rappelée ici :
= ∆ � (I-18)
En développant l’expression (I-17), on a :
é = [cos � . cos( . � ) − sin � . sin( . � )] (I-19) En utilisant la fonction de Bessel de première espèce définie en (I-20),
∀ ∈ ℝ, ∀ ∈ ℕ ∀� ∈ ℝ
= �∫ cos � − .sin �� � (I-20)
on peut alors écrire :
cos . sin � = + ∑ [ + − ]. cos � =+∞
=
(I-21)
et
sin . sin � = ∑ [ − − ]. sin � =+∞
=
(I-22)
On peut maintenant injecter (I-21)et (I-22) dans (I-19), on a alors : é = . . cos � + ∑ [( + − )cos � cos � =+∞ = − ( − − )sin � sin � ] (I-23)
En simplifiant par les relations trigonométriques, on obtient : é = . . cos � + ∑ [ cos( � + � ) =+∞ = + − cos( � − � )] (I-24) Or − cos( � − � ) = − cos( � − � ) = cos( � − � + �) (I-25)
é = . . cos � + ∑ [ cos( � + � ) =+∞ = + cos( � − � + �)] (I-26)
La fonction de Bessel de première espèce peut également s’écrire à l’aide d’un développement en série entière (I-27).
= ∑ ! −+ !
=+∞ =
(I-27)
L’indice de modulation est considéré comme très petit devant un puisqu’il s’agit de l’amplitude d’une source de bruit. En posant cette hypothèse, nous pouvons simplifier l’expression (I-26) en négligeant les termes dès l’ordre deux.
On a alors :
é ≅ . cos � + cos( � + � )
+ cos( � − � + �) (I-28)
Le spectre de puissance de ce signal modulé est représenté en Figure I-9
Figure I-9 — Spectre du signal de l'oscillateur modulé en phase
Ce spectre est identique à celui de la Figure I-8. La puissance dans une bande latérale est donc :
= = ∆ (I-29)
f (Hz) Puissance
En généralisant ce calcul à une modulation à spectre continu, on peut définir la puissance du signal modulé en s’appuyant sur la densité spectrale de bruit de phase (notée � dans une bande de fréquence de largeur B, centrée sur ) comme suit :
= �( ). (I-30)
Le bruit de phase représente le rapport de la puissance de bruit sur la puissance de la porteuse (voir Figure I-10) dans une bande de fréquence de 1 Hz, il est communément noté ℒ et s’exprime en dBc/Hz. L’indice « c » de dBc nous rappelle que nous observons un niveau relatif au niveau de la porteuse, carrier en anglais, c’est-à-dire pour A =1. Il est défini par :
Bruit de phase = ℒ = ( ) = � (I-31)
Figure I-10 — Spectre simplifié du signal de sortie d'un oscillateur pour la compréhension du bruit de phase
3.4. Modélisations du bruit de phase
3.4.1. Modèle linéaire invariant dans le temps
Nous allons maintenant étudier le modèle de bruit de phase proposé par D.B. Leeson [I-1] en 1966, et qui s’appuie sur les travaux de Cutler [I-2]. Depuis cette date, beaucoup de chercheurs l’ont utilisé comme point de départ pour formuler de nouvelles approches à la prédiction du bruit de phase. D.B. Leeson fût le premier à décrire de façon précise le phénomène de bruit de phase dans les oscillateurs.
Le modèle de Leeson consiste à considérer l’oscillateur comme un système bouclé composé d’un amplificateur avec un facteur de bruit F et d’un résonateur. Le
f (Hz) Puissance
bruit à l’entrée de l’amplificateur est composé de bruit blanc et de bruit en 1/f, comme indiqué sur la Figure I-6.
Cette modélisation permet d’exprimer le bruit de phase selon l’équation (I-32) ℒ{� } = log { [ + ( �� ) ] . [ +�� ]}/ (I-32) avec :
F le facteur de bruit
k la constante de Boltzmann T la température absolue
la puissance dissipée par le résonateur � la pulsation du signal
Q le facteur de qualité en charge du résonateur � l’écart à la pulsation du signal
� / la pulsation à partir de laquelle la conversion due au bruit en 1/f n’est plus prépondérante.
Cette équation met en évidence les premières considérations à avoir pour obtenir un faible bruit de phase, elle permet de dégager les tendances qui régissent le bruit de phase d’un oscillateur LC. Tout d’abord, améliorer le facteur de qualité du résonateur est un point critique. Ensuite, augmenter la puissance du signal en augmentant l’amplitude des oscillations ou la quantité de courant dans le résonateur, afin d’obtenir un meilleur rapport signal sur bruit. Enfin, réduire les sources de bruit en 1/f afin de minimiser le bruit de phase proche de la porteuse.
En analysant encore cette équation, nous pouvons identifier trois zones distinctes. Pour les plus basses fréquences et jusqu’à � / , nous avons maintenant une zone dont la pente est de -30 dB/décade (zone numéro 1). À partir de � / et jusqu’à � / nous avons une zone de -20 dB/décade (zone numéro 2) et enfin à partir de � / , nous avons le plancher de bruit (zone numéro 3). Ces trois zones sont représentées sur la Figure I-11, qui est une représentation très connue à ce jour de l’allure du bruit de phase.
Figure I-11 — Bruit de phase d’un oscillateur selon le modèle de Leeson
Cependant cette approche linéaire invariante dans le temps s’applique uniquement si on utilise un modèle linéaire d’oscillateur, qui n’est – comme nous l’avons déjà vu – pas un modèle réaliste. De plus l’estimation des paramètres de facteur de bruit F et de pulsation limite entre les zones 1 et 2, � / , n’est pas évidente. On note qu’en réalité, il pourrait subsister dans certains cas des reliquats de bruit en 1/f entre les zones 2 et 3 (zone en -10 dB/décade) Nous retiendrons donc du modèle de Leeson qu’il est un excellent outil pour les concepteurs d’oscillateurs, permettant de percevoir les tendances à suivre pour diminuer le bruit de phase.
3.4.2. Modèle linéaire variant dans le temps
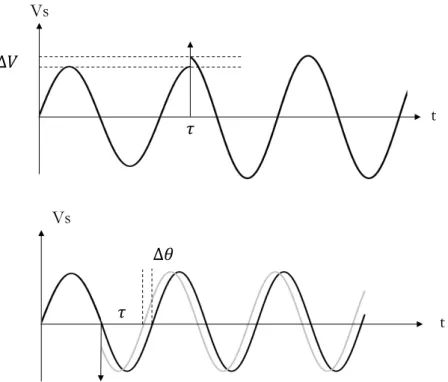
Des années plus tard, en 1998, Hajimiri et Lee ont proposé un modèle linéaire variant dans le temps décrivant les phénomènes de bruit de phase dans les oscillateurs [I-3]. Nous allons prendre le même exemple que les auteurs pour illustrer leur idée. Prenons le signal présent sur le résonateur auquel nous allons appliquer une perturbation (une impulsion), à des instants différents, voir Figure I-12.
L{� } � / Modèle de Leeson � � / 2 3 1
Figure I-12 — Signal de sortie d’un oscillateur LC excité par une impulsion à deux instants différents
Dans le premier cas, nous allons appliquer la perturbation lorsque le signal passe par un de ses extrema. Ceci a pour conséquence d’entraîner un saut instantané de tension sur le signal, l’amplitude se voit donc modifiée de ∆ mais la phase quant à elle reste inchangée. Dans le second cas, nous allons appliquer la perturbation lorsque le signal passe par zéro. Ceci a pour conséquence d’entraîner un saut instantané de tension sur le signal, l’amplitude se voit donc modifiée de ∆ (signal gris) mais cette fois-ci la phase est elle aussi altérée de ∆�.
Après avoir pris connaissance de cette très simple démonstration, il apparaît évident que considérer l’évolution au court du temps des signaux présents au sein de l’oscillateur est indispensable pour prédire précisément le bruit de phase.
Les auteurs proposent alors de voir l’oscillateur comme système comportant autant d’entrées qu’il y a de nœuds dans le circuit et deux sorties et � , définies dans l’équation (I-11). L’idée principale réside dans le fait de définir une fonction représentant la sensibilité en phase à une impulsion de bruit pour toutes les entrées du système, cette fonction s’appelle ISF pour Impulse Sensitivity Function. Chaque nœud du système possède alors sa propre sensibilité aux perturbations, c’est-à-dire qu’en fonction de la forme de l’onde présente sur ce nœud à un instant donné, le signal sera plus ou moins sensible à une perturbation.
La Figure I-13 résume schématiquement le principe de la conversion du courant de bruit en tension de bruit sur la sortie d’un oscillateur. Cette conversion est ici décomposée en deux étapes, la première correspond à une conversion courant-phase
Vs � ∆� t Vs � ∆ t
linéaire variant dans le temps et la seconde à une conversion phase-tension non linéaire (modulation de phase).
Figure I-13 — Principe de la modélisation linéaire variant dans le temps
La fonction hφ(t,τ) représente la réponse impulsionnelle en un nœud du circuit et est définie par :
hφ t, τ = � τ
� u −τ
(I-33)
où :
� représente le déplacement maximal de charge à travers la capacité équivalente sur le nœud
u(t) est la fonction de Heaviside � τ est la fonction ISF
Dans le cas où le bruit de phase autour de la porteuse nous intéresse, la fonction (ω0t + φ(t)) peut être remplacée par la fonction (ω0t + φ(t)) représentant la fréquence fondamentale de l’oscillateur.
Puisque la fonction ISF est périodique, nous pouvons la décomposer en série de Fourier. Dans la zone en / , le bruit de phase dans la bande latérale unique est alors : ℒ{� } = log { � �̅̅̅̅⁄ . � � / � } (I-34) avec :
� / la pulsation à partir de laquelle les contributions en bruit en 1/f des composants commencent à disparaître.
le premier coefficient de la décomposition en série de Fourier de la fonction ISF.
� le déplacement maximal de charge à travers la capacité équivalente sur le nœud
�̅̅̅̅⁄ la densité spectrale de bruit.
hφ(t,τ) (ω0t + φ(t)) i(t) V(t) Modèle linéaire invariant dans le temps Modèle non linéaire φ(t)