Contribution à la commande adaptative optimale d’ordre fractionnaire.
Texte intégral
Figure


Documents relatifs
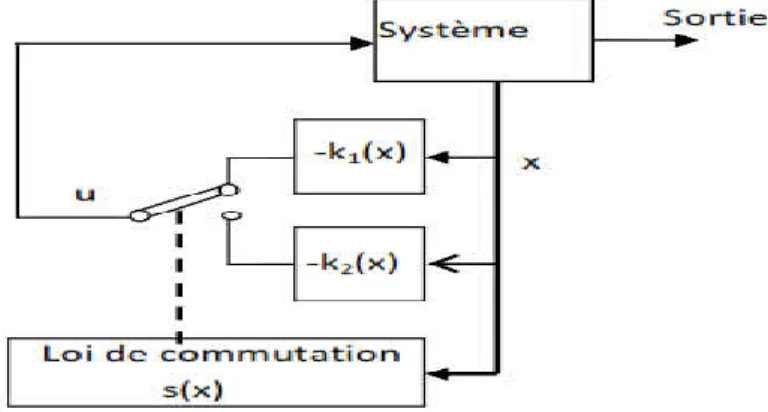
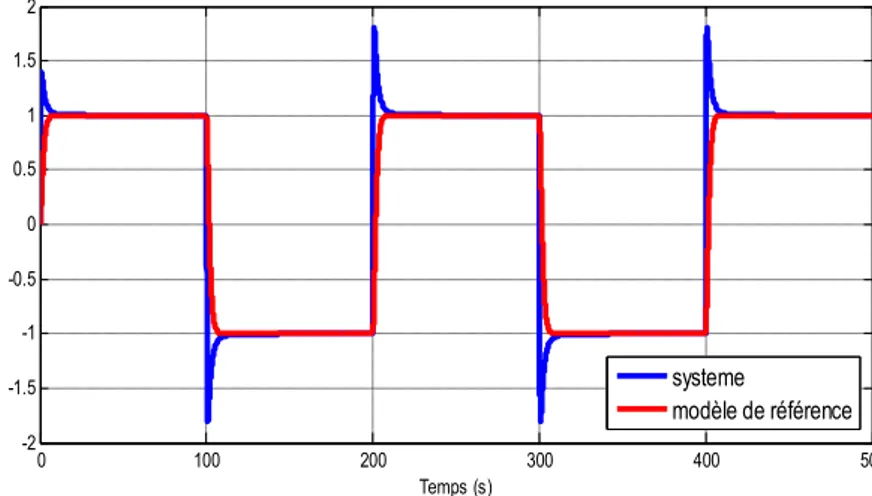
3). Une stratégie de commande adaptative oue d'ordre fractionnaire par mode glissant d'ordre non entier a été conçue dans le chapitre 3. Les résultats de simulation concernant
Dans ce chapitre, nous avons étudié le problème de la commande adaptative robuste avec zone-morte à l’entrée pour une classe des systèmes non linéaires incertains .Cette
une commande adaptative basée sur la logique floue est proposée dans [62], le modèle de Takagi Sugeno est utilisé dans [63] [64] pour la stabilisation et l’estimation de
Dans ce chapitre, nous avons proposés une commande par backstepping adaptative sur un modèle demi-véhicule d’un system de suspension incertaine, les tests de simulations
Dans ce travail, nous présentons le développement de structures de commande adaptative floue basées sur les systèmes flous type-1 et les systèmes flous type-2 pour
Les travaux présentés dans cette thèse de Doctorat ont pour objectif principal le développe- ment de structures de commande adaptative floue combinées à différentes approches
Après la réalisation des deux premiers types de la commande adaptative avec et sans contraintes de positivité et la commande floue, et finalement le contrôleur
Les travaux présentés dans cette thèse ont pour objectif de contribuer au développement et à la mise en oeuvre d’une commande adaptative floue par mode glissant d’un système non
