WORKING
PAPER
ALFRED
P.SLOAN
SCHOOL
OF
MANAGEMENT
DETERMINISTIC CHAOS
INAN EXPERIMENTAL ECONOMIC
SYSTEM
John
D.Sterman
July, 1988WP #2040-88
MASSACHUSETTS
INSTITUTE
OF
TECHNOLOGY
50
MEMORIAL
DRIVE
CAMBRIDGE,
MASSACHUSETTS
02139
j;mJohn
D.Sterman
MIT.
LIBRARIES
"3
1 6 1988
Deterministic
Chaos
inan
Experimental
Economic
System
John D.
Sterman
Massachusetts Institute of
Technology
Sloan School ofManagement
Cambridge,
MA
02139
July 1988
The
contributions andcomments
of RichardDay,
ChristianKampmann,
Edward
Lorenz, Ilya Prigogine,
James
Ramsey, Rebecca
Waring, and particularly ErikAbstract
An
experiment with a simulatedmacroeconomic
system demonstrates that thedecision-making processes of agents can
produce
deterministic chaos. Subjectsmanaged
capital investment in a simple multiplier-accelerator
economy.
Performance, however,was
systematically suboptimal.
A
model
of the subjects' decision rule is proposed and related topriorstudies of
dynamic
decision making.Econometric
estimatesshow
themodel
is anexcellent representation of the actual decisions.
The
estimated rules are then simulated toevaluate the stability of the subjects' decision processes.
While
the majority of the estimatedrules are stable, approximately
40%
yield a variety ofdynamics
including limit cycles, periodmultiples, and chaos. Analysis ofthe parameter space reveals a
complex
bifurcationstructure. Implications for
models
ofhuman
systemsand
experimental studies ofeconomic
dynamics
are explored.1. Introduction: coupling nonlinear
dynamics and
experimental
economics
Recent
work
in the physical sciences hasshown
deterministic chaos to be acommon
mode
of behavior indynamic
systems, thus stimulating the search for chaosand
other highlynonlinear
phenomena
inhuman
systems. Indeed, there has been a near explosion ofmodels
and
empirical studieswhich
seek toshow
the relevance ofnonlineardynamics
and chaos insocial
and
economic
settings. Several journals have devoted special issues to chaos andmodels
ofnonlinear, disequilibriumdynamics
inhuman
systems.^ This robust literature canbe divided roughly into (1) theoretical
models
of nonlinear dynamics, and (2) empiricalstudies
which
seek evidence of chaos ineconomic
data.Theoretical studies include the
work
ofDay
(1982),Dana
and
Malgrange
(1984),Grandmont
(1985),Rasmussen
and
Mosekilde
(1988), Stutzer (1980),and
many
others (seenote 1).
A
survey of these studies suggests the following generalizations. First,many
standard models, both micro-
and macroeconomic,
when
modified to include realisticnonlinearities, can be
shown
to contain regimes ofchaos and other nonlinearphenomena
suchas mode-locking, period multiples, and quasiperiodicity.
Benhabib and
Day's (1981) studiesof such simple
models
leadthem
to "expect the possibility oferratic [chaotic] behavior forawide
variety ofdynamic economic models
involving rational decision-making with feedback."Subsequent
work
has borne out this conjecture-
the possibility ofchaos does notseem
todepend on
particular behavioral assumptions buton
more
fundamental properties.However,
most models
ofnonlineardynamics
have been purely theoretical, and have not involvedeconometric estimation of the parameters.
The
few
exceptionshave found
the estimatedparameters lie well outside the chaotic regime, e.g.
Candela
and Gardini (1986)and
Dana
andMalgrange
(1984).As
Day
and
Shafer (1985, 293) note,"Whether or not
we
can construct empirical models that offerconvincing explanation ofreal worldmacro activity [in terms of deterministic chaos] is an open question: most economists would probably
agree that
we
are as yet quite far from a definitive answer to it. Whatwe
know now...is that amongthe empirical phenomena that
we
can hope to explain...are stochasticlike fluctuations in economic data.Moreover,
we
need not expect thatexotic assumptions or bizarre model structures will be required"D-3976
The
relative simplicity and theoretical focus of themodels
is entirely appropriate to theearly exploration of
new
concepts and analytical tools.However,
the theoreticalwork
to dateleaves
unanswered
questions about the relevance of these models.Can
chaos arisefrom
thebehavior ofactual agents?
Do
the chaotic regimes in themodels
lie in the realistic region ofparameter space, or are they mathematical curiosities unrealized in actual
economic
systems?The
empirical literature has sought toanswer
these questionsby
searching forevidence of chaos in
economic
data. This literature is notable for the clever adaptation oftechniques originally applied in physical settings, such as the
Takens
(1985)method
forrecovering low-dimensional attractors
from
a single time series, the Wolf, Swift, Swinney,and
Vastano (1985) technique forestimation ofLyapunov
exponentsfrom
experimental timeseries, and the Grassberger-Procaccia (1983) correlation dimension.
The
results aretantalizingly suggestive but inconclusive.
Brock
(1986) demonstrates amethod
to test thehypothesis of chaos in
economic
data against explicit alternative hypotheses, but finds "thatthere is not
enough
information available in U.S. realGNP,
real gross private domesticinvestment,
and
Wolfer's sunspot series...to reject the null hypothesis that...[these serieswere] generated
by
anAR(2)
process."Chen
(1988) andBamett and
Chen
(1988),however, find evidence of
low
dimensional strange attractors insome
but not all measures ofU.S.
monetary
aggregates. Their conclusions are tempered, however,by
uncertainties suchas the sensitivity of the
methods
used to thenumber
of data points, thenumber
of points perorbit, the
(unknown) magnitude
and statistical character of process noise, and the(unknown)
magnitude
and character ofmeasurement
error[Ramsey and
Yuan
(1987)].Brock
(1986, 192) concludes "It is notenough
when
you
areworking
with short data sets to reportlow
dimension and positiveLyapunov
exponents tomake
the case for deterministic chaos in yourdata" (emphasis in original).
Ramsey,
Sayers, andRothman
(1988) have identifiedsignificant biases in calculations ofcorrelation dimension caused by small sample size and conclude "that while there is abundant evidence for the presence ofnonlinear stochastic
attractors of the type that have been discovered in the physical sciences."
The
prevalence ofchaos in themodels
butlow
power
of aggregate statistical testsmotivates a
complementary
approach basedon
laboratory experiments with simulatedeco-nomic
systems.The
pioneeringwork
of Smith (1982, 1986), Plott (1986),and
others hasdemonstrated that
many
economic
theories can be successfully tested in the laboratory. Thispaper applies these techniques to the investigation of chaos in
economic
systems. I reportthe results of an experiment with a simulated
macroeconomic
system, specifically amulti-plier-accelerator model. In the experiment, subjects play the role of
managers
of thecapital-producing sector of an
economy.
Each
time period theymust
make
a capital investmentdecision.
The
task ofthe agents is tomanage
acomplex
dynamic
system in disequilibrium, asystem with time lags, multiple feedbacks, and nonlinearities. I
show
that the behavior ofthesubjects is systematically suboptimal, suggesting the use of a
common
heuristic for decisionmaking.
A
model
ofthe subjects' decision rule is proposed.The
model
is wellgrounded
inthe literature ofeconomics, psychology, and behavioral decision theory.
Econometric
estimation
shows
the decision rule explains the agents' behavior well.Next
the estimateddecision rules are simulated, and it is
shown
that approximately40%
ofthe agents produceunstable behavior, including chaos.
The
parameter space of the system ismapped
and
shown
to contain a
complex
bifurcation structure.Thus
experimental evidence isadduced
that theactual decision processes of agents in a
common
economic
context can produce chaos.Limitations of the method, implications,
and
suggestions for future research are discussed.2.
The Model
The
experiment is basedon
a simplemodel
of the capital investment accelerator andis fully described in
Sterman
(1988a).The
model
creates a two-sectoreconomy
with acapital producing and
goods
producing sector.The
focus is the capital investment accelerator.Goodwin
(1951, 4) notes that the traditional acceleration principleassumes
...that actual, realized capital stock is maintained at the desired relation with output.
We
know inreality that it is seldom so, there being now too much and
now
too little capital stock. For this thereD-3976
4
industry....At the otherextreme there is an even more inescapable and effective limit. Machines, once made, cannot be unmade, so that negative investment is limited to attrition from wear.. ..Therefore
capital stock cannotbe increased fast enough in the upswing, nor decreased fastenough in the
downswing, so that atone time we have shortages and rationing of orders and at the other excess
capacity with idleplants and machines.
A
single factor ofproduction (capital plant and equipment) is considered.The
model
includes,however, an explicit representation ofthe capital acquisition delay (construction lag) and the
capacity ofthe investment
goods
sector.As
a result, orders forand
acquisition of capital arenot necessarily equal, and at any
moment
there will typically be a supply line ofcapital underconstruction. For simplicity, the
demand
for capital of the goods-producing sectorisexogenous, and there is
no
representation oftheconsumption
multiplier.The
model
allows forvariable utilization of the capital stock.Thus
productionP
is thelesser ofdesired production
P*
orproduction capacity C. Capacity is proportional to thecapital stock, with capital/output ratio k:
Pt
=
MIN(P*„Ct)
(1)Ct = Kt/K. (2)
The
capital stock of the capital sector isaugmented
by acquisitionsA
and diminishedby
depreciation D.
The
average lifetime ofcapital is given by x:Kt^l
=Kj
+(Aj-Dj)
(3)Dt =
Kt/T. (4)The
acquisition of capital by both the capital andgoods
sectors(A
andAG)
depends on
thesupply line ofunfilled orders each has accumulated (the backlogs
B
and
BG)
and the fractionofthe backlog delivered that period (J) (the suffix 'G' denotes a variable ofthe
goods-producing sector):
A,
= Bf4)t (4)AGt
=
BGt•(^, (5)<l>t
=
Pt/P*t (7)P*t = Bi
+BGt.
(8)unless the capital sector is unable to produce the required amount. Ifcapacity is insufficient
so that
P*>C,
<t)<land
shipments to each sector fall in proportion to the shortfall.Note
thatthe formulation for
<J) implies that
A+AG=P
at all times, ensuring that output is conserved.The
explicit representation ofthe construction supply line and the constrainton
productionmean
that the lag in acquiring capitalmay
be variable. It is easilyshown
that the averagecapital acquisition lag A=l/()). Normally, <\>=\ and
A=l
period. Ifcapacity is inadequate,however, <\> falls
and
A
lengthens as the backlogs of unfilled ordersgrow
relative to output.^The
supply lines of unfilled orders foreach sectorB
andBG
areaugmented
by ordersfor capital placed
by
each sector and emptiedwhen
those orders are delivered:Bui
=Bt
+
(Ot-Ai)
(8)BGt+i
-
BGt
+
(OGfAGt).
(10)Orders placed by the
goods
sector are anexogenous
input towhich
the subjects of theexperiment
must
respondby
ordering an appropriateamount
ofcapital for theirown
use:OGt
= exogenous
(11)Oj =
determined by subject. (12)Equations (1)-(12) thus define a third-order nonlinear difference equation system.
The
system has the interesting property that the nonlinear capacity utilization function ofeq.(1) divides the system into
two
distinct regimes, (^=\and
(}><1. Furthermore, the equilibriumpoint
P* =
C
lies exactly at the boundary. Considering each region in turn reveals interestingproperties of the
open
loop system.When
P*=P<C,
0=1,and
the system is linear:Kl+1
Bui
BGt.i
Bt
BGi
1 1OG,
(13)Excess capacity implies each sector receives the quantity ordered after
one
period.Note
thatthe system in this
regime
is always stable.The
capital stock is controllable via ordersO
(itD-3976
there is excess capacity, the goods-producing and capital-producing sectors are decoupled.
When
capacity is inadequate, however,P*>P=C,
(})<1,and
the system is nonlinear.Linearizing the system around the operating point (K, B,
BG)
anddefiningP*
=
B-i-BGand
^=
(K/K)/P* yieldsl-i.-L
T kP*B
kP*BG
kP* <t>=^
P* p* P* P* p*Kt
seminal
work
ofSmith
(1982) and Plott(1986).The
experimental protocol used here isdescribed in
Sterman
andMeadows
(1985) andSterman
(1987, 1988a).A
continuous timeversion ofthe
model
is developed and analyzed inSterman
(1985).For
the experiment it hasbeen converted to discrete time. Simulation
and
formal analysis confirm that the conversionto discrete time does not alter the essential
dynamics
of the system [Rasmussen,Mosekilde
andSterman
(1985),Sterman
(1988b)].The
experiment isimplemented on
IBM
PC-type
microcomputers.
A
'game board' is displayedon
the screen and provides the subjects withperfect information. Colorgraphics and animation highlight the flows oforders, production,
and
shipments to increase the transparency of the structure (figure 1).^No
overt timepressure
was
imposed.The
parameters (k=1 andx=10)
were
chosen tominimize
thecomputational burden
imposed on
the subjects, while remaining close to the original values.The
subject population(N=49)
consisted ofMIT
undergraduate, master'sand
doctoralstudents in
management
and
engineering,many
with extensive exposure toeconomics and
control theory; scientists
and
economistsfrom
various institutions in theUS,
Europe, and theSoviet Union;
and
business executives experienced in capital investmentdecisions includingseveral corporate presidents
and
CEOs.
Subjects are responsible foronly
one
decision-
how much
capital to order.The
goalofthe subjects in
making
these decisions is tominimize
total costs.The
cost function orscore
S
is defined as the average absolute deviationbetween
desired productionP*
and
production capacity
C
over theT
i>eriods ofthe experiment:T
S-(})S|P*t-Cj.
(16)t=0
The
cost function indicateshow
well subjects balancedemand
and
supply. Subjects arepenalized equally for both excess
demand
and excess supply. Absolute value rather thanquadratic or
asymmetric
costs provide an incentive to reach equilibrium while minimizing theD-3976
used, in violation of Smith's (1982) protocol forexperimental microeconomics.
While
many
economists argue that significant performance-based rewards are necessary to establish
external validity, a
number
of experiments in preference reversal [Gretherand
Plott (1979),Slovic and Lichtenstein (1983)] suggest performance is not materially affected
by
rewardlevels. Similar experiments have found
weak
or even negative effects ofincentiveson
performance, though the further study is
needed
[Hogarth andReder
(1987)]. Otherexperiments in
dynamic
decisionmaking
suggest the results are robust with respect tosignificant variations in the experimental environment.
Sterman
(1988c) describes an experiment with a simulated production-distribution system inwhich
financial rewardswere
used. Like the
model
here, the experimental system contained multiple feedbacks,nonlinearities, and time lags.
Yet
despite large differences in the experimental cover story,information set, incentives, time pressure, and complexity of the underlying system, the
results strongly reinforce those of the present experiment and support the
same
decision ruletested here, suggesting the relative insensitivity of the subjects to incentives
and
thedynamic
structure ofthe system. Other studies ofdynamic
decisionmaking which
generallysupport the results here include
Brehmer
(1987)and
MacKinnnon
andWearing
(1985).4. Results
The
trials reportedbelow were
run for36
periods. Allwere
initialized in equilibriumwith orders of
450
units each periodfrom
thegoods
sector and capital stock of500
units.Depreciation is therefore
50
units per period, requiring the capital sector toorder50
unitseach period to compensate.
By
eq. (8) desired production then equals450
-f- 50, exactly equalto capacity,
and
yielding an initial cost ofzero. Orders for capitalfrom
thegoods
sectorOG,
the onlyexogenous
input to the system, remain constant at450
for the firsttwo
periods. Inthe third period
OG
risesfrom
450
to 500, and remains at500
thereafter (figure 2).The
stepinput is not
announced
to the subjects in advance.Several trials representative of the sample are plotted in figure 3; table 1
summarizes
ordering 150 units in period 2.
The
increase in orders further boosts desired production,leading the subject to order still more.
Because
capacity is inadequate tomeet
the higherlevel of
demand,
unfilled orders accumulate in the backlog, boosting desiredproduction to apeak
of1590
units in period 6.The
fraction ofdemand
satisfied ({) drops to aslow
as52%,
slowing the
growth
ofcapacity and frustrating the subject's attempt to satisfydemand.
Faced
with high and rising
demand,
the subject's orders reach500
in the fifthperiod.Between
periods 7
and
8 capacity overtakesdemand.
Desired production falls precipitously as theunfilled orders are finally
produced
and delivered.A
huge
margin of excess capacity opens up.The
subject slashes orders after period 5, but too late. Orders placed previously continue toarrive, boosting capacity to a
peak
ofover 1600 units. Orders drop to zero,and
capacity thendeclines through discards for the next 12 periods. Significantly, the subject allows capacity to
undershoot its equilibrium value, initiating a second cycle ofsimilar amplitude and duration.
The
other trials aremuch
the same.While
specifics vary the pattern of behavior isremarkably similar.
As
shown
in table 1, the vast majority ofsubjects generated significant oscillations.Only 4
subjects(8%)
achieved equilibrium before theend
ofthe trial.5.
Proposed
decision ruleand
estimation resultsThe
qualitative similarity of the results suggests the subjects, though notbehav-ing optimally, used heuristics with
common
features.The
decision rule proposed herewas
used in the original simulation
model upon which
the experiment is based [Sterman (1985)]and
is a variant ofrules long used inmodels
ofcorporateand
economic
systems[Samuelson
(1939), Metzler (1941), Holt et al. (1960), Forrester (1961),
Low
(1980)].The
ruledetermines ordersfor capital
O
as a function ofinformation locally available to an individualfirm.
Such
information includes the current desired rate ofproduction P*, current productioncapacity C, the rate ofcapital discards
D,
the supply lineSL
oforders for capacitywhich
thefirm has placed but not yet received, and the capital acquisition lag A:
Ot=/(P*t,Ct,Dt,
SLt.At). (17)D-3976
10for the
adequacy
ofthe capital stockAC
and an adjustment for theadequacy
of the supply lineASL.
Accounting for the nonnegativity constrainton
gross investmentand
allowing for anadditive disturbance E yields:
Ot
=MAX(0,
Dt +
ACt
+ASLt
+ Et). (18)Each
of the three terms represents a separate motivation for investment.To
maintain the existing capital stock at its current value, the firmmust
orderenough
to replace discards.The
firm is
assumed
to adjust ordersabove
orbelow
discards in response totwo
additionalpressures.
The
adjustment for capitalAC
represents the response to discrepanciesbetween
the desired and actual capital stock.
The
adjustment for supply lineASL
represents theresponse to the quantity of capital in the supply line, that is, capital
which
has been orderedbut not yet received.
The
adjustment for capital isassumed
to be proportional to thegap between
desiredcapital stock
DK
and the actual stock. Desired capital is determinedfrom
the desired rate of productionP*
and the capital/outputratio k:ACt
=
aK(DKt
-Kt
)
(19)
DKt=KP*t
(20)The
adjustment for capital creates a straightforward negative feedback loop.When
desiredproduction exceeds capacity orders for capital will rise
above
discards until thegap
is closed.An
excess ofcapital similarly causes orders to fallbelow
replacement until the capital stockfalls to
meet
the desired level. Note, however, thatdue
to the capital acquisition lag thisnegative loop contains a significant phase lag element, introducing the possibility of
oscillatory behavior.
The
aggressiveness ofthe firm's response is determinedby
theadjustment parameter a^^.
The
adjustment for the supply line is formulated analogously. Orders are adjusted inproportion to the discrepancy
between
the desired supply lineDSL
and
the actual supply line:ASLt
=
asL(DSLt
- SLt ). (21)acquisition process such as orders in planning, orders in the backlog of the supplier,
and
orders under construction. In the experiment these are aggregated into the backlog of unfilled
orders B, thus
SL=B.
The
desired supply line is givenby
DSLt
= Dt
-At- (22)To
ensure an appropriate rate ofcapital acquisition a firmmust
maintain a supply linepropor-tional to the capital acquisition delay. Ifthe acquisition delay rises, firms
must
plan for andorder
new
capital farther ahead, increasing the desired supply line.The
desired supply line isbased
on
the capital discard rate-
a quantity readily anticipatedand
subject to littleuncer-tainty.
To
illustrate the logic of the supply line adjustment, imagine an increase in desiredcapital. Orders will rise
due
to thegap between
desired and actual capital stock.The
supplyline will fill. Iforders in the supply line
were
ignored (OgL=0), the firmwould
place ordersthrough the capital stock adjustment, promptly forget that these units
had
been ordered, andorder
them
again.The
supply line adjustment creates a second negative feedback loopwhich
reduces orders for
new
capacity ifthe firm finds itselfovercommitted
to projects in thecon-struction pipeline,
and
boosts orders if there are too few. It alsocompensates
for changes inthe construction delay, helping ensure the firm receives the capital it requires to
meet
desiredproduction.
OgL
reflects the firm's or subject's sensitivity to the supply line.The
decision rule in equations (18-22) is intendedly quite simple. Orders aredeter-mined on
the basis ofinformation locally available to thefirmitself. Information an individualfirm is unlikely orunable to have, such as the value ofthe equilibrium capital stock or the cost
minimizing solution to the nonlinear optimal control problem, is not used.
The
firm'sforecast-ing process is rather simple: capacity is built to
meet
currentdemand.
The
rule includesappropriate nonlinearity to ensure robust results: orders remain nonnegative even if there is a
large surplus ofcapital.
The
rule also expresses the corrections to the order rate as linearfunctions of the discrepancies
between
desired and actual quantities.Undoubtedly
theorder-ing rules offirms are
more
complex,and
otherwork
such asSenge
(1980) considers variousD-3976
12expansion ofthe
more
complex
underlying investment rule.A
large literature in psychologydocuments
the ability oflinear decision rules to provide excellentmodels
of decision-making,even
when
interactions areknown
to exist[Dawes
(1982),Camerer
(1981)].It is useful to interpret the rule in terms of the cognitive processes ofthe agents.
The
ordering rule can be interpreted as an
example
of the anchoring and adjustment heuristic[Tversky and
Kahnemen
(1974)]. In anchoring and adjustment, a subject attempting todetermine an
unknown
quantity first anchorson
aknown
reference point and then adjusts forthe effects of othercues
which
may
be less salient orwhose
effects are obscure.For
example, a firmmay
estimate next year's salesby
anchoringon
current sales and adjustingfor factors such as
macroeconomic
expectations, anticipated competitor pricing, etc. Studieshave
shown
anchoring and adjustment to be a widespread heuristic. Indeed, anchoring is socommon
thatmany
people use it inappropriately.Numerous
studieshave
documented
situations in
which
the adjustments are insufficient or inwhich judgments
are inadvertentlyanchored to meaningless cues [Hogarth (1987)]. In the experimental context, the capital
discard rate forms an easily anticipated and interpreted point ofdeparture for the
determination oforders.
Replacement
of discards willkeep
the capital stock of the firmconstant at its current level (assuming the capital acquisition delay remains constant).
Adjustments are then
made
in response to theadequacy
of the capital stock and supply line.No
assumption ismade
that these adjustments are in anyway
optimal or that firms actually calculate the order rate as given in the equations. Rather, pressures arisingfrom
the factoryfloor,
from
the backlogofunfilled orders and disgruntled customers, andfrom
corrmiitments toprojects in the construction pipeline cause the firm to adjust its investment rate
above
orbelow
the levelwhich would
maintain the status quo.For
agents in the experiment theinterpretation is parallel: replacing discards to maintain the status
quo
is a natural anchor.Adjustments based
on
theadequacy
ofthe capital stock and supply line are thenmade.
Again, there is
no
presumption that subjects explicitly calculate the adjustments using theThe
adjustment parametersa^
anda^^
reflect the firm's or subject's response todisequilibrium: large values indicate an aggressive effort to bring capacity
and
the supply linein line with their desired levels; small values indicate a higher tolerance for, ornegligence of,
discrepancies
between
desired and actual stocks. For both the real firmand
the subjects, thehypothesis that decisions are
made
via a heuristic such as theproposed
rule is motivated bythe observation that the complexity of determining the optimal rate of investment
overwhelms
the abilities of the
managers and
the time available tomake
decisions[Simon
(1982)].To
test the rule only thetwo
adjustment parametersa^
andOsl
need
be estimated.All other data required to determine orders are presented directly to the subjects.
Maximum
likelihood estimates of the parameters for each trial
were
found by grid search oftheparameter space, subject to the constraints
a^,
CgL
^
0-Assuming
the errors e are Gaussian white noise then themaximum
likelihood estimates of such nonlinear functions are given bythe parameters
which minimize
thesum
of squared errors.Such
estimates are consistent andasymptotically efficient,
and
the usual measures of significance such as the t-test areasymptotically valid [Judge et al. (1980)].
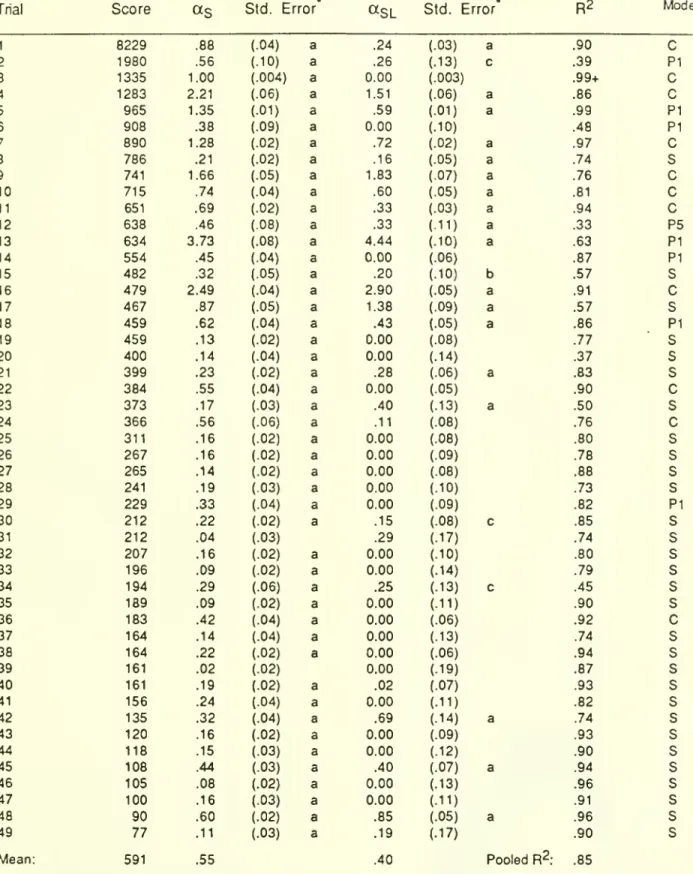
Estimates for
49
trials together with t-statistics are given in table 2.The
model'sability to explain the ordering decisions of the subjects is excellent.
R2
variesbetween
33%
and
99+%,
with an overallR^
for the pooled sample of 85%.'* All buttwo
ofthe estimates ofa^
are highly significant.The
supply line adjustment parameter is significant in22
trials,and
not significantly different
from
zero in 27.Of
course, zero is a legitimate value forQsl, andthe estimate of
a^L
for 23 subjects is zero.The
estimates ofa^L
rangefrom
to 4.4 while themean
95%
confidenceband
for the zero estimates is .17, less than4%
ofthe range ofa^L,indicating that the
23
zero estimates ofttjL are quite tight.6.
Simulation
of the estimated decision rulesThe
estimation results indicate that themodel
is agood
representation of thesub-jects' decision-making.
Sterman
(1988a) analyzes the estimated parametersand
identifiesD-3976
14One
ofthese is the tendency for subjects to give insufficient attention to the supply line, asindicated by the large
number
of small estimates for a^L-By
ignoring the supply line subjectscontinue ordering even after the construction pipeline contains sufficient units to correct any
stock discrepancy.
Such
overordering is a major source ofinstability in the closed loopsys-tem.
The
present concern, however, is the relationshipbetween
the estimated parametersand the regimes of behavior in the model.
Even
though the subjectsdo
notbehave
optimallyin disequilibrium,
one
might expect that their decision ruleswould
ultimately return thesys-tem
to alow
cost equilibrium. Simulation ofthe estimated rulesshows
this is not the case.The
rightmostcolumn
ofTable 2 indicates themode
of behavior producedby
simulation of the decision rule with the estimated parameters.
The
parameters estimated forthirty subjects
(61%)
are stable.Most
of these produceoverdamped
behavior of the capitalstock in response to the step input.
Seven
parameter sets produce limit cycles of period 1and one produces period 5.
The
parameterswhich
characterize eleven subjects(22%)
produce chaos. Inspection of table 2
shows
that the subjectswhose
parameters are stableperformed best in the task while those
whose
parameters produce periodic behavior or chaosgenerally
had
the highest costs.1-way
ANOVA
confirmed the relationship: the costsachieved by the subjects strongly
depend on
themode
produced by
simulation oftheestimated decision rule (p<.01
when
themodes
were coded
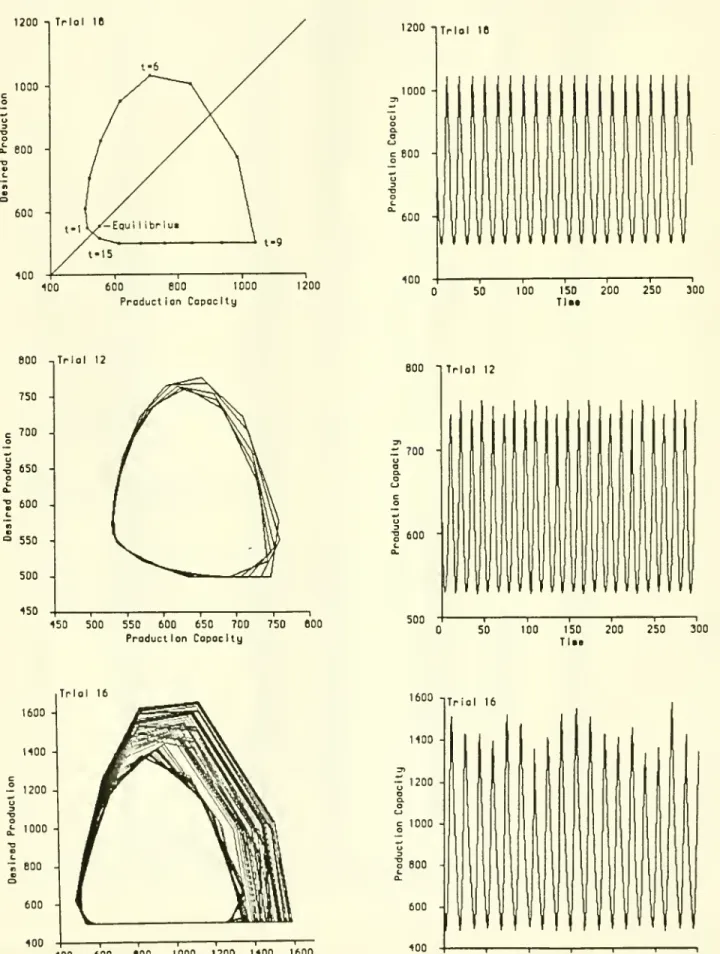
as stable, periodic, or chaotic).Figure 4
shows
timedomain
and phase portraits for simulations of several sets ofestimated parameters. In all cases the orbits are roughly egg-shaped, with clockwise flow.
To
explicate the dynamics, consider figure 4a,showing
theperiod 1 limit cycleproduced
bythe parameters of subject 18 (.62, .43;
R^
=
.86). In equilibrium desired productionmust
equalcapacity; the locus of such points is given by the 45° line.
Below
the line there is excesscapacity and the system is linear and stable;
above
it there is insufficient capacity and thesystem is highly nonlinear and unstable.
Given
the steady input ofordersfrom
thegoods
sector of
500
units, the equilibrium point for the system as awhole
lies at (555.55, 555.55).and
capital sectorgrow. Rising desired production induces additional ordersfrom
the capitalsector, causing rapid increase in desired production. Capacity, held
down
by
the inability ofthe capital sector itself to fill all orders and the consequentrationing ofoutput, lags behind.
As
capital stock grows, however,new
orders placed by the capital sector slow,and
thebacklog is shipped at an increasing pace. Desired production peaks at t=6. Capacity
now
grows
rapidly as the capital sector is increasingly able to fill orders.Between
t=7 and t=8capacity overtakes desired production,
which
falls rapidly since capacity isnow
largeenough
to deliver the entire supply line in
one
period.As
desired productionplummets,
capacityreaches its
peak
and
capital sector orders to fall to zero (t=9). Desired production is thensustained only by the
exogenous
demand
ofthegoods
sector (500 units/period).Deprecia-tion causes capital stock to decline slowly, until at t=15 capital stock has fallen to a level
low
enough
to cause the capital sector to placenew
orders.However,
thesenew
orders causedesired production torise,
and by
the next period capacity isonce
again insufficient to satisfydemand,
initiating the next cycle.The
dynamics
are thesame
for the period multiples andchaotic solutions, except that the trajectory does not close after
one
orbit.The
trajectories of chaotic systems are sensitive to initial conditions.The
routes ofnearby points through phase space diverge exponentially until the initial difference in the
positions balloons out to fill the entire attractor.
The
time average rate ofexponentialdivergence of neighboring points is given by the largest
Lyapunov
exponentL+
[Wolf
et al.(1985)]
which
may
be defined asL^=lim|log2|xI
(23)where
the separation vector x connects neighboring points in phase space.A
positiveexponent
means
nearby points divergeand
indicates chaos; a negativeexponent
denotesconvergence
of nearby points.Because
theLyapunov
exponents describe the long-termD-3976
16that average, including temporary reversals of sign. Nevertheless, a
rough
estimate ofL+
isgiven
by
the slope ofL^(t)t=log2|x| (24)
over long intervals.
To
calculateL^(t)t for each of the estimated decision rules, productioncapacity
was
jjerturbed byone
part in a trillion in the 10,0(X)th period.The
separation vector|x|
was measured
in the two-dimensional space defined by production capacity and desiredproduction. Since desired capacity is the
sum
of thetwo
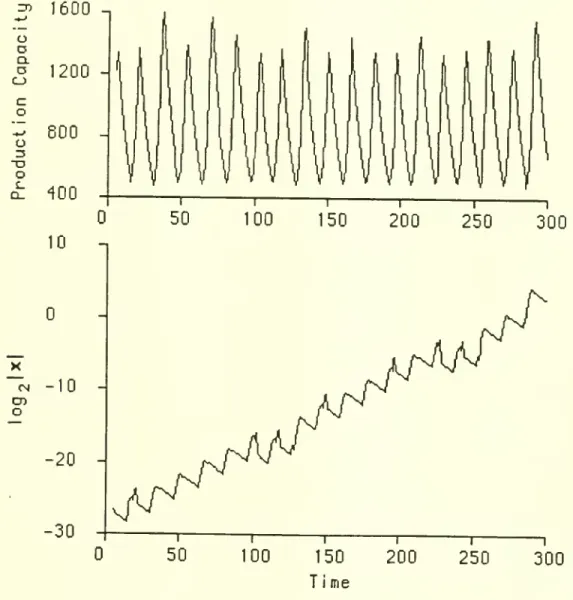
backlogs, this output space reflectsall three state variables in the system. Figure 5
shows
the evolution ofL^(t)t for theparameters of subject 16 after the perturbation.
The
phase plot for these parameters isshown
in figure 4.The
average slope of L^(t)t is clearly positive, indicating the system ischaotic.
The
magnitude
oftheLyapunov
exponent is approximately .1 bits/period.The
values ofL^
for the subjectswhose
decision rules are chaotic rangefrom
about .01 to .1 bits/period,with an average of about .04 bits/period.
The
magnitudes of the exponents determine the rate atwhich
information about thestate of the system, and hence the ability to predict its trajectory, is lost.
The
largemea-surement errors in
economic
systems[Morgenstem
(1963)] dictate severe limitson
pre-dictability in chaotic systems.
Thus
ifthe states ofthemodel
economy
were
known
with thenot unrealistic
measurement
error of about12%
(3 bits ofprecision), the averageLyapunov
exponent of .04 implies the uncertainty in the trajectory
would
grow
to fill the entire attractorafteronly about 75 periods, corresponding in the experimental system to roughly 5 orbits.
Additional precision buys little in additional predictability: cutting
measurement
error by afactor of
two would
delay the complete loss ofpredictability by less than 2 orbits.Of
coursethese calculations
assume no
external noise, perfect specification of the model, and perfectestimates ofthe parameters, and thus represent an upper
bound on
the prediction horizon.7.
Mapping
theparameter space
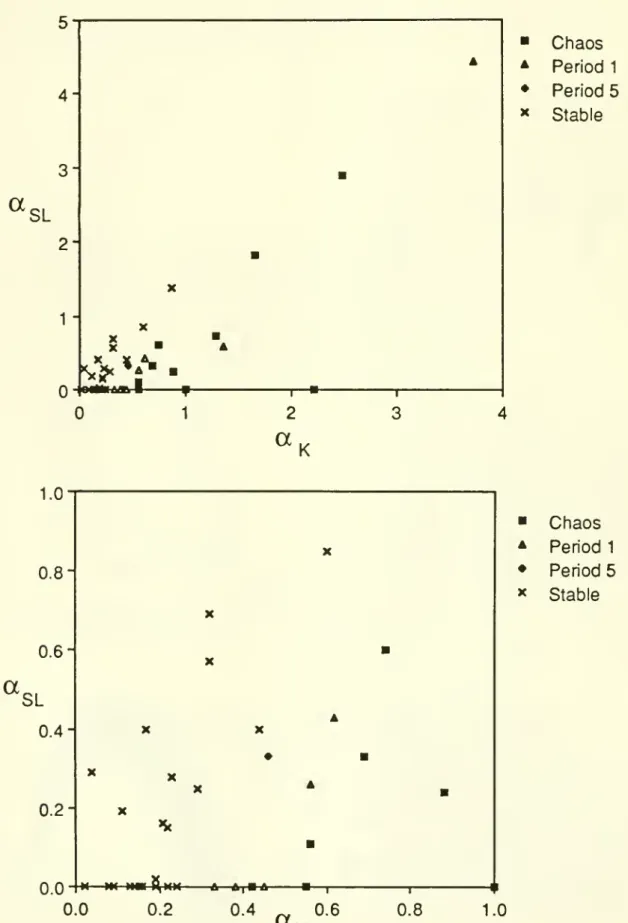
parameters. Figure 6 locates the
modes
of behavior of the estimated decision rules inparameter space.
The
estimated parameters are clustered in the region0<aK<l,
0<asL^l,
with the
few
outside this region falling approximately along the line cxsL=aK. Consistent withintuition, the stable decision rules are confined to the region
where
aj^ is small anda^L
islarge, while the chaotic decision rules generally involved aggressive stock adjustment
and
weak
supply line adjustment.More
aggressive attempts to correct the discrepancybetween
the desired
and
actual capital stock are destabilizing:by
orderingmore
aggressively thesub-ject induces a larger increase in total
demand,
thus exacerbating disequilibrium and encour-aging still larger orders in future periods. Conversely,more
aggressive response to thesupply line is stabilizing
by
constraining orders as the supply line fills.More
formally,a^
determines the gain of the oscillatory negative feedback loop while
ajL
controls thefirst-order, stabilizing supply line loop.
To
test this hypothesis the estimated parameterswere
regressed
on
the log of the cost function S. Costs provide a roughmeasure
ofinstability sincehigh costs indicate large excursions
from
equilibrium (standard errors in parentheses, trial 1deleted as an outlier):
ln(S)
=
5.3 -I-I.TOk-
l.lasL, R2=.43,F=16.8
(N=48). (25)(.13) (.33) (.30)
The
results are highly significant and confirm the overall relationshipbetween
the parametersand
stability.But
is the parameter space assmooth
as these results suggest?Figure 7
maps
the parameter space for0<aK^l
and0<asL^l
in steps of .005,representing over 40,CX)0 simulations.^ This region includes
86%
of the estimated parametersets, clearly
showing
that the fluctuating steady state solutions, including the chaoticsolutions, lie in the managerially meaningful region of parameter space.
The
resultingbifurcation structure is surprisingly structured. First, the
boundary
for the bifurcationfrom
fixed point to cyclic attractors appears to be a straight line, with stable solutions satisfying
asL
>
2.29aK
- .706,R2
= .99946 (N=42). (26)D-3976
18Rasmussen,
Mosekilde, andSterman
(1985)show
that the transitionfrom
local stability toinstability at the equilibriumjx)int involves a
Hopf
bifurcation. In the regionwhere
capacityis inadequate (<))<1) the linearized closed-loop system is oscillatory, but for small values of
a^
orlarge values of a^L. the eigenvalues lie inside the unit circle, producingdamped
behavior and a stable fixed-point attractor.
As
the parametersbecome
less stable (larger Oj^or smaller Csl) the eigenvalues cross the unit circle and the system produces expanding
oscillations.
These
fluctuations are ultimatelybounded by
the nonlinearities, particularly thenonnegativity constraint
on
ordersand
the flexible utilization ofcapacity in equation (1).Inside the region of fluctuating steady state solutions, several features are apparent.
Note
first the striations ofperiodic behaviorwhich
cut across the space at asomewhat
shallower angle than the stability/instability boundary.
The
bands are thicker near thetransition to stability and thinner
away
from
it. Second, note the several large regions inwhich
the periodic solutions are very sparse.Figure 8 magnifies the region .55<aK<.65,
.50<asL^.60
by a factor often in eachdirection.
Both
the chaotic regions and the bands of periodic behavior arenow
seen to containirregularly distributed islands ofother periodicities. Further magnification (not
shown)
reveals still
more
such islands.Such
irregularity is characteristic of the fractal boundariescommon
in the bifurcationmaps
ofmany
systems.Simple though the
model
is, it is capable ofgenerating awide
array ofcomplex
behaviors.
The
complexity of the parameter spaceshows
thateven
small errors in estimatesof the parameters
may
have large qualitative effectson
themode
of behaviorproduced
by thesystem. Indeed, the simulations here
do
not exhaust the possibilities. All the simulationsdescribed here involved
no
external forcing (goods sector orders for capitalwere
constant).Larsen, Mosekilde, and Sterman (1988) have
shown
that sinusoidal forcing ingoods
sectororders (mimicking the effects of the business cycle or othercyclical
modes
in theeconomy)
8. Discussion
It is
common
in the social sciences toassume
that decision-making behavior and thus thedynamics
ofhuman
systems are, ifnot optimal, then at least stable.These
resultsshow
that formal rules
which
characterize actual managerial decisionmaking
can produce anextraordinary range ofdisequilibrium dynamics, including chaos.
Such
complexity suggests strong lessons for modelers ofeconomic
and socialdynamics.
The
experimentshows
that the regimes of fluctuating steady-state behavior,including chaos, lie squarely in the middle ofthe realistic region ofparameter space. In
consequence
modelers can ignore nonlineardynamics
only at theirperil.Models
ofeconomic
and
socialdynamics
should portray the processesby which
disequilibrium conditions arecreated and dissipated.
They
should notassume
that theeconomy
is in or near equilibrium atall times nor that adjustment processes are stable.
Models
should be formulated so that theyare robust in extreme conditions, since it is the nonlinearities necessarily introduced
by
robust formulations that crucially determine the
modes
ofthe system [seeDay
(1984)].At
thesame
time anumber
ofquestions regarding the the generalization of the resultsto the real
world
and the practical significance ofchaosmust
be asked.Chaos
is asteady-state
phenomenon
which
manifests over very long time frames, butmany
policy-orientedmodels
are concerned with transientdynamics
and nearly all with time horizonsmuch
shorterthan those used in the analysis of chaotic dynamics.
For
example
the simulations herewere
run for 10,000 periods or more.
Over
such extended time horizons the parameters ofthesystem cannot be considered static but will themselves evolve with learning, evolutionary
pressures,
and
exogenous
changes in the environment.There
is evidence [Sterman (1988a),Bakken
(1988)] that subjects begin to learn within just afew
cycles, modifying theparameters of their ordering function. It appears that in the present experiment learning
slowly
moves
the subjectsaway
from
the chaotic region towards the region of stability.However,
the existence ofchaosmay
itselfhamper
learning.Even
though deterministicD-3976
20
changes in initial conditions or parameters.
Does
such 'randomness' slow the discovery ofcause and effect by agents in the
economy
and thus hinder learning or evolution towardsefficiency? Indeed, does learning alter the parameters ofdecision rules so that systems
evolve towards or
away
from
the chaotic regime?Some
argue that chaosmay
be adaptive. In a worldwhose
'fitness space' containsmany
local optima, a decision rule that produces chaos,by constantly exploring
new
pathways,may
help a system evolve faster than a stable,incremental decision
making
strategy [Prigogine and Sanglier (1987), Allen (1988)].Chaos
places an upperbound on
prediction, but is thatbound
a binding constraint insocial systems? Real social systems are
bombarded
bybroadband
noise, and it is wellknown
that suchrandom
shocks severely degrade predictability.Does
themagnitude
ofstochastic shocks
swamp
the uncertainty in trajectories causedby
chaos?How
does theexistence of chaotic regimes in a
model
influence its response to p)olicies, and thepredictability of thatresponse? Particularly troubling here is the potential for fractal basin
boundaries in both initial condition
and
parameter space. Policy interventions often implychanges in the parameters ofa decision rule or model.
How
can policy analysis be conductedif the "policy space" contains fractal basin boundaries? In such systems parameter changes
on
the marginmay
produce unpredictable qualitative changes in behavior, as illustrated by thefractal distribution of
modes shown
in figures 7-8. Therefore learning and experiencemay
nottransfer tocircumstances
which
differonly slightly. Learning often involves a hill-climbingprocedure of incremental
movement
towards a profit-maximizingpeak
in parameter space.How
well can agents negotiate that spacewhen
the landscape not only hasmany
localoptima but is fractal as well?
The
development
ofprinciples for policy design in such systemsis a major area for future research.
The
practical significance ofchaos and other nonlinearphenomena
in policy-orientedmodels
ofsocial andeconomic
behavior remains clouded whilethese questions are unanswered.
Some
of these questionsmay
be resolvedby
further9.
Conclusions
The
discovery ofnonlinearphenomena
such as deterministic chaos in the physicalworld naturally motivates the search for similar behavior in the world of
human
behavior. Yetthe social scientist faces difficulties in that search
which do
not plague the physicist, at leastnot to the
same
degree. Aggregate data sufficient for strong empirical tests simplydo
notexist for
many
of themost
important social systems. Social systems are not easily isolatedfrom
the environment.The
huge
temporaland
spatial scales ofthese systems, vastnumber
of actors, costs
and
ethical concernsmake
controlled experimentson
the systems themselvesdifficult at best. Finally, the laws of
human
behavior are not as stable as the laws ofphysics.Electrons
do
not learn, innovate, collude, or redesign the circuits inwhich
they flow.Laboratory experiments appear to provide a fruitful alternative. Since experiments
on
actual firms
and
nationaleconomies
are infeasible, simulationmodels
of these systemsmust
be used to explore the decision
making
heuristics of the agents.Such
experiments create'microworlds' in
which
the subjects face physical and institutional structures, information, andincentives
which
mimic
(albeit in a simplified fashion) those ofthe real world. It appears tobe possible to quantify the decision
making
heuristics usedby
agents in such experimentsand
explain theirperformance well. Simulation then provides insight into thedynamic
properties of the experimental systems.
These
results demonstrate that chaos can beproduced
by the decisionmaking
processes of real people.
The
experiment presented subjects with a straightforward task in acommon
and
importanteconomic
setting.The
subjects' behavior ismodeled
with a highdegree of accuracy
by
a simple decision rule consistent with empiricalknowledge
developedin psychology
and
long used ineconomic
models. Simulation ofthe rules produces chaos for asignificant minority ofsubjects.
Chaos
may
well be acommon
mode
of behaviorin social andeconomic
systems, despite the lack ofsufficient information to detect it in aggregate data.D-3976
22
Notes
1 Journal of
Economic
Theory,40
(1) 1986, Journal ofEconomic
Behaviorand Organization, 8(3),
September
1987;System
Dynamics
Review,
4, 1988,European
Journal ofOperationalResearch, 35, 1988. See also
Goodwin,
Kruger, and Vercelli (1984)and
Prigogineand
Sanglier (1987).
2. Conservation of output requires
P
=
A
+
AG.
But
A
+
AG
=
B(t)+
BG({)=
(})(B+
EG)
=(P/P*)(B +
BG)
= P.By
Little's law, the average residence time ofitems in a backlog is theratio ofthe backlog to the outflow, here given by
A
=
(B +BG)/(A
+ AG).
By
eq. 4-5, (B +BG)/(A
+
AG)
=
(B+
BG)/(B-(t)+
BG<t))=
1/<|).3. Disks suitable for
IBM
PC's and
compatibles, or for theApple
Macintosh, are availablefrom
the author.4.
Note
that the function 0=f(-) does not contain an estimated regression constant.Thus
the correspondence of the estimated and actual capital orders, notjust their variation around
mean
values, provides an importantmeasure
of the model's explanatory power. Since theresiduals e need not satisfy Zct
=
0, the conventionalR2
is not appropriate.The
alternativeR2
=
1 - Xct^ /ZO,2
is used (Judge et al. 1980). ThisR2
can be interpreted as the fraction ofthe variation in capital orders around zero explained by the model.
5.
Each
simulationwas
10,000 periods long.The
first8000 were
discarded in assessing thesteady state
mode
of behavior. 10 digit accuracywas
used.A
simulationwas assumed
to beReferences
Allen, P., 1988,
Dynamic
models
of evolving systems.System
Dynamics
Review,
4.Bakken,
B., 1988, Learning system structure by exploringcomputer
games, presented at the1988
InternationalSystem
Dynamics
Conference,San
Diego,CA,
July.Bamett,
W.
and
P.Chen,
1988,The
aggregation theoreticmonetary
aggregates are chaoticand
have strange attractors: an econometric application of mathematical chaos, in Bamett,Bemdt, and White
(eds.),Dynamic
Econometric
Modeling,Cambridge
University Press,Cambridge.
Benhabib, J. and R.
Day,
1981, Rational choice and erratic behavior.Review
ofEconomic
Studies, 48, 459-471.
Brehmer,
B., 1987,Systems
designand
the psychology ofcomplex
systems, inRasmussen,
J.and
P.Zunde
(eds). Empirical Foundations of Informationand
Software Science III,Plenum,
New
York.Brock,
W.,
1986, Distinguishingrandom
and
deterministic systems: abridged version. Journalof
Economic
Theory, 40, 168-195.Camerer,
C,
1981, General conditions for the success of bootstrapping models,Organizational Behavior and
Human
Performance, 27, 411-422.Candela, G.,
and
A. Gardini, 1986, Estimation ofa non-linear discrete-timemacro
model.Journal of
Economic Dynamics
and
control, 10, 249-254.Chen,
P., 1988, Empirical and theoretical evidence ofeconomic
chaos.System
Dynamics
Review,
4, 81-108.Dana,
R.,and
P. Malgrange, 1984,The
dynamics
ofa discrete version ofagrowth
cyclemodel, in Ancot, J. (ed.). Analysing the Structure of
Econometric Models,
MartinusNijhoff,
The
Hague.Dawes,
R., 1982,The
robust beauty ofimproper linearmodels
in decision making, inD-3976
24
Cambridge
University Press,Cambridge.
Day,
R., 1982, IrregularGrowth
Cycles,American
Economic
Review,
72, 406-414.Day,
R., 1984, DisequilibriumEconomic
Dynamics:
A
Post-Schumpeterian Contribution,Journal of
Economic
Behaviorand Organization, 5, 57-76.Day,
R., andW.
Shafer, 1985, Keynesian chaos. Journal ofMacroeconomics,
7, 277-295.Einhom,
H., D. Kleinmuntz, and B. Kleinmuntz, 1979, Linear regressionand
process-tracingmodels
ofjudgment. PsychologicalReview,
86, 465-485.Forrester, J. 1961, Industrial
Dynamics,
MIT
Press,Cambridge.
Goodwin,
R., 1951,The
nonlinear accelerator and the persistence of business cycles,Econometrica, 19, 1-17.
Goodwin,
R.,M.
Kruger,and
A. Vercelli, 1984, Nonlinearmodels
offluctuating growth,Springer Verlag, Berlin.
Grandmont,
J.-M., 1985,On
endogenous
competitive business cycles, Econometrica, 53,995-1046.
Grassberger, P.,
and
I. Procaccia, 1983,Measuring
the strangeness of strange attractors,Physica,
9D,
189-208.Grether, D.,
and
C. Plott, 1979,Economic
theory of choice and the preferencereversalphenomenon, American
Economic
Review, 69, 623-638.Hogarth, R., 1987,
Judgment
and Choice,2nd
ed., John Wiley, Chichester.Hogarth, R., and
M.
Reder, 1987, Rational Choice:The
contrastbetween economics
andpsychology. University of
Chicago
Press, Chicago.Holt,
C,
F. Modigliani, J.Muth,
H. Simon, 1960, PlanningProduction, Inventories, andWork
Force, Prentice-Hall,
Englewood
Cliffs, N.J.Judge et al., 1980,
The
Theory
andPractice ofEconometrics,Wiley,New
York.Larsen, E., E. Mosekilde, and J. Sterman, 1988, Entrainment
between
theeconomic
longwave
and othermacroeconomic
cycles, presented at theIIASA
Conferenceon
Low,
G., 1980,The
multiplier-acceleratormodel
of business cycles interpretedfrom
a systemdynamics
perspective, in J. Randers (ed.), Elements of theSystem
Dynamics
Method,
MTT
Press,Cambridge.
MacKinnon,
A., and A. Wearing, 1985, Systems analysis anddynamic
decision making, ActaPsychologica, 58, 159-172.
Metzler, L., 1941,
The
natureand
stability ofinventory cycles.Review
ofEconomic
Statistics,23, 113-129.
Morgenstem,
O., 1963,On
theAccuracy
ofEconomic
Observations,2nd
ed., PrincetonUniversity Press, Princeton.
Plott, C. R., 1986, Laboratory experiments in economics:
The
implications of posted priceinstitutions. Science,
232
(9May),
732-738.Prigogine, L,
and
M.
Sanglier, 1987,Laws
ofnatureand
human
conduct.Task
Force ofResearch Information
and
Study on Science, Brussels.Ramsey,
J.,and
H.-J.Yuan,
1987, Bias and error bars in dimension calculations and theirevaluation in
some
simple models,New
York
University.Ramsey,
J., C. Sayers,and
P.Rothman,
1988,The
statistical properties ofdimensioncalculations using small data sets:
some
economic
applications,RR88-10,
New
York
University
Department
ofEconomics.
Rasmussen
and
Mosekilde, 1988, Bifurcationsand
chaos in a genericmanagement
model,European
Journal ofOperational Research, 35, 80-88.Rasmussen,
S., E.Mosekilde
and J. Sterman, 1985, Bifurcationsand
chaotic behavior in asimple
model
oftheeconomic
long wave,System
Dynamics
Review,
1, 92-1 10.Samuelson, P. A., 1939, Interactions
between
the multiplier analysisand
the principle ofacceleration.
The Review
ofEconomic
Statistics, 21, 75-78.Senge, P., 1980,
A
systemdynamics
approach to investment function formulation and testing,Socio-Economic
Planning Sciences, 14, 269-280.D-3976
26
Slovic, P.
and
S. Lichtenstein, 1983, Preference reversals: a broaderperspective,American
Economic
Review,
73, 596-605.Smith, V. L., 1982,
Microeconomic
systems as an experimental science,American
Economic
Review, 72
, 923-955.Smith, V. L., 1986, Experimental
methods
in the politicaleconomy
ofexchange, Science, 234,(10 October), 167-173.
Sterman, J. D., 1985,
A
behavioralmodel
oftheeconomic
long wave.Journal ofEconomic
Behavior and Organization, 6, 17-53.
Sterman, J. D., 1987, Testing behavioral simulation
models
by direct experiment.Management
Science, 33 , 1572-1592.Sterman,J. D., 1988a, Misperceptions offeedback in
dynamic
decision making, OrganizationalBehavior and
Human
Decision Processes, forthcoming.Sterman, J. D., 1988b,Eteterministic chaos in
models
ofhuman
behavior: Methodologicalissues
and
experimental results.System
Dynamics
Review,
4, 148-178.Sterman, 1988c,
Modeling
managerial behavior: Misperceptions offeedback in adynamic
decision
making
experiment,Management
Science, forthcoming.Sterman, J. D.
and
D. L.Meadows,
1985,STRATEGEM-2:
amicrocomputer
simulationgame
ofthe Kondratiev Cycle, Simulation
and
Games,
16, 174-202.Stutzer, M., 1980, Chaotic
dynamics
andbifurcation in amacro
model.Journal ofEconomic
Dynamics
and
Control, 2, 353-376.Takens, P., 1985, Distinguishing deterministic and
random
systems, in Borenblatt,G,
G.looss, and D. Joseph (eds.). Nonlinear
Dynamics
and
Turbulence, Pitman, Boston. Tversky, A. and D.Kahneman,
1974,Judgment
under uncertainty: heuristicsand
biases.Science. 185 (27 September), 1124-1131.
Wolf, A., J. Swift, H. Swinney, and J. Vastano, 1985, Determining
Lyapunov
exponentsfrom
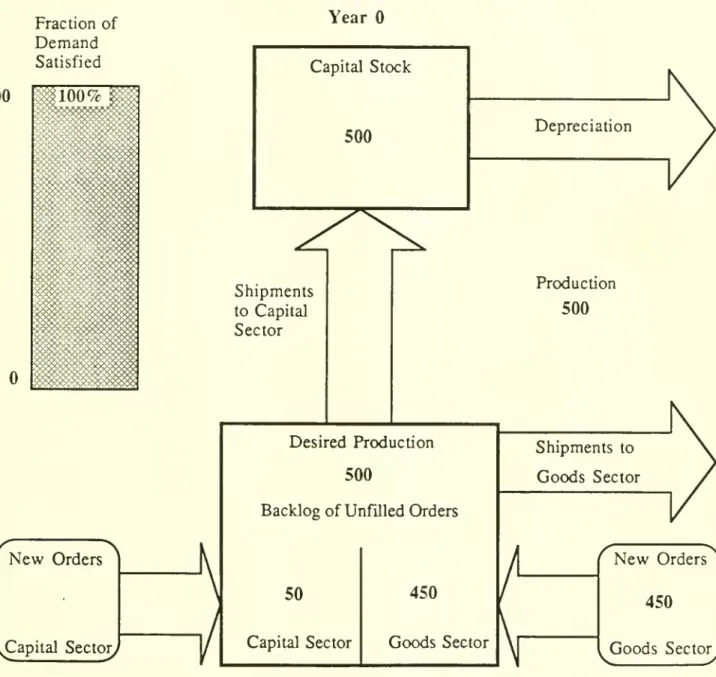
aFigure 1.
Computer
screenshowing
experimentaleconomy,
initial configuration.The
subject is about to enternew
orders for capital sector.Fraction of
Demand
SatisfiedYear
100
New
Orders ^Capital Sector; Capital Stock500
Shipments
to Capital Sector Desired Production500
Backlog ofUnfilled Orders
50
Capital Sector450
Goods
Sector Depreciation Production500
Shipments
toGoods
SectorV
New
Orders450
Goods
Sector,D-3976
28
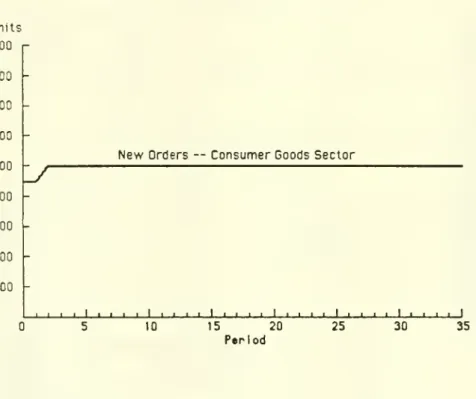
Figure 2.
Exogenous
orders ofthegoods
sector.Each
trial begins in equilibrium. In period 2there is an
unannounced
step increase innew
orders placedby
theconsumer goods
sectorfrom 450
to500
units.Compare
against subjects' behaviorshown
in figure 3. Units 900 r 600 700 -600 -500 -100 -300 -200 100\y
New Orders
—
ConsumerGoods Sector' ' ' I L_I_J L.
10 15 20
Period
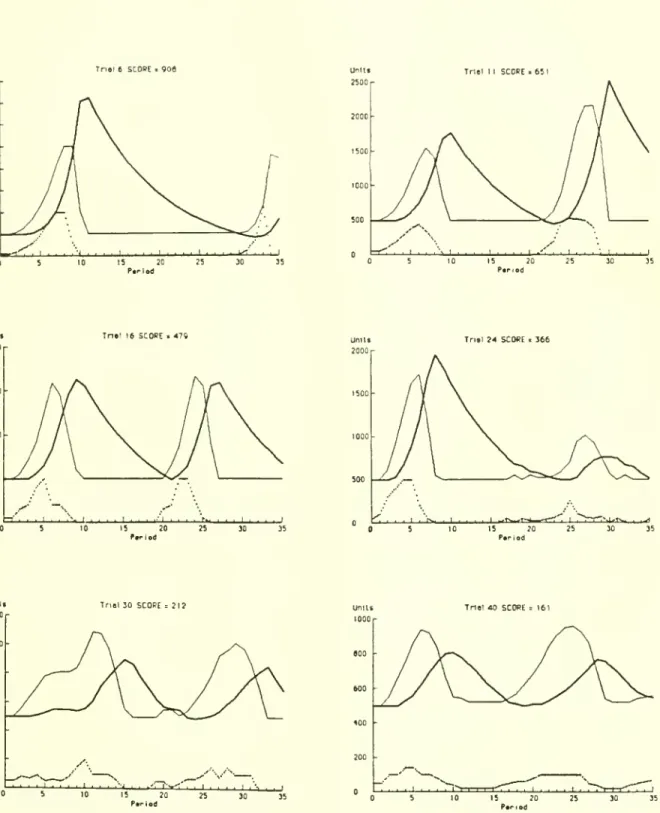
Figure 3. Typical experimental results. N.B.: vertical scales differ.
Desired Producrion Production Capacity Subject'sOrdersforCapital
Tnei6 SCORE•90S TntI
1I SCOCE.651 IS 20 Parlod Tn»l 16SCORE•*T> Tnil24 SCOREt366 Unit! 1200
D-3976
30
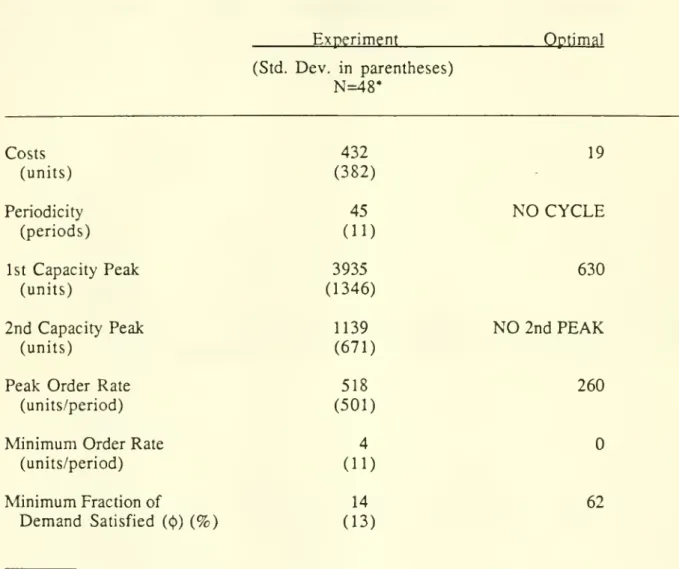
Table 1.
Summary
of experimental results.Experiment
Optimal
(Std.
Dev.
in parentheses)N=48*
Costs
Table 2. Estimated parameters and
mode
of behavior of simulated decision rulesD-3976
32
Figure 4. Simulation ofestimated decision rules.
Note
similarity to the experimental results(figure 3).
-D-3976
33Figure 5. Evolution oflog2|x|, the distance
between
two
neighboring trajectories, forsimulation with parameters of subject 16 (2.49, 2.90) after perturbation ofcapacity by factor of
vl2
10 in period 10,000.
The
largestLyapunov
exponent, given approximately by the averageslope, is positive, indicating that the
two
trajectories diverge exponentiallyand
the system ischaotic. ="
1600
-, CJ-10
-I eno
-20
--30
50
300
00
—
150
Time
200
250
300
D-3976
34
Figure 6.
Modes
of behaviorproduced
by simulation of the estimated parameters.Lower
graph magnifies area