HAL Id: tel-01376512
https://tel.archives-ouvertes.fr/tel-01376512
Submitted on 5 Oct 2016
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Évaluation de l’équilibre postural par capteurs
embarqués : application au yoga
Amina Rouis
To cite this version:
Amina Rouis. Évaluation de l’équilibre postural par capteurs embarqués : application au yoga. Autre. Université de Toulon, 2015. Français. �NNT : 2015TOUL0007�. �tel-01376512�
ÉCOLE DOCTORALE "Mer et Sciences"
HandiBio
Thèse présentée par
:Amina ROUIS
soutenue le : 07 Juillet 2015
pour obtenir le grade de Docteur en (Staps) Spécialité
:
BIOMÉCANIQUEEVALUATION DE L’EQUILIBRE POSTURAL
PAR CAPTEURS EMBARQUES : APPLICATION
AU YOGA
JURY :
M. QUAINE Franck MCF HDR, Université Joseph Fourier, Président du jury
M. BERTUCCI William MCF HDR, Université de Reims-Champagne-Ardenne, Rapporteur
M. RAHMANI Abderrahmane PR, Université du Maine, Rapporteur
M. BLACHE Yves PR, Université de Toulon, Examinateur
M. BENDAHAN Patrice Docteur, Société ESPHI, Invité
M. GORCE Philippe PR. Université de Toulon, Directeur de thèse M. REZZOUG Nasser MCF HDR Université de Toulon, Co-encadrant
ii
iii
“Life is not easy for any of us. But what of that? We must have perseverance and above all confidence in ourselves. We must believe that we are gifted for something and that this thing must be attained.”
iv
REMERCIEMENTS
Dans le cadre de ma thèse, je tiens à remercier le Pr. Philippe Gorce, mon directeur de thèse ainsi que le Dr. Nasser Rezzoug (co-encadrant) pour m’avoir accueillie au sein du laboratoire HandiBio EA 4322.
J’adresse aussi tous mes remerciements au Dr. Patrice Bendahan et au Dr. Xavier Nesi gérants de la société ESPHI pour m’avoir permis d’intégrer le projet BodyScoring et pour m’avoir accueilli dans leur société.
J’exprime mes vifs remerciements au Conseil Général du Var, à la Région Provence-Alpes Côte d’Azur et au fond Européen FEDER qui par leur financement m’ont permis d’effectuer mon travail de thèse dans de bonnes conditions matérielles.
Mes remerciements les plus sincères s’adressent également au Pr. Abderrahmane Rahamani et au Dr. William Bertucci pour l’honneur qu’ils me font d’être rapporteurs de mon travail. Enfin, j’exprime toute ma reconnaissance et ma haute considération aux membres du jury : le Pr. Yves Blache et les Dr. Franck Quaine et Patrice Bendahan et qui m’ont fait l’honneur de juger mon travail.
Que tous mes vifs remerciements soient adressés à mon mari et tous les membres de ma famille pour leur soutien et leur confiance. Aussi, je remercie mes collègues et mes amis du laboratoire HandiBio et toutes les personnes qui ont participé de près ou de loin à la réalisation de ce projet.
v
RÉSUMÉ
Les pathologies associées à la sédentarité, au vieillissement et la perte d’autonomie qui en résulte sont des enjeux sociétaux forts pour les années à venir. Ainsi, en s’appuyant sur les moyens modernes offerts par les TIC, peu couteux et portables, il apparait utile de proposer des outils et méthodologies permettant de quantifier de manière rigoureuse les paramètres biomécaniques liés à la motricité. En effet, évaluer ses performances et connaitre ses capacités physiques pourrait être une source de motivation afin d’agir pour modifier ses habitudes de vie et adopter une pratique physique régulière. Dans cette optique, le projet BodyScoring propose une solution innovante avec de nouveaux services associés. Elle regroupe d’une part, une technologie embarquée communicante de mesure de l’activité physique et, d’autre part, des applications web et mobile permettant d’offrir les services nécessaires à l’évaluation de la motricité et au suivi de l’activité physique. En utilisant un accéléromètre, un gyromètre et un magnétomètre, ce projet comporte deux applications. La première vise à évaluer la marche. La seconde, qui fait l’objet du présent travail de thèse, a pour objectif d’évaluer les capacités posturales au travers du support de 2 exercices de Yoga.
L’objectif de la première partie de la thèse a été de valider un dispositif prototype appelé BodyTrack dans le cadre de l’évaluation des oscillations posturales. Cette validation a été effectuée en comparant les données stabilométriques fournies le prototype attaché au niveau de région lombaire (L3-L4) à celles fournies par une plateforme de force dédiée à la stabilométrie. Les conditions expérimentales consistaient à exécuter 2 exercices de Yoga de difficulté différente constitués de phases statiques entrecoupées de mouvements. Lors de leur exécution par les sujets, un ensemble de paramètres stabilométriques pertinents préalablement sélectionnés ont été évalués. Ainsi, la répétabilité à court terme a été évaluée en utilisant le coefficient de corrélation intra-classe (ICC) et l’erreur standard de mesure SEM, la capacité de discrimination entre la condition yeux ouverts et yeux fermés est évaluée et enfin la corrélation entre paramètres accélérométriques et ceux issus de la plateforme de force est déterminée. L’accéléromètre à bas cout a montré un niveau de répétabilité, de capacité discriminante similaire à celle de la plateforme de force. Les paramètres d’amplitude ont montré une bonne corrélation avec ceux issus des mesures de la plateforme de force et notamment les paramètres liés au jerk.
A la suite de cette validation, une méthodologie est proposée afin d’évaluer la performance motrice selon 3 facteurs. Le premier considère le maintien de l’équilibre postural lors des phases statique des deux exercices. Il est basé sur la sélection des paramètres stabilométriques pertinents qui résument l’information contenue dans l’ensemble de ceux qui ont été évalués. A la suite, d’une normalisation afin de tenir compte de l’influence des paramètres anthropométriques et biomécaniques, une analyse en composantes principales a été effectuée afin de sélectionner des paramètres non redondants. Le
vi
deuxième facteur évalue la durée de ces phases statiques et le troisième permet de vérifier la bonne exécution de la posture. Ce dernier a été évalué, en premier lieu, à l’aide d’un système optoélectronique et des pistes de solution utilisant cinq capteurs inertiels posés sur le corps ont été proposés. L’ensemble des facteurs mesurés permet de construire une vue d’ensemble de l’exercice effectué et rend compte de la performance motrice.
Mots clés : biomécanique, contrôle postural, capteurs inertiels, accéléromètre, oscillations posturales,
centre de pression, plateforme de force, score d’évaluation des performances, analyse en composantes principales, exercices de Yoga, paramètres stabilométriques.
vii
ABSTRACT
Balance is a key element for daily activity, that’s making balance training, is important for everyone. In the aim to promote physical activity and change exercise behaviour, BodyScoring’s balance application, using an inexpensive mobile device which contains accelerometers, gyroscope and magnetometer, propose tow Yoga exercises, for balance improvement, and calculates a score to determine the level skills and to share it with friends. First, this thesis examines the validity, reliability and the sensitivity of accelerometer data by comparing them to force platform data. Second, a new tool for performance evaluation was developed.
In the first stage, the comparison was made by recording postural sway, during quiet standing postures from ‘Tadasana and Vrksasana’ Yoga exercise, with a wearable accelerometer placed at the L3-L4 vertebra together with a force platform. Time as well as frequency domain were assessed during three repetitions of the exercise with both opened and closed eyes. For both sensors, reliability was evaluated with ICC and SEM, the discriminative capacity between sensory conditions was also tested as well as the correlation between the obtained parameters. The low cost accelerometer presented similar level of reliability, discriminative capacity than the force platform according to the Yoga exercises phases and amplitude parameters where well correlated. Among all the accelerometric parameters, the Jerk appears to have the best metrological characteristics.
Then, one hundred seven stabilometric parameters are computed from the one-dimensional, two-dimensional and three-two-dimensional acceleration time series. In the aim of avoiding the redundancy and allowing a simple interpretation of those parameters, we performed a feature selection process based on principal component analysis. The results suggest that all measures can be characterized by sixteen parameters. In addition of the sample entropy estimates for the AP, ML and V acceleration time series, those parameters selected are used to evaluate the postural performance. Finally, a postural scoring system is developed. Based in three key factors, it allows evaluating the postural performance, the duration and the appropriate execution of the exercise. The graphical representation of the score allowed a straightforward and simple interpretation of results.
Keywords: Inertial sensors, Postural Balance, Postural sway, wearable sensors, low cost,
accelerometer, COP, Yoga exercises, force platform, Posture, Stabilometric parameters, Principal component analysis, Normalization, balance scoring.
viii
TABLE DES MATIERES
REMERCIEMENTS ... IV
RÉSUMÉ ... V
ABSTRACT ...VII
TABLE DES MATIERES ... VIII
LISTE DES TABLEAUX ...XII
LISTE DES FIGURES ... XVI
LISTE DES SIGLES ET ABRÉVIATIONS ... XXI
INTRODUCTION ... 1
CHAPITRE 1 EVALUATION DE L’ÉQUILIBRE POSTURAL ... 6
1.1 Notions et concepts de contrôle postural ... 6
1.1.1 Le système postural ... 8
1.1.2 L’orientation spatiale ... 18
1.1.3 Le contrôle de l’équilibre dynamique ... 18
1.1.4 Processus cognitifs ... 18
1.1.5 Équilibre et stabilité posturale ... 21
1.1.6 Facteurs influençant les oscillations posturales ... 28
1.2 Moyens et techniques d’évaluation du contrôle postural ... 34
1.2.1 Évaluations cliniques ... 35
1.2.2 Évaluation instrumentale du maintien de l’équilibre postural ... 39
1.2.3 Synthèse et Conclusion ... 49
CHAPITRE 2 EVALUATION DE L’ÉQUILIBRE POSTURAL : MATÉRIEL ET MÉTHODE 53 2.1 Introduction ... 53
ix
2.3.1 Données accélérométriques ... 57
2.3.2 Mesures de gyromètre ... 59
2.3.3 Mesures magnétométriques ... 59
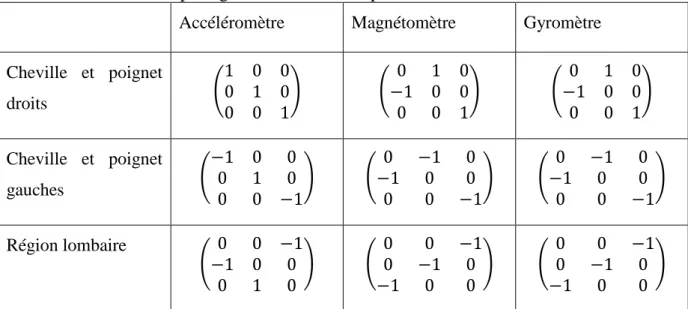
2.3.4 Repère et matrice de passage ... 60
2.4 Méthodes ... 64
2.4.1 Protocole ... 64
2.4.2 Traitement du signal ... 71
2.4.3 Calcul des paramètres ... 77
2.5 Conclusion ... 85
CHAPITRE 3 : VALIDITE DU BODYTRACK DANS LE CADRE DE L’EVALUATION DE L’ÉQUILIBRE POSTURAL LORS D’EXERCICES DE YOGA ... 86
3.1 Introduction ... 86 3.2 Méthodes ... 88 3.2.1 Sujets ... 88 3.2.2 Matériels ... 88 3.2.3 Instructions ... 88 3.2.4 Traitement du signal ... 89 3.2.5 Analyse statistique ... 96
3.3 Analyse des données pour l’exercice « montagne » ... 97
3.3.1 Résultats de répétabilité Intra-session ... 97
3.3.2 Résultats de capacité discriminative ... 99
3.3.3 Résultats pour la corrélation entre données accélérométriques et centre de pression ... 103
3.3.4 Discussion pour l’exercice montagne ... 107
3.3.5 Conclusion pour l’exercice montagne ... 109
x
3.4.1 Résultats de répétabilité intra-session ... 110
3.4.2 Résultats pour la corrélation entre données accélérométriques et centre de pression ... 112
3.4.3 Discussion pour l’exercice « Arbre » ... 117
3.4.4 Conclusion pour l’exercice « Arbre » ... 118
3.5 Conclusion ... 118
4.1 Introduction ... 120
4.2 Méthodologie ... 121
4.2.1 Paramètres stabilométriques ... 121
4.2.2 Normalisation des paramètres ... 121
4.2.3 Analyse en composante principale ... 122
4.2.4 Élaboration du score ... 123
4.3 Résultats de l’analyse en composantes principales ... 133
4.3.1 Analyse multi-régression et normalisation des paramètres ... 133
4.3.2 Analyse en composantes principales appliquée sur les paramètres 1D ... 137
4.3.3 Analyse en composantes principales appliquée sur les paramètres 2D ... 139
4.3.4 Analyse en composantes principales appliquée aux paramètres 3D ... 141
4.4 Discussion ... 142
4.5 Résultats relatifs au calcul du score ... 145
4.6 Conclusion ... 157
CONCLUSION GENERALE ET PERSPECTIVES ... 158
ANNEXES ... 181
ANNEXE A : STATISTIQUES DESCRIPTIVES DES PARAMÈTRES ... 181
ANNEXE B : TEST DE RÉPÉTABILITÉ DES DISPOSITIFS « BODYTRACK » ... 191
xi
ANNEXE D : TEST DE RÉPÉTABILITÉ DES PARAMÈTRES UTILISÉS DANS LE CALCUL DU SCORE ... 197
ANNEXE E : RÉSULTATS DES SCORES... 198
xii
LISTE DES TABLEAUX
Tableau 1 : Les valeurs des surfaces et des vitesses moyennes du CM et CP pour trois
conditions : debout pieds écartés, pieds serrés et debout sur un seul pied. ... 29
Tableau 2 : évaluation clinique du maintien d’équilibre. ... 38
Tableau 3 : synthèse des paramètres posturo graphiques ... 43
Tableau 4 : Amplitudes et fréquences exigées pour l’évaluation du mouvement humain à l’aide des accéléromètres ... 47
Tableau 5 : Utilisation des accéléromètres pour évaluer les oscillations posturales ... 50
Tableau 6 : Matrices de passage des référentiels capteurs au référentiel ISB. ... 63
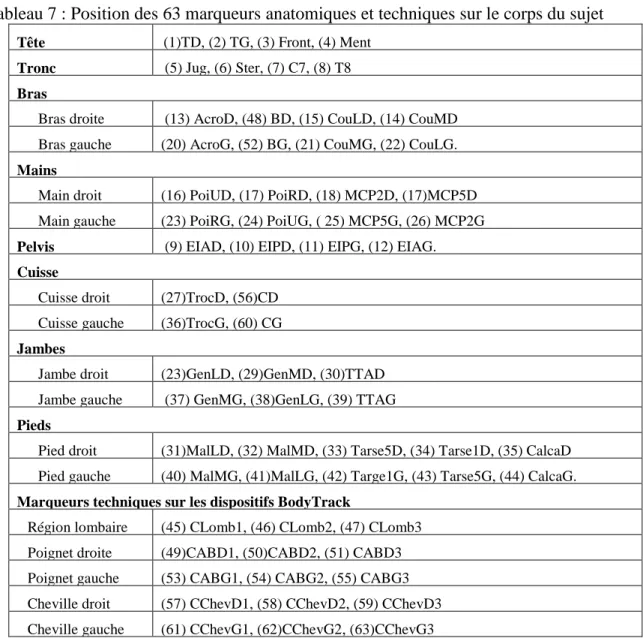
Tableau 7 : Position des 63 marqueurs anatomiques et techniques sur le corps du sujet ... 65
Tableau 8 : Séquence des exercices de Yoga pour chaque répétition. ... 71
Tableau 9 : Synthèse des paramètres posturographiques calculés. ... 90
Tableau 10 : Moyenne et écart type de la durée de chaque posture. ... 92
Tableau 11 : Comparaison entre les valeurs moyennes et l’écart type des paramètres rapportés par le travail de Martinez-Mendez (Martinez-Mendez et al., 2012) et ceux du travail présent ... 93
Tableau 12 : Comparaison entre les valeurs moyennes et l’écart type des paramètres fréquentiels rapportés par le travail de Martinez-Mendez (Martinez-Mendez et al., 2012) et ceux du travail présent. ... 94
Tableau 13 : Classement des valeurs d’ICC pour chaque phase stabilisée de l’exercice « Montagne » et chaque condition sensorielle lors des 3 répétitions (F50APML a été retiré du décompte car des valeurs et des variabilités extrêmement faibles ont été obtenues). . 99
Tableau 14 : Niveau de significativité p des tests de Student dans le cadre de la détection de différences entre la condition yeux ouverts et yeux fermés selon la phase du mouvement et le moyen de mesure pour l’ensemble des paramètres stabilométriques étudié (p<.05 en gras). ... 100
xiii
Tableau 15 : Coefficient de corrélation de Pearson et sa probabilité p entre les paramètres stabilométriques de l’accéléromètre et leur homologues obtenus par la plateforme de force (p<0,05 en gras). ... 104
Tableau 16 : Valeurs minimales et maximales associées au nombre de coefficients de corrélation de Pearson significatifs (p<0,05) entre accéléromètres et plateforme de force par phase du mouvement. ... 105
Tableau 17 : Valeurs maximales des coefficients de corrélation entre les paramètres liés au Jerk de ACC et ceux liés au CP (p<0,05 en gras) en combinant conditions sensorielles et phases du mouvement. ... 106
Tableau 18 : Valeurs minimales des coefficients de corrélation entre les paramètres liés au Jerk de ACC et ceux liés au CP (p<0,05 en gras) en combinant conditions sensorielles et phases du mouvement. ... 106
Tableau 19 : Classement des valeurs d’ICC pour chaque phase stabilisée de l’exercice « arbre » lors des 3 répétitions. ... 112
Tableau 20 : Coefficient de corrélation de Pearson et sa probabilité p entre les paramètres stabilométriques de l’accéléromètre et leur homologues obtenus par la plateforme de force (p<0,05 en gras). ... 114
Tableau 22: Valeurs minimales et maximales associées au nombre de coefficients de corrélation de Pearson significatifs (p<0,05) entre accéléromètres et plateforme de force par phase du mouvement. ... 115
Tableau 23 : Coefficient de corrélation de Pearson entre paramètres stabilométriques liés au jerk obtenus par l’accéléromètre et ceux obtenus à l’aide de la plateforme de force... 116
Tableau 23 : Synthèse des paramètres estimés pour l’analyse en composantes principales .. 121
Tableau 24 : Tableau des facteurs clés de calcule du Score. ... 123 Tableau 25 : Angles référentiels de chaque posture de l’exercice « montagne » ... 131
Tableau 26 : L’angle référentiel de chaque posture de l’exercice « Arbre » ... 132
Tableau 27 : Coefficient de corrélation multiple entre les paramètres 1D et les facteurs biomécaniques (Poids et taille) et l’âge. Seules les régressions r² supérieur à 0,2 sont présentées pour chaque posture de chaque exercice. ... 134
xiv
Tableau 28 : Coefficient de corrélation multiple entre les paramètres 2D et les facteurs biomécaniques (Poids et taille) et l’âge. Seules les régressions r² supérieur à 0,2 sont
présentées pour chaque posture de chaque exercice. ... 135
Tableau 29 : Coefficient de corrélation multiple entre les paramètres 3D et les facteurs biomécaniques (Poids et taille) et l’âge. Seules les régressions r² supérieur à 0,2 sont présentées pour chaque posture de chaque exercice. ... 136
Tableau 30 : les Paramètres estimés selon une dimension (AP, ML et V): les coefficients des CPs ainsi que les coefficients de corrélation entre ces derniers et les paramètres sont présentés entre parenthèses. (Seuls les paramètres fortement corrélés avec les composantes principales sont présentés). ... 138
Tableau 31 : les Paramètres estimés selon deux dimensions (AP-ML, ML-V et AP-V): les coefficients des CPs ainsi que les coefficients de corrélation entre ces derniers et les paramètres sont présentés entre parenthèses. (Seuls les paramètres fortement corrélée avec les composantes principales sont présentés). ... 140
Tableau 32 : Paramètres estimés dans les trois dimensions: les coefficients des CPs ainsi que les coefficients de corrélation entre ces derniers et les paramètres sont présentés entre parenthèses. ... 142
Tableau 33 : Paramètres sélectionnés à partir de l’analyse de composante principale ... 144
Tableau 34: Paramètres calculés pour chaque catégorie ... 146
Tableau 35 : le nombre de sujets par niveau du score selon chaque phase des deux exercices de yoga « Montagne » et « Arbre ». ... 150
Tableau 36 : Note moyenne par catégorie, par phases de chaque catégorie ... 151
Tableau 37 : Score moyen par phase et par posture. ... 151
Tableau 38 : La moyenne des notes et leur écart type par phase et par exercice ... 151
Tableau 39 : angles articulaires déterminés pour le torse et pour chaque membre, supérieur et inférieur. ... 152
xv
Tableau 41 : Valeurs moyennes et écart –types des paramètres estimés pour l’exercice « Montagne » pour chaque posture et chaque condition sensorielle (YO : yeux ouverts et YF : yeux fermés). ... 181
Tableau 42 : Valeurs moyennes et écart –types des paramètres estimés pour l’exercice « Arbre » pour chaque posture dans condition yeux ouverts. ... 186
Tableau 43 : Tableau de synthèse des ICC et SEM% par phase et outil de mesure des paramètres stabilométriques de l’exercice « Arbre » pour l’accéléromètre lombaire .... 191
Tableau 44 : Suite du tableau de synthèse des ICC et SEM% par phase et outil de mesure des paramètres stabilométriques de l’exercice « arbre » pour l’accéléromètre lombaire. .... 192
Tableau 45 : Tableau de synthèse des ICC et SEM% par phase, condition sensorielle et outil de mesure des paramètres stabilométriques de l’exercice « Montagne » pour l’accéléromètre lombaire. ... 193
Tableau 46 : Paramètres estimés selon deux dimensions (AP-ML, ML-V et AP-V) : les coefficients des CPs ainsi que les coefficients de corrélation entre ces derniers et les paramètres sont présentés entre parenthèses. ... 194
Tableau 47 : Paramètres estimés selon une dimension (AP, ML et V) : les coefficients des CPs ainsi que les coefficients de corrélation entre ces derniers et les paramètres sont présentés entre parenthèses. ... 195
Tableau 48 : Répétabilité des paramètres stabilométriques issus de l’ACP. ... 197
Tableau 49 : Résultats des notes attribuées pour chaque catégorie ainsi que la valeur du score total déterminés pour l’exercice « Arbre » pour chaque posture. ... 198
Tableau 50 : Résultats des notes attribuées pour chaque catégorie ainsi que la valeur du score total déterminés pour l’exercice « Montagne » pour chaque posture. ... 199
xvi
LISTE DES FIGURES
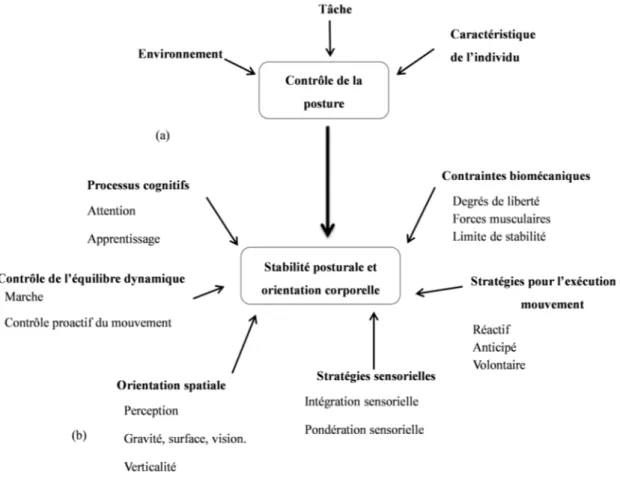
Figure 1: Illustration des interactions entre, (a) environnement, tâche et les caractéristiques de l’individu (Shumway-Cook and Woollacott, 2007) et (b) les facteurs cognitifs, sensoriels, moteurs et biomécaniques (Horak, 2006) intervenant dans le contrôle postural. ... 7
Figure 2 : Illustration des interactions entre, environnement, tâche et les facteurs cognitifs, sensoriels, moteurs et biomécaniques intervenant au contrôle postural (Shumway-Cook and Woollacott, 2007). ... 9
Figure 3: facteurs impliqués à la stabilité posturale et l'orientation corporelle (Horak, 2006) 11
Figure 4 : Limites de stabilité normale et anormale. (A) Personne âgée saint utilise la stratégie de cheville ses limites de stabilité sont représenté par un cône. (B) Personne âgée avec plusieurs déficits sensoriel utilise la stratégie de hanche. (C) Personne âgée avec plusieurs déficits sensoriel utilise la stratégie du pas pour augmenter la taille de son surface d’appui (Horak, 2006). ... 13
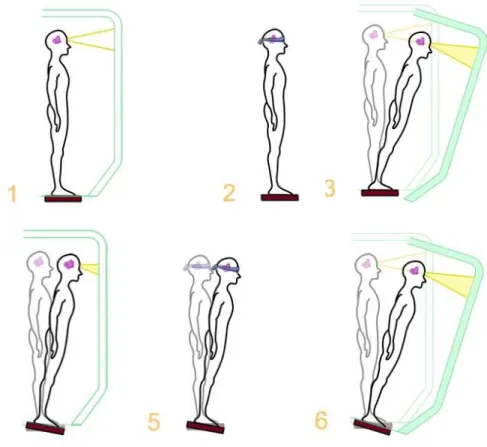
Figure 5 : (C1) yeux ouvert, décor immobile et plate-forme de force fixe; information visuel, information vestibulaire et information proprioceptives sont disponible et pertinents, (C2) yeux fermés, décor immobile et plate-forme de force fixe; seul l’information visuel n’est pas disponible, (C3) yeux ouvert, décor mobile et plate-forme de force fixe; l’information visuel n’est pas juste, (C4) yeux ouverts, décor immobile et plate-forme asservi : le sujet doit négliger les informations proprioceptive et cutanée; information proprioceptive trompeuse. (C5) yeux fermé et plate-forme asservi. (C6) yeux ouvert, panorama visuel et plate-forme asservis. ... 17
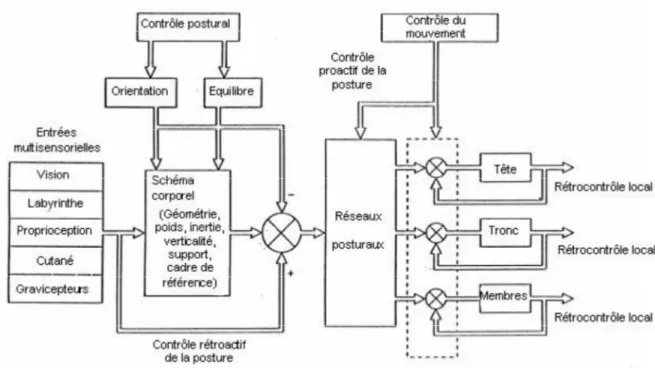
Figure 6 : organisation central du maintien d’équilibre avec les deux niveaux (Massion, 1998a). ... 20
Figure 7 : Statokinésigrammes montrant que malgré la différence entre deux individus, aucun d’eux ne chute (Lacour, 1997). ... 23
Figure 8 : Ensemble des positions et vitesses admissibles du CM lors du maintien de la posture debout. Figure modifiée de sa version originale (Pai and Patton, 1997). ... 26
xvii
Figure 9 : Exemple de déplacement du CP lors du maintien de la posture debout les yeux fermés et les pieds serrés. La première partie illustre les oscillations posturales d’un sujet
de 31 ans et la deuxième d’un sujet de 66 ans (Sullivan et al., 2009). ... 30
Figure 10 : Principe de fonctionnement des accéléromètres; (a) accéléromètre piézo-résistif, (b) accéléromètres capacitives et (c) accéléromètre piézo-électrique. ... 46
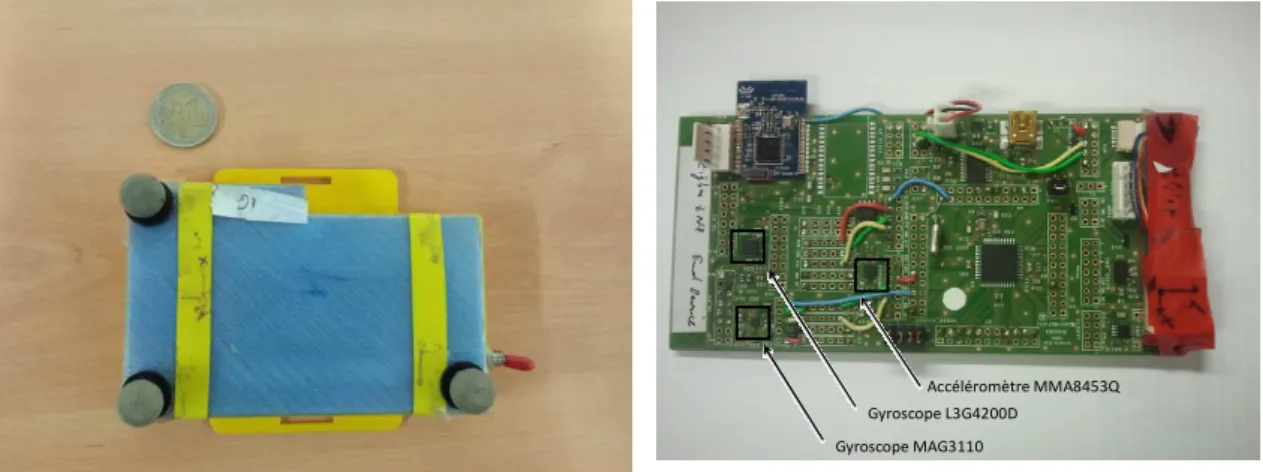
Figure 11 : Carte électronique du dispositif BodyTrack ... 55
Figure 12 : Positionnement des capteurs. ... 57
Figure 13 : Repère selon les recommandations ISB. ... 60
Figure 14 : Repère des données de la plateforme de force ... 61
Figure 15 : Repères des dispositifs BodyTrack. ... 63
Figure 16 : Modèle défini suite à l’emplacement de 16 marqueurs techniques et 47 marqueurs anatomiques positionnés sur le sujet ... 66
Figure 17 Posture « Tadasana » ... 66
Figure 18 : Posture ‘Vrksasana’ ... 67
Figure 19 : Enregistrement d’un exercice sur plateforme de force avec 5 centrales inertielles et un système optoélectronique (6 caméras infrarouges). ... 70
Figure 20 : Synchronisation des signaux, normalisés, issus des trois moyens de mesures (a) avant synchronisation et (b) après synchronisation. ... 72
Figure 21 (a) Illustration de la délimitation des phases statiques de l’exercice « Arbre » yeux ouverts. (b) Illustration de la délimitation des phases statiques de l’exercice « Montagne » yeux ouverts. Les traits représentent le début et la fin de chaque phase statique de l’exercice. ... 73
Figure 22 : Étapes de lissage du signal accélérométrique. (1) illustration des signaux bruts, (2) compensation de la composante de gravité et soustraction de la moyenne du signal, (3) application d’un filtre passe haut de fréquence de coupure 0,3Hz et (4) application du filtre Savitzky-Golay. Dans la première colonne le signal selon chaque axe (AP, Ml, V) est présenté en fonction du temps et dans la deuxième colonne, nous avons les densités de puissance spectrale en fonction de la fréquence. ... 76
xviii
Figure 23 : Organigramme descriptif de l’algorithme de traitement des données. ... 77
Figure 24 : Représentation des accélérations (en g) dans le plan AP (abscisses) – ML (ordonnées). Les points présentent la distance maximale à partir du centre pour chaque quadrant du plan. Et la ligne verte correspond à la distance maximale entre deux points du plan. ... 79
Figure 25 : Estimation de l’aire qui enveloppe la trajectoire des accélérations dans le plan AP-ML ... 80
Figure 26: Répartition des résultats des tests de Student significatifs selon la probabilité p, la phase du mouvement et le moyen de mesure exprimée en pourcentage du nombre total de paramètres stabilométriques. ... 102
Figure 28 : Représentation globale du score ... 124
Figure 29 : Représentation du signal accélérométrique d’une posture statique. *** représente la partie du signal retenue pour l’évaluation du maintien de l’équilibre postural. ... 125
Figure 30 : Représentation du score de maintien d’équilibre postural ... 126
Figure 31: Modèle obtenu à partir des données Qualisys. ... 127
Figure 32: Graphique illustrant le critère d’attribution des notes par degré de liberté du modèle ... 129
Figure 33: Diagramme polaire présentant les performances d’un sujet au cours d’une des phases de la posture « Montagne »... 129
Figure 34 : Modèle d’évaluation de la réalisation de l’exercice « Montagne »; illustration des trois postures. ... 130
Figure 35 : Modèle d’évaluation de réalisation de l’exercice « arbre »; illustration des trois postures ... 131
Figure 36 : Nombre minimal de composantes principales qui expliquent 90,98% de la variance totale des paramètres 1D. ... 137
Figure 37 : Nombre minimal de composantes principales qui expliquent 90,5% de la variance totale des paramètres 2D. ... 140
xix
Figure 38 : Nombre minimal de composantes principales qui présentent 92.86% de la variance totale des paramètres 3D. ... 141
Figure 39 : Représentation du score de la stabilité. La note attribuée pour chaque catégorie est représentée sur l’axe correspondant. La valeur du score total représente la surface formée par les vecteurs de chaque catégorie. ... 147
Figure 40 : Représentation graphique des trois phases de l’exercice « Montagne ». ... 148
Figure 41 : Représentation graphique des trois phases de l’exercice « Arbre » ... 149
Figure 42: Score obtenu dans chaque phase pour un sujet réalisant l’exercice « Montagne » ... 153
Figure 43 : Score obtenu dans chaque phase pour un sujet réalisant l’exercice « Arbre » .... 153
Figure 44 : Décours temporel des signaux des capteurs inertiels pour le calcul de l’attitude 156
Figure 45 : Attitude du BodyTrack mesurée par les capteurs BodyTrack et le système optoélectronique (Qualisys) ... 156
Figure 46 : Représentations graphiques de la moyenne des notes attribuées pour les trois phases de l’exercice « Montagne » (première colonne) et l’exercice « Arbre » (deuxième colonne); En rouge le score moyen de tous les sujets moins l’écart type, en bleu la présentation graphique des moyenne des notes attribuées et en vert celle de la moyenne plus l’écart type. ... 202
Figure 47 : Exemple de représentations graphiques des scores de la première phase de l’exercice « Montagne ». ... 204
Figure 48 : Exemple de représentations graphiques des scores de la deuxième phase de l’exercice « Montagne ». ... 205
Figure 49 : Exemple de représentations graphiques des scores de la troisième phase de l’exercice « Montagne ». ... 206 Figure 50 : Exemple de représentations graphiques des scores de la première phase de
l’exercice « Arbre ». ... 207
Figure 51 : Exemple de représentations graphiques des scores de la deuxième phase de l’exercice « Arbre ». ... 208
xx
Figure 52 : Exemple de représentations graphiques des scores de la troisième phase de l’exercice « Arbre ». ... 209
xxi
LISTE DES SIGLES ET ABRÉVIATIONS
CM Centre de Masse
CP Centre de pression
AP Antéro-Postérieur
ML Médiolatéral
V Vertical
ICC Corrélation Intra-Classe
SEM Erreur standard de mesure.
BESS Balance Error Scoring System
BESTEST Sensory Organization Test
SOT Balance Evaluation Systems Test
MT Longueur de l’intervalle de temps entre deux pics successifs
MoyP Valeur moyenne des pics dans la courbe des oscillations posturale.
VIS Variabilité intra-individu correspondante.
PAYO Posture Arbre Yeux Ouverts.
PAYF Posture Arbre Yeux Fermés.
PMYO Posture Montagne Yeux Ouverts.
1
INTRODUCTION
Dans les pays industrialisés, le mode de vie est devenu de plus en plus sédentaire et ne comporte qu’un très faible niveau d’activité physique. Dans les années 1960 aux État Unis, près de la moitié des emplois dans le secteur industriel demande des efforts modérés contre moins de 20% aujourd’hui (Church et al., 2011). L’accroissement de la sédentarité en plus de la dégradation de l’hygiène de vie liée à de mauvaises habitudes alimentaires et la consommation de tabac et d’alcool, tend à priver la majorité de la population d’un mode de vie sain et équilibré. Ces facteurs entrainent une augmentation de la fréquence des maladies chroniques, comme les maladies cardiovasculaires, l’obésité, le diabète ou encore chez les personnes âgées les risques de chutes qui conduisent à la fragilité et à la dépendance. De ce fait, la mise en place de politiques de prévention est un enjeu socio-économique fort car les pathologies induites sont des causes importantes de mortalité dans la plupart des régions du monde (Organisation Mondiale de la Santé, 2002).
Cette réalité qui interpelle les professionnels de santé et ceux du milieu sportif est à l’origine d’une prise de conscience. Elle les pousse à agir pour modifier les habitudes de vie et à proposer de nouvelles solutions technologiques afin d’améliorer le bien-être et la santé des individus par la promotion de l’exercice physique. Ces dernières concernent, non seulement la sensibilisation à la nécessité d’adopter une pratique physique régulière, mais aussi au développement de la motivation pour l’accomplissement personnel et l’amélioration de l’estime de soi ( DiLorenzo et al., 1999; De Moor et al., 2006). De plus, une bonne évaluation de la motricité qu’elle soit effectuée dans le cadre clinique ou par un utilisateur désireux de connaitre ses capacités physiques doit passer par un dispositif rapide et simple, et une autoévaluation sur le lieu de la pratique sportive ou à domicile. Ces nouveaux moyens sont encore à développer aussi bien du point de vue des appareillages que des applications informatiques qui les exploiteront. Dans cette optique, le projet BodyScoring, propose une solution innovante avec de nouveaux services associés. Elle regroupe d’une part, une technologie embarquée communicante de mesure de l’activité physique et, d’autre part, des applications web et mobile permettant d’offrir les services nécessaires à l’évaluation de la motricité et au suivi de l’activité physique. Le projet BodyScoring comporte deux parties. La première est technologique et correspond au développement d’un appareillage dénommé « BodyTrack » porté par l’individu qui regroupe un ensemble de capteurs physiologiques
2
/biomécaniques et un calculateur dont le rôle est de traiter les signaux des capteurs et de délivrer en sortie des informations interprétées relatives à l’analyse de l’exercice physique. La seconde partie aborde les fonctionnalités d’un ensemble d’outils exploitant les réseaux et les appareils mobiles (terminal, smartphone et/ou tablette tactile). Leur objectif est de fournir à l’utilisateur un bilan de ses aptitudes physiques, un programme d’activités individualisé, un accompagnement virtuel lors de la pratique de l’exercice physique et enfin, le support d’un réseau social afin de comparer sa progression avec d’autres utilisateurs.
Il existe dans la littérature un certain nombre d’outils de suivi/mesure de l’activité physique et de la dépense énergétique. Parmi eux, le cardio-fréquencemètre enregistre et traite le signal cardiaque, estime la dépense énergétique (Spurr et al., 1988) et l’état de stress via l’étude de sa variabilité (Vrijkotte et al., 2000). Les balances intelligentes (Clark et al., 2010) permettent l’entraînement et le suivi des performances posturales (Mhatre et al., 2013) alors que le podomètre basé sur un accéléromètre détermine le nombre de pas et le type de locomotion (marche et course sur terrain plat ou dévers) (Tudor-Locke et al., 2014). Plusieurs dispositifs ont d’abord été développés dans le domaine de la recherche afin d’évaluer des paramètres biomécaniques globaux de la posture et de la locomotion comme par exemple, le capteur Myotest (Bampouras et al., 2010) destiné à une évaluation de la fonction neuromusculaire et de l’activité globale, ou encore le Locometrix (Auvinet et al. 2002, Mignardot et al., 2014) qui utilise un accéléromètre 3D pour mesurer des paramètres globaux de la locomotion ( la vitesse de la marche, la cadence, la longueur de foulée). Par la suite, des solutions à base de centrales inertielles embarquées ont permis d’évaluer la cinématique articulaire (Xsens). Le coût et la complexité de ces solutions les cantonne encore au domaine de la recherche et/ou de l’industrie du spectacle (animation, cinéma, jeux videos …). Cependant, on peut assister actuellement à un essor de ces technologies vers le grand public dans une tendance appelée « quantified self » (Gosney et al., 2007). Celle-ci s’appuie d’une part, sur l’intégration de centrales inertielles dans les terminaux mobiles (smartphones et tablettes tactiles), dans des bracelets portés au poignet (Nike +, FitBit, Jawbone, Catapult) ou encore dans les vêtements eux-mêmes (Chelius et al., 2011). Cette dynamique conduit au développement d’un grand nombre d’applications intégrant différentes fonctionnalités (telles que l’évaluation de la distance parcourue et du nombre de pas, l’analyse de l’allure pendant la course, le contrôle la fréquence cardiaque...) inscrivant l’individu au centre des technologies de la communication.
3
L’ensemble des produits existants relève soit de solutions à caractère professionnels et donc d’un coût élevé, soit de solutions technologiques basiques pour le suivi de l’activité physique exploitant des données accélérométriques et cardiorespiratoires. Ces solutions ne permettent pas de tester les capacités physiques réelles d’un individu et ne fournissent pas de plan d'activité personnelle.
Afin de pallier ces manques, les objectifs du projet BodyScoring, grâce au couplage de capteurs cardiofréquencemètre, capteurs inertiels, magnétométriques, et GPS sont de contribuer à fournir un bilan complet en intégrant:
• des indicateurs physiologiques sur l’aptitude cardiorespiratoire et les capacités musculaires,
• des indicateurs biomécaniques pour évaluer la marche, la course et la qualité posturale de l’individu.
Ce bilan multifactoriel des capacités motrices de l’individu pourra alors être archivé afin de permettre à l’utilisateur de suivre sa progression lors d’un programme d’entraînement ou être diffusé à la communauté via un réseau social dans un objectif d’émulation.
Parmi les quatre indices relevant de l’évaluation des capacités motrices (aptitudes cardiorespiratoires, capacité musculaires, posturale et locomotion), l’évaluation et la notation de la qualité de la posture et de la stabilité posturale constitueront notre apport dans le cadre de ce projet. En effet, l’aptitude à maintenir la posture debout est un élément fondamental de la motricité humaine qui implique de nombreuses structures nerveuses, sensori-motrices et musculaires. Naturellement instable, la station debout ne peut pas être maintenue parfaitement immobile du fait de perturbations internes et externes, des délais de traitement et de conduction de l’influx nerveux relatifs aux informations sensorielles et aux commandes motrices. Les caractéristiques de ces oscillations intègrent des informations sur la motricité. Ainsi, différents outils ont été développés afin de les qualifier et quantifier aussi bien chez le sujet jeune, âgé, valide ou atteint d’une pathologie. On distingue deux grandes classes d’outils permettant l’évaluation de la posture : les tests qualitatifs (ou semi quantitatifs) et les tests quantitatifs. Les premiers visent à qualifier les capacités fonctionnelles d’un individu dans le cadre clinique et sont constitués de tests reposant essentiellement sur des tâches à réaliser (Panjan and Sarabon, 2010). Les variables prises en compte sont le succès ou l’échec et le
4
temps mis pour les accomplir. Les seconds, de type quantitatif, sont basés sur l’utilisation de capteurs enregistrant des signaux représentatifs des oscillations posturales. L’outil le plus utilisé est la plateforme de force qui enregistre les éléments de réduction du torseur des actions extérieures au sol et permet de déterminer l’évolution temporelle du déplacement du centre de pression (point au sol tel que le moment des actions extérieures est vertical) (Goldie et al., 1989). Différents paramètres sont déduits de cette trajectoire. Ils sont de type spatiotemporels (RMS, variabilité, amplitudes) (Hufschmidt et al., 1980), fréquentiels (Prieto et al., 1996) et structurels (Collins and De Luca, 1993; Collins and Luca, 1995). Les capteurs inertiels placés au niveau de la région lombaire ont démontré leur fiabilité comme outils d’évaluation de l’équilibre postural dans un environnement clinique ( Moe-Nilssen, 1998a ; Mancini et al., 2012). Ils permettent de déterminer l’accélération d’un point corporel mais aussi la vitesse angulaire du repère lié au capteur à l’aide un gyromètre. Du fait de leur coût et de la complexité de leur mise en œuvre, jusqu’à récemment, ces techniques étaient destinées au milieu clinique et à la recherche. Le développement de la technologie des systèmes micro-électromécanique (MEMS), permet dorénavant de disposer de dispositifs légers, portables et surtout à faible coût qui permettent maintenant une évaluation des oscillations posturales. Il est bien établi qu’un entraînement spécifique peut améliorer les performances posturales objectivées par des paramètres biomécaniques ( Jacobson et al., 1997; Gauchard et al., 1999; Kidgell et al., 2007) en particulier la pratique du Yoga (Schmid et al., 2010) et du Pilate (English and Howe, 2007; Pata et al., 2013.). Ainsi, il semble pertinent de coupler ce type d’exercice avec l’utilisation de capteurs inertiels afin d’évaluer les oscillations posturales dans un cadre stimulant.
Dans ce contexte, notre travail de thèse consiste à proposer une procédure constituée d’un protocole d’évaluation basé sur des postures et exercices de Yoga et de la quantification d’un ensemble le plus exhaustif possible de paramètres biomécaniques qualifiant le maintien postural par mesures accélérométriques. Dans le cadre de nos travaux, nous proposons ainsi d’évaluer les oscillations lors d’exercices associant le maintien « stable » de postures à des transitions impliquant des mouvements. Ainsi, nous pourrons évaluer l’incidence sur les paramètres posturaux d’un enchainement posture / mouvements. Il s’agit donc, de répondre à deux objectifs:
5
• Identifier les paramètres biomécaniques pertinents et leur combinaison afin de caractériser la régularité, la complexité et la stabilité de la posture et qualifier la bonne exécution des exercices proposés,
• Etablir un score qui permettra de construire une vue d’ensemble quantitatif de la posture.
Pour atteindre ces objectifs, le manuscrit sera organisé de la manière suivante. Le
premier chapitre dresse un état de l’art dans le domaine de l’évaluation de l’équilibre
postural. Dans une première partie, une synthèse des processus neurophysiologiques mis en jeu dans le cadre du maintien postural et notamment les capteurs physiologiques utilisés seront abordés. Ensuite, les concepts mécaniques d’équilibre et de stabilité seront décrits dans le cadre général puis, dans le contexte du maintien postural. Dans la troisième partie de ce chapitre, nous présentons les différentes méthodes et techniques utilisées pour l’évaluation et l’analyse de l’équilibre postural ainsi que les études traitant de l’utilisation des capteurs inertiels. A l’issue de cette synthèse nous justifions donc les hypothèses et modalités adoptées dans la suite du travail. Le second chapitre expose la méthodologie et le protocole proposé afin d’évaluer les oscillations posturales et le calcul de score proposé. Ainsi, les mesures délivrées par les capteurs utilisés dénommés BodyTrack sont caractérisées et validées dans le cadre de l’évaluation des oscillations posturales en comparant ces résultats avec ceux obtenus à l’aide d’une plateforme de force et un système optoélectronique. Ces résultats seront présentés dans le chapitre 3. Cette étude comprendra une première partie où nous étudions la validité des capteurs Bodytrack par corrélation entre mesures accélérométriques et plateforme de force. Celle-ci est suivie par une étude de répétabilité à court terme des paramètres à partir d’une succession de trois mesures. Une fois les paramètres biomécaniques quantifiés, le
quatrième chapitre se propose, en premier lieu, de déterminer le jeu minimal de paramètres
accélérométriques qui permet de résumer de manière optimale l’ensemble des variables évaluées. Afin d’atteindre cet objectif nous traiterons les données à l’aide d’une analyse en composantes principales afin de déterminer les paramètres pertinents. En second lieu, nous associerons aux mesures d’équilibre postural l’évaluation de la bonne exécution des exercices de Yoga par les capteurs inertiels. Ces mesures seront préalablement validées par une comparaison avec celles délivrées par le système optoélectronique. Enfin, nous clôturons ce mémoire par une conclusion générale et des perspectives.
CHAPITRE 1
EVALUATION DE L’ÉQUILIBRE POSTURAL
L’objectif de ce chapitre est de synthétiser les travaux de la littérature relatifs à l’étude du maintien de l’équilibre postural afin de dégager la problématique considérée dans le cadre de ce travail de recherche. Ce chapitre sera entamé par une analyse bibliographique sur les concepts impliqués dans le cadre de l’étude de l’équilibre postural. Il traitera plus particulièrement de l’approche biomécanicienne qui vise à évaluer un ensemble de paramètres pertinents. La première partie introduit les définitions nécessaires à la bonne compréhension et les théories biomécaniciennes pour les évaluer et les analyser. L’évaluation est effectuée par l’intermédiaire des paramètres stabilométriques qui sont de type temporels, fréquentiels et structurels. Ceux-ci caractérisent la variabilité, la stabilité et la complexité des oscillations posturales. Plus particulièrement, nous présenterons les travaux relatifs aux liens existants entre la pratique du Yoga et du Pilate et l’amélioration de la qualité de l’équilibre postural. En nous appuyant sur la synthèse des travaux de la littérature, nous clôturons ce chapitre par la présentation de la démarche méthodologique adoptée dans le cadre du présent travail. Celle-ci consiste à évaluer les paramètres des oscillations posturales par capteurs embarqués dans le cadre d’exercices de Yoga en associant phases quasi-statiques et mouvements.1.1
Notions et concepts de contrôle postural
L’exécution de toute activité motrice lors de tâches de la vie quotidienne ou lors d’une activité physique nécessite d’acquérir et de maintenir une posture stable (Massion, 1998). Le terme de posture se définit comme la position relative des segments corporels les uns par rapport aux autres et par rapport à un repère inertiel extérieur au corps (J. Paillard, 1976). L’homme est capable d’adopter une infinité de postures, cependant, les termes «posture» ou «postural», font classiquement référence à la position bipédique, dénommée «posture érigée fondamentale» (J. Paillard, 1971). Le contrôle de la posture constitue l’un des aspects fondamentaux de l’activité motrice, car il assure (1) les fonctions de stabilisation et (2) d’orientation des segments corporels indispensable afin d’effectuer une action (Massion, 1997). La fonction de stabilisation vise à s’opposer à la force gravitationnelle et aux forces de réaction au sol pour maintenir la superposition des segments corporels du fait de la raideur articulaire et du tonus musculaire. Elle vise également à réguler la position du corps par rapport à la surface d’appui en assurant son équilibre et en faisant face aux contraintes extérieures. La fonction d’orientation quant à elle consiste à ajuster la position géométrique des segments corporels par rapport au monde extérieur pour la perception et l’organisation de
7
l’action (Paillard, 1976). Dans le cadre de ce travail, nous nous focaliserons plus spécifiquement sur le premier aspect relatif à la fonction de stabilisation. Le maintien de la posture debout est un phénomène complexe. Il l’est au point que le système postural humain n’est pas totalement fonctionnel à la naissance et qu’il nécessite une maturation et un apprentissage (Assaiante, 1998; Grasso et al., 1998). A l’âge adulte, une part prépondérante de la masse du corps est située à plus d’un mètre du sol et de ce fait, la station debout bipédique et à fortiori unipodale est naturellement instable. Les mécanismes mis en jeu afin de maintenir la posture debout sont complexes et dépendent de nombreux facteurs, résumés dans la (Figure 1.a), tels que les caractéristiques de l’individu, la tâche à accomplir et l’environnement (Shumway-Cook and Woollacott, 2007). Ils dépendent, aussi, de l’interaction de différents facteurs (Figure 1:b) cognitifs, sensoriels, moteurs et biomécaniques (Horak, 2006).
Figure 1: Illustration des interactions entre, (a) environnement, tâche et les caractéristiques de l’individu (Shumway-Cook and Woollacott, 2007) et (b) les facteurs cognitifs, sensoriels, moteurs et biomécaniques (Horak, 2006) intervenant dans le contrôle postural.
Le maintien postural est un aspect fondamental de la motricité et donc sa quantification est naturellement pertinente afin de construire une vue d’ensemble des capacités d’un individu
8
dans le cadre du projet Bodyscoring. Ainsi, l’objectif des paragraphes suivants est de présenter le fonctionnement du système du contrôle postural ainsi que les concepts biomécaniques liés à la notion d’équilibre postural et de stabilité afin de pouvoir considérer de manière adéquate leur évaluation. Dans l’optique de sélectionner les paramètres appropriés permettant une caractérisation valide de l’aspect de la motricité qui est évalué, les travaux traitant de la sensibilité des paramètres biomécaniques en fonction de l’âge, du sexe, de la pratique sportive et de la pathologie seront détaillés. De plus, dans ce travail, nous évaluerons la capacité de maintien de l’équilibre postural lors de l’exécution d’exercices de Yoga. Ainsi, le choix des exercices retenus sera justifié en présentant leur apport dans le cadre de l’amélioration de la motricité et leur capacité à fournir des situations d’évaluation suffisamment contraignantes en incluant des postures bipodales et unipodales.
1.1.1
Le système postural
Le corps humain est un système complexe. La motricité humaine est issue de la coordination du système musculo-squelettique sous le contrôle du système nerveux central et périphérique avec son réseau dense de capteurs physiologiques. La complexité réside dans la bonne coordination de l’ensemble du système neuro-sensori-moteur pour se mouvoir tout en gardant l’équilibre. Ceci fait de ces deux activités, la posture et la locomotion, les deux activités motrices fondamentales. La réalisation d’un mouvement engendre une perturbation de la posture, ce qui nécessite un ajustement pour compenser cette perturbation et maintenir l’équilibre (Bouisset and Zattara, 1981).
De manière schématique, le contrôle postural se traduit par l'immobilisation des pièces du squelette dans des positions déterminées, pour composer une attitude d'ensemble (Paillard, 1976). Une attitude relative à la caractéristique de l’individu, la tâche à accomplir et l’environnement, et dépendante de l’interaction de différents facteurs cognitifs, sensoriels, moteurs et biomécaniques.
9
Tâche
Processus cognitif Stratégie motrice Contraintes biomécaniques Entrées sensorielles (vestibulaire, visuel et proprioceptive)Perturbation
(environnement)
Figure 2 : Illustration des interactions entre, environnement, tâche et les facteurs cognitifs, sensoriels, moteurs et biomécaniques intervenant au contrôle postural (Shumway-Cook and Woollacott, 2007).
D’après la figure précédente, on peut déduire que le contrôle postural s’effectue grâce au cervelet. Il reçoit des informations nerveuses sur la tâche, l’orientation du corps et le tonus des muscles et commande des nouvelles consignes pour réguler l’équilibre. Cette régularisation se fait d’une manière inconsciente, donc le système du contrôle postural est un système automatique, auto-asservi, multiplexé (a plusieurs entrées) et multimodal (a plusieurs sorties), qui a deux fonctions principales, l’orientation et la stabilisation (Horak and Macpherson, 2010), dont la finalité est de préserver l’équilibre et réguler la posture.
L’orientation posturale est le contrôle actif de l’alignement de la tête, la colonne vertébrale et les jambes avec le vecteur de gravité, les surfaces de support, et les références visuelles. La réalisation de cette fonction fait appel à trois référentiels : Le premier est le référentiel géo-centré ou gravitaire qui détermine la position du corps par rapport à la verticale terrestre renseignée par le système vestibulaire qui constitue un capteur inertiel détectant l’accélération angulaire grâce aux canaux semi-circulaires, et l’accélération linéaire grâce aux otolithes. L’efficacité de ce système diminue en cas d’inclinaison corporelle, ce qui fait que l’intégration des informations sensorielles visuelles et somatosensorielles est nécessaire pour la correction des erreurs de codage de la gravité (Barra et Perennou, 2013). Le deuxième est
10
le référentiel égocentré. Il est basé sur des informations, issues du système sométhésique, jouant un rôle important dans la perception de la verticalité (Anastasopoulos et al., 1999). Enfin, le référentiel exo-centré ou « allocentré » relatif aux informations visuelles, statiques et dynamiques, importantes pour la détermination de l’orientation du corps par rapport à la gravité (Deliagina, 1997). La stabilisation correspond à la coordination des stratégies d’équilibration afin d’assurer l’équilibre du corps face aux contraintes extérieures et son maintien pendant la réalisation du mouvement (Massion et al., 1998).
Pour mieux comprendre ces fonctions du système du contrôle postural, il faut étudier les différents systèmes qui affectent la capacité de l’individu à se maintenir debout, à marcher ou encore à interagir avec l’environnement qui l’entoure. L’étude et la compréhension du fonctionnement de ces systèmes et leur contribution à la stabilité posturale et l’orientation nous permet de prédire et d’analyser les troubles de l’équilibre postural affectant chaque individu. Par exemple, une personne qui a des troubles vestibulaires a plus de risque de chute sur une surface instable et dans l’obscurité (Yardley et al., 2001), alors qu’une personne qui souffre de problème de force musculaire au niveau de la cheville est moins stable qu’un individu sain (Lord et al., 1991). Aussi, la personne qui adopte la stratégie posturale du pas sera instable en position debout les pieds côte à côte (Runge et al., 1999). Horak a cité six facteurs impliqués dans le contrôle postural qui sont présentés dans la Figure 2. Un trouble d’un ou plusieurs facteurs entraine une instabilité posturale et peut favoriser la chute chez les personnes âgées (Horak, 2006).
11
Figure 3: facteurs impliqués à la stabilité posturale et l'orientation corporelle (Horak, 2006)
Dans la suite nous décrivons ces facteurs et leur rôle dans le contrôle postural.
1.1.1.1 Contraintes Biomécaniques
Paillard a défini la posture comme : « l’agencement à un moment précis des différents segments corporels, dans l’espace, les uns par rapport aux autres, formant une position d’ensemble stable (Paillard, 1971)». Elle fait le lien entre la morphologie et l’activité motrice et constitue l’aspect fondamental de l’activité motrice, en assurant les appuis (fonction antigravitation), l’orientation et la coordination des gestes. Le squelette et le système musculaire forment l’appareil locomoteur humain; le premier est composé d’un ensemble d’os articulés entre eux grâce aux ligaments alors que le deuxième contient des muscles et leurs annexes. Le mouvement est généré grâce aux chaines musculaires (extenseur, fléchisseurs, abducteurs et adducteurs) qui agissent sur les os et permettent au squelette de s’opposer à la force de gravité et d’exécuter le mouvement. On appelle tonus musculaire la capacité des muscles à maintenir un état de tension permanent et à faible intensité. La composante de base du tonus musculaire, responsable du maintien et le rétablissement des attitudes contre l’action de pesanteur est appelé tonus postural (Massion, 1992). Grâce à l’appareil locomoteur,
12
l’homme est capable d’adopter une infinité de postures, cependant, les termes « posture » ou « postural », font référence à la position bipédique, appeler par paillard par « posture érigée fondamentale » (Paillard, 1971). En effet, maintenir une position debout l’être humain consiste à réguler une succession de déséquilibres résultant de l’action des forces musculaires et articulaires et les forces externes telles que la force de pesanteur, la force de réaction de la surface d’appui. Ceci fait que le corps humain n’est jamais stable, il est l’objet d’oscillations posturales permanentes. Dans le cadre biomécanique, le corps humain est parfois modélisé comme un pendule inverse et par suite le mouvement du corps humain est décrit comme des oscillations autour de la cheville (Loram and Lakie, 2002).
Les deux fonctions de l’activité posturale sont d’une part le maintien de la posture avec les positionnements : antigravitationnels (prise d’appui et résistances aux forces extérieures), directionnels (orientation spatiale du corps et des segments à mobiliser) et segmentaires (stabilisation de certaines articulations) (Paillard, 1976). D’autre part elle consiste à maintenir l’équilibre en réaction à des perturbations d’origine externe comme par exemple un impact ou une modification des caractéristiques de la surface d’appui ou interne liée au bruit dans le système sensorimoteur pouvant nécessiter l’élargissement de la surface d’appui et l’abaissement de la hauteur du centre de gravité, l’égalisation de la pression sur les surfaces d’appui. De ce fait, il s’avère que l’activité posturale peut être soit anticipative pour anticiper l’effet d’une perturbation, soit rétroactive pour récupérer l’équilibre lors du mouvement après la perturbation.
D’un point de vue mécanique, un système rigide est dit en équilibre lorsqu’il subit un mouvement uniforme. D’après les lois de la mécanique, il existe deux conditions qui doivent être remplies pour qu’un corps soit considéré en équilibre. La première est que la résultante des forces extérieures appliquées soit nulle. La seconde est remplie quand la somme des moments des forces extérieurs en un point s’exerçant sur le corps est nulle. Dans le cas du corps humain en pratique cette condition n’est jamais satisfaite car même en position érigée au repos, le corps subit des oscillations de faibles amplitudes. La notion d’équilibre, en biomécanique, peut être assimilée à un cône (Horak and Macpherson, 2010) ayant comme foyer le centre de pression (COP) qui représente le point du vecteur de force de réaction verticale du sol. La stabilisation est réalisée, de façon que la projection de centre de pression reste à l’intérieur de ce cône et la projection orthogonale du centre de masse reste à l’intérieur de la surface d’appui. Ce qui fait de la qualité et la taille de polygone de sustentation définies par la surface d’appui délimitée par nos pieds, un facteur affectant le maintien de l’équilibre
13
postural. Une augmentation de ce polygone engendre une variation de la forme du cône de stabilité qui varie aussi selon la mobilité articulaire, la force musculaire et les informations sensorielles. Une représentation de ce cône représente une référence au maintien de l’équilibre au sein de système nerveux central (Martin and Kessler, 2013).
1.1.1.2 Les stratégies posturales
Pour maintenir l’équilibre postural, l’homme met en place des mouvements segmentaires appelés stratégies posturales. Trois types de stratégies sont utilisées (figure 3); deux stratégies dites de « cheville » et de « hanche » ou la position des pieds et ne change pas et la troisième la stratégie de pas ou la taille de la surface d’appui augmente (Horak, 2006; Winter et al., 1996).
- La stratégie de cheville : Comme un pendule inverse, seule l’articulation de la cheville entre en jeu pour maintenir l’équilibre de la posture bipodale en cas de perturbation lente et modérée sur une surface solide.
- Stratégie de hanche : elle correspond à une inclinaison de buste c’est-à-dire soit une dorsiflexion de la cheville associé à une extension de hanche, soit une extension des pieds associée à une flexion de hanche. Elle est utilisée dans les cas où la personne se tient sur une surface étroite et a besoin de faire face à une perturbation importante et rapide ce qui nécessite un déplacement rapide du centre de masse corporel.
- Stratégie du pas : pour faire face à une perturbation importante, un pas permet de récupérer l’équilibre et évite une chute
Figure 4 : Limites de stabilité (A) Personne âgée saine utilise la stratégie de cheville ses limites de stabilité sont représentées par un cône. (B) Personne âgée avec plusieurs déficits sensoriels utilise la stratégie de hanche. (C) Personne âgée avec plusieurs déficits sensoriels
14
La stratégie du pas est plus utilisée chez les personnes âgées et elle peut être accompagnée de la stratégie de hanche par peur de la chute (Adkin et al., 2000; Horak, 2006). La sélection de la stratégie, sa planification et sa programmation sont faites par un programme central et spécifique aux contraintes environnementales (Horak and Nashner, 1986), aux contraintes intrinsèques (propriétés de l’individu) (Horak et al., 1990) et dépendent du but de la tâche (Oullier et al., 2002) ainsi que de l’expérience de l’individu (Zanone and Kelso, 1992).
Dans la partie suivante, nous présentons le système qui fournit les informations nécessaires sur l’environnement extérieur.
1.1.1.3 Inter-modalité sensorielle
Chaque individu, pour interagir avec son environnement extérieur, fait appel à une multi-modalité sensorielle qui lui transmet des informations sur les caractéristiques des stimuli provenant de l’environnement et de son corps. Dans un environnement éclairé avec une base de support solide, les afférences sensorielles pour une personne saine sont à 70% d’origine somatosensorielle, 10 % d’origine visuelle et 20% d’origine du système vestibulaire (Peterka, 2002). Nous présentons, dans la suite, les origines des informations sensorielles ainsi que leur traitement et intégration.
1.1.1.4 Les afférences sensorielles
Système vestibulaire
Le système vestibulaire est situé dans l’oreille interne. Il comporte deux récepteurs complexes :
- le système canalaire qui comporte 3 canaux semi-circulaires sensibles à l’accélération angulaire de la tête et permet de déterminer sa position dans l’espace.
- le système otolithique dont les récepteurs sont sensibles à l’accélération linéaire et angulaire à laquelle le corps est soumis.
La contribution des informations du vestibule sur le contrôle postural est mise en évidence en comparant la stabilité posturale des sujets sains à celle de sujets atteints de pathologies (Horak et al., 1990) ou encore en étudiant l’effet d’une stimulation vestibulaire galvanique (Dakin et al., 2010).
15
Des études ont montré que la privation de la vision implique l’augmentation de l’amplitude des oscillations du corps dans la position debout (Manchester et al., 1989; Redfern et al., 2001a). Complémentairement aux autres afférences sensorielles, les informations visuelles améliorent le contrôle postural. L’influence de l’information visuelle dépend de l’individu et de l’environnement. Par exemple, plusieurs études ont été menées sur l’effet de la distance œil-cible sur la stabilité posturale (Fitzpatrick and McCloskey, 1994; Lê and Kapoula, 2006), l’effet du champ visuel et la netteté de la vision des sujets (Hytönen et al., 1993; Lord et al., 1991; Tomomitsu et al., 2013; Era and Heikkinen, 1985). Pour comparer la stabilité et les capacités de maintien d’équilibre de plusieurs sujets il faut donc tenir compte de l’influence de certains paramètres liés aux conditions visuelles sur les oscillations.
Système Proprioceptif
Il est composé principalement de trois récepteurs; Les organes tendineux de golgi, qui situés dans les tendons des muscles squelettiques jouent le rôle d’un récepteur de force. Les fuseaux neuromusculaires, disposés parallèlement aux fibres du muscle sont sensibles à l’allongement de ces derniers. Ils donnent des informations sur la position statique des segments les uns par rapport aux autres ainsi que leur vitesse et leur direction de déplacement lors du mouvement. Enfin les mécanorécepteurs, situés dans les ligaments et les capsules articulaires, fournissent des informations sur les angles articulaires. Cet ensemble de récepteurs permet la perception de son propre corps, en déterminant la position du corps par rapport à la gravité ainsi que la position des différents segments corporels ainsi que le tonus musculaire.
Afin de montrer et de mieux comprendre la contribution de la proprioception dans le contrôle postural, deux approches sont utilisées; étudier les performances des personne pathologiques et les comparer avec celles des sujets sains (Bonfim et al., 2009; Lee et al.), ou manipuler les informations proprioceptives en ajoutant des vibrations musculaires mécaniques (Han et al., 2013; Vaugoyeau et al., 2008). Ces études ont montré que tout dysfonctionnement ou mauvaise rétroaction de ces récepteurs déstabilise l’équilibre postural.
Récepteur sensoriel de la peau
La sensibilité tactile, superficielle et profonde, fournit des informations sur la position (Moberg, 1983), le mouvement (Edin, 2001) ainsi que sur les forces exercées sur le corps (Johnson, 2001). Les mécanorécepteurs impliqués sont les corpuscules de Pacini, de Meissner et de Ruffini. Comme les pieds constituent le point de contact entre le corps et la surface d’appui, et du fait qu’un changement de la posture est souvent lié à un changement de la