HAL Id: tel-02190988
https://hal.archives-ouvertes.fr/tel-02190988
Submitted on 23 Jul 2019HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Commande sous contraintes de communication et
estimation non-linéaire et ses applications
Romain Postoyan
To cite this version:
Romain Postoyan. Commande sous contraintes de communication et estimation non-linéaire et ses applications. Automatique / Robotique. Université de Lorraine (Nancy), 2019. �tel-02190988�
Commission de mention Automatique, Traitement du Signal et des Images, Génie Informatique
Université de Lorraine
Commande sous contraintes de
communication et estimation non-linéaire et
ses applications
Mémoire de recherche
présenté et soutenu publiquement le 23 mai 2019 pour l’obtention de
l’Habilitation à Diriger les Recherches
de l’Université de Lorraine
Spécialité Automatique par
Romain POSTOYAN
Composition du jury
Présidente Sophie TARBOURIECH Directrice de recherche CNRS, LAAS, Toulouse
Rapporteurs Maria DI BENEDETTO Professeur, Université de l’Aquila, Italie
Daniel LIBERZON Professeur, University of Illinois
Christophe PRIEUR Directeur de recherche CNRS, GIPSA-lab, Grenoble
Examinateurs Jamal DAAFOUZ Professeur, Université de Lorraine
Maurice HEEMELS Professeur, TU Eindhoven, Pays-Bas
Dragan NESIC Professeur, University of Melbourne, Australie
Centre de Recherche en Automatique de Nancy UMR 7039 CNRS - Université de Lorraine 2, avenue de la forêt de Haye - 54516 Vandœuvre-lès-Nancy Tél. +33 (0)3.83.59.59.59 - Fax +33 (0)3.83.59.56.44
Dominique Ané, Regarder l’océan, Stock - La Forêt, 2015
Préambule
Ce mémoire résume l’essentiel de mes activités de recherche de février 2010 à juillet 2018. Ces travaux furent effectués au sein de l’Université de Melbourne en tant que post-doctorant de février à septembre 2010, puis au Centre de Recherche en Automatique de Nancy (UMR CNRS 7039, Université de Lorraine) en tant que chargé de recherche classe normale CNRS de janvier 2011 à ce jour.
J’ai pris le parti de mettre en avant l’aspect « vision » et perspectives de mes travaux. Ce tapuscrit est ainsi volontairement non-technique. Les énoncés mathématiques précis des résultats et leur analyse sont disponibles dans les publications indiquées, publications qui sont très largement disponibles sur internet via les sites HAL et ArXiv.
Bonne lecture,
Romain Postoyan, juillet 2018
Résumé
Mon activité de recherche porte sur l’automatique et s’organise principalement autour de deux axes.
Commande sous contraintes de communication. Il est désormais fréquent d’utiliser un ré-seau de communication numérique pour assurer l’échange de données entre le système à piloter et le contrôleur. Cela permet de diminuer le coût de l’installation, de faciliter la main-tenance, de réduire le volume et le poids des installations comparé aux implantations par câblage point-à-point. Par ailleurs, des problématiques telles que la commande de drones ou de plateaux de véhicules automobiles ne peuvent être envisagées qu’à l’aide de tels canaux numériques (sans fil). En contrepartie, les réseaux sont source d’imperfections (transmissions apériodiques, ordonnancement des données, quantification, retards, pertes de paquets) qui peuvent avoir un impact important sur le comportement du système bouclé. Il est alors es-sentiel d’avoir à disposition des lois de commande dont la synthèse et l’analyse prennent en compte ces phénomènes. Dans ce contexte, mon activité de recherche consiste à proposer et analyser des méthodes de commande principalement pour des systèmes non-linéaires de dimension finie connectés au contrôleur via un canal numérique. Je m’intéresse aux phéno-mènes d’échantillonnage variant dans le temps ainsi qu’à l’ordonnancement des nœuds. Je me suis particulièrement penché au cours de ces dernières années sur le cas où l’échantillonnage des données dépend de l’état du système et non d’une horloge. L’idée est d’adapter les com-munications aux besoins du système afin de ne pas surcharger le réseau. Une caractéristique de mes travaux est d’approcher le problème sous l’angle des systèmes hybrides. Il s’agit de systèmes dynamiques ayant à la fois des dynamiques continues, pour modéliser le processus à piloter, et discrètes, afin de décrire les transmissions au sein du réseau.
Estimation non-linéaire et applications. Alors que des solutions efficaces existent depuis les années 1960 pour l’estimation d’état des systèmes linéaires de dimension finie, le cas des systèmes non-linéaires n’est toujours pas tranché. Des solutions génériques existent pour les systèmes dits uniformément observables, mais celles-ci ne sont pas toujours simples à mettre en œuvre et souffrent de défauts majeurs en terme de robustesse quand vient le temps de l’implantation pratique. Mon activité de recherche consiste à proposer des méthodes d’esti-mation d’état, mais aussi de paramètres, pour des systèmes non-linéaires de dimension finie, pour lesquelles la convergence est garantie analytiquement. Ces travaux sont principalement
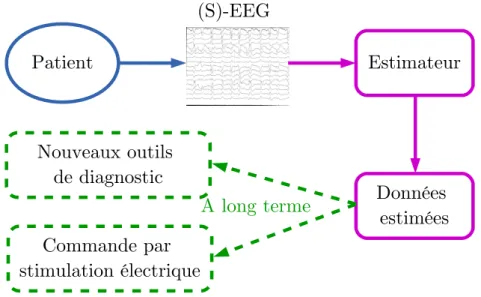
motivés et guidés par deux applications : les neurosciences, l’épilepsie en particulier, et les batteries électrochimiques. Dans le premier cas, il s’agit d’estimer les états ou les paramètres de modèles de population de neurones à partir de signaux d’électro-encéphalogrammes. Cette problématique prend tout son sens en épilepsie : en ayant accès à de telles données, nous aurons une meilleure connaissance des mécanismes de crises ce qui pourrait permettre à terme de les détecter voire de les prédire. Pour ce qui est des batteries, la question est d’estimer les concentrations de lithium au sein des électrodes à l’aide de mesures de tension, de courant et de température. Le but est d’avoir une meilleure connaissance de son état en temps réel et d’ainsi améliorer les algorithmes de gestion existants.
Remerciements
Je tiens tout d’abord à remercier Maria di Benedetto, Daniel Liberzon, Sophie Tarbouriech et Christophe Prieur d’avoir accepté d’être membre du jury de ce mémoire. C’est un honneur. Deux personnes ont eu une influence capitale sur mon travail et sur moi-même : Jamal Daafouz et Dragan Nešić. Je souhaiterais ici leur exprimer toute ma gratitude, je leur dois tellement.
Je tiens également à remercier les étudiants et post-doctorants avec qui j’ai eu la chance de travailler et à qui ce mémoire doit tant : Mahmoud Abdelrahim, Michelle Chong, Pierre Blondel, Mathieu Granzotto, Daniele Astolfi, Ying Tang, Benjamin Biemond, Wei Wang, Mo-hammed Hacene Hamid, Marcos César Bragagnolo, Jomphop Veetaseveera, Niek Borgers, Stefan Heijmans, André Marcorin de Oliveira, Alejandro Maass Martinez et Victor Dolk.
C’est un plaisir de travailler au CRAN avec des personnes telles que Constantin Mora-rescu, Vineeth Varma, Marc Jungers, Jérôme Lohéac, Samuel Martin (bon vent à lui), Pierre Riedinger, Gilles Millérioux, Benoît Marx, Valérie Louis-Dorr, Steven Le Cam, Radu Ranta, Carole Courrier, Christine Pierson, Didier Maquin etc. Une pensée également pour Samson Lasaulce pour nos joies en bleu et nos peines parisiennes. Merci à Alain Richard et Didier Wolf pour leur accueil et leur soutien.
J’ai la chance d’avoir pu travailler avec des chercheurs brillants, qui m’ont tous, sans exception, apportés en premier lieu Maurice Heemels, Lucian Busoniu, Nathan van de Wouw, Paulo Tabuada, Adolfo Anta, Claudio de Persis, Luca Zaccarian, Antoine Girard et Qinghua Zhang.
Un merci particulier à Stéphane Raël, qui m’a (un peu) réconcilié avec le génie électrique, ainsi qu’à Sébastien Benjamin et Philippe Desprez.
Une pensée également à Mirko Fiacchini et sa famille.
Une pensée chaleureuse envers Elena Panteley, sans qui je ne serai jamais entré au CNRS.
« Last but not the least », j’aimerais profité de ce mémoire pour remercier une nouvelle fois David Goodall, qui fut mon encadrant de master à l’Université de Coventry de 2005 à 2006. Ma modeste carrière débuta avec lui. Il est toujours un exemple pour moi et je m’efforce d’appliquer ses conseils encore aujourd’hui.
Table des matières
1 Présentation générale . . . 17 1.1 Organisation du document . . . 17 1.2 Parcours . . . 17 1.2.1 Encadrement . . . 18 1.2.2 Collaborations . . . 21 1.3 Production scientifique . . . 24I Commande sous contraintes de communication . . . 31
2 Introduction . . . 33 2.1 Problématique . . . 33 2.2 Positionnement . . . 35 3 Échantillonnage événementiel . . . 37 3.1 Introduction . . . 37 3.2 Retour d’état . . . 38
3.2.1 Cadre d’étude hybride . . . 38
3.2.2 Poursuite de trajectoires pour un robot mobile . . . 39
3.3 Retour de sortie robuste . . . 41
3.3.1 Régularisation temporelle . . . 41
3.3.2 Systèmes à deux échelles de temps . . . 43
3.4 Coordination distribuée . . . 43 3.4.1 À l’aide de la passivité . . . 43 3.4.2 Dissipativité . . . 44 3.5 Vers la pratique . . . 45 3.6 Conclusions . . . 46 4 Échantillonnage temporel . . . 47 4.1 Introduction . . . 47 4.2 Poursuite de trajectoires . . . 48
4.3 Systèmes avec action directe . . . 49
4.4 Vers les protocoles industriels . . . 50
4.4.1 FlexRay . . . 51
4.4.2 WirelessHart . . . 51
4.5 Commande optimale en temps discret . . . 52
4.5.1 Stratégie de transmissions économe en énergie . . . 52 11
4.5.2 Planification optimiste . . . 54
4.6 Conclusions . . . 55
II Estimation non-linéaire et applications . . . 57
5 Introduction . . . 59
5.1 Épilepsie . . . 59
5.2 Batteries électrochimiques . . . 60
6 Techniques d’estimation motivées par les neurosciences . . . 63
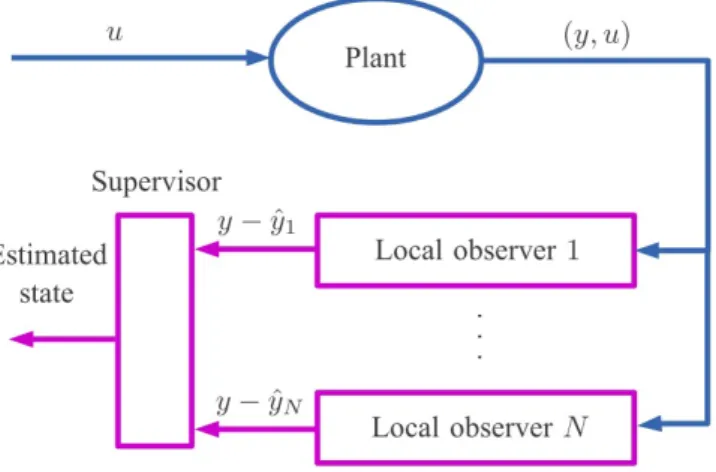
6.1 Introduction . . . 63 6.2 Estimation d’état . . . 63 6.2.1 Problème . . . 63 6.2.2 Observateurs globaux . . . 64 6.2.3 Multi-observateurs . . . 64 6.3 Estimation état-paramètres . . . 66
6.4 Estimation paramétrique qualitative . . . 67
6.5 Conclusion . . . 68
7 Estimation d’état de modèles de batteries électrochimiques au lithium . . . 69
7.1 Introduction . . . 69
7.2 Observateurs continus . . . 70
7.3 Observateur à données échantillonnées . . . 71
7.4 Conclusion . . . 72
III Perspectives . . . 73
8 Perspectives . . . 75
8.1 Dans la continuité . . . 75
8.1.1 Commande sous contraintes de communication . . . 75
8.1.2 Estimation non-linéaire . . . 79
8.2 Nouveau volet : commande optimale en temps discret et techniques d’intelligence artificielle . . . 80
8.3 Conclusions . . . 83
Notation
| · | Norme euclidienne
R L’ensemble des réels
R≥0 L’ensemble des réels positifs ou nul
Z≥0 L’ensemble des entiers naturels incluant zéro
Z>0 L’ensemble des entiers naturels strictement positifs
˙
x La dérivée de la variable x par rapport au temps (à supposer qu’elle existe)
Acronymes
CLF « Control Lyapunov Function »
CRAN Centre de Recherche en Automatique de Nancy EDP Équation aux Dérivées Partielles
EEG, SEEG Électro-enchéphalogrammes, Stéréo-électro-enchéphalogrammes GREEN Groupe de Recherche en Énergie Électrique de Nancy
IA Intelligence Artificielle LMI « Linear Matrix Inequality » LPV « Linear Parameter Varying »
MATI « Maximum Allowable Transmission Interval » RR « Round-Robin »
SATI « Stochastic maximum Allowable Transmission Interval » TOD « maximum-error-first Try-Once-Discard »
Chapitre 1
Présentation générale
1.1
Organisation du document
Mon activité de recherche se structure autour de deux thématiques :
• la commande des systèmes sous contraintes de communication ;
• l’estimation non-linéaire pour les neurosciences, en particulier l’épilepsie, et les
batte-ries électrochimiques.
Les deux premières parties de ce mémoire sont dédiées à chacune de ces thématiques. Dans un troisième temps, j’exposerai les perspectives que j’envisage à court et moyen termes, ce qui correspond à la partie III.
Les travaux qui n’entrent dans aucune de ces deux « cases » sont mentionnés en annexe. Avant de présenter les résultats obtenus, je souhaiterais rappeler brièvement mon par-cours, le cadre dans lequel ces travaux ont été menés et préciser les personnes impliquées ainsi que les articles publiés.
1.2
Parcours
Je suis diplômé de l’ENSEEIHT de Toulouse en tant qu’ingénieur en génie électrique et automatique depuis 2005. J’ai à cette occasion fait mon stage de fin d’études au LAAS avec Isabelle Queinnec sur la construction d’observateurs à entrée inconnue pour des processus de traitement des eaux. Je suis ensuite parti en Angleterre pour y obtenir un « M.Sc. by Research » en automatique à l’Université de Coventry. J’ai ainsi travaillé un an sur la stabili-sation de systèmes non-linéaires à retards par retour de sortie sous l’encadrement de David Goodall. En 2006, j’ai débuté ma thèse de doctorat au L2S (UMR CNRS 8506, Université Paris-Sud, CentraleSupélec) sous la supervision de Françoise Lamnabhi-Lagarrigue, Tarek Ahmed-Ali et Elena Panteley. Le thème fut la construction de lois de commande à données échantillonnées pour des systèmes non-linéaires ainsi que la synthèse d’observateurs pour les systèmes pilotés via un réseau. J’ai soutenu ma thèse de doctorat en novembre 2009, après notamment un séjour de trois mois à l’Université de Melbourne (Australie) dans l’équipe de
Dragan Nešić. Je suis d’ailleurs retourné en post-doctorat à Melbourne, toujours pour tra-vailler avec Dragan, en 2010 et ce pendant sept mois. Je suis ensuite rentré en France pour y prendre un poste de chargé de recherche classe normale CNRS au Centre de Recherche en Automatique de Nancy (CRAN UMR 7038, Université de Lorraine) en janvier 2011, poste que j’occupe depuis
1
.
Les activités de recherche présentées dans ce mémoire furent donc en grande partie conduites au CRAN, mais également pour certains à l’Université de Melbourne.
Le « je » que j’utilise est en réalité un « nous » : les résultats présentés sont tous le fruit de riches échanges avec de nombreuses personnes qu’il est temps d’évoquer.
1.2.1
Encadrement
Je souhaite en premier lieu mentionner les étudiants et post-doctorants que j’ai eu la chance d’encadrer.
Doctorants
• Mahmoud Abdelrahim (2011-2014) co-encadré avec J. Daafouz. Financement : bourse
Erasmus-Mundus. Ces travaux sont décrits au chapitre 3.3. – Sujet : « Output-feedback event-triggered control ». – Date de soutenance : 23 juillet 2014.
– Jury : C. Prieur (Rapporteur, DR CNRS), L. Zaccarian (Rapporteur - DR CNRS, Gipsalab), A. Girard (Examinateur DR CNRS, L2S), L. Hetel (Examinateur -CR CNRS, -CRIStAL), J. Daafouz (Directeur de thèse - PR, -CRAN), R. Postoyan (Co-directeur de thèse).
– Situation actuelle : M. Abdelrahim est « lecturer » à l’université d’Assiut en Egypte. – Publications :
1. M. Abdelrahim, R. Postoyan, J. Daafouz, D. Nešić et W.P.M.H. Heemels,
Co-design of output feedback laws and event-triggering conditions for the L2
-stabilization of linear systems, Automatica, 87, 337- 344, 2018.
2. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Robust event-triggered
output feedback controllers for nonlinear systems, Automatica, 75, 96-108,
2017.
3. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Stabilization of nonlinear
systems using event-triggered output feedback controllers, IEEE Transactions
on Automatic Control, 61(9), 2682-2687, 2016.
1. Plus d’informations sur mon parcours et mon curriculum vitæ en général sont disponibles sur ma page personnelle, accessible en cliquantici.
4. M. Abdelrahim, R. Postoyan et J. Daafouz, Event-triggered control of nonlinear
singularly perturbed systems based only on the slow dynamics, Automatica,
52, 15-22, 2015.
5. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Event-triggered dynamic
feedback controllers for nonlinear systems with asynchronous transmissions,
CDC (IEEE Conference on Decision and Control), Invited Paper, Osaka : Japon, 2015.
6. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Input-to-state
stabiliza-tion of nonlinear systems using event-triggered output feedback controllers,
ECC (European Control Conference), Linz : Autriche, 2015.
7. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Co-design of output
feedback laws and event-triggering conditions for linear systems, CDC (IEEE
Conference on Decision and Control), Invited Paper, Los Angeles : États-Unis, 2014.
8. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Stabilization of nonlinear
systems using event-triggered output feedback laws, MTNS (International
Symposium on Mathematical Theory of Networks and Systems), Groningen : Pays-Bas, 2014.
9. M. Abdelrahim, R. Postoyan et J. Daafouz, Event-triggered control of
nonli-near singularly perturbed systems based only on the slow dynamics, IFAC
Symposium on Nonlinear Control, Invited Paper, Toulouse, 2013.
• Mohammed Hacene Hamid (2012 - ) co-encadré avec J. Daafouz - financement : contrat
doctoral. Ces travaux sont décrits au chapitre 6.2.
– Sujet : « Modeling of the electrical activity of the temporal lobe and study of the synchronization properties for epileptic patients ».
– Situation actuelle : l’étudiant n’est pas allé au bout de l’aventure. – Publications :
1. R. Postoyan, M.H.A. Hamid et J. Daafouz, A multi-observer approach for the
state estimation of nonlinear systems, CDC (IEEE Conference on Decision
and Control), Osaka : Japon, 2015.
2. M.H.A. Hamid, R. Postoyan et J. Daafouz, Local observers design for a class
of neural mass models, ECC (European Control Conference), Linz : Autriche,
2015.
• Niek Borgers de TU Eindhoven (2013-2017) co-encadré avec W.P.M.H. Heemels. Ces
travaux sont décrits au chapitre 3.5.
– Sujet : « Event-triggered control with robust communication properties and gua-ranteed performance ».
– Situation actuelle : ingénieur chez G-Therapeutics (Pays-Bas). – Publication commune :
1. D.P. Borgers, R. Postoyan, A. Anta, P. Tabuada, D. Nešić et W.P.M.H. Heemels, Periodic event-triggered control of nonlinear systems using overapproximation techniques, Automatica, 94, 81-87, 2018.
• Pierre Blondel (depuis 2015) co-encadré avec S. Raël - financement : CIFRE avec
SAFT. Ces travaux sont décrits au chapitre 7.
– Sujet : Estimation d’état de batteries au lithium. – Publications :
1. P. Blondel, R. Postoyan, S. Raël, S. Benjamin et P. Desprez, Nonlinear circle criterion observer design for an electrochemical battery model, IEEE Tran-sactions on Control Systems Technology, disponible en ligne.
2. P. Blondel, R. Postoyan, S. Raël, S. Benjamin et P. Desprez, Observer design for an electrochemical model of lithium ion batteries based on a polytopic approach, IFAC World Congress, Toulouse : France, 2017.
• Mathieu Granzotto (depuis 2016) co-encadré avec J. Daafouz - financement : contrat
doctoral. Ces travaux sont mentionnés dans le chapitre 8.
– Sujet : Analyse de stabilité d’algorithmes de commande optimale à coût infini décompté.
– Publication :
1. M. Granzotto, R. Postoyan, L. Busoniu, D. Nešić et J. Daafouz, Stability
ana-lysis of discrete-time finite-horizon discounted optimal control, IEEE
Confe-rence on Decision and Control, Miami : États-Unis, 2018. Post-doctorants
• Daniele Astolfi (depuis 2016) - financement : post-doc d’excellence (dispositif interne
au CRAN) et région Grand Est. Ces travaux sont décrits au chapitre 6.2.
– Titre : Observateurs unifiés et régulation de sortie des systèmes commandés via un réseau.
– Publications :
1. D. Astolfi, G. Casadei et R. Postoyan, Emulation-based semiglobal output regulation of minimum phase nonlinear systems with sampled measurements, ECC (European Control Conference), Limassol : Chypre, 2018.
2. D. Astolfi, R. Postoyan et D. Nešić , Uniting local and global observers for the state estimation of nonlinear continuous-time systems, CDC (IEEE Conference on Decision and Control), Melbourne : Australie, 2017.
– Situation actuelle : chargé de recherche classe normale du CNRS au LAGEP (UMR 5007, Lyon) à partir de la rentrée 2018.
• Ying Tang (depuis 2015) - financement : ANR JCJC SEPICOT (2015-2016) puis Région
Grand Est (2016-2017). Ces travaux sont décrits au chapitre 6.4. – Titre : Estimation qualitative de paramètres en neurosciences. – Publications :
1. Y. Tang, A. Franci et R. Postoyan, Qualitative parameter estimation for a class of relaxation oscillators, IFAC World Congress, Toulouse : France, 2017. 2. Y. Tang, A. Franci et R. Postoyan, Parameter estimation without fitting : a
qualitative approach, soumis pour publication à un journal international. – Situation actuelle : maître de conférences à l’université Lille 1, CRIStAL (UMR
CNRS 9189).
Stagiaires de master ou de fin d’études
• Jomphop Veetaseveera (2017) co-encadré avec P. Blondel - Estimation d’état de modèles
de batteries lithium-ion à température variable.
• Julian Cornec (2016) - Sujet : Loi d’échantillonnage événementiel à partir de capteurs
librement sélectionnés.
• Marcos César Bragagnolo (2012) - Sujet : « Event-triggered tracking control of mobile
robots ». Publications :
– R. Postoyan, M.C. Bragagnolo, E. Galbrun, J. Daafouz, D. Nešić et E.B. Castelan, Event-triggered tracking control of unicycle mobile robots, Automatica, 52, 302-308, 2015.
– R. Postoyan, M.C. Bragagnolo, E. Galbrun, J. Daafouz, D. Nešić et E.B. Castelan, Nonlinear event-triggered tracking control of a mobile robot : design, analysis and experimental results, NOLCOS (IFAC Symposium on Nonlinear Control), Invited Paper, Toulouse : France, 318-323, 2013.
• Mohammed Hacene Hamid (2012) co-encadré à 50% avec S. Le Cam (MCF, Université
de Lorraine) - Sujet : « Reproduction of the neuronal activity using autoregressive models ».
1.2.2
Collaborations
Sont succinctement présentées ici les collaborations dans lesquelles je suis impliqué sur la période 2010-2018.
Nancy
Au sein du CRAN, je travaille principalement avec Jamal Daafouz (PU, Université de Lorraine), Constantin Morarescu (MCF, Université de Lorraine) et Vineeth Varma (CRCN CNRS) sur la commande des systèmes via un réseau et sur des problématiques de commande optimale en temps discret. Comme mentionné à la section 1.2.1, je co-encadre et ai co-encadré trois thèses avec Jamal Daafouz.
Je collabore également avec Stéphane Raël du GREEN (PU, Université de Lorraine) avec qui j’encadre la thèse CIFRE de Pierre Blondel sur l’estimation d’état de modèles de batteries au lithium en partenariat avec la société SAFT à Bordeaux.
Université de Melbourne
Je travaille de façon soutenue avec Dragan Nešić de l’Université de Melbourne depuis mon premier séjour en Australie en 2009. Dragan est déjà venu cinq fois au CRAN pour des visites mensuelles. Il bénéficie d’ailleurs du dispositif honorifique Professor@Lorraine de l’Université de Lorraine de 2017-2020, qui lui permet de se rendre au CRAN un mois par an pendant cette période.
Notre collaboration n’a cessé de se développer au cours de ces dernières années et touche désormais l’essentiel des mes activités de recherche. Par ricochet, je travaille également avec certains de ses doctorants et post-doctorants, en particulier :
• Michelle Chong (depuis 2010), qui a obtenu son doctorat de l’Université de Melbourne
et qui est désormais en post-doc à KTH à Stockholm. Les travaux de Michelle sont évoqués au chapitre 6.
• Wei Wang (depuis 2013), qui est actuellement en post-doctorat à l’Université de
Mel-bourne. Les contributions sur les systèmes commandés via le réseau FlexRay du cha-pitre 4.4 lui sont largement dus. Nous étudions actuellement la commande à échan-tillonnage périodico-événementielle, cf. chapitre 3.5.
• Alejandro Maass Martinez (depuis 2016), qui est doctorant à l’Université de Melbourne,
il travaille sur les systèmes commandés en réseau via le protocole WirelessHart, cf. chapitre 4.4.
Nous avons plus de quarante cinq publications communes avec Dragan Nešić et son équipe.
TU Eindhoven
Je collabore depuis 2011 avec Maurice Heemels et Nathan van de Wouw de TU Eindhoven aux Pays-Bas sur les systèmes commandés par réseau, mais aussi la stabilité incrémentale des systèmes hybrides, cf. annexe. Ces études impliquent ou ont impliqué des doctorants et un post-doctorant :
• Benjamin Biemond, cf. annexe. • Stefan Heijmans, cf. chapitre 4. • Victor Dolk, travaux en cours.
Nous avons co-signé seize publications. Autres
J’ai également eu la chance de travailler avec nombre d’autres chercheurs, en voici la liste.
• Paulo Tabuada (UCLA, États-Unis) et Adolfo Anta (AIT Austrian Institute of Technology,
Autriche) depuis 2010.
– Commande à échantillonnage événementielle.
– Publications : 2 articles de journaux, 3 articles de congrès, 1 chapitre de livre.
• Lucian Buşoniu (Technical University of Cluj-Napoca, Roumanie) depuis 2012.
– Commande optimale et stabilité, commande des systèmes via un réseau de com-munication.
– Publications : 2 articles de journaux, 3 articles de congrès.
• Alessio Franci (UNAM, Mexique) depuis 2015.
– Estimation qualitative de paramètres en neurosciences.
– Publications : 1 article de congrès, 1 article en cours de ré-évaluation.
• Claudio de Persis (University of Groningen, Pays-Bas) depuis 2013.
– Commande à échantillonnage événementielle.
– Publications : 1 article de journal, 2 articles de congrès.
• Eugênio Castelan (Universidade Federal de Santa Catarina, Brésil) depuis 2014.
– Commande à échantillonnage événementielle.
– Publications : 1 article de journal, 1 article de congrès.
• Antoine Girard (L2S-CNRS, Gif-sur-Yvette) depuis 2015.
– Commande à échantillonnage événementielle. – Publication : 1 article de congrès.
• Navid Noroozi (University of Passau, Allemagne) depuis 2015.
– Systèmes commandés via un réseau.
– Publications : 1 article de journal, 2 articles de congrès.
• Qinghua Zhang (IRISA, Rennes) depuis 2018.
– Observateurs adaptatifs.
1.3
Production scientifique
Sont listées ci-dessous les publications correspondant aux travaux menés depuis 2010 et pour la plupart présentés par la suite.
Revues à comité de lecture
1. S.H.J. Heijmans, R. Postoyan, D. Nešić , N. Noroozi et W.P.M.H. Heemels, Stability
analysis of networked linear control systems with direct-feedthrough terms, Automatica,
96, 186-300, 2018.
2. D.P. Borgers, R. Postoyan, A. Anta, P. Tabuada, D. Nešić et W.P.M.H. Heemels,
Perio-dic event-triggered control of nonlinear systems using overapproximation techniques,
Automatica, 94, 81-87, 2018.
3. J.J.B. Biemond, R. Postoyan, W.P.M.H. Heemels et N. van de Wouw,Incremental stability
of hybrid dynamical systems, IEEE Transactions on Automatic Control, disponible en
ligne.
4. P. Blondel, R. Postoyan, S. Raël, S. Benjamin et P. Desprez,Nonlinear circle criterion
observer design for an electrochemical battery model, IEEE Transactions on Control
Systems Technology, disponible en ligne.
5. M. Abdelrahim, R. Postoyan, J. Daafouz, D. Nešić et W.P.M.H. Heemels, Co-design of
output feedback laws and event-triggering conditions for the L2-stabilization of linear systems, Automatica, 87, 337- 344, 2018.
6. S.H.J. Heijmans, R. Postoyan, D. Nešić et W.P.M.H. Heemels, Computing minimal and
maximal allowable transmission intervals for networked control systems using the hy-brid systems approach, IEEE Control Systems Letters, 1(1), 56-61, 2017.
7. W. Wang, D. Nešić et R. Postoyan,Observer design for networked control systems with
FlexRay, Automatica, 82, 42-48, 2017.
8. R. Postoyan, L. Busoniu, D. Nešić et J. Daafouz, Stability analysis of discrete-time
infinite-horizon optimal control with discounted cost, IEEE Transactions on Automatic
Control, 62(6), 2736-2749, 2017.
9. C. de Persis et R. Postoyan, A Lyapunov redesign of coordination algorithms for
cy-berphysical systems, IEEE Transactions on Automatic Control, 62(2), 808-823, 2017.
10. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Robust event-triggered output
feedback controllers for nonlinear systems, Automatica, 75, 96-108, 2017.
11. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Stabilization of nonlinear systems
using event-triggered output feedback controllers, IEEE Transactions on Automatic
Control, 61(9), 2682-2687, 2016.
12. L. Busoniu, R. Postoyan et J. Daafouz, Near-optimal strategies for nonlinear and
un-certain networked control systems, IEEE Transactions on Automatic Control, 61(8),
13. M. Chong, D. Nešić, R. Postoyan et L. Kuhlman, Parameter and state estimation of
nonlinear systems using a multi-observer under the supervisory framework, IEEE
Tran-sactions on Automatic Control, 60(9), 2336-2349, 2015.
14. W. Wang, D. Nešić, et R. Postoyan,Emulation-based stabilization of networked control
systems implemented on FlexRay, Automatica, 59, 73-83, 2015.
15. R. Postoyan, M.C. Bragagnolo, E. Galbrun, J. Daafouz, D. Nešić et E.B. Castelan,
Event-triggered tracking control of mobile robots, Automatica, 52, 302-308, 2015.
16. R. Postoyan, P. Tabuada, D. Nešić et A. Anta, A framework for the event-triggered
stabilization of nonlinear systems, IEEE Transactions on Automatic Control, 60(4),
982-996, 2015.
17. M. Abdelrahim, R. Postoyan et J. Daafouz, Event-triggered control of nonlinear
sin-gularly perturbed systems based only on the slow dynamics, Automatica, 52, 15-22,
2015.
18. R. Postoyan, N. van de Wouw, D. Nešić et W.P.M.H. Heemels, Tracking control for
nonlinear networked control systems, IEEE Transactions on Automatic Control, 59(6),
1539-1554 2014.
19. M. Chong, R. Postoyan, D. Nešić, L. Kuhlmann et A. Varsavsky,A robust circle criterion
observer with application to neural mass models, Automatica, 48(4), 645-652, 2012
20. M. Chong, R. Postoyan, D. Nešić, L. Kuhlmann et A. Varsavsky, Estimating the
un-measured membrane potential of neuronal populations from the EEG using a class of deterministic nonlinear filters, Journal of Neural Engineering, 9(2), 2012.
21. R. Postoyan et D. Nešić,On emulated nonlinear reduced-order observers for networked
control systems, Automatica, 48, 645-652, 2012.
Actes de colloques à comité de lecture
1. M. Granzotto, R. Postoyan, L. Busoniu, D. Nešić et J. Daafouz, Stability analysis of
discrete-time finite-horizon discounted optimal control, IEEE Conference on Decision
and Control, Miami : États-Unis, 2018.
2. A.I. Maass, D. Nešić, R. Postoyan et P. Dowers, Observer design for networked control
systems implemented over WirelessHART, IEEE Conference on Decision and Control,
Miami : États-Unis, 2018.
3. W. Wang, R. Postoyan, D. Nešić et W.P.M.H. Heemels, Periodic event-triggered
out-put feedback control of nonlinear systems, IEEE Conference on Decision and Control,
Miami : États-Unis, 2018.
4. S.H.J. Heijmans, D. Nešić, R. Postoyan et W.P.M.H. Heemels, A generalized hybrid
Lyapunov proof for networked control systems : improving the maximum allowable
transmission interval, IEEE Conference on Decision and Control, Miami : États-Unis,
5. R. Postoyan et Q. Zhang, Local adaptive observer for linear time-varying systems with
parameter-dependent state matrices, IEEE Conference on Decision and Control, Miami :
États-Unis, 2018.
6. A.M. de Oliveira, V.S. Varma, R. Postoyan, I.-C. Morarescu, J. Daafouz et O.L.V. Costa,
Network-aware state-feedback controllers for linear wireless networked control sys-tems, IFAC ADHS (Conference on Analysis and Design of Hybrid Systems), Oxford :
Royaume Uni, 2018.
7. D. Astolfi, G. Casadei et R. Postoyan, Emulation-based semiglobal output regulation of
minimum phase nonlinear systems with sampled measurements, ECC (European Control
Conference), Limassol : Chypre, 2018.
8. J. Daafouz, R. Postoyan et P. Riedinger, Parameter and state estimation of switched
affine systems, CDC (IEEE Conference on Decision and Control), Melbourne : Australie, 2017.
9. A.I. Maass, D. Nešić , R. Postoyan, P.M. Dower et V.S. Varma, Emulation-based
stabi-lisation of networked control systems over WirelessHART, CDC (IEEE Conference on
Decision and Control), Melbourne : Australie, 2017.
10. D. Astolfi, R. Postoyan et D. Nešić , Uniting local and global observers for the state
estimation of nonlinear continuous-time systems, CDC (IEEE Conference on Decision
and Control), Melbourne : Australie, 2017.
11. M.S. Chong, R. Postoyan, S.Z. Khong et D. Nešić , Supervisory observer for parameter
and state estimation of nonlinear systems using the DIRECT algorithm, CDC (IEEE
Conference on Decision and Control), Melbourne : Australie, 2017.
12. V.S. Varma, R. Postoyan, C. Morarescu et J. Daafouz, Stochastic maximum allowable
transmission intervals for the stability of linear wireless networked control systems,
CDC (IEEE Conference on Decision and Control), Melbourne : Australie, 2017.
13. Y. Tang, A. Franci et R. Postoyan, Qualitative parameter estimation for a class of
relaxation oscillators, IFAC World Congress, Toulouse : France, 2017.
14. P. Blondel, R. Postoyan, S. Raël, S. Benjamin et P. Desprez, Observer design for an
electrochemical model of lithium ion batteries based on a polytopic approach, IFAC
World Congress, Toulouse : France, 2017.
15. N. Noroozi, R. Postoyan, D. Nešić, S.H.J. Heijmans, et W.P.M.H. Heemels, Stability
analysis of networked control systems with direct-feedthrough terms: part I - the non-linear case, CDC (IEEE Conference on Decision and Control), Las Vegas : États-Unis,
2016.
16. S.H.J. Heijmans, R. Postoyan, N. Noroozi, D. Nešić, et W.P.M.H. Heemels, Stability
analysis of networked control systems with direct-feedthrough terms : part II - the
linear case, CDC (IEEE Conference on Decision and Control), Las Vegas : États-Unis,
17. W. Wang, R. Postoyan, D. Nešić et W.P.M.H. Heemels, Stabilization of nonlinear
sys-tems using state-feedback periodic event-triggered controllers, CDC (IEEE Conference
on Decision and Control), Las Vegas : États-Unis, 2016.
18. V.S. Varma et R. Postoyan, Energy efficient time-triggered control over wireless
sen-sor/actuator networks, CDC (IEEE Conference on Decision and Control), Las Vegas :
États-Unis, 2016.
19. R. Postoyan et D. Nešić, Time-triggered control of nonlinear discrete-time systems, CDC (IEEE Conference on Decision and Control), Las Vegas : États-Unis, 2016. 20. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Event-triggered dynamic
feed-back controllers for nonlinear systems with asynchronous transmissions, CDC (IEEE
Conference on Decision and Control), Invited Paper, Osaka : Japon, 2015.
21. R. Postoyan et A. Girard,Triggering mechanism using freely selected sensors for linear
time-invariant systems, CDC (IEEE Conference on Decision and Control), Invited Paper,
Osaka : Japon, 2015.
22. R. Postoyan, J.J.B. Biemond, W.P.M.H. Heemels, et N. van de Wouw,Definitions of
incre-mental stability for hybrid systems, CDC (IEEE Conference on Decision and Control),
Invited Paper, Osaka : Japon, 2015.
23. R. Postoyan, M.H.A. Hamid, et J. Daafouz, A multi-observer approach for the state
estimation of nonlinear systems, CDC (IEEE Conference on Decision and Control),
Osaka : Japon, 2015.
24. R. Postoyan, Quadratic dissipation inequalities for nonlinear systems using
event-triggered controllers, CDC (IEEE Conference on Decision and Control), Osaka : Japon,
2015.
25. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Input-to-state stabilization of
nonlinear systems using event-triggered output feedback controllers, ECC (European Control Conference), Linz : Autriche, 2015.
26. M.H.A. Hamid, R. Postoyan, et J. Daafouz, Local observers design for a class of neural
mass models, ECC (European Control Conference), Linz : Autriche, 2015.
27. C. de Persis et R. Postoyan, Distributed rendez-vous algorithms for a class of
cyber-physical systems, ECC (European Control Conference), Linz : Autriche, 2015.
28. R. Postoyan, L. Buşoniu, D. Nešić et J. Daafouz, Stability of infinite-horizon optimal
control with discounted cost, CDC (IEEE Conference on Decision and Control), Los
Angeles : États-Unis, 2014.
29. W. Wang, D. Nešić et R. Postoyan, Emulated controller design for networked control
systems implemented on FlexRay, CDC (IEEE Conference on Decision and Control),
30. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić,Co-design of output feedback laws
and event-triggering conditions for linear systems, CDC (IEEE Conference on Decision
and Control), Invited Paper, Los Angeles : États-Unis, 2014.
31. M. Chong, D. Nešić, R. Postoyan, et L. Kuhlmann, State and parameter estimation of
nonlinear systems : a multi-observer approach, CDC (IEEE Conference on Decision
and Control), Los Angeles : États-Unis, 2014.
32. W. Wang, D. Nešić et R. Postoyan, Design of observers implemented over FlexRay
networks, AUCC (Australien Control Conference), Canberra : Australie, 2014.
33. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Stabilization of nonlinear
sys-tems using event-triggered output feedback laws, MTNS (International Symposium on Mathematical Theory of Networks and Systems), Groningen : Pays-Bas, 2014.
34. C. de Persis et R. Postoyan,Lyapunov design of event-based controllers for the
rendez-vous of coupled systems, MTNS (International Symposium on Mathematical Theory of
Networks and Systems), Groningen : Pays-Bas, 2014.
35. R. Postoyan, A. Anta, W.P.M.H. Heemels, P. Tabuada et D. Nešić, Periodic
event-triggered control for nonlinear systems, CDC (IEEE Conference on Decision and Control),
Invited Paper, Florence : Italie, 2013.
36. W. Wang, R. Postoyan et D. Nešić, On the uniform global pre-asymptotic stability of
closed sets for switched hybrid systems, AUCC (Australien Control Conference), Perth :
Australie, 2013.
37. R. Postoyan, M.C. Bragagnolo, E. Galbrun, J. Daafouz, D. Nešić et E.B. Castelan,
Non-linear event-triggered tracking control of a mobile robot: design, analysis and experi-mental results, IFAC Symposium on Nonlinear Control, Invited Paper, Toulouse, 2013. 38. M. Abdelrahim, R. Postoyan et J. Daafouz, Event-triggered control of nonlinear
sin-gularly perturbed systems based only on the slow dynamics, IFAC Symposium on
Nonlinear Control, Invited Paper, Toulouse, 2013.
39. L. Buşoniu, R. Postoyan et J. Daafouz, Near-optimal strategies for nonlinear
networ-ked control systems using optimistic planning, ACC (American Control Conference),
Washington : États-Unis, 2013.
40. I.-C. Morarescu et R. Postoyan,Dimension reduction for large-scale networked systems, CDC (IEEE Conference on Decision and Control), Hawaï : États-Unis, 2012.
41. R. Postoyan, N. van de Wouw, D. Nešić et W.P.M.H. Heemels,Emulation-based tracking
solutions for nonlinear networked control systems, CDC (IEEE Conference on Decision
and Control), Hawaï : États-Unis, 2012.
42. R. Postoyan, M. Chong, D. Nešić et L. Kuhlmann,Parameter and state estimation for a
class of neural mass models, CDC (IEEE Conference on Decision and Control), Hawaï :
43. M. Chong, R. Postoyan, D. Nešić, L. Kuhlmann et A. Varsavsky, A circle criterion
observer for estimating the unmeasured membrane potential of neuronal populations,
AUCC (Australian Control Conference), Melbourne : Australie, 2011.
44. R. Postoyan, A. Anta, D. Nešić et P. Tabuada, A unifying Lyapunov-based framework for
the event-triggered control of nonlinear systems, CDC (IEEE Conference on Decision
and Control), Invited Paper, Orlando : États-Unis, 2011.
45. R. Postoyan, P. Tabuada, D. Nešić et A. Anta, Event-triggered and self-triggered
stabi-lization of networked control systems, CDC (IEEE Conference on Decision and Control),
Invited Paper, Orlando : États-Unis, 2011.
46. M. Chong, R. Postoyan, D. Nešić, L. Kuhlmann et A. Varsavsky, A nonlinear estimator
for estimating the activity of neuronal populations, IFAC World Congress, Milan : Italie,
2011.
Communications à des congrès, symposium
1. M. Chong, D. Nešić, R. Postoyan, et L. Kuhlmann, A multiple-model based estimation
algorithm for neural mass models of Epilepsy, 7th International Workshop on Seizure
Prediction, Melbourne : Australie, 2015.
2. M. Chong, R. Postoyan, D. Nešić et L. Kuhlmann, Estimating brain activity, state and
connectivity changes using neural mass models and control theoretic methods, 6th
International Workshop on Seizure Prediction, San Diego : États-Unis, 2013.
3. M. Chong, R. Postoyan, D. Nešić et L. Kuhlmann, Model-based approaches to estimate
population activity from the EEG, 5th International Workshop on Seizure Prediction,
Dresde, Allemagne, 2011. Chapitres d’ouvrages
1. M. Abdelrahim, R. Postoyan, J. Daafouz et D. Nešić, Output feedback event-triggered
control, Delays and Networked Control Systems, A. Seuret, L. Hetel, J. Daafouz et K.H.
Johansson (Eds), volume 6 of the series Advances in Delays and Dynamics, Springer, 113-131, 2016.
2. W.P.M.H. Heemels, R. Postoyan, M.C.F. Donkers, A.R Teel, A. Anta, P. Tabuada, et D. Nešić, Periodic event-triggered control, Event-based control and signal processing, M. Miskowicz (Ed.), CRC Press / Taylor & Francis, 105-119, 2015.
3. D. Nešić et Romain Postoyan, Nonlinear sampled-data systems, Encyclopedia of Sys-tems and Control, Editors : J. Bailleul et T. Samad, Springer-Verlag, Londres : Royaume-Uni, 876-882, 2014.
4. D.R. Freestone, L. Kuhlmann, M. Chong, D. Nešić, D.B. Grayden, P. Aram, R. Postoyan et M.J. Cook, Patient-specific neural mass modelling : stochastic and deterministic
methods, Recent Advances in Predicting and Preventing Epileptic Seizures, Editors :
Première partie
Commande sous contraintes de
communication
Chapitre 2
Introduction
2.1
Problématique
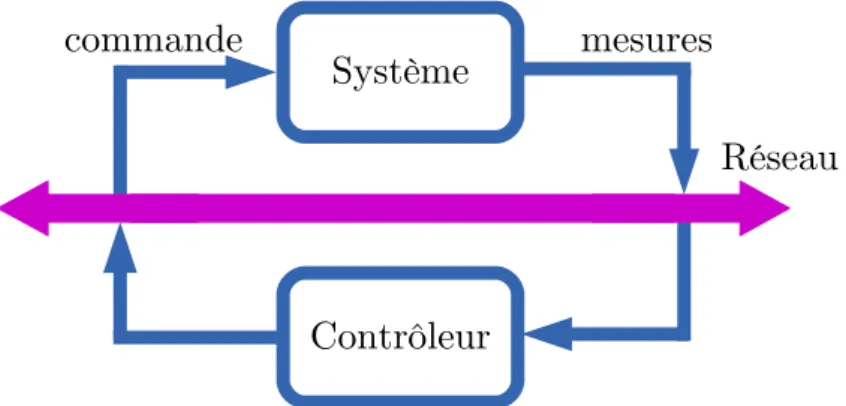
La mise en place de contrôleurs en réseau permet de diminuer le volume et le coût de l’installation, de faciliter la maintenance et offre une plus grande flexibilité comparée aux structures de commande dites classiques par câblage point-à-point. Le pilotage autonome de plateaux d’automobiles [43], la commande de flottes de drones [2], les organes de régulation au sein des véhicules automobiles équipés de réseaux bus CAN sont autant d’exemples d’ap-plications pour lesquels les données transitent entre le système et le contrôleur via un réseau numérique, souvent partagé par diverses tâches. Le réseau assure ainsi les transmissions des données des capteurs et des actionneurs, cf. figure 2.1. En contrepartie, les contraintes de communication induites peuvent fortement affecter le comportement du système et ne peuvent être ignorées lors de la synthèse et l’analyse de la loi de commande. Ces imperfections sont [182] :
• l’échantillonnage (apériodique) des données. Les données ne sont pas échangées en
flux continu mais uniquement à des instants discrets. De plus, ces instants ne sont pas nécessairement espacés périodiquement : leur écart peut fluctuer au cours du temps se-lon le type de réseau et l’état de ce dernier. Nous sortons alors du cadre classique des systèmes à données échantillonnées, très bien développé pour les systèmes linéaires [29], moins pour les systèmes non-linéaires, et qui supposent un échantillonnage pé-riodique la plupart du temps ;
• l’ordonnancement.Les capteurs et les actionneurs sont regroupés en un nombre fini de
nœuds et un seul de ces nœuds a accès au réseau à chaque instant de transmission. Le nœud en question est sélectionné selon une règle définie par le protocole
d’ordon-nancement. En conséquence, lorsqu’il y a plusieurs nœuds, le contrôleur ne reçoit pas
le vecteur de sortie complet du système à chaque transmission et tous les actionneurs ne sont pas mis à jour mais seulement une partie d’entre eux ;
• les retards et pertes de paquet. Le processus de transmission et de réception peut
prendre un temps non-négligeable, ce qui a alors un impact sur les performances du 33
système. Le cas extrême se produit lorsque le message n’arrive jamais à destination, on parle de perte de paquet, phénomène fréquent sur les réseaux sans fil ;
• la quantification des signaux. Pour être envoyés sur le réseau, les mesures et signaux
d’entrée doivent être codés en un nombre de bits fini et donc quantifiés. Ce processus réduit la richesse des informations reçues.
Contrôleur
Système
Réseau
mesures
commande
Figure 2.1 – Schéma d’un système commandé via un réseau.
Dans ce contexte, le défi est de proposer des lois garantissant l’objectif de commande que ce soit en terme de stabilité ou de performance malgré les imperfections induites par le réseau. De toute évidence, le bon fonctionnement de la loi ne peut être assuré que sous certaines conditions sur le réseau. Il s’agit de déterminer une borne sur le temps maximal entre deux transmissions successives, de caractériser les propriétés requises du protocole d’ordonnancement, la longueur maximale admissible des retards, la fréquence des pertes de paquets ou encore de conditions sur la stratégie de quantification.
On distingue deux grandes familles de résultats pour la stabilisation de tels systèmes. La première, qui prédomine, est l’approche par émulation. Il s’agit de construire le contrôleur en ignorant le réseau. À cette étape, nous pouvons piocher dans la panoplie des techniques de commande disponibles dans la littérature pour les systèmes en temps continu. Dans un second temps, le réseau est pris en compte, un modèle du système bouclé complet est établi. Des conditions sur le réseau sont ensuite déterminées afin de préserver (approximativement) les propriétés nominales garanties par le contrôleur en l’absence de contrainte de communication. En d’autres termes, il s’agit d’analyser la robustesse du système bouclé aux erreurs induites par le réseau. Cette approche est sans conteste la plus populaire (cf. e.g., [73,74,76,112,168]) ce qui s’explique par sa simplicité de mise en œuvre et, dans une certaine mesure, d’analyse. En revanche, elle présente le défaut suivant. Les conditions sur le réseau obtenues dépendent du contrôleur sélectionné initialement. Se pose alors la question du choix du contrôleur, ce qui ouvre logiquement la voie à la seconde approche.
Une alternative consiste à directement synthétiser la loi de commande pour le système commandé via le réseau, on parle de co-synthèse, cf. e.g., [20,36,37,119,120,177,180] . Nous pouvons alors fixer des caractéristiques du réseau, comme le temps maximal entre deux
trans-missions ou considérer un protocole d’ordonnancement donné, puis rechercher un contrôleur adapté, à condition qu’il en existe un bien entendu. Il est souvent difficile d’attaquer le pro-blème sous cet angle tout simplement parce que le réseau complique le modèle en boucle fermée. À noter que les techniques de co-synthèse sont parfois fondées sur des résultats préliminaires obtenus par émulation, c’est le cas par exemple de nos travaux évoqués aux chapitres 3.3 et 4.5.1.
2.2
Positionnement
Les systèmes commandés via un réseau font l’objet de nombreux travaux depuis près de vingt ans. Il existe diverses branches selon les contraintes de communication considérées (échantillonnage apériodique, e.g., [33,76,107,115,121], ordonnancement, e.g., [22,26,46,112,
113,168,169], quantification, e.g., [49,55,81,94,108,109], retards et pertes de paquets e.g., [33,58,80,81,112,139,151]), mais aussi les modèles utilisés (linéaire, non-linéaire, discret, hybride, à retard etc.) ou les problèmes posés (stabilisation, commande optimale, estimation etc.).
Dans ce contexte, mes travaux portent principalement sur la stabilisation par émulation et se caractérisent par les points suivants :
• Systèmes non-linéaires. Je me concentre sur les systèmes non-linéaires, dans un souci
de généralité. L’idée n’est pas d’exploiter la structure du système mais plutôt les pro-priétés de stabilité des sous-systèmes composant le modèle complet pour en déduire des conditions explicites sur le réseau.
• Approche hybride. J’utilise et développe dans ce but des outils méthodologiques pour
les systèmes hybrides dans le cadre du formalisme de [63], tout simplement parce que je suis convaincu du bien-fondé de cette approche. Les systèmes commandés via un réseau mêlent phénomènes continus, à l’instar des dynamiques du procédé à piloter, et discrets pour modéliser les transmissions au sein du réseau. Le formalisme de [63] offre un cadre rigoureux en termes de notion de solution et de stabilité et permet de mener des analyses de Lyapunov consistantes avec les outils classiques des temps continu et discret.
• Contraintes de communication.Je m’intéresse particulièrement aux phénomènes
d’échan-tillonnage apériodique et d’ordonnancement
1
.
La suite de cette partie est organisée en deux chapitres selon que les instants de trans-missions ti, i ∈ Z≥0, sont définis en fonction du temps écoulé depuis la dernière transmission
ou de l’état du système. Plus précisément, le premier scénario correspond au cas où, pour tout i ∈ Z≥0,
ε ≤ ti+1− ti ≤ T , (2.1)
1. Les résultats obtenus peuvent souvent être étendus au cas des retards de transmission et aux pertes de paquets au regard des travaux de [73,112]. La quantification quant à elle soulève d’autres difficultés, que je n’ai tout simplement pas abordées ces dernières années.
où ε > 0 est le temps minimal entre deux transmissions et T > 0 le temps maximal admissible, que l’on appellera MATI par la suite (pour « maximum allowable transmission interval »). Le second paradigme consiste à définir les ti en fonction des mesures disponibles, on parle alors de transmission ou d’échantillonnage événementiel. J’ai en effet consacré une part importante de mon activité de recherche à l’étude des systèmes de commande à transmission événementielle. La transmission temporelle (apériodique) des signaux, cf. (2.1), simplifie en général l’analyse et la mise en place de la loi de commande. L’allocation des ressources qui en découle s’avère toutefois souvent trop importante par rapport au cahier des charges. Prenons par exemple le problème de la régulation d’un point d’équilibre en l’absence de perturbations et supposons que le système ait atteint ce point. Il est alors clair qu’il n’est plus nécessaire de mettre à jour la loi de commande, contrairement à ce que fait un échantillonnage dit temporel, et qu’il est donc possible de réduire les coûts de communication et de calcul générés par une telle stratégie. La transmission événementielle consiste à adapter les communications des données et l’exécution du contrôleur en fonction de l’état du système et non du temps, cf. [72]. Le défi est de construire le critère de transmission afin de garantir la stabilité de la boucle fermée mais également l’existence d’un temps minimum entre deux sauts (ε dans (2.1)), fondamentale en pratique et principale difficulté technique.
Chapitre 3
Échantillonnage événementiel
3.1
Introduction
Les contributions rapportées dans ce chapitre se concentrent sur le cas où les transmis-sions des données entre le système et le contrôleur sont définies à l’aide d’un critère qui dépend de l’état du système. L’idée, une nouvelle fois, est d’adapter les instants de communi-cation aux besoins du moment. La plupart des résultats portent sur l’approche par émulation décrite au chapitre précédent. Le défi est alors de définir un critère de transmission qui permet de préserver les propriétés de stabilité désirées tout en garantissant l’existence d’un temps minimum entre deux transmissions successives.
Le premier travail, présenté dans la section 3.2, fut de formaliser le problème dans le cadre des systèmes hybrides de [63] pour le cas de commande par retour d’état. Cela nous a tout d’abord permis de réinterpréter les techniques d’échantillonnage événementiel disponibles à l’époque dans la littérature [89,101,118,159,170], et de relâcher, dans la plupart des cas, les hypothèses initialement requises. Nous avons également mis en avant l’intérêt d’ajouter une variable pour définir la loi d’échantillonnage. Il s’avère que les résultats de simulations effectuées démontrent que de telles lois d’échantillonnage génèrent moins de transmissions que celles dites statiques fondées sur l’écart instantané entre la dernière valeur transmise et l’actuelle. De plus, ajouter une variable nous a également permis d’unifier la technique de transmission temporelle de [115] avec l’échantillonnage événementiel. Ce type de loi corres-pond à ce qu’Antoine Girard appellera par la suite l’échantillonnage événementiel dynamique dans [61]. L’idée d’ajouter une variable pour définir la loi de transmission est devenue au cours du temps un fil rouge de mes travaux sur ce thème, qui nous a permis de lever des difficultés majeures pour la commande par retour de sortie robuste (section 3.3), la coordination de systèmes multi-agents (section 3.4) et la préservation de propriétés de dissipativité (section 3.4).
3.2
Retour d’état
3.2.1
Cadre d’étude hybride
Il est naturel de représenter les systèmes commandés par réseau comme des systèmes hybrides. Cela est d’autant plus vrai dans le cas de transmissions événementielles, comme l’ont également démontré les travaux de [45,149]. En effet, considérons un système non-linéaire
˙ xp = fp(xp, u) (3.1) où xp ∈ R np est l’état et u ∈ R nu
l’entrée de commande, np, nu ∈ Z>0. Supposons que nous
ayons construit le retour d’état ci-dessous pour stabiliser l’origine de (3.1) ˙
xc = fc(xc, xp), u= gc(xp, xc) (3.2) où xc ∈ R
nc
est l’état du contrôleur. De par la présence du réseau, le système (3.1) a désormais accès à ˆu, la version de u perçue via le réseau, et le contrôleur n’utilise plus que ˆ
xp, la version « réseau » de xp. Ces variables ont les dynamiques suivantes ˙ ˆ u ˙ ˆ xp ! = 0 0 ! t ∈(ti, ti+1) ˆ u(t+ i ) ˆ xp(t + i ) ! = u(ti) xp(ti) ! (3.3)
où les ti, i ∈ Z≥0, sont les instants de transmission. Entre ti et ti+1, les variables ˆuet ˆxp sont générées à l’aide de bloqueurs d’ordre zéro. Il s’agit d’un choix de présentation uniquement : les résultats de ce chapitre (et du suivant) sont applicables pour des bloqueurs plus généraux, à l’instar de ceux proposés dans [98].
En introduisant le vecteur e d’erreur induite par le réseau, en d’autres termes e := ˆ
u − u
ˆ
xp− xp
!
, nous pouvons écrire le système complet sous la forme ˙ q= F (q) for q ∈ C , q + = G (q) for q ∈ D , (3.4) où q = (x > p, xc>, e>, η>) >
avec η une variable que nous nous laissons libre d’introduire. L’ensemble C définit la région de l’espace d’état où les solutions du système sont définies par celle de l’équation différentielle, et D celle où ces dernières sont obtenues en résolvant l’équation aux différences. Lorsque q ∈ C ∩ D , la solution peut soit continuer d’évoluer selon celle de l’équation différentielle (à condition que celle-ci reste dans C) ou sauter. Nous constatons que l’unicité des solutions ne peut être garantie, ce qui n’est pas un problème pour notre étude. Plus important, puisqu’un saut de (3.4) représente une transmission, définir la loi de transmission revient à définir les ensembles C et D . En suivant une approche par
émulation, il nous revient donc uniquement de définir C et D . Cette construction doit à la fois garantir la propriété de stabilité désirée et l’existence d’un temps minimum entre deux sauts, autrement le contrôleur ne pourra être implanté en pratique. Nous avons pour cela proposé des conditions de stabilité de type Lyapunov moins restrictives que celles de
1
[63]. En effet, la fonction de Lyapunov n’a pas besoin d’être continûment différentiable mais seulement localement Lipschitzienne, ce qui est essentiel pour de nombreuses lois de transmissions, et la condition sur le flux continu est restreinte aux champs de vecteurs appartenant au cône tangent à C au point considéré
2
. De plus, nous présentons des conditions suffisantes pour garantir l’existence d’un temps de latence entre deux sauts ; ce point étant généralement difficile à traiter. Nous avons ensuite non seulement montré que les lois proposées dans [89,101,118,159,170] peuvent être interprétées dans notre cadre, mais que les hypothèses requises peuvent être relâchées et les techniques employées avec d’autres types de bloqueurs. Nous avons également construit deux nouvelles lois de transmissions, qui font toutes deux appel à une variable auxiliaire η, ce qui fut encore une fois une des originalités de ce travail, originalité reprise depuis dans plusieurs travaux, cf. par exemple [42,61]. Des résultats de simulation ont montré que ces lois sont capables de réduire le nombre de transmissions comparés à [159,170].
Par ailleurs, nous nous sommes intéressés au cas où les actionneurs du système sont distribués et seul l’un d’entre eux peut être mis à jour à chaque transmission selon une loi d’ordonnancement. Le problème est difficile car le vecteur d’erreur e dû au réseau n’est pas remis à zéro à chaque transmission, ce qui pose un problème pour garantir l’existence du temps de latence mentionné ci-dessus. Dans ce cas, la présence de la variable η est essentielle.
Cette étude a fait l’objet des publications suivantes :
• R. Postoyan, P. Tabuada, D. Nešić et A. Anta, A framework for the event-triggered stabilization of nonlinear systems, IEEE Transactions on Automatic Control, 60(4),
982-996, 2015.
• R. Postoyan, A. Anta, D. Nešić et P. Tabuada,A unifying Lyapunov-based framework for the event-triggered control of nonlinear systems, CDC (IEEE Conference on Decision
and Control), Invited Paper, Orlando : États-Unis, 2011.
• R. Postoyan, P. Tabuada, D. Nešić et A. Anta, Event-triggered and self-triggered
stabi-lization of distributed networked control systems, CDC (IEEE Conference on Decision and Control), Invited Paper, Orlando : États-Unis, 2011.
3.2.2
Poursuite de trajectoires pour un robot mobile
Les travaux de la section 3.2.1 sont de nature théorique. J’ai voulu valider leur potentiel sur une application pratique. Dans la cadre du stage de master de Marcos César Bragagnolo,
1. Il s’avère qu’un résultat similaire est mentionné dans le texte de la section IV.B de [144]. 2. Je tiens à remercier Luca Zaccarian pour son aide sur ce résultat.
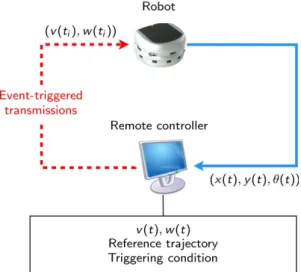
Figure 3.1 – Architecture mise en place à la section 3.2.2 (en anglais)
nous avons ainsi étudié la poursuite de trajectoires d’un robot mobile. Le robot est piloté par un ordinateur décentralisé via un réseau sans fil, ordinateur qui a accès aux variables du robot, x , y, θ , via un réseau câblé haut-débit, que nous avons approximé comme ayant un flux continu, cf. figure 3.2.2. Il s’avère que la théorie de la section 3.2.1 ne couvre pas directement ce problème pour deux raisons. Premièrement, il s’agit d’un problème de stabilisation de trajectoire variant dans le temps et non d’un point d’équilibre (ou d’un ensemble compact). Deuxièmement, les conditions de stabilité initiales requises ne sont pas vérifiées pour le contrôleur considéré [85]. Précisément, le système en boucle fermée n’est pas stable entrée-état [153] par rapport aux erreurs induites par le réseau, nous n’avons à disposition qu’une fonction de Lyapunov faible, cf. [85]. Par conséquent, nous avons proposé un autre type de loi de transmission statique ainsi qu’une analyse de Lyapunov adaptée, qui peuvent être vues comme des variations des principes généraux de [132]. Les résultats obtenus furent validés expérimentalement sur la plateforme de robotique SAMI à l’ENSEM. Nous avons ainsi pu constater la réduction du nombre de transmissions par rapport à une implémentation périodique.
Ces résultats correspondent aux publications suivantes :
• R. Postoyan, M.C. Bragagnolo, E. Galbrun, J. Daafouz, D. Nešić et E.B. Castelan, Event-triggered tracking control of unicycle mobile robots, Automatica, 52, 302-308, 2015.
• R. Postoyan, M.C. Bragagnolo, E. Galbrun, J. Daafouz, D. Nešić et E.B. Castelan, Non-linear event-triggered tracking control of a mobile robot: design, analysis and expe-rimental results, NOLCOS (IFAC Symposium on Nonlinear Control), Invited Paper,
3.3
Retour de sortie robuste
3.3.1
Régularisation temporelle
Les travaux de la section 3.2 supposent que l’état complet du système est mesuré. Cela n’est pas toujours le cas en pratique, il est alors nécessaire de construire des lois par retour de sortie. Cette tâche s’avère être particulièrement ardue pour la commande par transmission événementielle pour la raison suivante [45]. Considérons le cas où l’instant de transmission
ti+1 est le premier instant supérieur à ti tel que
|y(ti) − y(t )| ≥ γ|y(t )| t ≥ ti (3.5) où y est la sortie du système et γ > 0 un paramètre. Ce critère est une transposition de la désormais classique loi de P. Tabuada [159] au cas du retour de sortie. Nous remarquons que lorsque y(t ) = 0, un nombre infini de transmissions a lieu, c’est-à-dire ti+1 = ti+k
pour tout k ≥ 1 : le phénomène de Zénon se produit
3
. Pour éviter cela, des solutions ont été proposées dans la littérature pour les systèmes linéaires. Par exemple dans [45], une constante strictement positive est ajoutée au terme de droite de (3.5), ce qui conduit à une propriété de stabilité pratique et, souvent, à de nombreuses transmissions. A notre connaissance, à l’époque seul [176] traitait de systèmes non-linéaires mais sous des conditions très restrictives.
Le même problème se produit en présence de perturbations exogènes sur les dynamiques ou sur les mesures : le phénomène de Zénon peut apparaître si on applique directement certaines lois d’échantillonnage de la littérature [19].
Dans le cadre de la thèse de Mahmoud Abdelrahim, nous avons proposé une méthode robuste par émulation pour des systèmes non-linéaires qui repose sur des contrôleurs par retour de sortie. L’idée est la suivante : il s’agit de combiner les techniques périodiques et événementielles. Une horloge est utilisée afin de ne pas générer de transmission avant
T unités de temps, où T est la période d’échantillonnage donnée par [115]. Le mécanisme
événementiel du type de (3.5) est ensuite activé. Nous obtenons ainsi une loi de transmission dépendant uniquement de la sortie et du temps écoulé depuis la dernière communication qui garantit l’existence d’un temps de latence entre deux transmissions. De plus, nous sommes assurés de toujours transmettre moins souvent qu’avec l’implémentation périodique de [115]. Bien que le principe soit intuitif, l’analyse n’est pas triviale car nous devons construire une fonction de Lyapunov hybride qui prenne en compte les spécificités des deux techniques.
Nous avons ensuite particularisé ces résultats aux systèmes linéaires. Nous avons dans un premier temps montré que les conditions requises sont toujours vérifiées par les systèmes stabilisables et détectables. Ensuite, nous nous sommes affranchis du cadre de l’émulation
3. Un phénomène similaire apparaît dans le cas de retours d’état, où il est souvent difficile de garantir l’existence d’un temps de latence dans l’attracteur. Néanmoins, dans ce cas, pour une condition initiale dans l’attracteur, une infinité de solutions sont possibles avec pour cas extrêmes une solution qui ne saute jamais et une autre qui ne fait que sauter. Nous pouvons alors forcer n’importe quel temps minimal entre deux sauts. Ce point est analysé en détail dans la fin de la section IV.B de [132].

![Figure 7.1 – Représentation à particule simple d’une batterie lithium-ion [18] (en anglais) 69](https://thumb-eu.123doks.com/thumbv2/123doknet/14706669.748069/70.892.177.676.1003.1113/figure-représentation-particule-simple-batterie-lithium-ion-anglais.webp)
![Figure 7.2 – Allure des fonctions de tension en circuit ouvert de [152], où ζ neg = H neg x et ζ pos = H pos x .](https://thumb-eu.123doks.com/thumbv2/123doknet/14706669.748069/71.892.282.599.113.237/figure-allure-fonctions-tension-circuit-ouvert-neg-neg.webp)
