A condensed transfer function method as a tool for solving vibroacoustic problems
Texte intégral
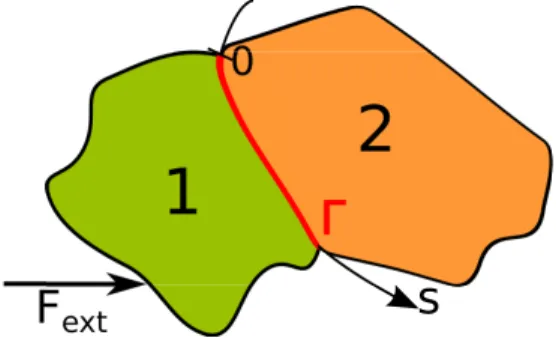
Figure
Documents relatifs
In this paper, an efficient and robust numerical method is proposed to solve non-symmetric eigenvalue problems resulting from the spatial dicretization with the finite element method
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Patch transfer function as a tool to couple linear acoustic problems Morvan Ouisse, Laurent Maxit, C.. Cacciolati,
method for solving the shell-model equations in terms of a basis which includes correlated sub-.. systems is
A representative volume element (r.v.e) is assumed known and its physical (e.g. thermal, elastic) properties are defined in a regular grid of voxels (we maintain the word
Based on QR~\ike décomposition with column pivoting, a new and efficient numerical method for solving symmetrie matrix inverse eigenvalue problems is proposed, which is suitable
We establish recursion relations for the generating functions of the average numbers of (variable or color) assignments at a given height in the search tree, which allow us to
• Show that the Bose symmetry of the photon imposes a constraint on the wave function. • Find the condition on the wave function in order to have a
