Mise au point d’essais simples pour estimer
les propriétés mécaniques et la sensibilité au
gel des sols et des matériaux de chaussées
Mémoire
Dario Fernando Soto
Maîtrise en génie civil
Maître ès sciences (M. Sc.)
Québec, Canada
Résumé
La conception de la structure d’une chaussée dépend en grande partie des caractéristiques du sol qui constituera l’infrastructure, telles que ses propriétés mécaniques réversibles et sa sensibilité à l’eau et au gel. Ces paramètres peuvent être mesurés en laboratoire grâce à l’exécution d’essais très fiables, mais laborieux et dispendieux comme par exemple les essais en cellule triaxiale et celui du potentiel de ségrégation en cellule de gel. L’utilisation des équipements portatifs, comme le déflectomètre LWD et le Percomètre®, permet d’effectuer une évaluation des propriétés du sol. Dix types de sols d’infrastructure ont été testés en laboratoire; les résultats ont été validés avec des essais in situ et corrélés avec les modules réversibles et les potentiels de ségrégation obtenus en laboratoire. Des modèles mathématiques ont été développés permettant une quantification adéquate du module réversible et du potentiel de ségrégation en fonction des propriétés géotechniques du sol.
Table des matières
Résumé ... iii
Table des matières ... v
Liste des tableaux ... xi
Liste des figures ... xiii
Liste des équations ... xvii
Remerciements ... xxi
1 Introduction ... 1
1.1 Objectifs ... 3
2 État des connaissances ... 5
2.1 Sol d’infrastructure ... 5
2.1.1 Cartes d’études pédologiques ... 6
2.2 Conception des chaussées souples ... 6
2.2.1 Conception structurale des chaussés souples ... 7
2.2.1.1 Méthode mécaniste-empirique ... 8
2.2.1.1.1 Fonction de transfert empirique ... 11
2.2.1.1.2 Analyse mécaniste ... 13
2.2.1.2 Propriétés mécaniques des sols d’infrastructure – Module réversible ... 13
2.2.1.3 Facteurs influençant le module réversible ... 19
2.2.1.3.1 Effets des contraintes ... 19
2.2.1.3.2 Effet de l’application des charges cycliques ... 21
2.2.1.3.3 Effet de l’historique des contraintes... 22
2.2.1.3.4 Effet de la granulométrie ... 22
2.2.1.3.5 Effet de la masse volumique ... 23
2.2.1.3.6 Effet de la méthode de compaction ... 23
2.2.1.3.7 Effet de la teneur en eau ... 23
2.2.1.3.9 Effet du degré de saturation ... 29
2.2.1.3.10 Effet de la température ... 29
2.2.2 Conception au gel des chaussés souples... 30
2.2.2.1 Méthodes de conception au gel ... 33
2.2.2.1.1 Méthodes empiriques ... 33
2.2.2.1.2 Méthodes mécanistes-empiriques ... 35
2.2.2.2 Soulèvement au gel – Potentiel de ségrégation ... 35
2.2.2.3 Facteurs influençant le potentiel de ségrégation ... 38
2.2.2.3.1 Effet de la succion moyenne de la frange gelée ... 38
2.2.2.3.2 Effet de la pression de surcharge appliquée sur le front de gel ... 39
2.2.2.3.3 Effet du taux de refroidissement de la frange gelée ... 41
2.2.2.3.4 Effet des propriétés physiques du sol ... 42
2.3 Caractérisation des sols d’infrastructure ... 48
2.3.1 Essais de mesure directe ... 48
2.3.1.1 Essai de module réversible en cellule triaxiale ... 48
2.3.1.1.1 Modélisation de la relation entre le module réversible et l’état de contrainte ... 51
2.3.1.1.2 Correction pour tenir compte des effets de saturation ... 52
2.3.1.2 Essai de potentiel de ségrégation en cellule de gel ... 54
2.3.2 Essais de mesure indirecte ... 55
2.3.2.1 Détermination indirecte des propriétés mécaniques élastiques des sols . 55 2.3.2.1.1 Méthode empirique de caractérisation mécanique du sol support (essai CBR) ... 56
2.3.2.1.2 Essai de déflexion avec déflectomètre portatif (LWD) ... 57
2.3.2.1.3 Module rétrocalculé ... 59
2.3.2.2 Évaluation indirecte de la gélivité des sols... 60
2.3.2.2.1 Mesure de la constante diélectrique avec un Percomètre® ... 61
2.3.3.1 Modèles pour l’estimation du module réversible ... 63
2.3.3.2 Modèles pour l’estimation du potentiel de ségrégation ... 64
2.4 Critères statistiques pour le développement des modèles mathématiques ... 66
2.4.1 Modèle de régression multiple... 66
2.4.2 Qualité du modèle de régression ... 67
2.4.2.1 Coefficient de corrélation de Pearson ... 67
2.4.2.2 Coefficient de détermination ... 68
2.4.2.3 Coefficient de corrélation multiple ... 68
2.4.2.4 Coefficient de détermination ajusté ... 68
2.4.2.5 Test de Fisher ... 69
2.4.2.6 Test de Student ... 72
2.4.2.7 Multicolinéarité ... 74
2.5 Conclusion ... 74
3 Travail expérimental ... 77
3.1 Échantillonnage des sols ... 78
3.2 Essais en laboratoire ... 80
3.2.1 Caractérisation géotechnique ... 80
3.2.2 Essais de mesure directe ... 81
3.2.2.1 Module réversible en cellule triaxiale ... 82
3.2.2.2 Potentiel de ségrégation en cellule de gel ... 84
3.2.3 Essais de mesure indirecte ... 88
3.2.3.1 Essais de déflexion dans un moule en PVC ... 89
3.2.3.1.1 Mesure de la constante diélectrique avec un Percomètre® ... 91
3.2.3.1.2 Essai de déflexion LWD dans le moule en PVC ... 91
3.2.3.2 Essai CBR ... 94
3.3 Essais de validation in situ ... 95
3.3.2 Essais de déflexion avec un déflectomètre LWD ... 97
3.3.3 Essai au cône de sable ... 97
4 Présentation des résultats ... 99
4.1 Essais en laboratoire ... 99
4.1.1 Caractérisation géotechnique ... 99
4.1.1.1 Granulométrie ... 99
4.1.1.2 Relation teneur en eau – masse volumique ... 101
4.1.1.3 Densité relative ... 101
4.1.1.4 Limites de consistance ... 101
4.1.1.5 Valeur au bleu de méthylène ... 101
4.1.2 Essais de mesure directe ... 103
4.1.2.1 Module réversible mesuré en cellule triaxiale ... 103
4.1.2.2 Potentiel de ségrégation mesuré en cellule de gel ... 108
4.1.3 Essais de mesure indirecte ... 113
4.1.3.1 Essais réalisés dans le moule en PVC ... 113
4.1.3.1.1 Propriétés physiques des échantillons ... 113
4.1.3.1.2 Mesure de la constante diélectrique « DV » ... 116
4.1.3.1.3 Détermination du module de surface « Emoule » ... 117
4.1.3.1.3.1 Vérification de la conformité des essais de déflexion ... 117
4.1.3.1.3.2 Calcul du module de surface « Emoule » ... 119
4.1.3.2 Essai CBR ... 123
4.2 Essais de validation in situ ... 125
5 Analyse et développement de modèles ... 129
5.1 Analyse de résultats ... 129
5.1.1 Propriétés mécaniques ... 129
5.1.1.1 Essais de mesure directe – Module réversible en cellule triaxiale (MRwet) .... ... 129
5.1.1.2 Essais de mesure indirecte – Essais de déflexion en laboratoire (Emoule) ...
... 131
5.1.1.3 Relation entre MRwet et Emoule ... 135
5.1.1.3.1 Groupe I ... 142
5.1.1.3.2 Groupe II ... 143
5.1.2 Gélivité ... 143
5.2 Développement de modèles mathématiques ... 145
5.2.1 Modèles mathématiques pour la détermination du module réversible ... 145
5.2.1.1 Modèles mathématiques pour le « Groupe I » ... 147
5.2.1.2 Modèles mathématiques pour le « Groupe II » ... 148
5.2.2 Modèles mathématiques pour la détermination du potentiel de ségrégation.... ... 148
5.3 Essais de validation in situ ... 150
5.3.1 Module de surface « Emoule » et module rétrocalculé « EBack » ... 151
5.3.2 Constante diélectrique en laboratoire « DV » et in situ « DVT » ... 152
6 Discussion ... 155 7 Conclusion ... 161 Bibliographie ... 169 Annexe I ... 177 Annexe II ... 203 Annexe III ... 209 Annexe IV ... 225
Liste des tableaux
Tableau 1. Corrélations pour calculer MR de niveau 2. Adapté du NCHRP (2004a) ... 18
Tableau 2. Valeurs typiques de MR (psi) - Niveau 3. Adapté du NCHRP (2004a) ... 19
Tableau 3. Séquence d’application de charges - AASHTO T307-99 ... 50
Tableau 4. Valeurs suggérées du gradient dMR/dS ... 53
Tableau 5. Valeurs de pression de la pénétration de référence (CBR). Tiré de Huang (2004)... 56
Tableau 6. Force du lien linéaire entre deux variables en fonction de r ... 68
Tableau 7. Force du lien linéaire entre deux variables en fonction de r2 ... 68
Tableau 8. Distribution de Fisher-Snedecor ( = 0,05) ... 71
Tableau 9. Distribution de Student ... 73
Tableau 10. Programme expérimental ... 77
Tableau 11. Localisation des sites d’échantillonnage ... 79
Tableau 12. Localisation des sites d’essais in situ ... 96
Tableau 13. Caractéristiques géotechniques des sols échantillonnés ... 102
Tableau 14. Résultats des essais de module réversible ... 104
Tableau 15. Valeurs de MR obtenues en cellule triaxiale – Échantillon L1 ... 106
Tableau 16. Résultats des essais de potentiel de ségrégation... 109
Tableau 17. Calcul du potentiel de ségrégation – Échantillon L10 ... 112
Tableau 18. Propriétés physiques des échantillons – Essais dans le moule en PVC ... 114
Tableau 19. Valeurs de DV mesurées pour le sol L8 ... 116
Tableau 20. Valeurs d’Emoule calcuées pour l’échantillon L8 – Essai 1 ... 120
Tableau 21. Valeurs d’Emoule moyen pour l’échantillon L8 – Essais 1, 2 et 3... 121
Tableau 22. Résultats des essais CBR – échantillons L1 à L10 ... 123
Tableau 23. Calcul du CBR – Échantillon L2 ... 124
Tableau 24. Propriétés physiques des échantillons – Essais in situ ... 125
Tableau 25. Valeurs d’EBack mesurées in situ – Échantillon T8 ... 126
Tableau 26. Valeurs d’EBack moyen in situ – Échantillon T8 ... 126
Tableau 27. Coefficients obtenus lors des essais du module réversible (MRwet) ... 130
Tableau 28. Hauteur de chute et contrainte verticale - Essai LWD ... 131
Tableau 29. Paramètres des droites « v – d0 » pour les 32 essais de déflexion réalisés ... 133
Tableau 30. Concavité de la courbe « v - Emoule » – Échantillon L8 ... 135
Tableau 31. Contraintes appliquées – Essai LWD ... 138
Tableau 32. Paramètres pour évaluer Emoule et MRwet ... 139
Tableau 33. Tendances de comportement – Échantillon L8 ... 142
Liste des figures
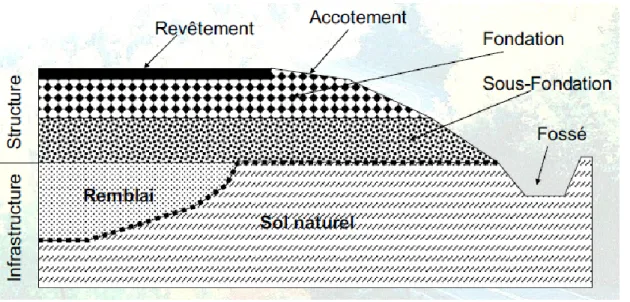
Figure 1. Structure de la chaussée et terminologie reliée. Tirée de Doré (2011) ... 5
Figure 2. Exemple des cartes d’études pédologiques disponibles. Tirée de l’IRDA (2011) ... 6
Figure 3. Étapes de conception mécaniste-empirique. Tirée de NCHRP (2004c) ... 9
Figure 4. Étapes de conception mécaniste-empirique. Tirée de Doré (2011) ... 10
Figure 5. Détérioration de la chaussée - action des charges lourdes (Adaptée de Doré (2011)) .... 11
Figure 6. Module élastique (E). Tirée de Doré (2011) ... 14
Figure 7. Module réversible (MR). Adaptée de Doré & Zubeck (2009a) ... 15
Figure 8. Contraintes 3, d et 1 ... 16
Figure 9. Charges cycliques et déformations résultantes. Adaptée de Doré (2011) ... 17
Figure 10. MR en fonction des périodes d’application des charges. Tirée de Butalia, et al. (2003) . 22 Figure 11. d en fonction de w et l'énergie de compaction. Tirée de Li & Seling (1994) ... 24
Figure 12. Influence de w et d sur le module réversible. Tirée de Seed et al. (1962) ... 25
Figure 13. Comportement hystérétique du module réversible. Tirée de Khoury & Khoury (2009) ... 26
Figure 14. Courbe de Rétention d'Eau (CRE) typique d'un sol argileux. Tirée de Fredlund (1995) ... 27
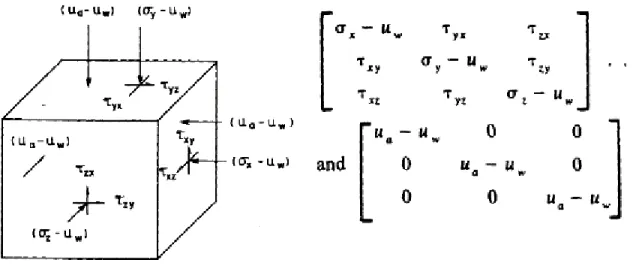
Figure 15. État de contraintes d'un sol non saturé. Tireé de Fredlund & Morgenstern (1977) ... 28
Figure 16. Soulèvements de courte longueur d’onde. Tirée du MTQ (2007) ... 31
Figure 17. Soulèvements de grande longueur d'onde. Tirée du MTQ (2007) ... 31
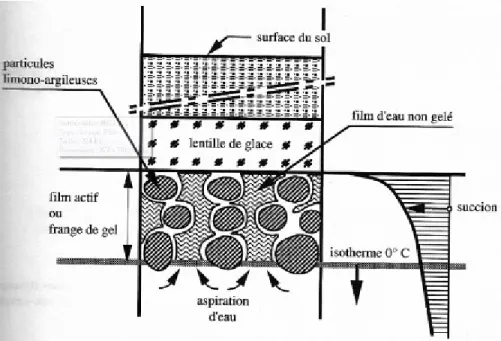
Figure 18. Lentille de glace et film actif. Tirée de Dysli (1991) ... 32
Figure 19. Protection partielle contre le gel. Tirée du manuel Chaussée2 (MTQ, 2006) ... 34
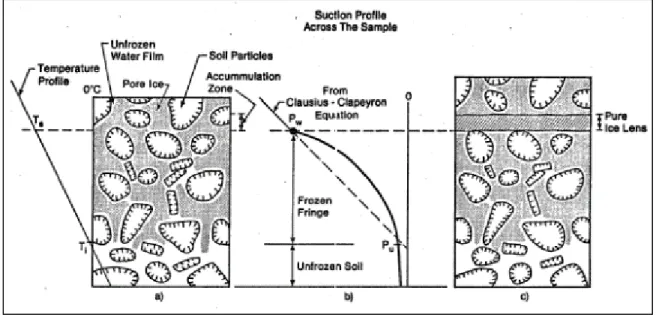
Figure 20. Formation des lentilles de glace. Tirée de Konrad & Morgenstern (1980a) ... 36
Figure 21. Zones en fonction de la nappe phréatique lors du gel. Tirée de Konrad (2000) ... 37
Figure 22. Exemple de SP0 en fonction de la succion. Tirée de Konrad & Morgenstern (1981) ... 39
Figure 23. Effet de la surcharge sur SP0. Tirée de Konrad & Morgenstern (1982a) ... 39
Figure 24. Facteur de correction par surcharge « a ». Tirée de Konrad (1999) ... 40
Figure 25. Refroidissement de la frange gelée. Adaptée de Konrad & Morgenstern (1982b)... 41
Figure 26. Surface caractéristique de soulèvement au gel. Tirée de Konrad & Morgenstern (1982b) ... 42
Figure 27. Analyse de Rieke et al. (1983). Tirée de Konrad (1999) ... 44
Figure 28. Influence de l’arrangement des particules sur SP. Tirée de Konrad (1999) ... 45
Figure 29. Réduction du SP en fonction du nombre de cycles de gel-dégel. Tirée de Konrad (1988a) ... 46
Figure 30. SP en fonction du degré de consolidation des argiles. Tirée de Konrad (1988b) ... 47
Figure 31. SP en fonction de la succion dans le front de gel (pour un indice de vides donné). Tirée de Konrad (1988b) ... 47
Figure 32. Schéma d’une cellule triaxiale. Adaptée de Doré, et al. (2009) ... 49
Figure 33. Cellule de gel. Adaptée de Doré & Zubeck (2009a). ... 55
Figure 34. LWD Prima 100 ... 57
Figure 35. Réponse normale - Essai LWD. Tirée d’Edwards & Fleming (2009) ... 58
Figure 36. (a) Courbe avec rebond, (b) Courbe variable. Tirée d’Edwards & Fleming (2009) ... 58
Figure 37. Zone de contraintes significatives - essai avec LWD. Adaptée de Lambert (2007) ... 60
Figure 38. Tube Suction Test. Adaptée de George & Scullion (2006) ... 62
Figure 39. Sites d’échantillonnage ... 78
Figure 40. Caractérisation géotechnique des sols ... 81
Figure 41. Cellule triaxiale de l'Université Laval ... 82
Figure 42. Cellule de gel de l'Université Laval ... 85
Figure 43. Montage de l’éprouvette pour essai de potentiel de ségrégation ... 86
Figure 44. Détermination du temps Tp. Tirée de MTQ (2002) ... 86
Figure 45. Détermination du taux de soulèvement Tsoul. Tirée de MTQ (2002) ... 87
Figure 46. Détermination du gradient thermique GradT. Adaptée de MTQ (2002) ... 88
Figure 47. Essai de déflexion en moule PVC. Tirée de (Edwards & Fleming, 2009)... 89
Figure 48. Mesure de la contrainte appliquée et la déflexion mesurée ... 90
Figure 49. Mesure de la constante diélectrique dans le moule PVC ... 91
Figure 50. Préparation du déflectomètre ... 92
Figure 51. Modification du degré de saturation de l'échantillon par mouillage ... 93
Figure 52. Modification du degré de saturation de l'échantillon par mouillage ... 93
Figure 53. Presse CBR de l’université Laval ... 94
Figure 54. Lecture de DV in situ (DVT) ... 95
Figure 55. Essai de déflexion in situ ... 97
Figure 56. Essai au cône de sable ... 97
Figure 57. Courbes granulométriques moyennes – Sols à grains grossiers ... 100
Figure 58. Courbes granulométriques moyennes – Sols à grains fins ... 100
Figure 59. MR mesuré en cellule triaxiale – Échantillon L1 ... 107
Figure 60. MR calculé contre MR mesuré – Échantillon L1 ... 107
Figure 61. Évolution de la température à l'intérieur de l'échantillon L10 en fonction du temps ... 110
Figure 62. Soulèvement et profondeur de gel en fonction du temps – Échantillon L10 ... 111
Figure 63. Profil de température pour Tp = 69 h – Échantillon L10 ... 111
Figure 64. Exemple de réponse normale ... 117
Figure 65. Exemples de courbes variables ... 118
Figure 66. Exemple de courbe incomplète ... 118
Figure 67. Essais de déflexion (d0) – Échantillon L8 ... 122
Figure 68. Essais de déflexion (Emoule) – Échantillon L8 ... 122
Figure 70. Essais de déflexion (d0 et EBack) – Échantillon T8 ... 127
Figure 71. Droites de « contrainte – Déflexion » (Échantillon L8) ... 132
Figure 72. Courbes du module de surface – Échantillon L8 ... 134
Figure 73. Modèle axisymétrique d'un essai de déflexion en moule PVC ... 137
Figure 74. MRwet contre Emoule ... 140
Figure 75. Tendances de comportement (MRwet contre Emoule) ... 141
Figure 76. Exemple d’essai du « Groupe I » - Échantillon L8 ... 142
Figure 77. Exemple d’essai du « Groupe II » - Échantillon L8 ... 143
Liste des équations
Équation 1. Critère de fatigue ... 12
Équation 2. Critère de fatigue (Asphalt Institut) ... 12
Équation 3. Critère de déformation permanente ... 12
Équation 4. Critère de déformation permanente (Asphalt Institut) ... 12
Équation 5. Modèle de Boussinesq – Déformation verticale ... 13
Équation 6. Modèle de Boussinesq – Déformation radiale ... 13
Équation 7. Module élastique « E » ... 14
Équation 8. Module réversible « MR » ... 15
Équation 9. Modèle "NCHRP 1-28A" pour le calcul du MR de niveau 1. ... 18
Équation 10. Modèle bilinéaire de Robnett & Thompson (1976). ... 20
Équation 11. Modèle adopté par Moossazadeh & Witczak (1981) ... 20
Équation 12. Modèle de Brown et al. (1975) ... 20
Équation 13. Modèle K-Thêta de Seed et al. (1967) ... 21
Équation 14. MR en fonction de la succion matricielle ... 28
Équation 15. Degré de saturation ... 29
Équation 16. Calcul de la teneur en eau non gelée gravimétrique (Bigl & Berg, 1996) ... 30
Équation 17. Calcul du Mr en fonction de la teneur en eau non gelée (Berg et al, 1996) ... 30
Équation 18. Équation du potentiel de ségrégation (SP) selon Konrad & Morgenstern (1980a) ... 35
Équation 19. Calcul du soulèvement au gel. Konrad & Shen (1996) ... 37
Équation 20. Calcul du potentiel de ségrégation avec surcharge ... 40
Équation 21. Facteur de correction par surcharge « a » ... 40
Équation 22. Taux de refroidissement de la frange gelée ... 41
Équation 23. Pourcentage de la fraction fine requise pour remplir les vides de la fraction grossière ... 44
Équation 24. Modèle mathématique du MR à deux paramètres ... 51
Équation 25. Modèle mathématique du MR à trois paramètres ... 51
Équation 26. Modèle d’Uzan (1985) ... 52
Équation 27. Modèle de Pezo (1993) ... 52
Équation 28. Modèle de Ni et al. (2002)... 52
Équation 29. Correction MR en fonction du degré de saturation. ... 53
Équation 30. Correction MR en fonction du degré de saturation ... 54
Équation 31. Module rétrocalculé (essais de déflexion) ... 59
Équation 32. Module rétrocalculé (Gudishala, 2004) ... 63
Équation 33. Module rétrocalculé (George, 2006) ... 64
Équation 34. Estimation du potentiel de ségrégation (Kuala, 1991) ... 64
Équation 36. Estimation du potentiel de ségrégation (Doré et al., 2004) ... 65
Équation 37. Estimation du potentiel de ségrégation (Konrad, 2005) ... 66
Équation 38. Modèle de régression multiple ... 67
Équation 39. Coefficient de détermination ajusté ... 69
Équation 40. Calcul du paramètre F de Fisher... 69
Équation 41. Test de Fisher ... 70
Équation 42. Statistique t... 72
Équation 43. Test de Student ... 72
Équation 44. Vitesse d’écoulement de l’eau interstitielle vers le front de gel ... 87
Équation 45. Module de surface mesuré en moule ... 90
Équation 46. Calcul du module de surface mesuré en moule... 119
Équation 47. Module réversible à un degré de saturation donné... 130
Équation 48. Droite de déflexion ... 132
Équation 49. Module de surface en fonction de « m » et « b » ... 134
Équation 50. Essai de déflexion en moule PVC. Calcul des contraintes 1 et 3 ... 137
Équation 51. Groupe I – Modèle no 1 ... 147
Équation 52. Groupe I – Modèle no 2 ... 147
Équation 53. Groupe I – Modèle no 3 ... 147
Équation 54. Groupe II – Modèle no 1 ... 148
Équation 55. Groupe II – Modèle no 2 ... 148
Équation 56. Modèle SP – Sols du « Groupe A » ... 150
Équation 57. Modèle SP – Sols du « Groupe B » ... 150
Équation 58. Modèle mathématique – Validation Emoule ... 152
À mon épouse, ma source de courage et persévérance.
Remerciements
Cette recherche a été effectuée grâce à l’appui technique et au soutien financier des partenaires de la Chaire industrielle du CRSNG sur l’interaction Charges Lourdes – Climat – Chaussées i3C de l’université Laval : Ministère des Transports du Québec, Ville de Montréal, Ville de Québec, FPInnovations, Qualitas, LVM, Dessau, BPR, Association du camionnage du Québec, Association des propriétaires de machinerie lourde du Québec, Groupe CTT, Association des constructeurs de routes grands travaux du Québec, Transport Canada, Colas Canada Inc, Solmax Texel Géosynthétiques inc, Opsens Inc, Conseil de recherches en sciences naturelles et en génie du Canada, Michelin Amérique du Nord (Canada).
Je tiens à exprimer ma gratitude à mon directeur de recherche, M. Guy Doré, ing., Ph.D, et à mon codirecteur, M. Jean-Pascal Bilodeau, ing., Ph.D. Leurs conseils et leur appui lors de la réalisation du présent projet de recherche m’ont permis d’améliorer mes compétences en tant que géotechnicien et chargé de projet.
L’accomplissement des objectifs a été rendu possible grâce à la collaboration des étudiants de la Chaire i3C, qui m’ont accompagné et m’ont prêté main-forte durant la préparation et l’exécution du travail expérimental. Je remercie spécialement M. Papa Masseck Thiam, Mme Catherine Savoie, et M. Jonas Depatie. Je voudrais remercier également M. Christian Juneau pour sa disponibilité et ses conseils techniques concernant la réalisation des essais de caractérisation géotechnique.
Je suis reconnaissant envers mes amis, M. Alejandro Quijano et Mme Caludia Mellizo, grâce auxquels j’ai eu l’occasion de faire connaissance avec toutes ces merveilleuses personnes qui font partie de la Chaire i3C.
Finalement, aucun mot ne suffira pour exprimer ma gratitude à mon épouse, Mme Yarledis Coneo, qui est et sera toujours ma source d’inspiration et d’énergie pour surmonter les difficultés et pour accomplir de nouveaux défis.
1 Introduction
La fonction d’une structure de chaussée est de distribuer la charge induite par le trafic lourd en assurant la transmission des contraintes et déformations tolérables par le sol d’infrastructure. À cet égard, l’épaisseur des couches de ladite structure, et donc les coûts associés à sa construction, est fonction des caractéristiques des sols constituant l’infrastructure. En effet, le dimensionnement de la structure de la chaussée dépend en grande partie de la capacité de réponse des sols d’infrastructure aux contraintes d’origine externe et aux variations des conditions de l’environnement. Le passage des camions ainsi que les variations saisonnières du climat provoquent des changements sur le comportement mécanique du sol qui supporte la chaussée, surtout au Québec où le sol est soumis à des températures très basses pendant la période de gel en hiver, puis à des niveaux de saturation élevés durant la période de dégel au printemps.
Le comportement des sols d’infrastructure peut être évalué en fonction de leur capacité à résister aux déformations (propriétés mécaniques) générées par les charges appliquées lors du passage des camions lourds et, également, par leur capacité à conserver leurs propriétés durant les cycles de gel-dégel (sensibilité au gel). Pour ce qui est des propriétés mécaniques, le « guide mécaniste-empirique » (NCHRP, 2004a) de conception des chaussées souples (Guide for Mechanistic-Empirical Design - MEPDG) recommande le Module réversible (MR) comme paramètre à
utiliser pour évaluer la réponse mécanique des sols et des matériaux de chaussée. Dans le cas de la sensibilité au gel, Transports Québec (DLC, 2002) suggère l’utilisation du potentiel de ségrégation (SP). La détermination de ces paramètres peut être effectuée à l’aide de différentes techniques incluant les méthodes de mesure directe, les méthodes de mesure indirecte ainsi que l’utilisation des valeurs par défaut. Par ailleurs, des caractéristiques géotechniques des sols d’infrastructure comme la granulométrie, la masse volumique sèche, la teneur en eau, les limites de consistance, entre autres, peuvent affecter les propriétés mécaniques et/ou leur sensibilité au gel.
Les méthodes de mesure directe de module réversible (MR) et du potentiel de ségrégation (SP)
provoquent de longs délais et sont coûteuses. À ce jour, il est nécessaire d’exécuter des essais complexes en laboratoire qui nécessitent une main d’œuvre spécialisée. Ces méthodes s’avèrent les techniques les plus fiables pour l’évaluation desdits paramètres. La réponse mécanique est donc évaluée par la mesure du MR en cellule triaxiale (NCHRP, 2004a), alors que la sensibilité au gel, elle,
est évaluée par la mesure du SP en cellule de gel (DLC, 2002). Ces essais sont très spécialisés, coûteux et laborieux.
Dans le domaine de la caractérisation indirecte des propriétés des sols d’infrastructure, des recherches récentes ont montré qu’il est possible de les évaluer à l’aide d’équipements portatifs. Ces derniers permettent d’effectuer la mesure de paramètres associés aux propriétés mécaniques des sols comme la déflexion ainsi que des indicateurs de la présence d’eau libre dans les sols, comme la constante diélectrique du sol, que ce soit en laboratoire ou in situ. Par exemple, la détermination du « module rétrocalculé – EBack », à l’aide d’un déflectomètre portatif (LWD), est utilisée par les
responsables des départements routiers de divers pays pour vérifier sur le chantier la conformité de l’ouvrage par rapport aux plans et devis. De plus, l’utilisation du Percomètre® pour mesurer la constante diélectrique des sols sert comme un indicateur de la performance des matériaux de chaussée soumis à l’humidité et à des températures de congélation. Toutefois, aucun protocole permettant d’obtenir des paramètres fiables de la caractérisation mécanique ou de la sensibilité au gel des sols, par la voie de l’utilisation d’équipements portatifs, n’est encore normalisé.
L’utilisation des valeurs par défaut met à l’épreuve les compétences et l’expérience du concepteur. Ce dernier doit choisir parmi une plage de valeurs typiques disponibles sur la forme de tableaux ou de bases de données, et ce, en fonction de la classification du sol en place et de ses caractéristiques géotechniques. L’accès à ces données est généralement gratuit.
Il reste encore beaucoup de travail à faire pour assurer l’évolution des méthodes de caractérisation des sols. Pour ce faire, la « Chaire de recherche industrielle CRSNG sur l'interaction charges lourdes/climat/chaussées (i3C) - Université Laval » (Chaire i3c) effectue des recherches sur le « Comportement des matériaux et des structures de chaussées ». Ce sujet comporte différents sous-thèmes parmi lesquels se trouve le Projet 1A-2 : « Caractérisation des sols et matériaux de chaussées pour supporter l’utilisation de modèles mécanistes-empiriques de conception et d’analyse de chaussées ».
1.1 Objectifs
La présente recherche a pour objectif la mise au point d’essais simples permettant la détermination adéquate, et à un coût raisonnable, du module réversible et du potentiel de ségrégation des sols d’infrastructure, et ce, par rapport aux essais de mesure directe. Pour arriver à cette fin, les objectifs spécifiques sont présentés aux paragraphes suivants.
Établir la relation entre le module réversible (MR) et le module rétrocalculé (EBack) en tenant
compte des caractéristiques géotechniques des sols d’infrastructure;
Identifier la relation entre le potentiel de ségrégation (SP) et la constante diélectrique (DV) en considérant les caractéristiques géotechniques des sols d’infrastructure;
Développer des modèles mathématiques permettant d’évaluer le module réversible (MR) et le
potentiel de ségrégation (SP) des sols d’infrastructure en fonction de leur module rétrocalculé (EBack) et de leur constante diélectrique (DV) respectivement, et ce, en tenant
compte leurs caractéristiques géotechniques;
Mettre au point une méthode d’essai simple pour évaluer le module réversible (MR) à l’aide
d’un déflectomètre portatif (LWD) ainsi que le potentiel de ségrégation (SP) par l’utilisation d’un Percomètre®.
2 État des connaissances
2.1 Sol d’infrastructure
L’un des composants de la structure d’une chaussée est le sol d’infrastructure, ou sol support, lequel peut être constitué d’un sol naturel (sable, argile, till, etc.) ou de matériaux de remblai (sol ou roc), tel que montré à la Figure 1. Le sol support joue le rôle de plate-forme pour la construction et le support de la chaussée. De même, la pente de sa surface facilite le drainage de la structure de chaussée (Doré, 2011).
Figure 1. Structure de la chaussée et terminologie reliée. Tirée de Doré (2011)
Le sol d’infrastructure est souvent compressible ainsi que sensible à l’humidité et au gel. Par ailleurs, il est souvent hétérogène, ce qui le rend susceptible d’entrainer des comportements différentiels. Lorsqu’une mauvaise performance de la chaussée est appréhendée, le concepteur doit choisir entre améliorer le sol d’infrastructure ou adapter la structure de la chaussée pour résister aux problèmes attendus (Doré & Zubeck, 2009). Une source d’information préliminaire permettant l’identification de certains types de sol sont les cartes de dépôts. Ce sont des bases de données qui résultent de différentes études géologiques et pédologiques compilées par le gouvernement du Québec.
2.1.1 Cartes d’études pédologiques
Les différents types de dépôts de surface présents sur le Québec ont fait l’objet d’études pédologiques. Ces études nous renseignent les sols en fonction de leurs propriétés morphologiques, physiques et chimiques.
Une base de données est disponible sur le site web de l’Institut de recherche et de développement en agroenvironnement (IRDA, 2011). Il s’agit d’un recueil d’études pédologiques publié par comté à partir de 1943. Ces études sont aussi disponibles sur le site du service d’information sur les sols du Canada (SISCan) du Ministère d’Agriculture et Agroalimentaire Canada (SISCan, 2011).
La Figure 2 montre un exemple des cartes d’études pédologiques disponibles pour la région administrative de Chaudière-Appalaches.
Figure 2. Exemple des cartes d’études pédologiques disponibles. Tirée de l’IRDA (2011) Ces cartes sont accompagnées d’un rapport expliquant la répartition des sols en fonction de leurs différentes propriétés physiques et leurs valeurs agronomiques.
2.2 Conception des chaussées souples
L’un des principaux objectifs de la conception d’une structure de chaussée souple (conception structurale) est d’assurer la distribution des charges générées pour le trafic lourd sur le sol d’infrastructure sous la forme d’une contrainte admissible, laquelle est fonction des propriétés
mécaniques des sols. Dans le cas des pays froids, un autre critère important est la protection de la chaussée contre le soulèvement dû au gel (conception au gel).
2.2.1 Conception structurale des chaussés souples
La conception structurale des chaussées vise le dimensionnement des différentes couches de la chaussée pour assurer la distribution et la transmission des contraintes afin d’éviter les déformations excessives sur le sol d’infrastructure. Selon Doré (2011), il est possible d’identifier quatre grandes approches, soit les règles de l’expérience, les approches empiriques, les approches analytiques-empiriques ainsi que les approches analytiques. Ces approches de conception montrent l’évolution des méthodes de conception des chaussées par rapport à la méthode qui la précède. Ainsi, la méthode la plus récente incorpore l’analyse des propriétés des sols en place afin d’obtenir une structure plus adaptée aux conditions locales. Les règles d’expérience comportent un recensement des documents sous la forme de guides ou de catalogues de structures de diverses origines. Les approches empiriques sont basées sur les résultats obtenus lors des essais routiers effectués sur des sites expérimentaux. Cela nous a permis d’établir des relations entre les objectifs de conception, les caractéristiques et les conditions spécifiques des matériaux, jusqu’aux épaisseurs requises des couches de la structure de la chaussée. Un bon exemple de cette approche est la méthode de l’American Association of State Highway and Transportation Officials (AASHTO). Les approches analytiques-empiriques ou mécanistes-empiriques intègrent des modèles de calculs théoriques aux méthodes empiriques. Le modèle empirique correspond à une fonction de transfert empirique permettant le calcul de la performance de la chaussée à partir des contraintes et des déformations admissibles obtenues en fonction du trafic projeté. Le modèle mécanique sert à calculer les épaisseurs de couches requises pour éviter la fatigue à la base de la couche du revêtement ainsi que la déformation permanente au sommet du sol d’infrastructure; il permet de valider l’atteinte des valeurs de déformation admissibles pour la structure de chaussée candidate. Ces méthodes sont complexes et sont généralement supportées par des outils informatiques, notamment les méthodes de conception françaises (Alisée et Écoroute), la méthode de l’Asphalt Institute (DAMA), la méthode MnPave, la méthode MePADs et le DARWin-ME.
Les méthodes analytiques sont encore en développement. Leur objectif est d’utiliser des modèles mécanistes pour dimensionner la structure de la chaussée et de sa performance. Parmi ces modèles se trouvent le modèle d’uni MMOPP et le modèle d’orniérage CASTOR.
La conception au gel vise à assurer la protection de la chaussée en minimisant les soulèvements différentiels résultants du gonflement des sols gélifs durant l’hiver. Ces soulèvements contribuent à la détérioration hivernale de l’uni et à la formation des fissures longitudinales et des lézardes. La prise en compte du soulèvement au gel (Doré, 2012) peut être effectuée selon deux méthodes : les méthodes empiriques et les méthodes mécanistes-empiriques. Les méthodes empiriques de protection partielle contre le gel utilisent le critère de l’indice de gel pour déterminer l’épaisseur totale de la chaussée selon le type de sol d’infrastructure et la classe de route (MTQ, 2010a). L’indice de gel est la sommation des températures moyennes journalières négatives enregistrées au cours d’une certaine période. Les méthodes mécanistes-empiriques de conception au gel sont basées sur le calcul du soulèvement au gel (calcul mécaniste), qui est par la suite comparé à une valeur admissible basée sur l’expérience (volet empirique). Autrement dit, le dimensionnement de la chaussée a pour but de limiter le temps d’exposition du sol d’infrastructure à l’action du gel ou d’éviter au gel d’atteindre les sols sensibles à celui-ci et ainsi de minimiser l’endommagement du revêtement (MTQ, 2006). Le logiciel Chaussée 2 est un outil informatique qui offre aux concepteurs les deux méthodes de calcul (empirique et mécaniste).
En fin de compte, la conception des chaussées, dans les pays froids comme le Canada, comporte deux grands volets : la conception structurale et la conception au gel. À ce jour, les modèles mécanistes-empiriques commencent à remplacer l’utilisation des règles de l’expérience. De plus, les nouvelles recherches poussent le développement des méthodes de calcul favorisant l’utilisation des approches analytiques.
2.2.1.1 Méthode mécaniste-empirique
Le guide mécaniste-empirique (Guide for Mechanistic-Empirical Design - MEPDG) présente la méthode mécaniste-empirique pour le dimensionnement structural des chaussées souples (NCHRP, 2004c). Cette méthode correspond à une procédure itérative de calcul qui évalue différentes structures, parmi lesquelles le concepteur doit choisir parmi celles qui répondent le mieux aux objectifs de conception. La Figure 3 montre les étapes de conception mécaniste-empirique d’une chaussée souple.
Figure 3. Étapes de conception mécaniste-empirique. Tirée de NCHRP (2004c)
La première étape (Inputs) est la définition des objectifs de conception tels que la durée de vie de la chaussée, le trafic projeté, le niveau de service. Ces objectifs dépendent aussi du climat, de la qualité des matériaux de chaussée et des caractéristiques du sol d’infrastructure. La deuxième étape (Analysis) est le dimensionnement de la structure de la chaussée à l’aide des modèles de calculs mécanistes et empiriques. Les modèles de calculs empiriques servent à établir les critères de la performance à l’aide d’un modèle de transfert empirique qui est utilisé pour déterminer les déformations que la structure peut supporter aux interfaces critiques. Cette estimation se fait par rapport aux charges appliquées par le trafic projeté au long de la durée de vie de la chaussée (performance criteria). Les modèles mécanistes (pavement analysis models) aident à calculer la réponse structurale cumulative de chaque cycle de charge appliqué par le trafic. De cette manière, les contraintes et les déformations sont calculées selon la théorie élastique des systèmes multicouches ou par l’utilisation de modèles utilisant la méthode des éléments finis. Cette étape de la conception est itérative, car il faut évaluer différentes configurations des couches jusqu’au dimensionnement d’une structure appropriée. Une structure est considérée appropriée lorsque les contraintes et déformations calculées sont inférieures ou égales à celles établies pour les modèles empiriques (performance criteria). La troisième étape (Strategy selection) est la sélection de
l’alternative à retenir en fonction des critères économiques et de la performance prévue de la chaussée.
La Figure 4 (tirée de Doré (2011)) présente de façon plus simple les deux premières étapes précédemment indiquées de la méthode de conception mécaniste-empirique, soit la définition des objectifs de conception (Inputs) et l’utilisation des modèles de calculs mécanistes et empiriques pour le dimensionnement de la structure de la chaussée (Analysis).
Figure 4. Étapes de conception mécaniste-empirique. Tirée de Doré (2011)
L’étape d’analyse mécaniste-empirique évalue, entre autres choses, la réponse mécanique des matériaux de chaussée soumis aux charges du trafic lourd. La Figure 5 montre un schéma de la distribution des charges lourdes et son effet sur la structure de la chaussée. Il existe différentes méthodologies basées sur la conception mécaniste-empirique (Doré & Zubeck, 2009). C’est le cas de : NCHRP-MEPDG, AKPAVE (Alaska, États-Unis), MnPAVE (Minnesota, États-Unis), OPAC (Ontario, Canada), Finland. Toutes ces méthodologies comportent, au moins, un composant d’analyse empirique et un composant d’analyse mécaniste. Certaines d’entre elles ont incorporé un composant probabiliste pour estimer la fiabilité de la prédiction de la performance de la chaussée. Selon la méthode MEPDG de la NCHRP (2004c), les paramètres critiques pour le dimensionnement structural de la chaussée sont les contraintes et les déformations radiales (r et r en tension) à la
base du revêtement et les contraintes et les déformations verticales (v et v en compression) au
sommet du sol d’infrastructure. La déformation radiale « r »favorise la fatigue du bas vers le haut et
la génération des fissures dans la couche de revêtement, spécialement sous les sentiers des roues. La déformation verticale « v » qui se produit au sommet du sol d’infrastructure est associée à la
déformation permanente qui se présente dans la chaussée sous la forme d’une ornière structurale suivant les sentiers de roues. Ce type d’ornière est caractérisé par un grand rayon de courbure.
Figure 5. Détérioration de la chaussée - action des charges lourdes (Adaptée de Doré (2011))
2.2.1.1.1 Fonction de transfert empirique
Le composant d’analyse empirique de la méthode mécaniste-empirique définit les valeurs admissibles des déformations « r » et « v » en fonction du nombre projeté d’applications de charges
lourdes sur la chaussée. Il s’agit donc de déterminer quelles sont les déformations que la structure de la chaussée peut subir, lors de l’application des charges du trafic lourd, sans excéder un degré de dégradation tolérable par les matériaux.
Des entreprises comme L’Asphalt Institute, Shell, U.K. Transport & Road Research Laboratory et le Belgian Road Research Center ont développé des fonctions de transfert empiriques pour calculer la fatigue « r » et la déformation permanente « v », en fonction du trafic, avec des équations de la
forme (Huang, 2004) :
r
v Ornière structurale Fissuration par fatigue𝑁
𝑑= 𝑓
4𝜀
𝑣 −𝑓5𝑁
𝑓= 𝑓
1𝜀
𝑟 −𝑓2𝐸
1 −𝑓3𝑁
𝑓= 0,0796 𝜀
𝑟 −3,291𝐸
1 −0,854𝑁
𝑑= 1,365 × 10
−9𝜀
𝑣 −4,477Critère de fatigue (déformation radiale « r ») :
Équation 1. Critère de fatigue
Où : Nf : Nombre d’applications de charge (ÉCAS) utilisé en conception pour la période
considérée pour le critère de fatigue; r : Déformation radiale admissible (tension);
E1 : Module du béton bitumineux (psi);
f1, f2, f3 : Constantes de régression.
L’Asphalt Institute propose des valeurs de f1 = 0,0796, f2 = 3,291 et f3 = 0,854 pour limiter la
fissuration au 20% de la surface du revêtement sous les sentiers de roues (Équation 2).
Équation 2. Critère de fatigue (Asphalt Institut) Critère de déformation permanente (déformation verticale « v ») :
Équation 3. Critère de déformation permanente
Où : Nd : Nombre d’applications de charge (ÉCAS) utilisé en conception pour la période
considérée pour le critère de déformation permanente; v : Déformation verticale admissible (compression);
f4, f5 : Constantes de régression.
L’Asphalt Institute propose des valeurs de f4 = 1,365 x 10-9 et de f5 = 4,477 pour limiter la génération
d’orniérage, par déformation permanente, à 13 mm (Équation 4).
2.2.1.1.2 Analyse mécaniste
L’analyse mécaniste, tirée de la méthode mécaniste-empirique, emploie des théories basées sur le comportement mécanique des matériaux de chaussée pour calculer la réponse de la chaussée. Des modèles mathématiques sont utilisés pour calculer les contraintes et les déformations au droit de la structure en fonction des propriétés élastiques des matériaux de chaussée.
La chaussée est modélisée comme un système de couches élastiques (système multicouches) constitué des matériaux homogènes et isotropes sur lequel est appliquée une charge idéalisée. Des exemples des modèles du calcul de réponse mécanique sont le système monocouche de Boussinesq, le modèle des épaisseurs équivalentes d’Odemark ainsi que le modèle de Burminster à « n » couches (Doré, 2011).
Le modèle de Boussinesq comporte une série d’équations, notamment les équations pour calculer les déformations verticales « v » et radiales « r » résultantes de l’application d’une charge uniforme
« 0 » de rayon « a » sur la surface du sol. Les déformations sont calculées à une profondeur « z »
et les propriétés considérées du matériau sont le module élastique « E » et le coefficient de Poisson « µ ». Les équations pour la déformation verticale et radiale sont montrées ci-dessous.
𝜀𝑧 = 1 + µ 𝜎0 𝐸 [ 1 − 2µ + 2µ𝑧 𝑎2+ 𝑧2 0,5− 𝑧3 𝑎2+ 𝑧2 1,5]
Équation 5. Modèle de Boussinesq – Déformation verticale
𝜀𝑟 = 1 + µ 𝜎0 2𝐸 [ 1 − 2µ + 2 1 − µ 𝑧 𝑎2+ 𝑧2 0,5 + 𝑧3 𝑎2+ 𝑧2 1,5]
Équation 6. Modèle de Boussinesq – Déformation radiale
2.2.1.2 Propriétés mécaniques des sols d’infrastructure – Module réversible
Le concept d’élasticité implique que le comportement mécanique des matériaux peut être décrit par le module élastique « E » et leur coefficient de Poisson « µ », où la réponse aux charges multiples est calculée selon le principe de superposition D’Alembert (Papagiannakis & Masad, 2008). Le calcul de la réponse élastique des systèmes multicouches est une modification de l’approche de Burminster et son application se fait par l’utilisation des programmes informatisés tels que DAMA, ELSYM5,
𝐸 = 𝜎 𝜀
KELAYER, EVERSTRESS, WinJULEA, entre autres. Toutefois, les matériaux des chaussées sont considérés comme étant non linéaires, car la valeur de leur module élastique « E » dépend des contraintes appliquées. Ainsi, il est recommandé d’utiliser des logiciels des éléments finis pour modéliser le comportement non linéaire des structures de chaussées (NCHRP, 2004a).
D’un côté, le module « E » est une propriété mécanique qui décrit la rigidité des matériaux. Cette propriété est caractérisée par une valeur constante, car elle ne dépend pas de la variation des contraintes appliquées. Cela implique l’existence d’une tendance à surestimer la capacité de réponse mécanique des sols par rapport aux comportements non linéaires (Nazarian, et al., 2003). Le module « E » est donc décrit par un comportement élastique et linéaire, tel qu’il est montré à la Figure 6, ainsi que l’équation suivante exprimée en fonction de la contrainte « » et de la déformation « » :
Équation 7. Module élastique « E »
Figure 6. Module élastique (E). Tirée de Doré (2011)
De l’autre côté, le comportement élastoplastique non linéaire (Figure 7) est caractérisé par une déformation élastique ou réversible « r » et d’une déformation plastique ou permanente « p ». De
cette manière, si la contrainte appliquée sur le sol est petite par rapport à la rigidité du matériau, la déformation est presque complètement réversible (Huang, 2004). La valeur du module change en fonction de la contrainte appliquée. Le module élastique calculé en fonction de la déformation réversible est connu comme le Module réversible « MR ». Cette valeur est dépendante du niveau de
𝑀
𝑟= 𝜎
𝑑𝜀
𝑟Figure 7. Module réversible (MR). Adaptée de Doré & Zubeck (2009a)
Le module réversible se calcule comme suit :
Équation 8. Module réversible « MR »
La Figure 8 montre les contraintes auxquelles un échantillon représentatif du sol d’infrastructure est soumis lors du passage d’un véhicule lourd. À noter que sur un échantillon de sol non confiné (3 = 0), la contrainte déviatorique « d » est égale à la contrainte verticale (d = 1). Par contre, si
l’échantillon de sol est confiné (3 > 0), « d » est égal à l’excès de la contrainte verticale par rapport
à la contrainte de confinement, soit d = 1 - 3. La déformation réversible résultante de l’application
de ces contraintes est « r ».
L’essai qui permet de déterminer le module réversible en laboratoire est l’essai triaxial. Celui-ci est effectué sur une éprouvette de sol qui est soumise à une pression de confinement « 3 » et à
l’application des charges verticales répétées « d ».
L’application cyclique de charges verticales sur l’éprouvette sert à simuler les charges du trafic lourd sur la structure de la chaussée. La Figure 9 montre les temps d’impulsion et de repos des charges cycliques qui peuvent varier selon le protocole d’essai utilisé.
Figure 9. Charges cycliques et déformations résultantes. Adaptée de Doré (2011)
Le guide mécaniste-empirique « MEPDG » indique que, selon la méthode utilisée pour déterminer le « MR », l’évaluation de propriétés réversibles des sols peut être classifiée en trois niveaux de fiabilité
(NCHRP, 2004a), soit les niveaux 1, 2 et 3.
Le niveau 1 recommande l’exécution de l’essai en cellule triaxiale en laboratoire selon la méthode AASHTO T307. Ensuite, le « MR » est calculé en utilisant une loi constitutive pour décrire le
comportement du sol en fonction de la contrainte à partir des données issues de l’essai triaxial. À cet effet, le MEPDG appuie le modèle NCHRP 1-28A :
Impulsion
Repos
d temps temps Charge DéformationÉquation 9. Modèle "NCHRP 1-28A" pour le calcul du MR de niveau 1.
Où : MR : Module réversible;
: Contrainte totale, = 1 + 2 + 3;
1 : Contrainte axiale totale;
2,3 : Contraintes de confinement (2=3 pour une éprouvette cylindrique);
oct : Contrainte octaédrique 𝜏𝑜𝑐𝑡= 13√ 𝜎1− 𝜎2 2+ 𝜎1− 𝜎3 2+ 𝜎2− 𝜎3 2 ;
Pa : Pression atmosphérique;
k1, k2, k3 : Constantes de régression.
Le niveau 2 suggère l’utilisation des corrélations existantes entre les propriétés réversibles et d’autres propriétés des matériaux des chaussées, notamment celles montrées dans le Tableau 1.
Le niveau 3 propose, avec réserve, des valeurs approximatives typiques de MR en fonction de la
classification du sol. Le Tableau 2 montre un exemple de quelques valeurs typiques de MR (en psi).
Tableau 2. Valeurs typiques de MR (psi) - Niveau 3. Adapté du NCHRP (2004a)
2.2.1.3 Facteurs influençant le module réversible
Dans le cas d’une structure de chaussée soumise aux charges induites par le trafic lourd, certains facteurs peuvent altérer de façon significative sa durée de vie et sa réponse mécanique. Ces facteurs sont liés principalement à l’application des contraintes, la granulométrie, la présence d’eau, et la température dans le sol.
2.2.1.3.1 Effets des contraintes
L’un des principaux facteurs qui peut affecter le module réversible « MR » est l’application des
charges cycliques induites par le trafic lourd ainsi que l’ordre de grandeur des contraintes associées, soit la contrainte déviatorique « d » et la contrainte de confinement « 3 ». Ainsi, par exemple, la
valeur du « MR » des sols cohésifs non saturés diminue si « d » augmente et augmente si « 3 »
augmente (Butalia, et al., 2003). À cet égard, Li & Seling (1994) indiquent que des modèles mathématiques, comme l’Équation 10 proposée par Robnett & Thompson (1976), l’Équation 11 adoptée par Moossazadeh & Witczak (1981) ou l’Équation 12 proposée par Brown et al. (1975), illustrent la dépendance du module réversible par rapport aux contraintes appliquées :
𝑀𝑅 = 𝑘1+ 𝑘2𝜎𝑑; 𝑠𝑖 𝜎𝑑 < 𝜎𝑑𝑖 𝑀𝑅 = 𝑘3+ 𝑘4𝜎𝑑; 𝑠𝑖 𝜎𝑑 < 𝜎𝑑𝑖
Équation 10. Modèle bilinéaire de Robnett & Thompson (1976). Où : MR : Module réversible;
d : Contrainte déviatorique;
di : contrainte déviatorique pour laquelle change la pente du MR contre d;
k1, k2, k3, k4 : Constantes de régression.
𝑀𝑅 = 𝑘𝜎𝑑𝑛
Équation 11. Modèle adopté par Moossazadeh & Witczak (1981) Où : MR : Module réversible;
d : Contrainte déviatorique;
k, n : Paramètres qui dépendent du type de sol et de ses propriétés physiques.
𝑀𝑅 = 𝑘 (
𝜎𝑑 𝜎′3)
𝑛
Équation 12. Modèle de Brown et al. (1975) Où : MR : Module réversible;
d : Contrainte déviatorique;
3 : Contrainte effective de conditionnement;
k, n : Paramètres qui dépendent du type de sol et de ses propriétés physiques.
D’autres exemples des modèles de calcul du MR en fonction des contraintes sont l`Équation 9 et le modèle k-Thêta (Équation 13) de Seed et al. (1967). Cette dernière a été développée pour les sols granulaires et incorpore le concept de contrainte totale pour tenir compte de la contrainte axiale (1)
𝑀𝑅 = 𝑘1𝑝𝑎(𝜃 𝑝𝑎)
𝑘2
Équation 13. Modèle K-Thêta de Seed et al. (1967) Où : MR : Module réversible;
: contrainte totale = 1 + 2 +3;
1 : Contrainte axiale totale;
2,3 : Contraintes de confinement (2=3 pour une éprouvette cylindrique);
Pa : pression atmosphérique;
k1, k2, k3 : Constantes de régression.
2.2.1.3.2 Effet de l’application des charges cycliques
Les vides ou interstices du sol peuvent être occupés par l’eau de façon partielle (sols non saturés) ou totale (sols saturés). Par conséquent, l’application d’une charge peut générer une augmentation de la pression d’eau à l’intérieur de l’échantillon (pression interstitielle) lorsque la capacité de drainage est insuffisante. De cette manière, lors de l’application d’une charge sur un sol saturé, la contrainte est transmise initialement à l’eau dans les interstices. Cela génère une augmentation de la pression interstitielle (Holtz & Kovacs, 1981). Sous l’application des charges cycliques, la pression de l’eau dans les vides de l’échantillon augmente après plusieurs cycles, produisant ainsi une pression interstitielle résiduelle qui se dissipe en fonction du temps. Dans cet ordre d’idées, des contraintes déviatoriques élevées, de même que de courtes applications de charge, ont tendance à créer de hautes pressions interstitielles résiduelles nécessitant un temps de dissipation long (Butalia, et al., 2003). La Figure 10 montre l’effet de la pression interstitielle résiduelle sur le MR (non drainé) en
fonction de la contrainte déviatorique pour un échantillon saturé d’argile de basse plasticité (classification CL), où le MR augmente avec la diminution de la contrainte déviatorique et avec
Figure 10. MR en fonction des périodes d’application des charges. Tirée de Butalia, et al.
(2003)
2.2.1.3.3 Effet de l’historique des contraintes
Lekarp, et al. (2000) ont résumé les conclusions obtenues par différents chercheurs sur l’effet de l’historique de contraintes sur le module réversible. L’historique de contraintes est une conséquence de la densification progressive et du réarrangement des particules du sol provoqué par l’application des charges répétées (Dehlen, 1969). Son effet peut être éliminé et ainsi assurer une réponse mécanique du sol dans le domaine des déformations réversibles. Pour ce faire, le sol doit être conditionné par l’application d’environ 1000 cycles de charge de la même valeur (Allen, 1973).
2.2.1.3.4 Effet de la granulométrie
L’effet de la granulométrie sur le MR a été étudié principalement sur les sols granulaires. Le point de
référence a été le comportement des coefficients k1 et k2 du modèle k-Thêta (Équation 13). Lee et
al. (1993) mentionnent les conclusions de chercheurs tels que Hicks & Monismith (1971) et Rada & Witczak (1981), d’après lesquelles, les valeurs de k1 te de k2 diminuent légèrement lorsque
augmente le pourcentage de fines passant le tamis de 80µm (p080). À cela s’ajoute le fait que, pour
les sols granulaires ayant une granulométrie ouverte, l’effet de p080 sur k1 est d’environ 5%, tandis
que pour les sols granulaires ayant une granulométrie fermée, cet effet peut varier entre 31 et 64%. La description de k1 te de k2 est présentée à la section 0.
2.2.1.3.5 Effet de la masse volumique
Lekarp, et al. (2000) ont cité les travaux de Kolisoja (1997) et Barksdale & Itani (1989) concernant l’effet de la masse volumique des sols granulaires sur le module réversible. Premièrement, selon Kolisoja (1997), le module réversible a une tendance à augmenter avec la masse volumique, puisque le nombre de contacts entre les particules augmente et la contrainte entre les grains et la déformation diminuent aussi. Deuxièmement, d’après Barksdale & Itani (1989) le module réversible augmente considérablement avec la masse volumique si l’échantillon est soumis à des faibles valeurs de contraintes. Donc, à des valeurs de contraintes élevées, l’effet de la masse volumique est moins important.
2.2.1.3.6 Effet de la méthode de compaction
Thompson & Robnett (1976) ont souligné les effets, identifiés par Seed et al. (1962), de la méthode de compaction du sol. Des échantillons préparés à une teneur en eau et à une masse volumique similaires et compactés par battage ont tendance à avoir un module réversible plus grand que ceux compactés de façon statique. La compaction par battage favorise la distribution et le réarrangement des particules, tandis que la compaction statique, privilégie l’agglomération des grains et un matériau ayant des propriétés réversibles plus faibles.
2.2.1.3.7 Effet de la teneur en eau
La teneur en eau est un paramètre étroitement lié au degré de compaction des sols; cette relation est donnée par la courbe de masse volumique sèche « d » en fonction de la teneur en eau « w ».
D’après la Figure 11, il est possible de faire une grande quantité de combinassions de w (Moisture Content) avec d (Dry Density) en fonction de l’énergie de compaction utilisée pour préparer
l’échantillon (Li & Seling, 1994). Ainsi, le sommet de chaque courbe correspond à la teneur en eau optimale (wopt) et à la masse volumique sèche maximale (dmax).
Figure 11. d en fonction de w et l'énergie de compaction. Tirée de Li & Seling (1994)
Pour les courbes de compaction montrées à la figure précédente, il est possible d’établir un côté humide et un côté sec par rapport à la teneur en eau optimale. Ainsi, le premier est associé à des valeurs dont w < wopt, tandis que le deuxième est donné par les valeurs dont w > wopt. À noter que, à
une énergie de compaction constante, un point donné par la paire (w,d) située du côté sec de la
courbe de compaction, une diminution de w implique la conséquente diminution de d. Par contre, du
côté sec, la diminution de w vient accompagnée d’une valeur plus élevée de d. Par ailleurs, les
valeurs correspondant au sommet de la courbe (wopt,dmax) pour une énergie de compaction donnée,
sont les valeurs de référence (reference points) utilisées en géotechnique.
La relation entre le MR et les deux paramètres antérieurs (w et d) est représentée par la Figure 12.
Cette figure indique que, par exemple, pour de faibles valeurs de teneur en eau, la diminution de d,
suivie d’une diminution de w, peut provoquer une légère diminution du MR parce que les effets des
Figure 12. Influence de w et d sur le module réversible. Tirée de Seed et al. (1962)
Des essais effectués sur des échantillons compactés de sols d’infrastructure (Khoury & Khoury, 2009) ont montré l’existence d’un comportement hystérétique de la relation entre le module réversible et la teneur en eau. La Figure 13 présente l’allure typique de la relation entre la teneur en eau (moisture Content) et le module réversible (Resilient modulus). Dans cette figure, le point de la courbe initiale de séchage (Starting Point of IDC) de l’échantillon correspond à l’état initial d’un échantillon préparé à la teneur en eau optimale et à la masse volumique sèche maximale (wopt et
dmax). La teneur en eau de l’échantillon diminue ensuite jusqu’au point initial de la courbe principale
de mouillage (Ending Point of MDC). Subséquemment, l’échantillon est mouillé pour augmenter graduellement sa teneur en eau jusqu’au point initial de la courbe principale de séchage (Starting Point of MDC). Finalement, l’échantillon est encore soumis au séchage jusqu’au point final de la courbe principale de séchage (Ending Point of MDC). À cet égard, pour une valeur donnée de la contrainte et de la teneur en eau, le module réversible est plus grand lorsque la valeur de teneur en eau est obtenue par séchage que lorsqu’elle est obtenue par mouillage de l’échantillon compacté.
Figure 13. Comportement hystérétique du module réversible. Tirée de Khoury & Khoury (2009)
2.2.1.3.8 Effet de la succion matricielle
En ce qui concerne les sols non saturés, il a été constaté qu’il y a une interaction entre la pression de l’air « ua » et la pression de l’eau dans les pores « uw » et ce, à l’intérieur même des interstices. La
différence entre les deux, (ua – uw), est la succion matricielle. La relation entre la succion matricielle
et la teneur en eau volumétrique w est un facteur important pour la caractérisation du
comportement des sols non saturés (Fredlund & Rahardjo, 1993). Cette relation est donnée par la Courbe de Rétention d’Eau (CRE).
L’allure de la CRE est hystérétique par rapport aux effets de mouillage ou de séchage auxquels est soumis l’échantillon (Fredlund, 1995). La Figure 14 montre une courbe CRE typique pour un sol argileux soumis au mouillage (Adsorption curve) et au séchage (Desorption curve). Les principaux éléments à tirer du graphique sont :
la pression d’air d’entrée (Air-entry value), laquelle correspond à la valeur de la succion matricielle requise pour que l’air commence à entrer dans les plus gros pores de l’échantillon;
la teneur en eau résiduelle (Residual water content), qui correspond à la teneur en eau pour laquelle il faut appliquer des valeurs très élevées de succion pour extraire de l’eau de l’échantillon (1000 kPa par exemple).
la teneur en air résiduelle (Residual air content), qui indique la présence d’air occlus dans les pores après le remouillage de l’échantillon de sol.
.
Figure 14. Courbe de Rétention d'Eau (CRE) typique d'un sol argileux. Tirée de Fredlund (1995)
Selon Fredlund & Morgenstern (1977), l’état des contraintes d’un sol saturé est fonction des paramètres qui définissent les contraintes effectives. La contrainte effective « ’ », ou contrainte intergranulaire, est la différence entre la contrainte « » et la pression interstitielle « uw » si la
pression d’air est zéro (ua = 0 kPa, correspondant à la référence atmospérique). Autrement dit,
c’est-à-dire que les interstices sont pleins d’eau. Fredlund & Morgenstern ont montré aussi que, dans les sols non saturés, la succion matricielle (m
=
ua – uw) est un paramètre qui permet aussi deFigure 15. État de contraintes d'un sol non saturé. Tireé de Fredlund & Morgenstern (1977)
L’incorporation de la succion matricielle dans l’état de contraintes a amené à évaluer son effet dans le comportement du module réversible « MR ». Selon Yang, et al. (2005), dans les sols cohésifs à
basse teneur en eau, le comportement du MR est contrôlé principalement par la succion matricielle
« m ». Ainsi, lorsque la teneur en eau est proche de la saturation, l’effet de la contrainte
déviatorique « d » devient plus important que celui de la succion matricielle. Ils proposent de
calculer le module réversible en fonction des paramètres indiqués ci-dessus à l’aide l’équation suivante :
𝑀𝑅 = 𝑘5 𝜎𝑑+ 𝜒𝜓𝑚 𝑘6
Équation 14. MR en fonction de la succion matricielle
Les paramètres k5 et k6 sont des constantes de régression et est un facteur entre 0 (sol sec) et 1
(sol saturé) utilisé pour considérer la contribution de la succion matricielle dans la valeur de la contrainte effective. Pour les sols cohésifs testés, ce modèle mathématique a donné des coefficients de détermination (R2) entre 0,75 et 0,91.
2.2.1.3.9 Effet du degré de saturation
Le degré de saturation « S » est un paramètre qui peut être utilisé pour analyser les effets de l’eau dans le comportement mécanique des sols. Celui-ci met en relation la teneur en eau « w » et la masse volumique sèche « d », ce qui implique que le degré de saturation permet de tenir compte
des changements de volume du sol par rapport à d (NCHRP, 2004d). Le degré de saturation peut
être calculé comme suit :
𝑆 =𝐺 𝑤
𝑠∙ 𝜌𝑤
𝜌𝑑 − 1
Équation 15. Degré de saturation
Le produit Gsw représente la masse volumique des grains solides (s); où Gs est la densité relative
du sol et w est la masse volumique de l’eau.
2.2.1.3.10 Effet de la température
L’effet de la température est un facteur à considérer surtout dans les pays froids où les sols gélifs sont soumis aux cycles de gel-dégel. Les recherches de Lee et al. (1993) ont conclu qu’un ou deux cycles de gel-dégel suffisent pour diminuer considérablement le MR des sols cohésifs. De plus, elles
indiquent ainsi que le MR des sols cohésifs gelés est indépendant de la contrainte déviatorique, mais
qu’il est également fonction de la température du sol.
La température du sol détermine aussi la quantité d’eau interstitielle qui gèle dans le sol lorsque celui-ci est soumis aux températures inférieures à 0°C. La partie de l’eau qui gèle fait en quelques sortes partie de la phase solide du sol (teneur en eau gelée), ce qui provoque une forte diminution de la teneur en eau qui reste liquide (teneur en eau non gelée). Les sols fins sont plus susceptibles à avoir des teneurs en eau non gelée plus élevées que les sols granulaires lors de la congélation. En général, les problèmes les plus importants concernant la capacité portante des chaussées liées au dégel sont conséquence de l’augmentation de la teneur en eau résultant de la fonte de l’eau gelée dans les sols (Dysli, 1991) et de l’accumulation d’eau provenant de la fonte de la neige et la glace dans l’environnement de la chaussée.
Berg et al (1996) ont développé un modèle pour calculer le module réversible « MR » des sols gelés
en fonction de la teneur en eau non gelée gravimétrique « wu-g » estimé selon l’équation de Bigl &