Commande prédictive appliquée à une machine synchrone alimentée par un onduleur triphasé
Texte intégral
Figure



Documents relatifs
Together, these data indicate that the increase in epoxy fatty acid observed after the addition of linoleic acid to cultures of plants expressing the Δ12- epoxygenase is specific
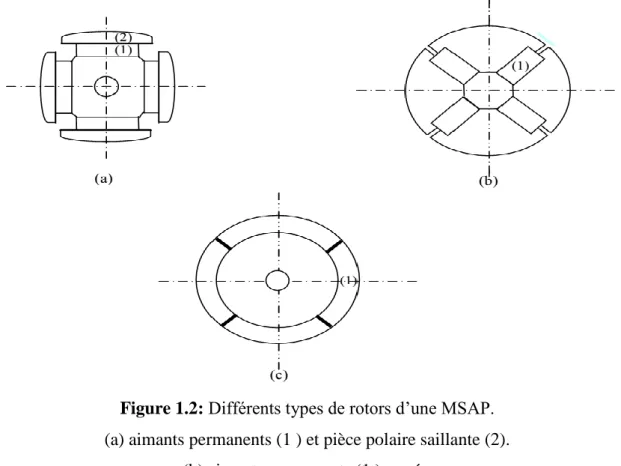
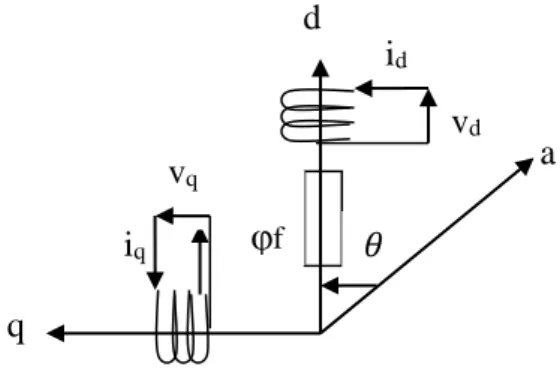
Introduction. 1) Moteur synchrone autopiloté alimenté en courant. 1) Modélisation du moteur: formulation des équations d'état d'un moteur alimenté en courant. 2)
Les trois enfants Mahdi, Jamyl et Inès sont ceux qui entretiennent le rapport de force qui sous-tend les différents champs de pouvoir au sein de la société.. Ce sont des
Face à cette lacune, le Cadre Européen Commun de Référence pour les Langues a été l’occasion d’une réflexion sur l’enseignement du japonais, notamment dans
Puis relier par un segment vert les points (dans l'ordre) A, B,C, D, HOME : c'est le chemin retour pour Miss Mell.. • Tracer la droite passant par A et parallèle
En déduire si cette phrase et correcte « Une personne sur deux à un forfait de 1,5 heures ou moins ».(1
Keywords : machine asynchrone à n phases, diagonalisation des matrices, espace Hermitien, espace Euclidien, concept multimachines, machine fictive monophasée, machine fictive
peuvent Atre consid4r4es comme les grandeurs de rAglage de ce convertisseur au mAme titre que les fonctions de conversion des tensions entre phases et un point milieu de la source
