Reservoir management using a network flow optimization model considering quadratic convex cost functions on arcs
15
0
0
Texte intégral
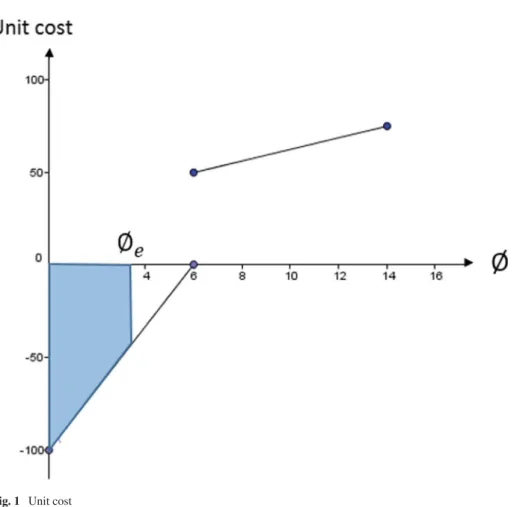
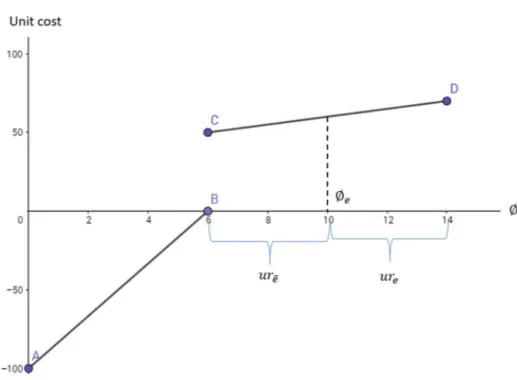
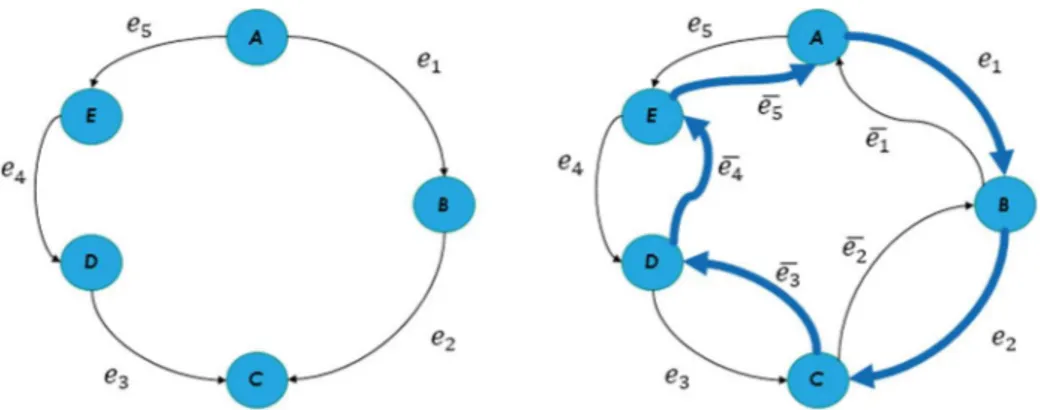
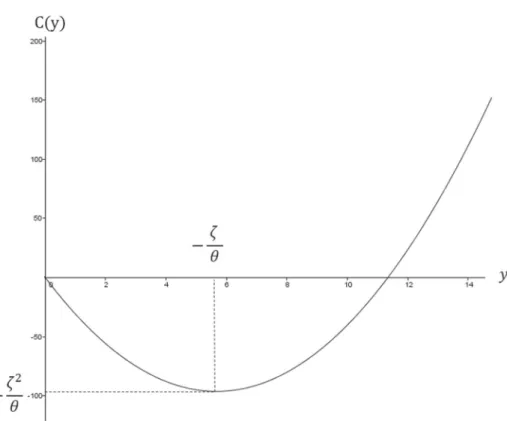
Figure
+4
Documents relatifs
