A General Manipulation Task Planner
Texte intégral
Figure
Documents relatifs
Mensural c1as.o;iriers individunte noun referents according to quantity; shape classifiers individuate noun referents according to tbe
située au point E peut monter ou descendre suivant l’axe Dz. Le poids de la potence est négligeable devant la charge. 1) Déterminez par une étude analytique les actions exercées par
Pour chacune des questions suivantes une ou plusieurs réponses proposées sont exactes Indiquer sur la copie le numéro de la question et la lettre de la réponse choisie.
Traduire ces deux relations en termes de distances et d’angles (penser à utiliser A et B).. Soit M un
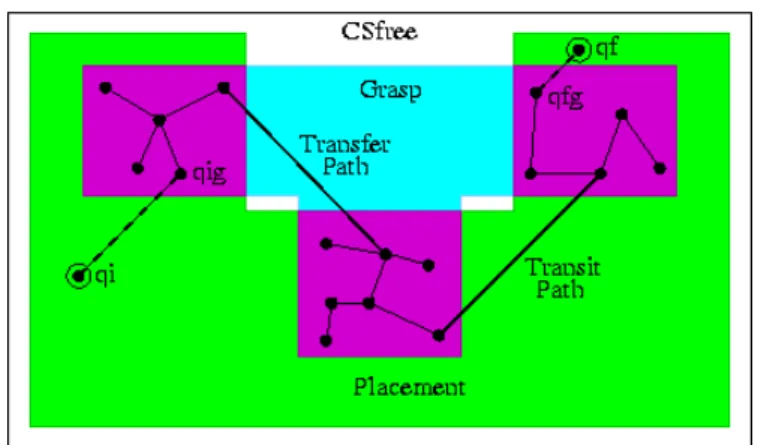
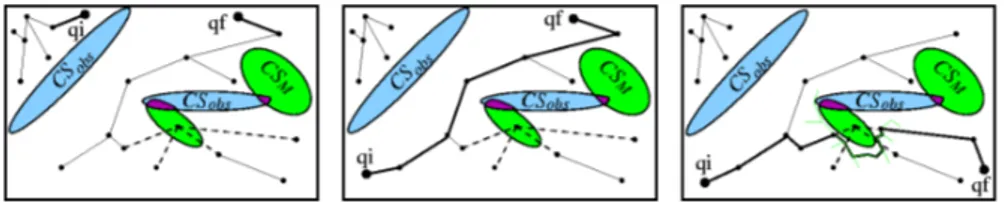
Figure 1: Framework of the proposed planner detection method in LiDAR point clouds using GPU-based RANSAC.. D den_changei = D deni+1 − D deni
Faculté des sciences de la nature et de la vie Liste des étudiants de la 1 ère année. Section
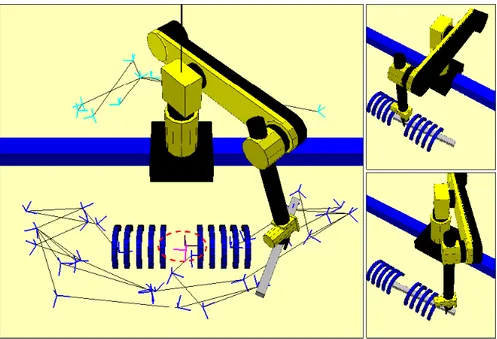
Figure 10: The set of candidate configurations during the resolution of the radio-switch problem For the sake of simplicity, we suppose that the planner does not choose a
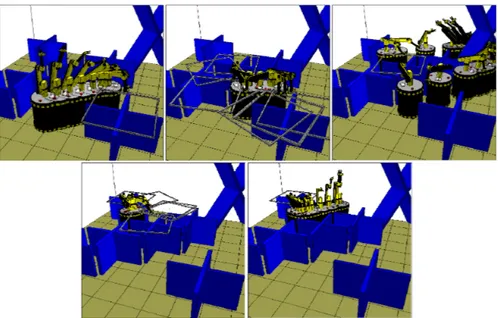
The reason of this different behavior is that, in the case of problem A, all the layers do not need to be explored for finding the solution path, whereas solving problem B requires
