L E S
C O L L O Q U E S
DE L'INSTITUT SUPÉRIEUR DES MATERIAUX
ET DE LA CONSTRUCTION MECANIQUE
COLLOQUE DU LUNDI 24 NOVEMBRE 1952
Géométrie des systèmes articulés
et thème général
sur les liaisons rotatives dans l'espace
(Suite et fin.)
Principe d'équivalence
dans la conception cinématique des machines
Cas particulier pratique.
Supposons (fig. 21) que les deux axes rotoïdes X' et Y' se trouvent choisis de manière que cha-cun d'eux rencontre son axe principal corres-pondant X ou Y auquel il est lié, et lui soit perpendiculaire.
Dès lors, le théorème dégage et traduit
rigou-reusement, d'une façon directe, ou par équiva-lences ou dégénérescences mathématiques, le schéma géométrique de tous les joints de trans-mission existants qui sont à couples d'emboîte-ment; et il en fournit la théorie générale et commune — laquelle, ainsi, se résume à une chose très simple.
Et voici, dans ce cas particulier, l'énoncé complet du théorème :
1° Deux axes rotatifs principaux et quel-conques dans l'espace peuvent toujours avoir une liaison réciproque, réelle et continue de rota-tion, et cela grâce à la combinaison appropriée de deux couples rotoïdes liés par un couple plan — l'axe de chacun des deux couples rotoïdes étant perpendiculaire à son axe principal cor-respondant, et concourant sur lui;
2° Si les deux axes principaux tourillonnent dans un espace-support indéformable (ce qui cor-respond à des paramètres fixes : m, n et h), le rapport p des vitesses angulaires instantanées entre les deux axes principaux a pour valeur :
p = COS"-ar£ + ™ t g s « +
lm ' n
mn
m
BEu effet : soient X et Y les deux axes princi-paux de rotation, et X' et Y' les axes des deux couples rotoïdes qui leur correspondent respec-tivement — X' étant normal à X et le rencon-trant en A, tandis que Y' est normal à Y et le rencontre en B.
L'espace-support ayant été supposé indéfor-mable, on voit ([lie l'axe rotoïde X' va balayer un plan perpendiculaire à X en A, alors que l'axe rotoïde Y' balaiera le plan perpendiculaire à Y en B. Et, bien entendu, l'intersection MN de ces deux plans étant obligatoirement réelle, la liaison rotative entre X et Y sera également réelle, puisque les rotations respectives autour de X et Y sont, à tout instant, définies p a r les positions des axes rotoïdes X' et Y' dont le point de rencontre balaie constamment la droite illimitée d'intersec-tion MN.
Soient h (perpendiculaire commune à X et Y), m et n les paramètres fixes correspondant à l'es-pace-support indéformable choisi.
On a : or : d'où : d'où : _cU p ~ (1 Ç, h+l = m t g et et l — n tg dl = m —i— . d a = n. —1 7-5-. d B cos- cl cos'- p det cos'1 cl n = — cos4 a d p m ' cos'- |3 m 1 + tg2 P mais : t g p = m tg a — h d'où, en remplaçant tg J3 il 0 = — . COS- a ' m i + m tg y.'— h L'est-à-dire : p = COS2 et - + — Lg- a ^ n , m , , . h- 21i . tg. x m n nui n Cas particuliers :
1" h o. Les axes sont concourants. D'où
P = cos-a m — + — tg a n
,
m . n2° h = o et m n 1. Les axes sont concourants, et il y a symétrie.
D'où p — I. Les vitesses angulaires autour de X et Y sont constamment égales. C'est
l'liomoci-nétisme.
Et l'on a ce même résultat si les deux axes X et Y sont parallèles (m et n ->oo,. et, étant équi-valents : — 1). Et les axes rotoïdes X' et Y'
n
sont, également, parallèles entre eux.
3° Indétermination. C'est le cas où il y a per-pendicularité entre l'un des axes p r i n c i p a u x (ou les deux) avec le plan des axes rotoïdes X'Y'. D'où m ou n = o.
Remarque. — Ce théorème général se r a m è n e au schéma géométrique représenté figure 22. Et, matérialisé sous forme d'un mécanisme (fig. 23), il se résume à la liaison de deux arbres au moyen de deux charnières liées p a r tenon et mortaise. Et dès lors, on voit que l'expression du théorème
F I E . 2 2 .
F I G . 2 3 .
par un tel mécanisme représente le joint de trans-mission le plus universel qui soit, puisque, outre la libre et variable inclinaison possible faite entre les deux axes principau x de rotation d u r a n t le mouvement, ces derniers peuvent avoir des dépla-cements relatifs de translation absolument arbi-traires.
Ce théorème général constitue, donc, la base géométrique essentielle pour établir ou analyser n'importe quel joint de transmission à couples d'emboîtement; et, tout particulièrement, pour concevoir des joints homocinétiques. Il suffira, pour obtenir ceux-ci, que la conjonction des deux couples rotoïdes liés par un couple plan corres-ponde à la disposition paramétrique indiquée plus haut et pour laquelle p = 1. Et dès lors, on voit combien se trouve clarifiée la conception de pa-reils mécanismes.
Certes, reprenan t une chaîne quelconque fer-mée à sept couples rotoïdes déformable au premier degré de liberté, on pourrait, aussi, raisonner de la manière suivante : deux axes rotoïdes voisins quelconques sont toujours assi-milables, respectivement, aux deux axes d'entrée et sortie d'un joint de transmission •— les cinq autres axes rotoïdes intermédiaires constituant, par la chaîne fractionnelle des six corps articulés qui s'échelonnent de l'axe d'entrée à l'axe de
sortie, la liaison rotative entre ceux-ci; et alors que le septième corps de la chaîne fermée repré-sente le bâti de référence d'un tel système.
Mais l'intérêt essentiel du présent théorème général est de montrer que la liaison rotative de deux axes dans l'espace — réalisable, sans doute, p a r un système gauche et complexe de cinq couples rotoïdes (comme le rappellent les lignes
immédiatement ci-dessus) — peut, toujours, être réalisée p a r un système plan de deux couples rotoïdes seulement.
Et, en fait — je l'ai déjà signalé — tous les joints existants sont régis par ledit théorème.
Pour le prouver, l'exposition de quelques exemples suffira — toutes fes autres énumérations possibles conduisant aux mêmes résultats dé-monstratifs.
Voici donc (fig. 24), le joint Tracta. On cons-tate que les deux axes X' et Y' sont liés p a r un couple plan P — comme prévu.
Dans le cas particulier où la constitution du bâti impose le maintien constant d'un plan de symétrie (plan bissecteur) pour toutes les incli-naisons entre X et Y, le joint est (et demeure) homocinétique (p = 1). C'est ce que donnent les montages d'utilisation.
La figure 25 représente un joint homocinétique que j'imaginai naguère, et dont l'application est faite en artillerie navale. On y retrouve, évidem-ment, les deux axes X' et Y' liés par couple plan P. Mais, on notera que l'articulation sphé-rique entre les arbres X et Y d'entrée et sortie n'a pour but que de maintenir, constamment, la symétrie (p = 1), c'est-à-dire l'homocinétisme; et, ne constitue pas un couple sphérique faisant partie intégrante (au sens mathématique) de la chaîne cinématique du joint. Théoriquement, sa présence est inutile (géométriquement parlant), et ne fait que se superposer, impérativement, à l'action concourante des deux couples rotoïdes d'axes X et Y, en accord avec l'espace-support ou bâti.
Et il en est de même quant au couple de glis-sement existant entre le plateau P et la butée sphéro-cylindrique de centre S (dont l'objectif est de faire que l'ensemble reste cohérent, puisque, grâce à cette réalisation, les pièces cons-titutives ne peuvent s'échapper et voler en éclats). Ces deux derniers couples (sphérique et prisma-tique) sont, précisément, des exemples prototy-piques de couples surabondants.
Je signale aussi (fig. 26) un joint que j'ai pro-posé sous la dénomination : « Généralisation du joint de Koenigs » (un petit modèle démonstratif en a été construit), et clans lequel les deux baril-lets à axes concourants X et Y portent, d'une
ma-nière symétrique et dans les logements appro-priés, des pistons dont les axes respectifs X' et Y' sont, cette fois, obliques (gauches ou concou-rants — et tandis que, dans le joint de Koenigs, il y a parallélisme) par rapport à l'axe du barillet correspondant — une articulation rotoïde Z étant, alors, prévue entre chacun des deux pistons (ou compas) dont les n exemplaires constituent, en parallèle, les intermédiaires de transmission. (Une seule paire de pistons formant compas est repré-sentée sur le dessin.)
On voit que, par équivalence, chaque compas articulé (dont chaque branche glisse, en tournant, dans son barillet de réception) correspond, au total, à la matérialisation des deux couples ro-toïdes liés par un couple-plan.
Encore par équivalences, mais sous une autre forme, on tirera des conclusions analogues à pro-pos du joint de Hoocke, en fonction du théorème général.
Et celui-ci reste certes applicable ou, si l'on veut, son expression demeure vraie lorsqu'on en arrive aux limites, c'est-à-dire aux dégénérescences ma-thématiques.
Soit (fig. 27) le schéma géométrique du théo-rème dans le cas où h = o (donc, les deux axes principaux étant concourants), avec m et n — o.
Fie. 27.
Dans cette hypothèse, on peut avoir m = n. Ce qui donne, on l'a vu, p = 1 — donc, l'homociné-tisme. Et si, au contraire, m # n, il n'y a pas, et ne peut pas y avoir liomocinétisme ( p # 1).
Mais, supposons, maintenant, que les deux points A. et B viennent se confondre en S, c'est-à-dire, qu'on ait, simultanément, h = o, m = o,
n = o. On voit, d'après sa formule, que p prend, dès lors, une valeur indéterminée. Et, géométri-quement, cela se comprend très bien. En effet, ies deux axes rotoïdes X' et Y' étant, théoriquement, liés p a r couple plan, et se trouvant désormais assujettis à passer par le point commun S, tout s'exerce comme s'ils étaient liés, entre eux, par une simple articulation rotoïde passant par S et d'orientation quelconque. Autrement dit, on abou-tit, ainsi, à l'équivalent d'un système comprenant cinq couples rotoïdes concourants — système qui n'est autre, évidemment, qu'une chaîne fermée, déformable au second degré de liberté.
Si l'on désire supprimer l'indétermination, il faut donc ajouter au système une contrainte com-plémentaire, se traduisant par l'enlèvement d'un degré de liberté. Pour cela, on peut, p a r exemple, supprimer toute articulation possible entre les deux articulations rotoïdes X' et Y' en faisant qu'elles appartiennent à un même ensemble ri-gide. Il en résulte, de cette manière, une valeur constante pour l'angle existant entre les deux axes X' et Y' (valeur constante qui peut être égale à 90°, ou non). Autrement dit, on accède, finale-ment, et sous cette forme limite, au joint de Car-dan (angle tétraèdre déformable). Et l'on retrouve, ainsi, pour ce joint, l'incapacité absolue d'homo-cinétisme — puisque, à son propos, est irréali-sable la symétrie stipulée p a r le théorème au sujet de l'homocinétisme.
Mais si, considérant le centre commun du joint de Cardan (en lequel se coupent les quatre axes rotoïdes de la chaîne fermée qu'il constitue), on envisage, par une seconde dégénérescence ma-thématique, ce point rejeté à l'infini, on arrive à une nouvelle limite qui est le joint de Oldham. En effet, les deux axes X et Y d'entrée et sortie de ce joint étant parallèles se rejoignent à l'in-fini; et leurs deux axes X' et Y' d'articulations ro-toïdes, qui leur sont orthogonaux, se situent,
eux-mêmes, à l'infini puisque ces dernières arti-culations rotoïdes sont, en fait, des couples de glissement. Et, ainsi, réapparaît l'homocinétisme, attendu que ~ 1 (car ces deux paramètres, du même ordre de grandeur, sont équivalents dans leurs croissances infinies). Evidemment, la géo-métrie élémentaire montre aussi, directement et instantanément, l'homocinétisme du joint de Oldham.
Mais j'en reviens aux systèmes homocentriques
précédents à cinq couples rotoïdes concourants
(h = o, m = o, n = o) — donc, indéterminés —
et pour lesquels il s'agit de lever, éventuellement, l'indétermination. On a vu, à l'instant, et dans ce but, la solution qui conduit au joint de Cardan, et consistant à solidariser deux axes entre eux (donc, supprimer u n e des cinq articulations). Mais on peut, aussi, conserver ces cinq articulations, et soumettre, p a r exemple, l'axe rotoïde de liaison entre X' et Y' à une certaine obligation géomé-trique — par exemple, contraindre cet axe à ba-layer le plan bissecteur des axes X et Y. Il en ré-sulte, dans ce cas, l'homocinétisme pour le sys-tème.
Divers joints homocentriques (genre Parvillé, Villard et autres) sont conçus dans cet esprit.
VI. — ENGRENAGES D'ANGLES A COUPLES D'EMBOITEMENT
En application du théorème général, j'ai ima-giné et fait construire deux mécanismes assimi-lables à des engrenages d'angle dont les dentures seraient mobiles, avec contacts p a r surfaces planes — le rapport des vitesses étant égal à l'unité.
Je n'en donnerai pas le détail ici, mais signale-rai que, dans le premier mécanisme (voir Génie
civil du 15 septembre 1934), les deux arbres
d'en-trée et de sortie (qui sont concourants et perpen-diculaires entre eux) se trouvent constamment, en liaison rotation par l'action périodique de n groupes de deux couples rotoïdes liés, chacun et périodiquement, au moyen d'un couple plan.
Durant le mouvement, et successivement pen-dant la rotation continue, chaque groupe de deux couples rotoïdes est momentanément en conjonc-tion de travail grâce à la présence réactive de son couple plan correspondant; puis, hors d'action (effacement du couple plan), et ainsi de suite... Il y a continuité de transmission, tandis que les tenons et mortaises, à orientations variables
conve-nablement conjuguées, et qui matérialisent les couples plans, forment les dentures mobiles et planes d'un véritable engrenage.
Dans le second mécanisme — qui a fait l'objet d'une note présentée, de ma part, par M. J. Pérès à l'Académie des sciences (compte r e n d u du 29 no-vembre 1943) — les deux axes d'entrée et sortie sont, encore, concourants; mais, alors, possèdent le sérieux avantage de pouvoir présenter, entre eux, un angle variable pendant le mouvement
même. Et cette fois, chaque axe rotoïde (des n paires de couples rotoïdes liés par couples plans) est parallèle à l'axe d'entrée ou sortie auquel il se trouve afférent (alors que, dans le mécanisme pré-cédent, il y avait perpendicularité, et non paral-lélisme, au sujet de ces mêmes axes).
Ce deuxième mécanisme joue donc le rôle d'un engrenage d'angle qui serait à inclinaisons va-riables possibles entre les arbres durant la trans-mission, et r a p p o r t des vitesses angulaires cons-tamment égal à un. Et, à la limite, les deux arbres pourraient être parallèles — leur obliquité étant ainsi (entre 0° et 180°) susceptible de p r e n d r e toutes les valeurs imaginables.
Comme pour le premier mécanisme, la conjonc-tion rotative résultante s'exerce en toute conti-nuité grâce à l'effet périodique et successif donné par chacune des n paires de couples rotoïdes dont chaque couple plan de liaison correspondant est, d'une manière cyclique et répétée, à présence réactive, puis à effacement complet. Les contacts de propulsion entre surfaces planes bénéficient, là comme précédemment, du mouvement lou-voyant.
VII. — A P P L I C A T I O N S D U J O I N T D E C A R D A N
Dans le mémoire (Bulletin S.M.F.) précédem-ment évoqué, j'exposai (mais ne vais pas la repro-duire ici) une théorie générale de la chaîne fer-mée à quatre couples rotoïdes concourants, dite : angle tétraèdre déformable.
Le joint de Cardan classique n'en est, évidem-ment, qu'un cas particulier simple : celui où les trois angles a, b et c sont égaux à " (fig. 28). Et son analyse, bien connue, est facile.
Fie. 28.
Je rappelle qu'on a recours pour cela (fig. 29) à la sphère sur laquelle se promènent les 2 points
A et B — ceux-ci balayant, chacun, une circon-férence, et les 2 plans des circonférences ba-layées faisant entre eux l'angle y; tandis que l'arc AB est, p a r construction, de longueur inva-riable. (Afin de simplifier les figures, je ne re-présenterai les cardans que sous leur forme géométrique, c'est-à-dire par croix et demi-fourches.)
Il suffit donc de considérer le trièdre variable de sommet 0, et d'arêtes OY, OA', OB' dans lequel l'angle a (Cpù définit les rotations de l'axe I)
en-traîne les variations de l'angle (i (qui définit les rotations de l'axe II), et inversement.
La formule élémentaire de trigonométrie sphé-rique appliquée à ce trièdre permet donc d'écrire :
Fie. 29.
(1) cos A'OB' = cos a cos ?> + sin a sin P cos y (les angles A'OB' et y étant constants).
P a r conséquent, après différentiation de (1), on obtient, commodément, le rapport p =
<0,
— — entre les vitesses angulaires w 1 et «s des
2
deux arbres I et II. Cette variation est Apério-dique par tour. Et l'on sait que p varie entre : cos ' et cos Y •
Si la vitesse angulaire «i d'un des arbres est constante, fes variations de sont représentées par îe tracé figure 30. (Au cas où 7 tendrait vers H 11 3 11
2", les droites d'abeisses ^ et h> deviendraient,
évidemment, des asymptotes.) A w
1
n. x 2g ^ Fie. 30.Bien entendu, la loi est réciproque.
Tout cela m'a conduit à envisager le méca-nisme suivant : considérons (fig. 31) un arbre
Fie. 31.
Les 2 rotors, d'axe géométrique commun (celui des arbres c et cl), et imbriqués l'un dans l'autre, ont donc une rotation d'ensemble en parallèle, mais se courent après, sous forme rotative, et d'une manière différentielle, en ce sens que deux fois p a r tour complet de l'arbre moteur e, ils se dépassent alternativement, et angulaire-ment, établissant ainsi, entre leurs faces radiales opposées, 4 espaces à volumes variables, égaux deux à deux, et compris entre zéro et un maximum.
On imagine donc très bien une distribution assurée par la rotation même des rotors (fe-nêtres AA' d'aspiration et RR' de refoulement). Mais, l'intérêt majeur, à ce sujet, réside dans le fait que la double pulsation par tour conduit à disposer, de façon diamétralement opposée, les orifices de distribution appartenan t au stator. D'où, un équilibrage radial mathématique quant aux poussées dues au refoulement du fluide.
Un tel bénéfice serait absolument impossible en utilisant des systèmes à unique pulsation par tour — tels les mécanismes de Withworth.
REMARQUE. — A propos des applications du
joint de Cardan, dont l'une d'elles se nomme le joint de Hoocke, je veux attirer l'attention sur un détail concernant ce dernier mécanisme.
On sait (la figure 30 l'a rappelé) que si l'arbre d'entrée I d'un cardan tourne à la vitesse angu-laire <*>i constante, l'arbre de sortie II reçoit une vitesse variable suivant la loi bipériodique mentionnée plus haut, et réciproquement.
Donc (fig. 36), si l'on considère l'arbre II comme étant, à son tour, l'arbre d'entrée d'un second carda n qui aurait p a r r a p p o r t à cet arbre une disposition identique à celle du pre-mier cardan, l'arbre de sortie I' de se second cardan (commandé par l'arbre II) r e p r e n d r a i t donc, exactement, la vitesse angulaire et cons-tante ">i de l'arbre I. C'est ce que réalise le joint de Hoocke (fig. 36).
«s et u ' j (fig. 32) en fonction de la vitesse
angu-laire w, de l'arbre I. Les deux arbres de sortie II et II' vont donc tourner dans le même sens, mais avec des vitesses périodiquement variables, et atteignant (suivant les mêmes lois de périodicité), deux fois par tour, et alternativement, les mêmes maxima et minima — chacune étant donc crois-sante lorsque l'autre est décroiscrois-sante, et selon une relativité faisant que, constamment, et d'une ma-nière synchrone, l'une dépasse l'autre, puis se trouve dépassée p a r elle.
C'est sur ce p r i n c i p e que j'ai fondé l'étude d'un compresseur centrifugeo-volumétrique réalisé de la façon suivante (fig. 33, 34 et 35) : chacun des deux arbres de sortie c et cl entraîne un rotor correspondant formé de 2 palettes (les palettes
a, a' pour il, et b, h' pour c), et tournant dans un
stator k.
d'entrée d'axe I lié, par un premier cardan, à l'arbre de sortie IL Puis, un second cardan, liant le même arbre d'entrée I à un second arbre de sortie II' (centré sur II et réalisé sous forme iu-bulaire). Dès lors, on comprend que si, p a r rap-port au premier cardan, le deuxième se trouve monté de manière à présenter, immuablement, par construction, un décalage angulaire relatif de -g , les deux arbres de sortie II et II' pren-dront, respectivement, des vitesses angulaires *
Il y a liomocinétisme parce que le premier et le second cardan sont, par r a p p o rt à l'arbre in-termédiaire, dans des dispositions semblables. Et à son sujet, en conclusion, on dit, habituelle-ment, que l'homocinétisme nécessite la symétrie
-— les 2 axes I et F pouvant être concourants ou parallèles.
C'est exact, et suffisant en pratique. Mais il faut voir la chose d'une façon plus intégrale, et com-p r e n d r e que rhomocinétisme est com-possible non com-pas
seulement pour ces deux positions de symétrie plane (c'est-à-dire les deux axes I et 1' étant concourants ou parallèles); mais, aussi, pour une infinité d'autres positions — les deux axes I et I' étant alors gauches dans l'espace.
En effet : partant d'une des deux positions de symétrie plane (donc de l'homocinétisme), on peut toujours imaginer que l'on coupe l'arbre II en deux tronçons. Puis — ceux-ci restant cen-trés sur un même axe géométrique — que, par exemple, l'on fasse pivoter autour de cet axe, et d'un angle relatif quelconque, le tronçon affé-rent au second cardan. Et qu'enfin on resoude les deux tronçons pour les rendre à nouveau
« monobloc ».
Dans ces conditions, 011 conçoit,
innnédiate-FK;. 36.
XXIX Fie. 35.
Plusieurs fois, au cours de ce qui précède, on a vu, entre les couples d'emboîtement, des exemples d'équivalences — lesquelles s'ex-pliquent parfaitement, du point de vue mathé-matique, par le fait du nombre comparatif des degrés de liberté. C'est ainsi, je le redis, que trois couples rotoïdes d'axes parallèles donnent un ensemble équivalent à un couple plan orienté perpendiculairement à la direction des trois axes parallèles.
Et, pareillement, la conjonction de trois cou-ples rotoïdes d'axes concourants en un même point équivaut à un couple sphérique ayant pour centre le point commun de rencontre.
Dans cet esprit, le joint suggéré par la figure 36 bis est une illustration relative au couple
plan (défini p a r le théorème général), puisque, là, ce couple plan P se trouve remplacé par trois couples rotoïdes Ri, R«, R3 qui lui seraient
per-pendiculaires.
J'ai fait réaliser un modèle démonstratif concer-nant aussi ce mécanisme (lequel ne peut, certes, avoir d'intérêt pratique vu son manque de rigi-dité).
Mais voyons, encore, un autre exemple. Il est facile de remarquer que, si deux plateaux parallèles Pi et P=, d'axes Oi et On, tournent
cha-cun autour de son axe respectif et à la même vi-tesse + to, n'importe quel point Mi de Px laisse
sur P» (et inversement) une trace qui est une cir-conférence de centre M» et de rayon MjVL égal à l'excentricité Ô1O0 — cette circonférence étant décrite, par Mi, à la vitesse relative — w.
Je me servis, naguère, de cette propriété, pour l'établissement d'une pompe à débit sans pulsa-tions (construite par les «Pompes Guinard») .
ment, que le joint demeurera homocinétique — l'axe de l'arbre I' se situant sur un cône ayant Y pour demi-angle au sommet, et dont l'axe géo-métrique est celui de II.
Les deux positions classiques de symétrie pour l'arbre I' donnant l'homocinétisme sont donc simplement les deux positions particulières où les génératrices du cône en question se trouvent placées dans le plan de I et II.
AUTRE EXEMPLE D'ÉQUIVALENCE ENTRE DES COUPLES D'EMBOITEMENT
Puis, plus récemment, je repris la question en la développant, et en la généralisant sous le vo-cable « théorème des cercles tournants ». Et j'arrivai, ainsi, à une nouvelle liaison cinéma-tique à propriétés projectives utilisables dans la conception des moteurs à barillets, sans bielles, ni vilebrequin — ce travail cinématique ayant fait i'objet d'une note que M. le professeur Pérès a bien voulu déposer à l'Académie des sciences (compte rendu du 10 juillet 1949).
Or, je ne vais pas exposer ce nouveau
pro-Fig. 37.
blême présentement, mais veux simplement en-visager, d'une façon brève, la combinaison élé-mentaire rappelée en premier lieu ci-dessus (fig. 37), à propos des deux plateaux tournants Pi et P2, afin d'en tirer certains enseignements.
Voici l'idée :
On conçoit que si le point M* représente (fig. 38) f'axe projeté d'un doigt cylindrique de
Fie;. 36 bis.
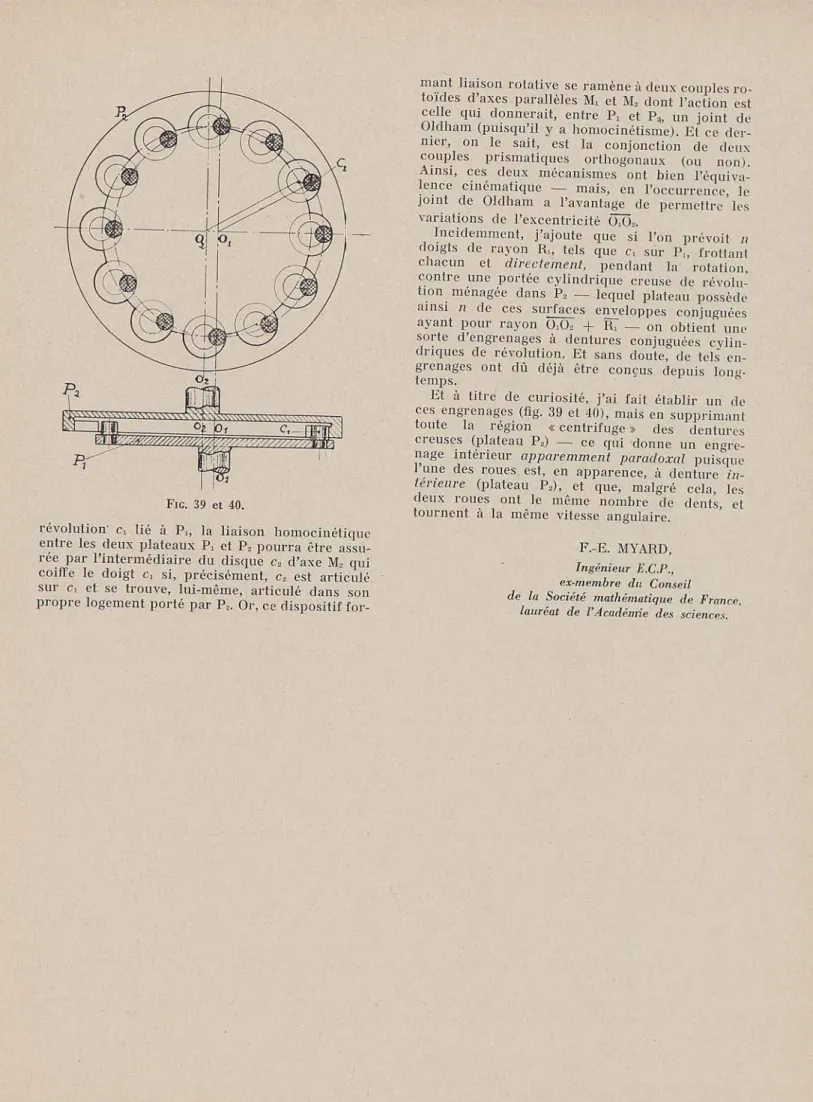
FIG. 39 et 40.
révolution c1 lié à Pi, la liaison homocinétique
entre les deux plateaux Pj et P2 p o u r ra être
assu-rée p a r l'intermédiaire du disque c2 d'axe M» qui
coiffe le doigt cx si, précisément, c2 est articulé
sur c, et se trouve, lui-même, articulé dans son p r o p r e logement porté par P2. Or, ce dispositif
for-mant liaison rotative se ramène à deux couples ro-toides d'axes parallèles Mx et M2 dont l'action est
celle qui donnerait, entre P, et P„ un joint de Oidham (puisqu'il y a homocinétisme). Et ce der-nier, on le sait, est la conjonction de deux couples prismatiques orthogonaux (ou non). Ainsi, ces deux mécanismes ont bien l'équiva-lence cinématique — mais, en l'occurrence, le joint de Oldham a l'avantage de permettre les variations de l'excentricité tÂÔ.,.
Incidemment, j'ajoute que si l'on prévoit /; doigts de rayon R„ tels que C l sur P„ frottant
chacun et directement, pendant la rotation contre une portée cylindrique creuse de révolu-tion ménagée dans P» _ lequel plateau possède ainsi n de ces surfaces enveloppes conjuguées ayant pour rayon O ^ + Rt — on obtient une
sorte d'engrenages à dentures conjuguées cylin-driques de révolution. Et sans doute, de tels en-grenages ont dû déjà être concus depuis
long-temps. *
Et à titre de curiosité, j'ai fait établir un de ces engrenages (fig. 39 et 40), mais en supprimant toute la région « centrifuge » des dentures creuses (plateau P2) — ce qui donne un
engre-nage intérieur apparemment paradoxal puisque l u n e des roues est, en apparence, à denture
in-térieure (plateau P2), et que, malgré cela, les
deux roues ont le même nombre de dents, et tournent à la même vitesse angulaire.
F.-E. MYARD,
Ingénieur E.C.P., ex-membre du Conseil
de la Société mathématique de France, lauréat de l'Académie des sciences.