T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par l'Université Toulouse III - Paul Sabatier Discipline ou spécialité :
Sciences et Techniques des Activités Physiques et Sportives
JURY
Pr. Pier-Giorgio Zanone, Professeur (Université Toulouse III) Président Pr. Laurence Chèze, Professeur (Université Lyon I) Rapporteur Pr. Jean Paul Micallef, Professeur (Université Montpellier I) Rapporteur
Pr. Serge Le Bozec, Professeur (Université Paris-sud XI) Examinateur Pr. Pierre Portero, professeur (Université Paris-sud XI) Examinateur Pr. Manh Cuong Do, Professeur (Université Paris-sud XI) Directeur de Thèse
M. Bruno Watier, MCU (Université Toulouse III) Co-Directeur de Thèse
Ecole doctorale : CLESCO Unité de recherche : LAPMA - EA3691 Directeur(s) de Thèse : Manh Cuong DO
Bruno WATIER Présentée et soutenue par Eric POIRIER
Le 08/09/09 Titre :
Influence de paramètres biomécaniques et électrophysiologiques sur la technique de propulsion:
Résumé :
L’objectif de ce travail est de tenter d’identifier les facteurs qui sous-tendent les adaptations posturales lors de la propulsion du cycliste et notamment lors du passage de la posture classique vers la posture danseuse. Cette adaptation posturale est-elle liée à une recherche de création de forces supplémentaires et/ou permet-elle une économie musculaire? Pour aborder ce questionnement, il a été développé du matériel expérimental permettant de mesurer les contraintes mécaniques à l’interface entre le cycliste et la bicyclette. Ce matériel nous a permis d’enregistrer et d’analyser les paramètres mécaniques (moments articulaires et puissance) et physiologiques (EMG, rythme cardiaque) de chacune des postures lors de tests où la puissance mécanique est incrémentée.
Les résultats montrent que l’utilisation de la posture danseuse crée des configurations musculo-squelettiques plus adaptées au développement de puissances qu’en posture classique. L’élévation de la puissance développée est liée à l’augmentation de la contrainte musculaire. Cette augmentation de contrainte invalide l’hypothèse d’économie musculaire à l’origine du choix postural. L’analyse de l’activité électromyographique montre une répartition différente des efforts entre les groupes musculaires en danseuse. Le biceps femoris (acteur essentiel de la propulsion) voit son activité diminuer en durée d’activation et en intensité de ses contractions ce qui augmente sa phase de repos. Cependant, l’amplitude de l’EMG de la majorité des muscles étudiés a augmenté. Face à l’augmentation de la résistance à l’avancement de la bicyclette, les adaptations mécaniques réalisables en posture classique sont contraintes par la présence de l’appui sur la selle. La transition vers la posture danseuse permet une nouvelle organisation des leviers anatomiques ce qui entraîne une économie musculaire locale (biceps femoris). Cette nouvelle répartition de l’effort entre les différents muscles expliquerait la transition de la posture classique vers la posture danseuse.
Transition from the classical posture to the upright posture during cycling.
Biomechanical criterion effects on the cyclist propulsion technique.
Abstract:
The aim of this study was to understand which elements induce postural adaptation during cycling propulsion and particularly during transition from the classical posture to the upright one. Lots of works investigate posture effect on cyclist performance. However, few studies interest in the upright posture utilization. In our knowledge, no studies clearly explain why cyclists change their posture from classical to upright when ergocycle’s resistance becomes too high. Is this postural adaptation due to more force creation and/or to muscular economy? First, we have developed experimental devices allowing us to measure mechanical strain between cyclist and bicycle. We have studied mechanical and physiological parameters for each posture during power incremental test. Then, we have evaluated the more pertinent parameters influence on the transition trigger. Results show that upright posture allows musculoskeletal configuration favorable to the development of high power output. Using upright posture, absence of saddle support induces better postural adaptations to oppose to the ergocycle resistance increase. Power output growth is principally due to muscle strain increase. Electromyographic analysis shows that muscle activation is different between the two postures. In particular, biceps femoris is less activated in the upright posture in spite of the higher power output. The reduction of the duration and intensity of this muscle contraction permit to increase the rest phase. Better allocations of the effort between the muscles enable some of them to rest. This phenomenon of muscle economy could explain the transition from classical posture to the upright posture when power output get higher.
POIRIER Eric
Laboratoire Adaptation Perceptivo Motrice Apprentissage
EA3691
Université Paul Sabatier 118 route de Narbonne 31062 Toulouse cedex 4
Remerciements
Je tiens tout d’abord à remercier manh cuong Do pour m’avoir dirigé tout au long de ma thèse. Je tiens particulièrement à remercier mon co‐directeur Bruno Watier qui me suit depuis la maitrise et dont l’appui a été essentiel durant toutes ces années.
Je remercie tous les membres du laboratoire pour leur aide et en particulier la secrétaire, Michelle Fourment pour sa gentillesse et le directeur Pier‐giorgio Zanone qui est toujours prêt à accéder à mes requêtes.
Je remercie les anciens doctorants, Frédérique Laberenne, Jimmy Gautier, Jessica Talet et particulièrement Alexandra Cadène pour m’avoir aidé à mettre le pied à l’étrier à mon arrivée. Je remercie les nouveaux doctorants, Laurent Solini, Yannick Wamain et Fabien Dal‐maso pour leur bonne humeur et l’ambiance agréable qu’ils ont fait régner dans le labo cette dernière année.
Je ne peux oublier de remercier Mathieu Andrieux , Jérémy Danna et Philippe Dedieu qui m’accompagnent dans et en dehors du bureau presque depuis le début de ma thèse.
Merci à tous les participants et en particulier Xavier Pros pour être toujours partant pour souffrir en salle d’expérimentation.
Merci à Lionel Castillo sans qui la réalisation de la pédale instrumentée n’aurait pas été possible.
Je remercie Jean Paul Micallef pour m’avoir confié sa selle instrumentée ce qui m’a permis de réaliser une partie de ce travail. Je le remercie aussi tout comme les autres membres de mon jury, Laurence Chèze, Pierre Portero et Serge LeBozec pour avoir accepté d’expertiser mon travail et me permettre d’améliorer la qualité de mes recherches. Enfin, Je pense à mes parents dont le soutien moral m’a permis d’arriver au bout de ce travail. Je pense à Gaby qui nous a quittés trop tôt. Je pense à Stéphanie que j’ai enfin trouvée après avoir beaucoup cherché. A TOUS … MERCI.
TABLE DES MATIERES
Introduction générale ... 11
Chapitre 1
Développement matériel ... 15
1 Introduction ... 15
2 Les systèmes de mesure. ... 16
2.1 L’ergocycle : ... 16 2.2 La pédale ... 18 2.2.1 Aspects théoriques ... 18 2.2.2 Système mécanique ... 21 2.3 Le guidon. ... 24 2.4 La selle. ... 25 3 Résultats ... 25 3.1 Evaluation statique... 25 3.1.1 Données cinématiques ... 25 3.1.2 Données analogiques ... 26 3.1.2.1 Linéarité de la mesure ... 26
3.1.2.2 Point d’application de la force sur la pédale ... 27
3.1.2.3 Reproductibilité de la mesure de la pédale ... 28
3.2 Evaluation dynamique ... 29
3.2.1 Données cinématiques ... 29
3.2.2 Données analogiques ... 29
3.3 Détermination des forces normales et tangentielles ... 30
4 Discussion ... 31
4.1 Cinématique ... 31
4.2 Cinétique ... 31
4.3 Discussion générale ... 32
5 Conclusion ... 33
Chapitre 2
Analyse biomécanique et physiologique des postures classique et
danseuse ... 34
1 Introduction ... 34
1.1.2 Le pédalage assis ... 36
1.1.3 Le pédalage danseuse ... 37
1.2 Approche physiologique de la propulsion ... 38
1.3 Approche mécanique de la propulsion ... 39
2 Matériel et méthode ... 41
2.1 Plateau technique ... 42
2.2 Déroulement de l’étude... 42
2.2.1 Réglages et paramètres de départ ... 43
2.2.2 Etapes ... 44
2.3 Traitement des données ... 44
3 Résultats ... 44
3.1 Couple au niveau du pédalier ... 45
3.2 Orientation de l’effort appliqué sur la pédale ... 47
3.3 Moments articulaires ... 54
3.4 Puissance développée par chaque articulation ... 62
3.5 Le Moment Cost Function ... 64
3.6 Intervention des membres supérieurs ... 67
3.7 Approche physiologique : le rythme cardiaque ... 69
3.8 La perception subjective de l’effort ... 71
4 Discussion générale... 73
5 Conclusion ... 79
Chapitre 3
Etude des paramètres de transition entre la posture classique et la
posture danseuse ... 80
1 Introduction ... 80
1.1 EMG, utilisation, sens... 81
1.2 Les facteurs théoriques pouvant influencer la fiabilité du signal EMG ... 82
1.3 Activité musculaire lors du pédalage ... 86
1.4 Description anatomique et fonctionnelle des muscles étudiés ... 90
1.4.1 Patron d’activation musculaire en posture classique ... 91
1.5 Patron d’activation musculaire en danseuse ... 92
2 Matériel et méthode ... 93
2.1 Le signal EMG : enregistrement, traitement ... 93
2.1.2 Etude de la période d’activation du muscle lors d’un cycle de pédalage ... 94
2.2 Matériel ... 94
2.3 Expérimentation ... 95
2.4 Traitement des données ... 96
3 Résultats ... 99
3.1 Approche cinétique ... 99
3.1.1 Efforts appliqués sur la pédale ... 99
3.1.2 La selle, un informateur pertinent ? ... 100
3.1.3 Efforts sur le guidon ... 102
3.1.4 Moments articulaires ... 104
3.1.5 Puissances articulaires ... 107
3.2 Analyse de l’activité EMG de 4 muscles essentiels à la propulsion ... 108
3.2.1 Périodes d’activation des muscles du membre inférieur droit ... 108
3.2.2 Amplitude de l’activité EMG des membres inférieurs ... 115
4 Discussion ... 117
4.1 Cinétique : ... 118
4.2 Activité EMG : ... 120
4.2.1 Adaptation de l’activité musculaire face à la contrainte ... 120
4.2.2 La transition, une solution à la limite d’adaptation ... 122
5 Conclusion : ... 125
Conclusion Générale et Perspectives ... 127
References ... 130
Annexes ... 140
1 Orientation des forces appliquées sur la pédale pour un participant. ... 140
2 Les premières bicyclettes, les premières techniques de propulsion. ... 141
3 Schéma d’un capteur de forces à jauge de contrainte en pont complet. ... 142
4 Le vélo et ses différents réglages ... 142
Table des illustrations
Figure 1 : Ergocycle ... 16
Figure 2 : Référentiels ... 18
Figure 3 : Composantes de forces appliquées sur la pédale droite ... 19
Figure 4 : Schéma théorique des forces exercées sur la pédale ... 20
Figure 5 : Prototype de la pédale droite. ... 22
Figure 6 : Capteur dynamométrique ... 23
Figure 7 : Jauge de contrainte intégrée au guidon ... 24
Figure 8 : Selle instrumentée ... 25
Figure 9 : Test de linéarité du capteur en compression. ... 27
Figure 10 : Zone d’application de la force. ... 28
Figure 11 : Kinogramme du cycliste. ... 29
Figure 12 : Kinogramme de la manivelle... 30
Figure 13: Forces appliquées sur la pédale. ... 30
Figure 14 : Phases composant un cycle de pédalage. ... 35
Figure 15 : Modèle théorique du cycliste. ... 39
Figure 16 : Moment au niveau de l’axe du pédalier. ... 46
Figure 17 : Forces appliqués sur la pédale droite en posture classique et danseuse. ... 49
Figure 18: Part de forces non propulsives. ... 51
Figure 19 : Part de forces anti-propulsives qui composent la force tangentielle. ... 52
Figure 20 : Modèle cinétique du cycliste. ... 57
Figure 21 : Evolution des moments articulaires... 59
Figure 22 : Puissances articulaires ... 63
Figure 23 : Evolution du MCF. ... 66
Figure 24 : Forces exercées sur le guidon. ... 68
Figure 25 : Evolution du rythme cardiaque. ... 70
Figure 26 : Perception subjective de l’effort. ... 72
Figure 27 : Schéma fonctionnel. ... 87
Figure 28 : Traitement du signal EMG. ... 98
Figure 29 : Résultante des efforts appliqués sur la pédale. ... 99
Figure 30 : Evolution de l’effort appliqué sur la selle. ... 101
Figure 31 : Forces exercées sur le guidon. ... 102
Figure 32 : Moments articulaires. ... 104
Figure 33 : Puissances articulaires. ... 107
Figure 34 : Période d’activation du rectus femoris ... 111
Figure 35 : période d’activation du vastus medialis ... 112
Figure 36 : Période d’activation du biceps femoris ... 113
Figure 37 : Période d’activation du soleus. ... 114
Table des équations
Équation 1 : Puissance. ... 17
Équation 2 : Moment du pédalier ... 19
Équation 3 : Rapport entre les référentiels locaux de la manivelle et de la pédale. ... 20
Équation 4 : Force longitudinale à la manivelle. ... 21
Équation 5 : Indice d’Efficacité du Pédalage ... 48
Équation 6 : Moment de force... 55
Équation 7 : Moment dynamique de la cuisse, de la jambe et du pied ... 58
Équation 8 : Moment Cost Function ... 65
Équation 9 : iEMG ... 93
Équation 10 : iEMG moyen ... 94
Tableaux
Tableau 1 : Caractéristiques anthropométriques de la population étudiée... 42Tableau 2 : Extrema du moment au niveau du pédalier pour les deux postures. ... 46
Tableau 3 : Tableau récapitulatif des caractéristiques posturales ... 77
Table des abréviations :
eX,eY,eZ Référentiel global du plateau expérimental. eYg,eZg Référentiel local du guidon.
eZs Référentiel local de la selle. eXp,eYp,eZp Référentiel local de la pédale. eXm,eYm,eZm Référentiel local de la manivelle. R Force résultante appliquée sur la pédale.
Fn,Ft Force longitudinales à la manivelle, force perpendiculaire à la manivelle. Fs,Fp Force antéro-postérieure à la pédale, force perpendiculaire au plateau la pédale.
GM Gluteus maximus RF Rectus femoris TA Tibialis anterior VL Vastus lateralis VM Vastus medialis GC Gastrocnemiens
BF biceps femoris ; BFsh (short head)
A1 Axe de rotation de la hanche (plan sagittal) A2 Axe de rotation du genou (plan sagittal) A3 Axe de rotation de la cheville (plan sagittal) A4 Axe de rotation de la pédale (plan sagittal) G1 Centre de gravité de la cuisse
G2 Centre de gravité de la jambe G3 Centre de gravité du pied
θ1 Angle entre l’axe longitudinal de la cuisse et l’horizontal (eY) θ1 Angle entre l’axe longitudinal de la jambe et l’horizontal (eY) θ1 Angle entre l’axe longitudinal du pied et l’horizontal (eY)
VO2 Volume d’oxygène consommé. Le VO2max est la quantité maximale d'oxygène par unité de temps qu'un organisme est capable de prélever.
PMA La Puissance Maximale Aérobie correspond à la puissance développée par le sujet lorsqu’il atteint son VO2max
VMA Vitesse Maximale Aérobie. Vitesse maximale où se réalise le changement de filière énergétique. Vitesse minimale de course permettant d’atteindre le VO2max.
Introduction générale
Le premier vélo possédant les éléments fondamentaux de la bicyclette moderne date de 1855 et a été développé par les ingénieurs français Michaux et Lallement. Déjà à l’époque, le but était de faciliter la locomotion en cherchant à augmenter la vitesse de déplacement tout en réduisant les efforts. L’ancêtre du vélo imaginé par le Comte Mede de Sivrac en 1790 sans système de direction ni propulsion visait déjà cet objectif en profitant au maximum des lieux de pratique et notamment des descentes. Deux siècles plus tard, les objectifs n’ont pas changé, cependant les améliorations techniques ont permis d’aller toujours plus loin, plus vite avec moins d’efforts musculaires.
Avec le réchauffement planétaire, la pollution automobile, la volonté de retour à la nature, le vélo redevient un moyen de locomotion de plus en plus prisé. L’implantation de bornes de vélos en libre accès dans les villes est devenue un symbole de modernité. Imaginé il y a plus de deux siècles, la bicyclette a survécu à l’ère de la facilité avec l’avènement du pétrole et de la locomotion motorisée. Durant tout ce temps, elle a su évoluer avec son temps et notamment profiter de l’évolution industrielle, de la recherche et développement par l’utilisation de nouveaux concepts (VTC, VTT, BMX Freestyle, descente), nouveaux matériaux (aluminium, carbone, magnésium), nouveaux mécanismes (dérailleurs, suspensions). En 1924 Tullio Campagnolo (Italie) invente le premier dérailleur permettant de changer de braquet tout en pédalant. Braquets et dérailleurs sont certaines des applications mécaniques les plus flagrantes de l’utilisation des principes des leviers d’Archimède pour permettre le déplacement à partir de forces extérieures. Les fondements de la propulsion en cyclisme s’appuient sur l’utilisation des leviers pour optimiser la transformation des forces créées par le pratiquant en une vitesse de déplacement. Il existe une forte similitude entre le dérailleur artificiel et «le dérailleur anatomique » qu’est le corps humain. En effet, le corps est composé d’actionneurs que sont les muscles, de leviers formés par les os et axes de rotations formés par les articulations. Le tout se rassemble en une chaîne mécanique permettant la propulsion.
Dans l’objectif d’aller plus vite avec moins d’efforts musculaires, nous pouvons soit modifier le système de propulsion matériel soit agir sur le système de propulsion anatomique. Ce deuxième cas se produit très naturellement lorsque nous choisissons de diminuer la vitesse du mouvement,
qui nous ont intéressées dans le cadre de cette étude. Il s’agit d’utiliser les principes de la mécanique pour mettre en évidence les adaptations internes de l’organisme face à l’augmentation de la contrainte.
Comprendre l’interaction entre la bicyclette et le sportif est essentiel pour optimiser la performance, comprendre un comportement ou résoudre un problème médical (douleurs articulaires par exemple). La diminution du temps nécessaire à un cycliste pour parcourir une distance donnée peut être assimilée à la notion de performance. Les études s’intéressant à cette question ont tenté de déterminer les critères d’optimisation ayant une influence sur la performance. Certaines études se sont intéressées à la fréquence de pédalage, d’autres à la modification de la posture soit par des modifications du matériel soit par un changement de technique de pédalage (Hull et al. 1988; Gonzalez et al. 1989). Selon certains auteurs, la technique de pédalage a une influence sur la dépense énergétique. Dans des conditions de pratique comparables, le cycliste expert consomme moins d’O2 (Vo2) que le cycliste débutant
(Coyle et al. 1991). Comme l’expert réalise de meilleures performances que le débutant, la diminution de la consommation d’O2 semble être un bon critère d’optimisation. De plus, ce résultat laisse penser que le cycliste expert a optimisé sa technique de pédalage. Chapman a ainsi mis en avant les différences dans le patron d’activation musculaire entre les cyclistes novices et les cyclistes experts (Chapman et al. 2006; Chapman et al. 2007; Chapman et al. 2008).
Partant de l’idée que la technique de pédalage pouvait être optimisée, nous nous sommes intéressés à une condition de pratique particulière en cyclisme qu’est le franchissement de côtes. Il est fréquent voire systématique que les cyclistes passent de la posture assise sur la selle à une posture debout sur les pédales (dite posture danseuse) pour franchir les zones de montée. Nous pouvons considérer ce changement de posture comme une adaptation de la technique de pédalage à la condition de pratique. Partant de l’hypothèse que le cycliste a toujours tendance à choisir la posture la plus « facile », quelles sont les raisons qui sous-tendent l’utilisation de la posture danseuse au détriment de la posture classique ? Nous nous intéressons donc à une adaptation de la technique de pédalage liée à une augmentation de la puissance développée. En comparaison avec l’étude de la posture classique, très peu de travaux se sont intéressés à la posture danseuse. Il n’y a pas à notre connaissance de travaux permettant de déterminer les critères fondamentaux permettant de différencier les postures danseuses et classiques et qui expliqueraient l’intérêt de la posture danseuse lors du franchissement de côtes. Les études traitant de l’approche physiologique de la posture danseuse n’ont pas permis de justifier l’utilisation de cette posture (Li et al. 1998; Millet et al. 2002). Cependant, une approche plus biomécanique du problème a permis d’apporter plusieurs pistes (Caldwell et al. 1998) ce qui justifie notre intérêt pour cette approche biomécanique du pédalage.
Notre travail est composé de trois parties :
I) Développement matériel
Objectif : L’analyse de la propulsion selon des aspects mécaniques nécessite le
développement de matériel de mesure des forces appliquées entre le cycliste et la bicyclette. Pour étudier cette interaction, nous avons développé et testé des interfaces mesurant les contraintes mécaniques qui s’exercent au niveau de tous les points de contact entre le cycliste et son vélo.
Ce chapitre présente le développement de trois interfaces de mesure permettant de compléter les lacunes des dispositifs commerciaux présents sur notre plateau expérimental. En particulier, nous présentons en détails une méthode originale de mesure des efforts appliqués sur la pédale.
Une première interface permet de mesurer les efforts verticaux exercés sur la selle. Une deuxième permet de mesurer les efforts verticaux exercés sur le guidon. Enfin, la troisième interface permet de mesurer les composantes de la force résultante appliquée sur la pédale. Nous avons présenté dans un premier temps les différentes contraintes théoriques liées au développement d’appareils de mesures. Nous nous sommes intéressés aux méthodes théoriques permettant d’obtenir les variables recherchées. Ensuite, nous avons présenté les différentes étapes de prototypage grâce aux outils de conception assistée par ordinateur. Enfin, nous avons réalisé les différents tests (précision, fluage, reproductibilité) afin de valider l’utilisation de ces appareils de mesure dans la suite de l’étude.
II) Analyse biomécanique et physiologique des postures classique et danseuse
Objectif : Justifier l’utilisation des techniques de pédalage assis et en danseuse. Lors d’une
première expérimentation, nous avons tenté de déterminer des variables permettant d’expliquer l’utilisation d’une posture plutôt qu’une autre en fonction de la puissance développée par le cycliste. Parmi les variables mécaniques et physiologiques couramment employées dans les travaux de recherche sur le cyclisme, nous avons tenté d’employer les plus pertinentes pour justifier ce choix postural.
En nous appuyant sur des outils théoriques (variables) présentés dans la littérature, nous avons testé les sept outils les plus pertinents afin de comprendre l’intérêt de l’utilisation d’une posture particulière en fonction de la puissance développée. Après la présentation des différents aspects théoriques de la propulsion en cyclisme, nous avons décrit le protocole expérimental général. Puis nous avons analysé les résultats en procédant variables par variables. Ainsi, nous avons précisé tour à tour les fondements théoriques et méthodologiques propres à chaque variable suivi
Chaque outil permet d’avoir une observation cadrée sur une partie du phénomène de propulsion. Nous avons analysé la propulsion du cycliste en commençant par la conséquence qu’est l’avancée du vélo en élargissant vers les causes qui en sont à l’origine. Pour être plus précis, nous avons commencé par étudier le couple au niveau du pédalier qui défini au mieux les conséquences propulsives de la technique de pédalage. Nous avons ensuite analysé les forces appliquées sur la pédale dont une seule part est à l’origine de la création du couple propulsif au niveau du pédalier. Nous nous sommes intéressés aux moments articulaires des membres inférieurs ainsi qu’aux puissances articulaires qui conditionnent la réalisation du mouvement et donc la création de forces au niveau de la pédale. Nous avons évalué l’implication des membres supérieurs dans le mouvement. Plus globalement, nous avons étudié l’évolution du rythme cardiaque. Enfin, nous nous sommes intéressés à la perception que le pratiquant avait de son propre effort. Le chapitre se termine sur une discussion générale concernant les différents outils employés et les résultats obtenus.
III ) Etude des paramètres de transition entre la posture classique et la posture danseuse
Objectif : Analyser le phénomène de transition de la posture classique vers la posture
danseuse. L’objectif est de déterminer lors d’une nouvelle expérimentation l’élément limitant de la posture classique qui entraîne le phénomène de transition vers la posture danseuse.
A partir des résultats du chapitre précédent et en complétant les limites observées grâce à de nouveaux outils comme l’analyse électromyographique, nous avons cherché à étudier le phénomène de transition entre la technique de propulsion classique et la technique danseuse. Dans ce chapitre nous avons mis en rapport le patron d’activation musculaire1 et ses conséquences propulsives. En mettant en relation un critère électro-physiologique (EMG) et les conséquences mécaniques (moments articulaires, forces appliquées sur la pédale), nous avons cherché à comprendre ce qui pouvait déclencher la transition de la posture classique vers la posture danseuse. En particulier, nous nous sommes intéressés à l’évolution de l’activité musculaire en fonction de l’augmentation de la puissance afin d’observer quel est l’élément limitant de la posture classique nécessitant une modification posturale radicale qu’est la transition vers la posture danseuse. En d’autres termes, comment caractériser le seuil à partir duquel l’adaptabilité de la posture classique ne suffit plus à compenser l’augmentation de la contrainte ? Dans un premier temps nous avons présenté les aspects théoriques liés à l’étude du patron d’activité musculaire. Nous avons ensuite présenté le protocole expérimental et le plateau technique nécessaire à notre étude. Enfin, les résultats sont observés puis discutés.
Chapitre 1
Développement matériel
1 Introduction
L’objectif de ce chapitre est de présenter les dispositifs de mesure permettant d’étudier les interactions mécaniques entre le cycliste et son vélo. Dans l’exercice du pédalage les cyclistes possèdent des appuis au niveau de 3 zones que sont : la selle, le guidon et les pédales. Ces zones de contact constituent des appuis au sens de la mécanique, c’est-à-dire là où s’opèrent les forces de réaction. La connaissance de ces forces est nécessaire pour analyser et comprendre les efforts développés par le cycliste.
De nombreux systèmes ont été développés. Les premiers modèles permettaient de mesurer uniquement la part propulsive de l’effort appliqué sur la pédale (Hoes et al. 1968; Davies et al. 1976; Sargeant et al. 1977; Sargeant et al. 1978; Brooke et al. 1981). Ce système à été modernisé puis commercialisé pour pouvoir être utilisé sur une bicyclette personnelle (Gardner et al. 2004). Par la suite, d’autres systèmes ont été développés permettant des études en deux dimensions dans un premier temps (Patterson et al. 1983; Gregor et al. 1985; Newmiller et al. 1988; Reiser 2003) puis en trois dimensions(Soden et al. 1979; Hull et al. 1981; Ruby et al. 1993; Boyd et al. 1996). Cette nouvelle évolution dans les dispositifs a permis de mesurer toutes les composantes de forces appliquées sur la pédale. Cette avancée fournit des données essentielles pour répondre aux problèmes d’efficacité du mouvement et de rendement mécanique.
Les progrès technologiques notamment en termes de miniaturisation ont permis la réalisation de capteurs plus légers, énergétiquement autonomes, incluant leur propre système d’acquisition de données. Cela a entraîné la tendance actuelle pour la création de systèmes embarqués favorisant leur utilisation sur le terrain (Rowe et al. 1998; Stapelfeldt et al. 2007; Hug et al. 2008). Il faut aussi remarquer d’autres approches dont le but est de proposer des alternatives aux systèmes déjà développés en optimisant ces derniers au niveau de la précision, de la reproductibilité, de la légèreté. Nous pouvons citer par exemple l’étude de Mornieux (Mornieux et al. 2006) qui utilise une combinaison originale entre un ergocycle et une plate forme de force.
Le système que nous avons développé suit cette logique d’optimisation. La base du mécanisme est un ergocycle à courant de Foucault dont les propriétés fondamentales sont de pouvoir faire varier la résistance au pédalage grâce à un système électromécanique sans frottement. Le cahier des charges consiste à développer un système de mesure des composantes de forces appliquées par le cycliste sur la pédale en deux dimensions. Plus précisément, le système doit permettre de
connaître l’orientation et la valeur des forces utiles et inutiles exercées par un cycliste sur une pédale tout au long d’un cycle de pédalage. Pour compléter les capacités de mesure de l’ergocycle, nous nous intéresserons à tous les points de contact entre le cycliste et la bicyclette. Dans cette optique, nous avons développé un guidon mesurant les efforts en traction-compression ainsi qu’un système mesurant les efforts de traction-compression sur la selle.
2 Les systèmes de mesure.
2.1 L’ergocycle :
Figure 1 : Ergocycle
Il existe deux grands types d’ergocycle (ou cyclo-ergomètre). Le premier est composé d’une bicyclette placée sur un tapis roulant motorisé. L’intérêt principal est de permettre au sujet d’utiliser son propre matériel ce qui évite les problèmes d’adaptation. Ce type d’ergocycle est connu comme étant plus réaliste vis-à-vis de la pratique notamment concernant les oscillations latérales du cycliste (Duc et al. 2006). Il pose cependant de grandes difficultés d’instrumentation rendant impossible la réalisation de nombreux protocoles. Certaines études ont proposé quelques systèmes de mesures originaux permettant une adaptation sur bicyclette commerciale donnant l’avantage non négligeable de pouvoir être utilisé sur le terrain (Stapelfeldt et al. 2007; Hug et al. 2008).
Le deuxième type d’ergocycle présente toutes les caractéristiques d’une bicyclette mais la résistance au mouvement s’applique directement sur l’axe du pédalier. L’absence de frottement roue/sol comme dans le premier type limite les biais expérimentaux, la manipulation des contraintes appliquées sur le cycliste est facilitée. Beaucoup d’ergocycles modernes utilisent une technologie magnétique pour freiner la propulsion ce qui limite la variabilité liée aux problèmes de friction. Le système d’électro-aimant permet un ajustement régulier, rapide et programmable de la résistance au pédalage. Enfin, ce type d’ergocycle facilite l’intégration d’appareils de mesures. Toutes ces caractéristiques permettent d’augmenter la précision des données ce qui a influencé notre choix pour ce type d’ergocycle.
Nous avons utilisé un ergocycle à courant de Foucault (Lode© EXCALIBUR Sport,Groningen, Netherlands). Les caractéristiques géométriques de l’appareil sont modifiables ce qui permet un complet paramétrage de la posture du cycliste. Grâce à un contrôle informatique, il permet de faire varier en temps réel ou préprogrammé la résistance appliquée sur l’axe du pédalier. Il est ainsi possible d’imposer au cycliste une puissance à développer. Des capteurs mesurent la fréquence de pédalage ainsi que le moment au niveau de l’axe du pédalier induit par l’action du pied sur la pédale.
La puissance développée au niveau de l’axe du pédalier est déterminée à partir du moment net calculé au niveau de ce même axe ainsi que la vitesse de rotation de la manivelle (eq. 1).
.
P : Puissance développée (W)
M : Moment net exercé au niveau de l’axe de rotation (N.m) ω : Vitesse angulaire (rad/s)
Équation 1 : Puissance.
La résistance de l’ergocycle est ajustée automatiquement en fonction de la fréquence de pédalage afin de maintenir la puissance préprogrammée. Ainsi, si la fréquence de pédalage diminue, la résistance de l’ergocycle augmente faisant augmenter le moment au niveau du pédalier ce qui permet de maintenir une puissance constante.
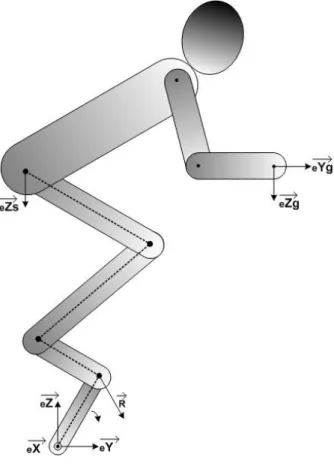
Figure 2 : Référentiels
Référentiel global du plateau technique et référentiel locaux du modèle d’étude du cycliste.
L’origine du repère est au centre du pédalier. L’axe eX correspond à l’axe de rotation du pédalier orienté vers la pédale droite. L’axe eY est parallèle au sol (supposé horizontal) orienté vers l’avant de l’ergocycle. L’axe eZ est perpendiculaire au sol orienté de bas en haut. Tous les axes de rotation des articulations sont considérés comme parallèles à l’axe eX. Le cycliste et l’ergocycle appartiennent à un seul et même modèle dont les segments sont liés. Nous pouvons identifier les plans anatomique décrits par Zatsiorsky (Zatsiorsky et al. 1990) (de Leva 1996) pour caractériser le système cycliste-ergocycle (frontal :eX+eZ, transversal : eX+eY, sagittal : eY+eZ). Notre modèle étant en deux dimensions, toutes les coordonnées mesurées seront codées en fonction de eY et de eZ c'est-à-dire sur le plan sagittal.
2.2 La pédale
2.2.1 Aspects théoriques
L’objectif de notre pédale instrumentée est de mesurer les composantes de la force résultante appliquée par le pied sur la pédale (2D).
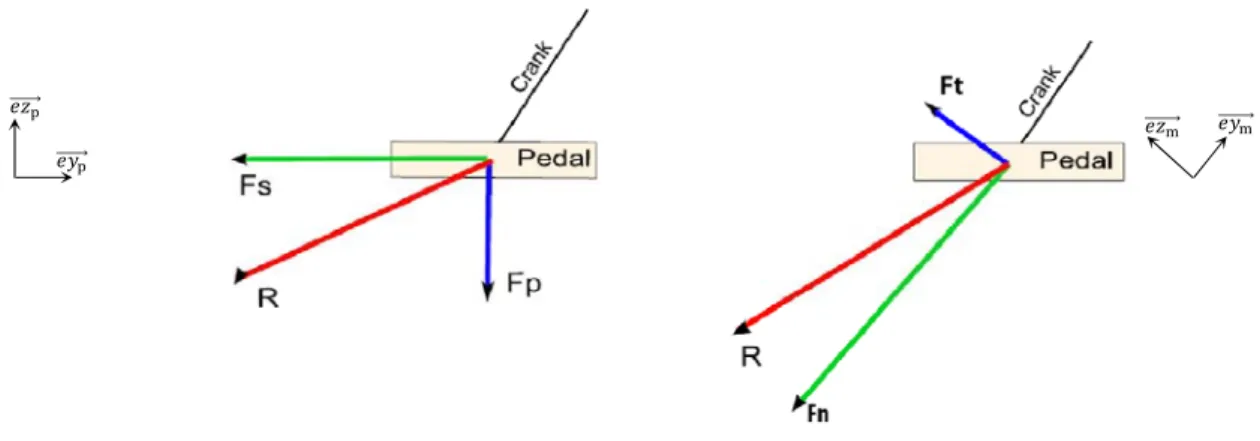
Figure 3 : Composantes de forces appliquées sur la pédale droite
Le cycliste exerce un effort sur la pédale que l’on peut représenter par une force résultante (R Fig.3). Cette résultante peut être déterminée selon deux référentiels :
- Le référentiel pédale où la résultante peut être divisée en deux composantes que sont Fp (normale à la pédale eZp) et Fs (parallèle à la pédale eYp). Fp représente la résultante des forces
exercées perpendiculairement au plateau de la pédale. Elle est considérée comme positive lorsqu’elle est orientée vers le haut représentant ainsi une traction de la pédale. Fs appartient au plan défini par le plateau de la pédale. Elle est perpendiculaire à l’axe de rotation de la pédale. Par convention, Fs sera positive lorsqu’elle s’exercera de l’arrière vers l’avant.
- Le deuxième repère se réfère à la manivelle où la résultante peut être divisée en deux composantes que sont Ft (tangente à la trajectoire de la pédale eZm) et Fn (selon la direction de la
manivelle eYm). Ft, perpendiculaire à la manivelle, est la seule la force utile au pédalage. C’est
en effet la seule force qui peut entraîner la rotation de la manivelle et donc permettre la propulsion. Elle est considérée comme positive lorsqu’elle entraîne un pédalage dans le sens horaire. Fn s’exerce selon l’axe longitudinal de la manivelle et est considérée comme négative lors d’une compression de manivelle.
Nous avons vu que l’ergocycle permettait d’obtenir le moment appliqué au niveau de l’axe du pédalier. Cette information permet d’obtenir la force perpendiculaire à la manivelle (Ft) selon l’équation :
/
·
M : Moment au niveau de l’axe du pédalier (O) lié à l’action de la force Ft L : Longueur de la manivelle
Ft : Force appliquée perpendiculairement à la manivelle
Équation 2 : Moment du pédalier
Pour déterminer la résultante (R) de forces appliquées sur la pédale, nous cherchons à obtenir la valeur de la force normale (Fn) qui correspond aux efforts en traction compression longitudinalement à la manivelle. La solution la plus évidente consisterait à mesurer directement les contraintes internes qui s’exercent ce qui n’est pas matériellement réalisable. Une jauge de contrainte de force ne peut être insérée dans la manivelle car le capteur permettant le calcul du couple au niveau de l’axe du pédalier y est déjà inséré. Une autre méthode permet de déterminer la résultante des forces appliquées sur la pédale en combinant les deux repères décrits précédemment. Nous obtenons un système à deux équations et deux inconnues (équation 2) que nous pouvons résoudre grâce à la modélisation présentée sur la figure 3 :
R n F t Fr + r = r R s F p Fr + r = r donc Frt+Frn=Frp+Frs
Équation 3 : Rapport entre les référentiels locaux de la manivelle et de la pédale.
Figure 4 : Schéma théorique des forces exercées sur la pédale
La pédale ne peut effectuer qu’un mouvement de rotation autour d’un axe transversal la traversant en son centre. L’angle φ correspond à l’angle entre l’axe horizontal et l’axe antéropostérieur de la pédale. φ est positif dans le sens antihoraire. La manivelle (de longueur L) ne peut effectuer qu’une rotation autour de son extrémité fixée sur le pédalier (O Fig. 4). La manivelle forme l’angle α avec l’horizontal. Le sens positif est antihoraire et α est égal à 0° lorsque la manivelle est horizontale, orientée vers l’avant du vélo. Mo est le moment au niveau de
résoudre le système présenté ci-dessus (équation 3), nous projetons sur l’axe perpendiculaire à la manivelle toutes les forces appliquées sur la pédale. Nous obtenons les égalités suivantes (équation 4) :
0
)
90
(
)
(
)
(
−
+
×
−
=
×
+
×
×
Sin
Fs
Cos
Ft
Sin
Fn
Fp
α
ϕ
α
ϕ
)
(
)
(
ϕ
α
ϕ
α
−
−
×
−
=
Cos
Sin
Fp
Ft
Fs
Équation 4 : Force longitudinale à la manivelle.
Afin de résoudre cette équation, le système mécanique développé doit permettre de réduire le nombre d’inconnus. Nous sommes maintenant capables de déterminer quels paramètres la pédale instrumentée doit pouvoir quantifier :
-Elle doit permettre la mesure des efforts de traction/compression, perpendiculairement à la pédale (Fp).
-Elle doit permettre de mesurer l’orientation de la force normale à la pédale en utilisant le vélo comme référentiel (φ).
2.2.2 Système mécanique
Le système mécanique s’adapte à l’extrémité d’une manivelle standard ce qui implique l’utilisation d’une fixation par filetage suivant les normes actuelles de fixation de pédale. A terme, le mécanisme pourra être déplacé sur n’importe quel ergocycle ou bicyclette personnelle. Le système ne doit pas dépasser l’épaisseur standard hors cale d’une pédale classique. Le capteur doit être situé sous la pédale pour ne pas influer sur la distance entre l’axe de la pédale et le dessous du pied. Enfin, il importe de réduire le poids du mécanisme afin de minimiser les influences inertielles liées à la présence de cette masse supplémentaire. Afin de répondre à ces contraintes, nous avons sélectionné un capteur dynamométrique (1D) à jauge de contrainte (Entran© ELIM series).
La mesure s’effectue perpendiculairement à la pédale ce qui implique la rotation du capteur avec la pédale. La force appliquée par le pied sur la partie supérieure de la pédale doit être transmise au travers de la pédale au capteur situé dans la partie inférieure. Un prototype a été imaginé suivant les méthodes de dessin assisté par ordinateur (Figure 5).
Figure 5 : Prototype de la pédale droite.
Vue assemblée et éclatée en conception assistée par ordinateur.
Les différents éléments qui composent le mécanisme sont les suivants :
-Le plateau de contact (fig.5 élément a) : Il s’agit de l’unique surface d’interaction entre le pied et la pédale. Il est composé d’un plateau et d’un étrier à sangle dont le but est de permettre le transfert de force entre le pied et la pédale. L’utilisation d’étriers permet une mesure des forces de tractions et non uniquement les forces de poussée sur la pédale. Le système est destiné à un public non professionnel qui n’est pas coutumier de l’utilisation de pédales automatiques2. Une adaptation au matériel ne sera donc pas nécessaire et l’interaction pied pédale sera similaire à celle présente sur une bicyclette classique. Le plateau de contact a été conçu en téflon (polytetrafluorethylene), matériau connu pour sa légèreté (masse volumique : 2200 kg.m-3) et sa tolérance à la déformation (limite d’élasticité3 : 2500 Kg/mm2).
-Deux marqueurs réfléchissants (fig.5 élément f) sont placés aux extrémités antérieures et postérieures du plateau de contact. Grâce au système optoélectronique, nous pouvons déterminer leurs coordonnées spatiales et en déduire l’angle (φ) entre l’axe antéropostérieur de la pédale (eYp fig.5) et l’horizontal.
2
Les pédales automatiques possèdent un système de fixation permettant de solidariser la semelle de la chaussure et la pédale. La rigidité du système d’accroche facilite le transfert de forces entre le pied et la pédale en poussée comme en traction. Elles nécessitent cependant l’utilisation de chaussures particulières adaptées à chaque participant.
3
La limite d’élasticité est la limite de contrainte appliquée sur un matériau à partir de laquelle la déformation
a) Plateau de contact b) Corps de pédale et axe de rotation c) Support de pédale e) Capteur de force d) Axe de transfert f) Marqueurs
-Le corps de pédale (fig. 5 élément b) : Partie centrale, elle est traversée par l’axe de la pédale et permet la fixation du mécanisme sur la manivelle. Elle intègre des roulements à billes permettant la rotation de la pédale sur son axe tout en minimisant les forces de frottements (coefficient de frottement<0,01).
-Le support de pédale (fig. 5 élément c) : Il sert de socle au capteur de forces. Il suit en permanence le mouvement de la pédale ce qui maintient le capteur parallèle au plateau de contact.
-L’axe de transfert (fig. 5 élément d) : Il s’agit du seul élément relié au plateau de contact. Pièce de faible déformation, elle transfert les efforts appliqués perpendiculairement au plateau vers la partie centrale du capteur de forces. Elle possède une mobilité longitudinale ce qui permet la répercussion autant des forces de traction que des forces de compression. L’axe de transfert tolère une rotation de ± 10° selon son axe longitudinal (eZp). Cette possibilité de rotation limite les risques de douleur et lésions du genou mise en évidence dans la littérature (Ruby et al. 1992; Gregor et al. 1994).
Support, corps de pédale et axe de transfert sont fabriqués par fraisage à partir d’une matrice d’aluminium présentant un très bon compromis entre faible poids (masse volumique : 2700 kg.m-3) et faible déformation (Module de Young4 : 6900Kg/mm2).
-Le capteur dynamométrique 1D (fig. 5 élément e): Il est fixé en son centre par l’axe de transfert et par son contour par le support de pédale. Il mesure grâce à la mobilité de l’axe de transfert les efforts de traction compression exercés selon son axe longitudinal (eZp Fig.6). Toutes les forces exercées sur un axe autre que eZp ne sont pas mesurées par le capteur et n’induisent ainsi pas de signal. Toutes les forces colinéaires à l’axe eZp sont mesurées et nous considérons donc que le capteur mesure la résultante des forces exercées perpendiculairement au plateau. Les caractéristiques du capteur (constructeur) sont précisées en annexe.
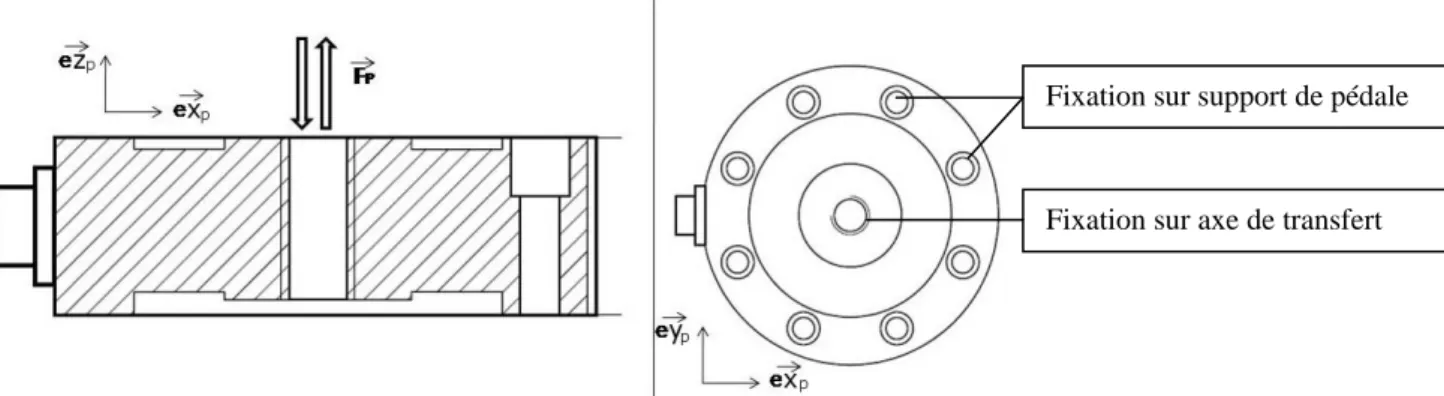
Figure 6 : Capteur dynamométrique
La masse totale du mécanisme est de 460g (capteur : 310g) pour des dimensions de 76*76*72 mm. Suite aux données mesurées par Stone (Stone 1990) nous avons une idée des contraintes
4
Le module de Young ou module d’élasticité longitudinale représente le rapport entre la contrainte en
Fixation sur support de pédale
que doit subir le capteur pour des épreuves n’excédant pas 600W (Fx=525N, Fy=175N, Fz=1925N). D’après les tests industriels, le capteur mesure les forces allant de -2000N à +2000N ce qui correspond à notre échelle de mesure. Le signal (±5v) est amplifié puis traduit grâce à une carte d’acquisition analogique/digitale d’une précision de 12bits à une fréquence de 1000Hz5. La mesure des angles permettant de déterminer l’orientation des forces est réalisée par un système d’enregistrement de la cinématique du mouvement. L’acquisition de la cinématique est réalisée grâce à un système optoélectronique (Vicon®Oxford’s Metrics®, Oxford, UK, 8 caméras 100Hz) synchronisé avec la carte d’acquisition analogique décrite précédemment. Les données cinématiques permettent de calculer la fréquence de pédalage instantanée habituellement représenté en rotation complète de manivelle par minute (Rpm).Cette donnée peut être confirmée par l’ergocyle qui mesure cette même fréquence de pédalage de manière analogique.
2.3 Le guidon.
Figure 7 : Jauge de contrainte intégrée au guidon
En nous inspirant des études déjà réalisées (Soden et al. 1979; Stone et al. 1993; Stone et al. 1995), nous avons développé notre propre système de mesure des efforts exercés par le cycliste sur le guidon (Fig.7). Une jauge de contrainte est placée entre le guidon et la potence ce qui permet de mesurer les efforts en traction-compression exercés longitudinalement au capteur. Le repère de référence du capteur est parallèle au repère global du plateau expérimental défini au niveau de l’ergocycle. L’axe de mesure des forces exercées sur le guidon est perpendiculaire au
5
L’échelle de mesure est divisible en 212 valeurs (12 bits = 4096 digits, ±2000 digits + saturation). L’étendue de mesure est de ±7,5mV, ce qui donne un cran de mesure de 7,5/2000=3,7µV. La valeur nominale du capteur est de 2mV/V ce qui donne 20mV pour notre capteur 500N alimenté en 10V. Conclusion, la différence minimale de mesure accessible par la carte d’acquisition est de 0,0037×500/20=0,1 N (sensibilité). Une numérisation de la
Capteur de forces
sol (eZ). Le capteur utilisé supporte des forces maximale de 500N ce qui reste dans les limites de forces exercées dans notre étude.
2.4 La selle.
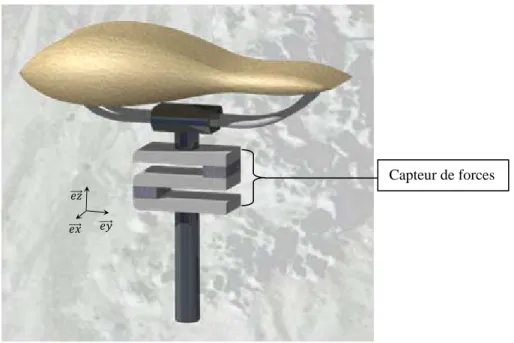
Figure 8 : Selle instrumentée
Comme le guidon, la selle est équipée d’une jauge de contrainte unidirectionnelle. Ce capteur de force (type pont de Wheatstone) est fixé sur un support en double flexion (Type « S ») permettant une mesure plus précise qu’une fixation directe sur la tige de selle. Nous pouvons mesurer les efforts en traction compression exercés perpendiculairement à celle-ci6. Dans la pratique les efforts sur la selle ne peuvent être réalisés qu’en compression. Le principe du capteur de selle est similaire à celui employé dans les travaux de Stone (Stone 1990).
3 Résultats
3.1 Evaluation statique 3.1.1 Données cinématiques
La précision des données obtenues est directement liée à la qualité du système optoélectronique employé. Nous avons utilisé un système Vicon© composé de huit caméras infrarouges permettant d’obtenir les coordonnées en trois dimensions de marqueurs réfléchissants placés sur le matériel. Grâce à un objet indéformable et des marqueurs fixés à ses extrémités, nous avons testé de manière statique si les distances inter-marqueurs évaluées par le système optoélectronique correspondent bien aux distances réelles. Théoriquement, plus le temps de calibrage est long plus la précision des mesures de la session expérimentale sera importante. Durant toutes nos expérimentations nous nous sommes efforcés de respecter le temps de calibrage minimum fixé
6
La selle a été développée plus tardivement et n’a été employée que dans la deuxième session expérimentale de
par le constructeur. Nous avons fait des tests de mesures répétés à différents endroits de l’espace visible par les huit caméras. Après quarante mesures d’une même distance, l’erreur moyenne 3 dimensions est de 6.e-4 ±2.e-5 m.
Outre les imprécisions propres au système de mesure, il est essentiel de limiter les imprécisions liées au placement des marqueurs que le système optoélectronique repère.
En particulier, le mouvement des marqueurs sur la peau a été source de discussion dans la littérature (Cappozzo, Catani et al. 1996; Fuller, Liu et al. 1997; Holden, Orsini et al. 1997; Manal, McClay et al. 2000). Reinschmidt a notamment remarqué que les marqueurs de la jambe présentaient des imprécisions plus importantes que ceux de la cuisse (Reinschmidt et al. 1997). Cependant, Neptune a montré que les imprécisions liées au mouvement des marqueurs de la hanche avaient peu d’influence sur les calculs des moments articulaires (Neptune et al. 1995). Il faut de plus s’assurer de la bonne adéquation entre le placement des marqueurs sur le participant (repères anatomiques) et les points caractéristiques de notre modèle théorique. Ramakrishnan montrait que lors de l’étude de la marche, l’imprécision liée au placement des marqueurs n’avait que peu d’influence sur le calcul des angles de flexion/ extension du genou et de la hanche (Ramakrishnan et al. 1991).
3.1.2 Données analogiques
Les tests statiques permettent d’évaluer la précision du capteur. Pour valider l’utilisation d’un capteur dynamométrique, nous avons effectué la mesure à partir de forces de références. Nous avons utilisé différentes masses dont le poids est connu. Connaissant la direction, le sens, le point d’application et la valeur de ces forces, nous avons pu vérifier la mesure fournie par les capteurs dans différentes situations statiques.
3.1.2.1 Linéarité de la mesure
Pédale instrumentée :
L’objectif est de déterminer l’erreur systématique propre à notre capteur afin d’évaluer les corrections qui devront être apportées aux mesures réalisées durant l’expérimentation. N’ayant pas d’appareil de calibrage pour estimer cette erreur, nous avons procédé à la mesure d’une force connue. Pour tester le bon placement du capteur dynamométrique et la linéarité du système de mesure, nous avons utilisé différentes masses (2,5 ; 5 ; 7,5 ; 10 ; 15 ; 20 ; 40 Kg) et évalué l’erreur de mesure entre la force appliquée verticalement (poids respectifs des différentes masses) et la force mesurée. La valeur moyenne pour 5 secondes de mesure représente l’intensité de la force mesurée. Enfin, le rapport entre la valeur mesurée à la valeur de la charge testée permet d’estimer la linéarité du capteur en compression puis en traction. L’intérêt de ce test est de déterminer pour le capteur de force utilisé quel est le rapport d’échelle entre la tension électrique en Volt fournie par le capteur et la Force en Newton qu’il subit. Pour calculer ce
rapport, nous avons procédé à une régression linéaire des tensions obtenues. Nous avons déterminé par dérivation le coefficient directeur de la régression linéaire ce qui correspond au rapport d’échelle. Il y a un rapport constant (dans un capteur non altéré) entre la tension du capteur et la contrainte qu’il subit. En effet, plus la contrainte est importante, plus la tension électrique du signal augmente suivant les principes des jauges de contraintes montées en pont de Wheastone7.
Figure 9 : Test de linéarité du capteur en compression.
Mesure des forces appliquées en fonction de différentes masses utilisées.
Le signal est amplifié pour obtenir une tension suffisamment importante et une résolution optimale tout en évitant la saturation de la carte d’acquisition (5v). La carte d’acquisition permet la numérisation des données analogiques à une fréquence de 1000Hz. L’erreur moyenne obtenue est de 1,29N en compression et 1,32N en traction.
Guidon et selle :
La précision des données issues du guidon suite à 40 mesures successives pour 5 forces de référence est de 0,8N en traction et 0,8N en compression.
Les tests réalisés sur la selle donnent une précision de mesure des forces appliquées de 1,2N en compression.
3.1.2.2 Point d’application de la force sur la pédale
Le point d’application de la force de contact sur la surface du plateau a-t-elle une influence sur la précision de la mesure au niveau du capteur ? Nous avons évalué la précision spatiale grâce à 1400 mesures effectuées sur 7 zones (200 par zone) du plateau de contact. La différence entre la mesure et la force réellement appliquée correspond à l’erreur de mesure. Les valeurs présentées
7
Suivant la figure « pont de Wheastone » présentée en annexes, la tension à la sortie du pont de Wheatstone intégré au capteur présente une relation linéaire avec la contrainte mécanique que le capteur subit. Le capteur de forces est composé de jauges de contraintes montées en « pont complet 4 jauges» ce qui permet de limiter les variations de
- Résultat théorique
correspondent aux erreurs RMSE8. Les mesures s’effectuent au centre de la pédale puis selon six mesures suivant un cercle de 3cm de rayon (une mesure tous les 60°). Chaque zone étudiée est un cercle de 1cm de rayon.
Les erreurs obtenues sont présentées dans la Figure 10.
Figure 10 : Zone d’application de la force.
Erreur de mesure en fonction de la zone d’application de la force sur le plateau. Pédale droite avec fixation sur la manivelle côté gauche.
L’erreur maximale observée était inférieure à trois Newton ce qui permet de juger de la relative précision du système. Il existait cependant des disparités dans la précision des mesures en fonction du point d’application de la force sur le plateau. En effet, la mesure semble plus précise dans la partie médiane qu’à l’avant et à l’arrière de la pédale. Plus on se rapproche du centre du plateau plus on est précis. L’effort a lieu dans l’alignement de l’axe de transfert, ne subissant plus les déformations du plateau en téflon et réduisant les frottements liés au décentrage de l’effort. Dans la pratique, la majorité des forces exercées par un pied sur une pédale a lieu au dessus de l’axe de rotation de cette dernière ce qui correspond à la zone la plus précise de notre matériel. L’erreur de mesure dans la zone médiane où le cycliste effectue la majorité de son effort est de l’ordre du Newton (Soden et al. 1979; Hull et al. 1981).
3.1.2.3 Reproductibilité de la mesure de la pédale
Tests de fluage :
Y a-t-il une stabilité lors de la mesure effectuée sur la pédale pour une expérimentation d’une durée supérieure à 5 minutes ? La mesure d’une même charge de 9kg (88.2 N) durant 5 minutes montre une dérive du signal entraînant une augmentation de la mesure de 0,01N en deux minutes et de 0,03N en 5 minutes. Cela représente une augmentation de 0,04% du signal en 5 minutes.
Répétitions de la mesure :
La mesure répétée d’une même charge a-t-elle une influence sur la mesure ? L’objectif est d’estimer la fidélité du capteur. En d’autres termes, il s’agit d’estimer si, dans des conditions de mesures identiques, existe-t-il une dérive de la mesure ?
8
Après 20 mesures successives d’une même charge (9kg), le capteur présente une erreur moyenne de 0,4N. La mesure augmente de 0,5% en 20 essais.
La mesure est-elle altérée par l’extinction du système entre deux mêmes mesures ? Tous les participants n’étaient pas testés le même jour. Le but ici est de vérifier s’il existe une altération du signal suite à une réinitialisation du système. Nous avons effectué 10 mesures d’une même charge entrecoupées d’extinction de 10 secondes puis redémarrage du système. L’erreur de mesure est de -1,1N. Une étape de calibrage est donc nécessaire après chaque réinitialisation du système de mesure.
3.2 Evaluation dynamique 3.2.1 Données cinématiques
Figure 11 : Kinogramme du cycliste.
Kinogramme d’un cycliste en position assise durant un tour de manivelle.
Après quarante mesures d’une distance de 0,23m séparant les extrémités d’un solide indéformable en mouvement, l’erreur moyenne observée est de 7×10-4m. La précision a augmenté depuis les mesures effectuées par Richards sur une ancienne version du même système optoélectronique (RMSE 1,2×10-3m) (Richards 1999). Les données cinématiques permettent la découpe des différents cycles de pédalage ainsi que le calcul des différents angles articulaires. Nous en déduisons les positions, vitesses, accélérations linéaires et angulaires grâce à différents points remarquables repérés sur le sujet.
3.2.2 Données analogiques
Nous avons utilisé les données de l’ergocycle pour évaluer les mesures de la pédale instrumentée dans des conditions dynamiques. Au cours d’un cycle de pédalage, il existe au minimum deux instants où la pédale est alignée avec la manivelle (flèches Fig. 12.a). A ce moment précis, l’orientation de la force perpendiculaire à la pédale (Fp) est aussi perpendiculaire à la manivelle (Ft) et les deux forces Fp et Ft devraient avoir la même valeur. Fp est mesurée par le capteur de force intégré dans la pédale. Ft est déduite du moment exercé au niveau du pédalier (éq. 4)
0 2 4 6 8 2 4 Points remarquables : 1-Grand trochanter 2-Genou 3-Malléole externe 4-Arrière pédale 5-Axe pédale 6-Avant pédale 1 2 3 4 5 6
mesuré par l’ergocycle. L’angle formé entre l’axe antéropostérieur de la pédale et l’horizontal est obtenu grâce au système opto-électronique déterminant les coordonnées de marqueurs placés sur le plateau de contact (fig. 5 élément f). La figure 12b permet de repérer plus facilement à quel instant du cycle de pédalage la pédale et la manivelle forment le même angle et sont donc alignées.
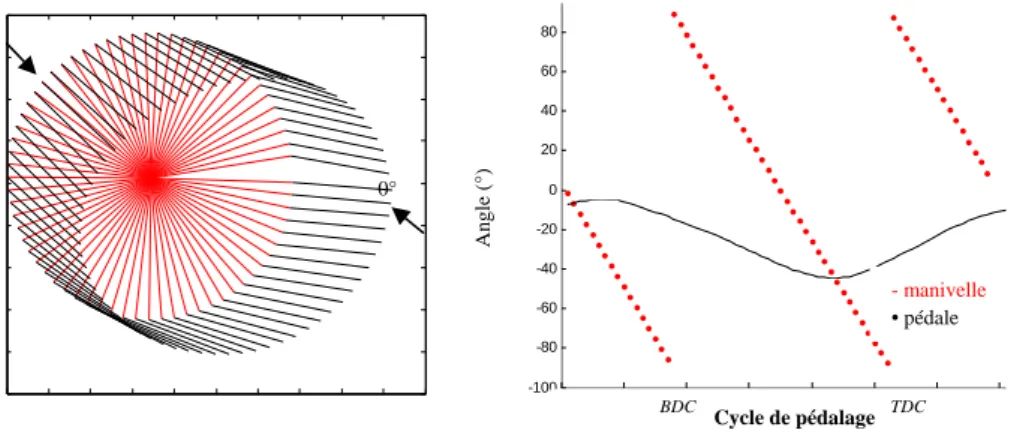
Figure 12 : Kinogramme de la manivelle
a)Kinogramme de la manivelle et de la pédale droite pour un cycle d’un sujet à 100W. Pour plus de clarté, seule la demi-pédale antérieure est représentée (noire).
b) Orientation de la manivelle et de la pédale par rapport à l’horizontale durant un cycle de pédalage permettant de repérer l’instant où les deux sont alignées (Flèches noires). TDC: pédale en position haute ; BDC : pédale en position basse.
Nous avons effectué 20 mesures à différentes puissances (100W, 200W, 300W, 400W) avec 4 sujets. Nous obtenons une différence de mesure de 1,8±2,1N.
3.3 Détermination des forces normales et tangentielles
a) b)
Figure 13: Forces appliquées sur la pédale.
Forces normales, tangentielles et résultantes durant un cycle de pédalage pour un sujet à 200W. BDC : Pédale en position basse. TDC : Pédale en position haute. Par convention, la numérotation des angles de la manivelle suit les règles de trigonométrie. Ainsi, la manivelle forme un angle de 0° lorsqu’elle est à l’horizontale orientée vers l’avant de l’ergocycle. Le sens positif est antihoraire. De ce fait, la manivelle droite dont la rotation est horaire, commence un tour à 360°,
0 10 20 30 40 0 60 0 -100 -80 -60 -40 -20 0 20 40 60 80 360 320 280 240 200 160 120 80 40 0 -100 0 100 200 300 400 500 Ft Fn R An g le (° ) - manivelle • pédale BDC Cycle de pédalage TDC 0° 0° TDC BDC BDC TDC 20° 340° 260° Position de la manivelle (°) F o rce (N ) 100N
Le système développé a permis de déterminer la résultante de forces appliquées sur la pédale. Il a aussi permis de déterminer les composantes de forces de cette résultante et notamment les forces propulsives utiles (Ft) et les forces non propulsives (Fn). La figure 13 présente un exemple des données qu’il est possible d’obtenir avec la pédale instrumentée. Cette représentation permet de repérer plusieurs phases caractéristiques d’un cycle de pédalage (Les justifications théoriques sont traitées en détail dans le chapitre suivant):
La valeur de Ft permet de déterminer la phase propulsive du cycle. Plus Ft est important, plus le moment au niveau du pédalier est important. Dans cet exemple, Ft est maximal quelques degrés avant le passage à l’horizontale de la manivelle.
Fs permet de quantifier les forces non propulsives appliquées sur la pédale. Ainsi, plus Fs est proche de 0, plus la propulsion est efficace car la part de forces inutiles appliquées sur la pédale est très faible (Fig.13a). Ainsi, l’efficacité de la propulsion est maximale lorsque Ft et R sont confondus (10° Fig.13b). Pour le cycle représenté, l’efficacité des la propulsion est maximal durant deux phases. Une première fois durant la remontée de la pédale (190°->150° Fig.13a) et une seconde fois 10° avant le passage à l’horizontale de la manivelle en phase descendante. Nous pouvons de plus remarquer que la résultante des forces appliquées maximale (350° Fig.13a) n’est pas synchronisée avec la phase où l’orientation des forces est optimale (10° Fig.13b).
La phase où Ft est négatif (270°->130° Fig.13a) correspond à une phase anti-propulsive. Dans cette situation, l’effort sur la pédale freine la rotation de la manivelle.
4 Discussion
4.1 Cinématique
La précision des données cinématiques mesurées est comparable à ce qui a été évalué dans la littérature. Nous avons montré que le système utilisé dans notre étude était plus précis que l’ancienne version testée par Richards (Richards 1999). Les évolutions technologiques rendent difficile la comparaison des précisions entre des systèmes de générations différentes. Cependant, les résultats obtenus montrent une réelle volonté des constructeurs de créer du matériel toujours plus performant et précis (erreur moyenne de 7×10-4m versus 1,2×10-3m pour Richards). La multiplication du nombre de caméras infrarouges permet aussi de réduire la perte de signal liée aux mouvements du sujet. Il en résulte une augmentation de la précision. Le nombre de caméras employées ici (8) est adapté au type de mouvement étudié ainsi que la précision recherchée.
4.2 Cinétique
Les erreurs de mesures cinétiques de la pédale sont comparables avec celles obtenues par Boyd ou Stapelfeldt (Boyd et al. 1996; Stapelfeldt et al. 2007). La qualité du signal dépend en grande partie de la qualité du capteur de force et de l’amplificateur. Notre système est plus précis en comparaison avec d’autres matériels utilisant le même type de méthode (RMSE de 1N contre 2,8N pour Boyd (Boyd et al. 1996), 8N pour Stone (Stone et al. 1993), 3,8N pour Ruby (Ruby et
al. 1993)). En dynamique, la précision est légèrement moins bonne qu’en statique car la mesure combine l’ensemble des imprécisions des systèmes d’analyse cinématiques et cinétiques. En effet, il prend en compte les imprécisions de mesures de l’ergocycle, de la pédale et du système optoélectronique.
Comparé aux études de références pour la mesure des efforts appliqués sur la selle et le guidon (Stone 1990; Stone et al. 1995) , nos tests montrent une précision du guidon 7 fois plus importante et 3 fois plus pour la selle. L’évolution technologique des jauges de contraintes peut expliquer cette amélioration de la précision.
4.3 Discussion générale
Malgré la précision du matériel (de l’ordre du Newton), il faut cependant discuter des contraintes liées à l’utilisation de pédales instrumentées.
La masse de l’engin est un facteur difficilement minimisable. Bien que nous restions dans la norme des systèmes déjà développés, il nous était impossible de conserver la masse d’une pédale traditionnelle. Ce surpoids suggère des problèmes inertiels cependant, la pédale se déplaçait à une vitesse relativement stable (fréquence de pédalage fixe) ce qui limitait les accélérations et donc la création de forces non souhaitées.
Notre système ne permet pas de connaître le point d’application exact de la force sur la surface du plateau. Généralement, les efforts ont lieu au niveau de l’articulation metatarso-phalangienne au dessus de l’axe de rotation de la pédale (Genzling 1983; Gregor et al. 1994; Grappe 2005). Cela semble de bon augure car l’effort appliqué sur la pédale se fait dans la zone où la mesure de notre système est la plus précise. Les travaux réalisés ici ont utilisé ce matériel pour analyser le point d’interaction entre le pied et la pédale ce qui correspond à l’axe de rotation de cette dernière. Nous avons utilisé une interface à étrier et non automatique pour faciliter l’expérimentation auprès de cyclistes non compétiteurs. En effet l’utilisation de cales, plus précises lors du recueil de données, nécessite une technique de pédalage particulière ainsi que l’utilisation d’un matériel personnel. L’étude du pédalage que nous tentons d’effectuer ne doit pas être influencée par les acquis techniques ou par une posture stéréotypée (Hug et al. 2008). Ce sont pour ces raisons que nous avons utilisé des cyclistes non compétiteurs.
Le système ne mesure pas les efforts medio-latéraux du cycliste (selon l’axe de rotation de la pédale). Nous sommes donc dans l’impossibilité de faire une étude en trois dimensions des efforts appliqués. Cependant, en accord avec Boyd, (Boyd et al. 1996) nous pouvons raisonnablement considérer que cette force medio-latérale est minime tout en étant proportionnelle aux forces exercées dans les deux autres dimensions (Ft et Fn).
Bien que cela ne soit pas significatif, le redémarrage du système a une influence sur la mesure des données. L’erreur moyenne augmente avec le nombre de réinitialisation atteignant plus de 1 Newton pour 10 répétitions. Un calibrage semble être une étape inévitable à chaque démarrage pour garantir des données de qualités.
5 Conclusion
Le matériel développé répond à nos besoins en termes de précision et d’aisance de manipulation. Cette pédale instrumentée permet d’obtenir des données nécessaires à une analyse du pédalage. L’originalité du système développé tient dans la complémentarité cinétique/cinématique, l’interaction entre un simple capteur de force unidirectionnel et un système optoélectronique. L’utilisation d’une selle et d’un guidon instrumentés permet de compléter le champ d’investigation. Pour garantir la fiabilité des résultats, les procédures d’utilisation développées en parallèle doivent être respectées rigoureusement.