HAL Id: dumas-01835623
https://dumas.ccsd.cnrs.fr/dumas-01835623
Submitted on 11 Jul 2018HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
densification du réseau pour l’étude de la troposphère
par tomographie
Raphaël Longechamp
To cite this version:
Raphaël Longechamp. Optimisation, validation du logiciel TSAAR et densification du réseau pour l’étude de la troposphère par tomographie. Sciences de l’ingénieur [physics]. 2017. �dumas-01835623�
ECOLE SUPERIEURE DES GEOMETRES ET TOPOGRAPHES ___________________
MEMOIRE
Présenté en vue d'obtenir
Le DIPLOME D'INGENIEUR CNAM
SPECIALITE : Géomètre et Topographe
par
Raphaël LONGECHAMP
___________________
Optimisation, validation du logiciel TSAAR et densification du réseau pour
l'étude de la troposphère par tomographie
Soutenu le 30 juin 2017
_________________ JURY
PRESIDENT : M. Jérôme VERDUN
MEMBRES : M. Joël VAN BAELEN Maître de Stage M. Frédéric DURAND Maître de Stage Mme Joëlle NICOLAS-DUROY Professeur Référent M. Laurent MOREL Co-Encadrant
Remerciements
Pour toute l'aide reçue tout au long de ce TFE, je tiens à remercier un certain nombre de personnes et plus particulièrement,
Mes maîtres de stage, Monsieur Durand Frédéric, pour sa bonne humeur, sa disponibilité et ses encouragements tout au long de mon travail. Monsieur Van Baelen Joël, pour son accompagnement et son analyse malgré la distance. Ses conseils furent très importants que ce soit au niveau de l'analyse des résultats et au moment de la rédaction,
Monsieur Morel Laurent pour son soutien, son aide régulière et ses remarques constructives qui m'ont permis d'avancer rapidement et de ne pas être bloqué sur un point,
Monsieur Durand Stéphane pour son aide précieuse tout au long de mon travail sur l'aspect mathématique et méthodologique des recherches,
Les personnes travaillant au LaMP1 qui m'ont accueilli lors de mon séjour à Clermont-Ferrand et plus particulièrement Mme Banson Sandra avec qui j'ai appris à utiliser le modèle Era-Interim,
Ma professeur référente, Mme Duroy-Nicolas Joëlle pour ces remarques intéressantes et intelligentes pour améliorer mon mémoire,
Les membres de la T0 : Clyde pour ses blagues vaseuses, Alexis et Abdel pour avoir participés aux parties de baby-foot, Steven et Kevin pour les moments sympathiques, Jordan et Charlotte pour l'ambiance bretonne et Ratana pour ses compétences en informatique qui m'ont été fort utiles.
Sigles et Acronymes
AFWA : Air Force Weather Agency ARB : Assistant Recherche Bénévole
CNAM : Consevatoire National des Arts et Métiers
ECMWF : European Center for Medium-range Weather Forecasts ESGT : École Supérieure des Géomètres et Topographes
EUREF : Eureopean Reference
FAA : Federal Aviation Administration FSL : Forecast Systems Laboratory
GAMIT : Global positioning system At Massachussetts Institute of Technology GeF : Géomatique et Foncier
GFS : Global Forecast System
GLONASS : GLObalnaya NAvigatsionnaya Spournikovaya Sistema GMF : Global Mapping Function
GNSS : Global Navigation Satellite System GPS : Global Positionning System
IFS : Integrated Forecasting System
IRM : Imagerie par Résonnance Magnétique
IRNSS : Indian Regional Navigation Satellite System IWV : Integrated Waper Vapour
LaMP : Laboratoire de Météorologie Physique NCAR : National Center for Atmospheric Research NCEP : National Centers for Environmental Prediction NMF : Niell Mapping Functions Niell
NRL : Naval Research Laboratory OU : Oklahoma University
QZSS : Quasi-Zenith Satellite System
RINEX : Receiver INdependant Exchange Format SHD : Slant Hydrostatic Delay
SIWV : Slant Integrated Water Vapour STD : Slant Total Delay
SVD : Singular Value Decomposition SWD : Slant Wet Delay
TFE : Travail de Fin d'Etude
TSAAR : Tomography Software for wAter vApour Retrieval TSVD : Truncated Singular Value Decomposition
VMF1 : Vienna Mapping Function 1 VZHD : Vienna Zenith Hydrostatic Delay WRF : Weather Research and Forecasting model
WUELS : Wroclaw University of Environmental and Life Sciences ZHD : Zenith Hydrostatic Delay
ZHmD : Zenith Hydrometeors Delay ZTD : Zenith Total Delay
Sommaire
Remerciements ... 3
Sigles et Acronymes ... 4
Sommaire ... 6
Introduction ... 8
I] Principes théoriques et notions de tomographie appliquées au GNSS... 9
I.1. L'atmosphère et les mesures GNSS ... 9
I.1.1. L'atmosphère : Généralités ... 9
I.1.2. Mise en équation des erreurs atmosphériques dans la mesure GNSS ... 10
I.2. Retard troposphérique ... 13
I.2.1. Les composantes du retard troposphérique ... 13
I.2.2. Fonctions de projection et gradients horizontaux ... 14
I.3. Tomographie appliquée au GNSS ... 16
I.3.1. Principe théorique de la tomographie ... 16
I.3.2. Integrated Water Vapour (IWV) ... 17
I.3.3. Slant Integrated Water Vapour (SIWV) ... 18
I.3.4. Résolution du problème inverse par inversion tomographique ... 19
II] Mise en Œuvre du réseau au Mans et de la chaîne de traitement ... 21
II.1. Les stations du réseau ... 21
II.1.1. Remise en place de stations ... 21
II.1.2. Nouvelles stations du réseau ... 21
II.2. Chaîne de traitement ... 24
II.2.1. Traitement GAMIT ... 24
II.2.2. Logiciel TSAAR ... 25
a) Structure du logiciel TSAAR ... 26
b) Initialisation des données ... 28
c) L'inversion tomographique ... 29
III] Optimisation et analyses du logiciel TSAAR ... 31
III.1. Optimisation du logiciel TSAAR ... 31
III.1.1. Initialisation avec des données météorologiques ... 31
III.1.2. Surestimation du logiciel TSAAR ... 33
a) Calcul de décomposition des rais ... 34
b) La prise en compte de la longueur des rais dans les voxels... 35
III.2. La sensibilité aux données en entrée de l'inversion tomographique ... 37
III.2.2. Sensibilité aux valeurs initiales choisies ... 39
III.3. Contrôle des résultats par le modèle Era-Interim ... 43
III.3.1. Comparaison des IWV ... 43
III.3.2. Comparaison de la quantité de vapeur d'eau ... 44
IV] Campagne Tomomans : un nouveau réseau ... 47
IV.1. Apport d'une station par voxel ... 47
IV.2. Apport d'un réseau de 3x3 voxels ... 49
Conclusion ... 50
Perspectives... 51
Bibliographie... 52
Table des figure ... 55
Introduction
La vapeur d'eau contenue dans l'atmosphère est un élément important et compliqué à prendre en compte lors de mesures météorologiques car elle varie rapidement et fortement dans le temps et dans l'espace. Cette information est pourtant essentielle en météorologie pour les prévisions. Des instruments sont capables de mesurer cette quantité comme par exemple un radiosondage mais simplement à un instant t donné en un lieu précis. De plus, c'est une technique très coûteuse, il est donc impossible d'utiliser cet outil très souvent. L'utilisation de modèles météorologiques peut être une bonne méthode mais leur disponibilité et leur résolution est encore un frein pour une finesse locale. La meilleure alternative trouvée jusqu'alors est l'utilisation du GNSS (Global Navigation Satellite System).
En effet, le GNSS est en premier lieu un outil de positionnement géodésique et de déformation géodynamique. Cette technique s'est développée durant ces deux dernières décennies et, lors des mesures, il est possible d'estimer l'humidité contenue dans l'atmosphère. Avec le nombre de satellites grandissant et en densifiant un réseau de stations au sol, cela apporterait des mesures supplémentaires sur l'humidité. Avec un traitement des données adapté et un processus rapide, c'est une technique alternative pour répondre à ce type de besoin.
Pour cela, le GeF (Laboratoire Géomatique et Foncier) et le LaMP (Laboratoire de Météorologie Physique) ont décidé depuis plusieurs années d'expérimenter ce type de recherches sur le secteur de la ville du Mans. Le but est de créer un réseau de stations dense pour obtenir cette information d'humidité dans l'atmosphère et par une chaîne de traitement définie utilisant la tomographie restituer le champ 3D de la vapeur d'eau dans l'atmosphère.
Ainsi ce TFE (Travail de Fin d'Études) s'inscrit dans ce projet avec un réseau de stations en place et une chaîne de traitement établie et vient juste après le TFE d'Olivier Le Coz (2015). Ce TFE a plusieurs objectifs, le premier est de densifier le réseau déjà installé pour augmenter le nombre de mesures et apprécier cet apport. Le deuxième objectif est de repérer d'éventuels disfonctionnements dans la chaîne de calcul et de les mettre en avant. Le dernier objectif est d'améliorer la chaîne de traitement utilisée pour améliorer les résultats et valider ces derniers.
Ce rapport sera en quatre temps. Dans la première partie, nous expliquerons les bases de la mesure GNSS, les éléments en jeu ainsi que la théorie de la tomographie appliquée au GNSS. Tout cela dans l'objectif de bien comprendre les différents procédés utilisés tout au long de ce projet.
Dans un 2ème temps, nous reviendrons sur la densification du réseau avec la recherche de sites pour les nouvelles stations mais aussi sur l'ensemble de la chaîne de traitement et les étapes indispensables à la compréhension de la chaîne et les améliorations faites à celle-ci.
Dans un 3ème temps, nous exposerons les résultats des différents tests effectués grâce aux améliorations et conclurons sur leurs apports ou non. Des tests sur différentes parties de la chaîne de traitement ont été réalisés pour rendre compte de sa qualité et surtout sur les résultats. Dans un 4ème temps, nous analyserons les résultats grâce au nouveau réseau mis en place. Pour terminer, nous nous efforcerons de proposer des solutions pour améliorer à nouveau cette chaîne de traitement et d'éventuelles recommandations sur son utilisation.
I] Principes théoriques et notions de tomographie
appliquées au GNSS
Le positionnement GNSS est aujourd'hui utilisé dans de nombreux domaines, le plus connu étant certainement le GPS intégré dans nos voitures, mais pas seulement. Il est utilisé également mais de manière plus précise par les géomètres pour le géoréférencement de levés, dans le domaine de la géophysique, de l'agriculture pour le pilotage d'engin à distance, de la météorologie et bien d'autres…
Néanmoins toutes les mesures comportent des erreurs dues au matériel utilisé ou à l'environnement. Pour les mesures de positionnement, il existe différentes sources d'erreurs provenant du récepteur, du satellite et notamment à cause de la traversée de l'atmosphère. Cette partie revient donc sur ces différentes erreurs qui sont importantes à comprendre dans le bon déroulement de ce projet. Ce dernier, et son lien avec les conditions météorologiques, sera expliqué en théorie dans cette partie.
I.1. L'atmosphère et les mesures GNSS
I.1.1. L'atmosphère : Généralités
L'atmosphère est une source importante d'erreurs lors de mesures de positionnement par GNSS. En effet le signal entre le satellite et le récepteur GNSS se propage dans le vide à la vitesse de la lumière puis dans l'air. Au contact de ce dernier, le signal n'est plus à la vitesse de la lumière dans le vide: ce phénomène est appelé réfraction. D'autant plus que l'atmosphère est composée de plusieurs couches réparties sur 800 km d'altitudes avec des propriétés physiques différentes, donc la réfraction peut varier selon ces couches.
En effet, cette réfraction est différente suivant deux couches : l'ionosphère et la troposphère (Voir Figure 1). Ce sont ces deux réfractions qui vont créer un retard de l'ordre de quelques nanosecondes sur le signal entre le satellite et le récepteur. Ce retard est traduit physiquement par une erreur sur la distance satellite-récepteur.
Figure 1 : Schéma du retard du signal satellite-récepteur dû à la traversée de l'atmosphère. Source : Champollion (2005).
L'ionosphère est la couche la plus haute de l'atmosphère, elle varie de 60 à 800 km d'altitude. Cette couche est particulière car elle est ionisée par les rayons solaires. L'erreur sur la distance satellite-récepteur peut varier de 1 à 50 m [@reflexions.ulg2]. La troposphère est la couche de l'atmosphère la plus basse, elle s'étend donc de la surface de la Terre jusqu'à 8 à 15 km d'altitude selon respectivement au pôle ou à l'équateur. Cette couche représente 75 % de la masse de l'atmosphère et contient 99% de la vapeur d'eau de celle-ci. Cette vapeur d'eau représente 12 000 milliards de tonnes [@astrosurf3]. L'erreur sur la distance satellite-récepteur due à cette couche est plus petite et plus stable puisqu'elle est d'environ 2.4 m excepté pour sa composante humide qui est développée dans la partie I.2.1.
I.1.2. Mise en équation des erreurs atmosphériques dans la mesure GNSS
Lorsque l'on réalise une mesure de ce type, elle intervient entre un récepteur et un satellite. Pour être sûr de capter un satellite en chaque point de la Terre à n'importe quel moment, il faut au minimum 24 satellites. Un ensemble de satellites gravitant autour de la planète est appelé une constellation (Voir Figure 2).
Les Américains sont les premiers à avoir mis en place leur propre constellation de satellites avec le système appelé GPS (Global Positionning System) qui fut opérationnel en 1994. Les Russes ont suivi puisque le système GLONASS (GLObalnaya NAvigatsionnaya Spournikovaya Sistema) a commencé à être conçu à la même époque mais n'a été définitivement mis en service qu'en 2011. Le système européen Galileo est en cours de déploiement et devrait être complètement opérationnel d'ici 2020. Pour l'instant il peut être utilisé mais forcément combiné avec le système GLONASS et/ou GPS. Les Chinois ont également leur propre constellation opérationnelle appelé Beidou (ou Compass) [Morel, IG4 2016]. Ces quatre constellations sont mondiales donc destinées à tous les utilisateurs à savoir du particulier qui
2 Reflexions, le site de vulgarisation de l'Université de Liège (http://reflexions.ulg.ac.be/) 3 L'eau de l'atmosphère (www.astrosurf.com/)
Figure 2 : Exemple d'une constellation de satellites gravitant autour de la Terre Source : Champollion (2005)
utilise un navigateur GPS dans sa voiture au professionnel qui souhaite une grande précision. Il existe également deux autres systèmes mais qui sont eux locaux : le système japonais QZSS (Quasi-Zenith Satellite System) et le système indien IRNSS (Indian Regional Navigation Satellite System).
Il est à noter que dans le cadre de cette étude, c'est le logiciel GAMIT (Global positioning system At Massachussetts Institute of Technology) qui calcule la position des points et le contenu en vapeur d'eau. Il faut savoir qu'il ne prend en compte que la constellation GPS.
Lors d'une mesure entre un récepteur et un satellite, plusieurs erreurs sont à prendre en compte et des éléments dépendent du type de mesure (code ou phase). Lorsque l'on cherche à modéliser ces erreurs et ces éléments sous forme d'équation, on écrit ce qu'on appelle une équation d'observation [Seeber 2003]. Voici l'équation d'observation (1) de la mesure de phase entre un récepteur i et un satellite k :
λΔΦ𝑖𝑘 = ρ𝑖𝑘 + c.(dtk – dti) - λN𝑖𝑘 - λn𝑖𝑘 + Δρ𝑖𝑘 𝑡𝑟𝑜𝑝𝑜+ Δρ𝑖𝑘 𝑖𝑜𝑛𝑜 (1)
λ : longueur d'onde du signal, ΔΦ𝑖𝑘 : mesure de déphasage,
ρ𝑖𝑘 : distance géométrique entre le satellite et le récepteur, c : vitesse de la lumière dans le vide,
dtk : décalage d'horloge du satellite par rapport au temps GPS, dti : décalage d'horloge du récepteur par rapport au temps GPS,
N𝑖𝑘 : ambiguïté entière entre le récepteur i et le satellite k,
n𝑖𝑘 : nombre de cycles comptés par le récepteur depuis la première observation sur le satellite k,
Δρ𝑖𝑘 𝑡𝑟𝑜𝑝𝑜 : retard troposphérique, Δρ𝑖𝑘 𝑖𝑜𝑛𝑜 : retard ionosphérique.
La distance géométrique est établie à partir des coordonnées du satellite qui sont connues à chaque instant grâce aux orbites précises et les coordonnées du récepteur. Ces coordonnées sont inconnues lors du calcul, il est donc nécessaire d'utiliser des valeurs approchées pour pouvoir enclencher un processus itératif.
Le terme (dtk – dti) est appelé le décalage d'horloge car les horloges du récepteur et du
satellite ne sont pas exactement synchronisées et dérivent dans le temps. Il est donc important d'avoir une très bonne précision de celles-ci car par exemple une désynchronisation des horloges d'1µs équivaut à (10-6s)x(3.108m/s) = 300m d'erreur sur la distance finale. Le retard ionosphérique peut être éliminé en combinant deux fréquences (appelé iono free, L3).
Une seule mesure sur un seul satellite ne permet pas de calculer les coordonnées précises du récepteur. Il est indispensable d'en avoir quatre au minimum pour déterminer les inconnues qui sont les trois composantes des coordonnées du récepteur et le décalage d'horloge.
Il existe plusieurs méthodes de positionnement : le positionnement absolu et le positionnement différentiel (Voir Figure 3).
Avec la méthode du positionnement absolue, il n'y a besoin que d'un seul récepteur. Avec cette méthode, il faut une bonne connaissance des erreurs pour avoir une bonne précision sur les coordonnées ce qui n'est pas toujours évident. La méthode utilisée dans le logiciel GAMIT est la méthode différentielle. Cette méthode rajoute une station de référence qui observe simultanément les mêmes satellites, le vecteur entre le récepteur et la station de référence se nomme la ligne de base (Voir Figure 3).
Lorsque la station de référence et le récepteur observent simultanément le même satellite k, on peut écrire deux fois l'équation d'observation (1). En soustrayant ces deux équations, on obtient ce qu'on appelle une simple différence sur le satellite k. On peut écrire une autre simple différence puisque le récepteur et la station de référence observent en même temps le même satellite l. En soustrayant ces deux simples différences, on élimine les termes d'horloges et on obtient des doubles différences avec un récepteur i, une station de référence j et les deux satellites k, l [Morel, IG4 2016]. On l'écrit communément :
𝛻𝛥Φ𝑖,𝑗𝑘,𝑙 = 𝛻𝛥𝜌𝑖,𝑗𝑘,𝑙 + 𝑇𝑖,𝑗𝑘,𝑙 - 𝐼𝑖,𝑗𝑘,𝑙+ 𝛻𝛥𝑁𝑖,𝑗𝑘,𝑙 (2) Récepteur
Figure 3 : Méthode de positionnement par GNSS : en haut méthode absolue, en bas méthode différentielle [Modifié]
𝛻𝛥Φ𝑖,𝑗 : double différence sur la mesure de phase, 𝛻𝛥𝜌𝑖,𝑗𝑘,𝑙 : double différence sur la distance géométrique, 𝑇𝑖,𝑗𝑘,𝑙 : retard troposphérique,
𝐼𝑖,𝑗𝑘,𝑙 : retard ionosphérique,
𝛻𝛥𝑁𝑖,𝑗𝑘,𝑙 : double différence sur les ambiguïtés entières,
Le retard troposphérique est l'élément indispensable que l'on souhaite estimer car il contient l'essentiel de l'humidité. Trois contributions possédant différentes propriétés composent ce retard troposphérique.
I.2. Retard troposphérique
I.2.1. Les composantes du retard troposphérique
Ce retard troposphérique est de l'ordre de 2.4 m au zénith (ZTD : Zenith Total Delay) comme vu dans la partie précédente. Néanmoins, il peut être décomposé en plusieurs parties qui sont plus ou moins prévisibles et plus ou moins importantes :
Partie hydrostatique : au zénith, on l'appelle le ZHD (Zenith Hydrostatic Delay). C'est la contribution la plus importante car elle représente 90 % du retard troposphérique total. Elle est également la mieux connue donc la mieux modélisée. Cette contribution est directement corrélée avec la température, l'altitude et la pression, elle varie peu dans le temps et l'espace, elle est donc assez prévisible.
Partie humide : au zénith, le ZWD (Zenith Wet Delay). Cette contribution humide tient compte de la vapeur d'eau présente et représente 2 à 20 % du retard troposphérique total. Elle est beaucoup plus variable spatialement et temporellement, elle est donc moins facile à prévoir.
Partie des hydrométéores : on peut l'appeler ZHmD (Zenith Hydrometeors Delay). C'est la contribution la plus faible car elle ne représente qu'environ 0 à 1 % du retard total. Les hydrométéores sont des particules d'eau condensées en gouttes, nuages, cristallisées en glace ou en neige. C'est ce qui forme la pluie, la neige, le brouillard… Cette contribution n'étant pas prise en compte dans le logiciel de calcul de ce projet, elle est confondue avec la partie humide.
On se retrouve ainsi en pratique avec :
ZTD = ZHD + ZWD (3)
Ce qui donne comme ordre de grandeur :
Contribution Valeur au zénith
Hydrostatique 2.2 m
Humide 5 à 50 cm
Hydrométéores jusqu'à 2.5 cm Tableau 1: Récapitulatif de la valeur au zénith des contributions au retard tropposphérique
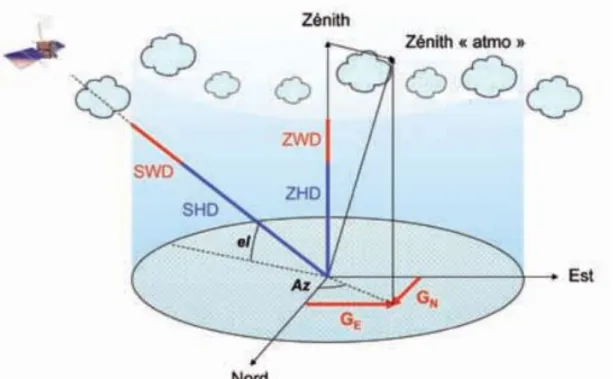
I.2.2. Fonctions de projection et gradients horizontaux
Jusqu'ici, on parle de retard au zénith mais, lors de mesures GNSS, les satellites ne sont pas au zénith mais dans une certaine direction avec un azimut et une élévation. Ce n'est donc pas le ZTD qui est déterminé comme le retard troposphérique dans l'équation (1) mais le STD (Slant Total Delay) qui est le retard troposphérique total suivant la direction du satellite. De la même façon que l'équation (3), il y a une contribution hydrostatique et une contribution humide
(Voir Figure 4).
STD = SHD + SWD (4)
STD : Slant Total Delay, retard troposphérique total suivant la direction du satellite,
SHD : Slant Hydrostatic Delay, contribution hydrostatique du retard suivant la direction du satellite,
SWD : Slant Wet Delay, contribution humide du retard suivant la direction du satellite.
On peut donc remplacer le terme Δρ𝑖𝑘 𝑡𝑟𝑜𝑝𝑜 de l'équation (1) par le terme STD. Cependant, il y aurait trop d'inconnues par rapport au nombre d'équations si l'on considérait un STD par satellite. Ainsi il n'est pas possible de déterminer directement ces STD. C'est pourquoi dans la pratique, grâce à des fonctions de projection appelées mapping functions, on passe du retard selon la pente (STD) au retard au zénith (ZTD), on dit que l'on projette le STD au zénith
(Voir Figure 4).
Il faut savoir que ces mapping functions ne prennent en compte que l'élévation du satellite, équation (5). De plus, il existe une mapping function pour chaque composante (hydrostatique et humide) qui est utilisé dans le logiciel de géodésie et de tomographie et qui est de la forme:
Figure 4 : Schéma des composantes des différents retards troposphériques et des gradients NS et EW
(Source : Modélisation des retards troposphériques pour les observations GPS et impacts sur l'estimation de la hauteur ellipsoïdale, Fund et al 2010)
mf = 1+ 𝑎 1+1+𝑐𝑏 sin(𝑒𝑙)+ 𝑎 sin(𝑒𝑙)+ 𝑏 sin(𝑒𝑙)+𝑐 (5)
a,b,c : coefficients déterminés de façon empirique, el : élévation du satellite.
Saastamoinen (1972) est un des premiers à avoir proposé les mapping functions. Depuis plusieurs ont été développées et améliorées mais les plus importantes sont :
- La Niell Mapping Function (NMF) : Niell (1996). Cette mapping function est basée sur des données de radiosondages sur 3 ans (1987, 1988, 1992) sur 26 sites à travers le monde [Brenot 2006].
- La Vienna Mapping Function 1 (VMF1) et la Global Mapping Function (GMF) datent de 2006. La VMF 1 est une grille de valeures et est issue de données des modèles de prévision de l'ECMWF (European Centre for Medium-range Weather Forecasts) [Park et al. 2016]. La détermination des coefficients est basée sur du ray-tracing et les profils moyens mensuels des données d'ECMWF sur une année. C'est la grille la plus précise à l'heure actuelle car elle a une résolution de 2.5°x2° et est mise à jour toutes les six heures [Desjardins 2014].
- À l'inverse, la GMF n'est pas une grille mais des coefficients empiriques qui ne dépendent que de la localisation du récepteur et du jour de l'année. Elle est donc facile à mettre en œuvre et c'est d'ailleurs celle qui est utilisée dans le logiciel TSAAR (Tomography Software for wAter Vapour Retrieval).
En prenant en compte ces mapping functions, le STD peut s'écrire : STD = SHD + SWD
STD = ZHD.mfH + ZWD.mfW (6)
mfH : mapping function hydrostatique,
mfW : mapping function humide.
Par ailleurs, la troposphère est anisotrope, c'est-à-dire que les propriétés sont différentes selon la direction du signal. C'est pourquoi il est indispensable d'ajouter un élément à l'équation (6) qui est le gradient horizontal [Fund et al. 2010]. Ce gradient horizontal est décomposé en deux : un gradient horizontal dans la direction Nord-Sud (gradNS) et un dans le sens Est-Ouest (gradEW) (Voir Figure 4). Il possède également une contribution hydrostatique et une contribution humide et chacun possède sa propre mapping function.
La mapping function des gradients horizontaux utilisée dans TSAAR est celle développée par Chen et Herring (1997) :
mfgrad =
1
q : constante déterminée par Chen et Herring (1997). Ainsi on peut écrire le STD :
STD = SHD + SWD Avec,
SHD = ZHD x mfH(el) + [gradNSH x sin(az) + grad EWH x cos(az)] x mfgradH(el) (8)
SWD = ZWD x mfW(el) + [gradNSW x sin(az) + grad EWW x cos(az)] x mfgradW(el) (9)
gradNSH, gradNSW : gradients Nord-Sud hydrostatique et humide,
gradEWH, gradEWW : gradients Est-Ouest hydrostatiques et humide,
mfgradH, mfgradW : mapping function des gradients hydrostatique et humide,
az : azimut du satellite.
On a vu que grâce à ces mapping functions, gradients horizontaux et mapping functions de gradients horizontaux, il est possible de reprojeter le STD au zénith (ZTD). Cependant, ce qui nous intéresse est bien le ZWD qui est la composante humide du ZTD. Dans la pratique, les contributions hydrostatiques et humide ne sont pas séparables lors des mesures GNSS, c'est pourquoi il faut connaître l'une de ces deux contributions. Comme précisé plus haut, le ZWD est assez hétérogène dans le temps et dans l'espace alors que le ZHD, lui, est beaucoup plus corrélé à l'altitude, au lieu et ne varie que très peu dans le temps. Par conséquent celui-ci est beaucoup plus prévisible.
Des formules ont donc été développées et permettent d'obtenir ce ZHD sur la base de l'altitude et des mesures précises de température et de pression à chaque couche d'altitude. Cependant, ce n'est pas toujours facile à mettre en place et donc très onéreux. Pour pallier à cela, il existe des modèles météorologiques 2D et 3D. Le modèle de Saastamoinen est plus intéressant car il est en 2D et il n'a besoin que de la pression au sol, la latitude du lieu et l'altitude du récepteur.
Un modèle 3D est un modèle qui intègre des profils verticaux de températures et de pressions. C'est notamment le cas de la VZHD (Vienna ZHD) qui a été mise en service en 2006 par l'Université Technologique de Vienne. Ce modèle utilise également les données disponibles de l'ECMWF. Ce modèle est utilisé dans cette étude pour le traitement GAMIT des données GNSS.
Les mapping functions utilisées dans ce projet sont la VMF1 et celle de Chen et Herring dans le logiciel GAMIT et TSAAR utilise la GMF et celle de Chen et Herring.
I.3. Tomographie appliquée au GNSS
I.3.1. Principe théorique de la tomographie
La tomographie est une méthode pour reconstruire un objet en trois dimensions grâce à des mesures externes (Voir Figure 5). Cette technique est beaucoup utilisée en imagerie médicale notamment pour une IRM (Imagerie par Résonnance Magnétique), en géophysique, mécanique des matériaux et autres. Par exemple dans le cas de l'imagerie, grâce à des mesures effectuées à l'extérieur du corps, il est possible de reconstituer en 3D une partie du corps grâce à la propriété de celui-ci (donnée anatomique dans le cas de l'IRM).
D'un point de vue mathématique, cette technique se déroule en deux étapes. La première nécessite d'avoir un modèle direct qui décrit le mieux ce qui est mesuré. Ensuite un modèle inverse pour retrouver la distribution tridimensionnelle de ce qui est recherché sur la base du modèle direct.
On peut tout à fait assimiler cette méthode de la tomographie aux mesures GNSS pour la distribution tridimensionnelle de la vapeur d'eau. Les IWV (Integrated Water Vapour) et les SIWV (Slant Integrated Water Vapour) (décrits dans le paragraphe I.3.2 et I.3.3) peuvent être assimilés au modèle direct (S1, S2 et P de la Figure 5) puis le résultat du problème inverse dans notre étude est la distribution de la quantité de vapeur d'eau dans la troposphère.
À partir du logiciel GAMIT, les ZWD sont calculés mais ce ne sont qu'un retard troposphérique au zénith du point considéré. Un retard troposphérique est exprimé en mètres mais ce qui nous intéresse dans cette étude est la densité de vapeur d'eau. Il faut convertir ces ZWD en quantité de vapeur d'eau au zénith appelé IWV pour ensuite reprojeter ces derniers suivant la pente du satellite, ce sont les SIWV.
I.3.2. Integrated Water Vapour (IWV)
L'Integrated Water Vapour (IWV) désigne la quantité de vapeur d'eau au-dessus d'un point donné. Il existe un lien de proportionnalité entre ces deux quantités l'IWV et le ZWD. Ce facteur de proportionnalité Ƙ varie selon le lieu où l'on se trouve et fait l'objet de recherches pour avoir une valeur plus précise. Les premiers à proposer un facteur de passage entre le ZWD et l'IWV sont Askne et Nordius (1987) qui est :
Ƙ = 10-8 𝜌R
v[(k3/Tm) +k'2] (10)
𝜌 : la densité de l'eau,
Rv : la constante spécifique de la vapeur d'eau = 461.524 J.kg-1.K-1,
k'2, k3 : constantes de la réfraction atmosphérique valant respectivement 22 K.mbar-1 et
3.7.10-5K2.mbar-1,
Tm : la température moyenne le long du profil,
Figure 5 : Schéma du principe théorique de la tomographie (Source : wikipedia.fr/)
Puis Bevis et al. (1992) ont établi un lien entre Tm et la température au sol Ts :
Tm = 70.2 + 0.72XTs (11)
Puis Emardson & Derks (2000) ont trouvé plusieurs formules : un modèle simplifié, un modèle polynomial, un modèle annuel et un modèle hybride. Celui utilisé dans le logiciel TSAAR est le modèle polynomial. Sa formule n'utilise que des coefficients déterminés de façon empirique, la température le long du profil et la température au sol. Pour déterminer ces coefficients, ces chercheurs se sont basés sur des radiosondages sur 38 sites en Europe entre 1989 et 1997. Ils ont divisé l'Europe en quatre régions (Baltique, Centrale, Atlantique, Méditerranéen) car ces coefficients varient légèrement selon la région. [Emardson & Derks 2000]. Notre projet se situe dans la région centrale:
Ƙ = a
0+ a
1x(T
s– T
m) + a
2x(T
s– T
m)
2 (12) a0 : 6.390a1 : -0.0175
a2 : 0.000 075
Tm : Température le long du profil vertical : 283.17 K
Ts : Température au sol en Kelvin
Ces coefficients ont été mis à jour grâce à une étude menée par des scientifiques hongrois en 2011 [Rozsa et al. 2012] et sont adoptés dans TSAAR.
De cette façon, ce lien de proportionnalité s'écrit :
IWV = Ƙ x ZWD (13)
Comme il y a un rapport de proportionnalité, on sait que 6 mm de ZWD équivaut à environ 1 kg.m-2 d'IWV. La précision du ZWD à la sortie de GAMIT est de 3-4 mm, aussi la précision de l'IWV est de 1 kg.m-2[Veremes 2016].
I.3.3. Slant Integrated Water Vapour (SIWV)
Le SIWV, comme l'IWV, représente la quantité de vapeur mais selon la direction récepteur-satellite appelée un rai (Voir Figure 6). L'intérêt de procéder ainsi est de connaître la quantité de vapeur d'eau dans plusieurs directions pour pouvoir, grâce à la tomographie, restituer le champ 3D de vapeur d'eau. Pour cela, il faut les reprojeter à nouveau en utilisant les mapping functions, les gradients horizontaux et les mappings functions des gradients horizontaux (équation (15)). Utiliser une nouvelle fois des mapping functions et des gradients dégrade la précision des SIWV, on arrive en moyenne à une précision de 6 kg/m² [Wijaya et Brunner 2011].
De la même façon que pour le passage du ZWD à l'IWV, on peut passer du SWD au SIWV par le même coefficient de proportionnalité. On a donc :
On a vu avec l'équation (9) comment développer le SWD, on obtient alors :
SIWV = Ƙ x [ZWD x mfW(el) + [gradNSW x sin(az) + grad EWW x cos(az)] x mfgradW(el)] (15)
On a à présent le modèle direct énoncé dans le paragraphe I.3.1 avec les valeurs d'IWV et de SIWV. Il est important de savoir comment résoudre le problème inverse
I.3.4. Résolution du problème inverse par inversion tomographique
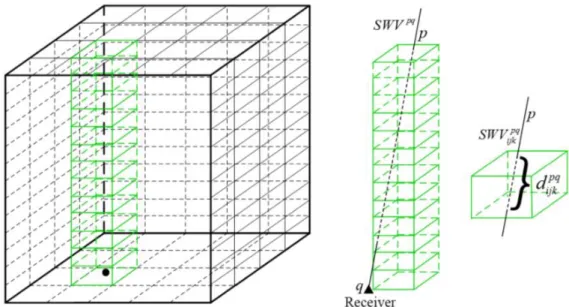
Le modèle direct étant maintenant connu, il est possible de résoudre le problème inverse. Pour poser ce problème sous forme mathématique, il faut tout d'abord discrétiser l'espace d'étude en voxels (Voir Figure 7). Les voxels sont des pixels en 3D qui ne forment pas systématiquement des cubes, les côtés peuvent être de différentes longueurs, tout dépend de ce que l'on souhaite représenter.
Ensuite il existe différentes méthodes pour résoudre cette inversion tomographique. La méthode utilisée dans le modèle TSAAR est la méthode des moindres carrés pondérés amortis [Reverdy 2008]. Cette méthode sera détaillée dans la partie II.2.2.c. D'autres logiciels ont été développés notamment à l'Institut royal d'Aéronomie Spatiale de Belgique (BIRA-IASB) qui utilise la méthode SVD (Singular Value Decomposition) couplée à des moindres carrés pondérés amortis. L'université WUELS (Wroclaw University of Environmental and Life Sciences) en Pologne utilise un filtre de Kalman couplé à la méthode SVD. L'université technique de Vienne a fait le choix de la méthode TSVD (Truncated Singular Value Decomposition) (méthode SVD légèrement modifiée) avec un ajustement par moindres carrés pondérés [Brenot et al. 2017].
Grâce à ces différentes méthodes, il est possible d'obtenir la quantité de vapeur d'eau contenue dans chaque voxel.
Pour conclure cette partie, on peut rappeler les grandeurs indispensables au bon déroulement d'un tel calcul :
Quantité Précision Source
ZWD 3-4 mm Fichier de sortie de GAMIT
IWV 1 kg.m-² Veremes (2016)
SIWV 6 kg.m-2 Wijaya et Brunner (2011) Tableau 2 : Récapitulatif de la précision des grandeurs utilisées
Les grands principes et les éléments nécessaires à n'importe quel projet tomographique faisant intervenir des mesures GNSS, dans l'objectif de déterminer la quantité de vapeur d'eau, ont été énoncés dans cette partie. Il sera présenté dans la partie suivante le réseau de stations utilisé pour cette campagne de mesure et la chaîne de traitement propre à ce TFE et ce projet.
Figure 7 : Schéma représentant un espace discrétisé en voxel (a), une colonne de voxel (b) et un voxel (c) (Source : Yao Y. B. et al. 2016)
II] Mise en Œuvre du réseau au Mans et de la chaîne de
traitement
Ce projet s'inscrit à la suite du TFE d'Olivier Le Coz (2015) avec des sites qui ont été choisis pour installer des stations GNSS autour du Mans. Un des apports de ce TFE est de rajouter des stations GNSS pour densifier le réseau afin d'avoir plus de mesures et pour augmenter le nombre de voxels au sol pour tenter d'avoir un meilleur résultat tomographique. J'ai participé à cette densification conjointement avec des élèves en ARB (Assistant Recherche Bénévole).
Dans ce TFE de 2015, la chaîne de traitement fut établie dans un premier temps avec le logiciel GAMIT pour calculer la position des stations et estimer les ZWD puis dans un second temps avec le logiciel TSAAR développé durant la thèse par Mathieu Reverdy (2008) pour résoudre l'inversion tomographique et obtenir la quantité de vapeur d'eau. Afin de garder un temps suffisant pour l'étude du code du logiciel TSAAR, le traitement GAMIT a été réalisé par mon maître de stage, mais il en sera mentionné dans ce rapport car cette partie est indispensable dans la chaîne de traitement.
II.1. Les stations du réseau
II.1.1.Remise en place de stations
Dans le TFE d'Olivier Le Coz (2015), cinq stations ont été utilisées et réparties de façon stratégique sur la région du Mans. Cette zone est très intéressante puisqu'elle offre déjà deux stations du RGP (Réseau GNSS Permanent) : MAN2 sur le toit de l'ESGT qui possède sa propre station météo et ARNA sur la commune d'Arnage. Les trois autres stations ont été disposées de façon à être bien réparties sur la zone du Mans, sur des sites disponibles et surtout sans masque. Les antennes et les récepteurs des trois autres stations ont été remises en place à l'occasion de ce TFE. La première se situe sur le toit du bâtiment des archives (ARCH) au centre de la ville du Mans, la deuxième sur un bâtiment du collège Pasteur sur la commune d'Yvré-l'Evèque (YVRE) (possédant une station météo) et la troisième sur un bâtiment communal sur la commune de Ruaudin (RUAU).
Les photos de ces cinq stations sont en Annexe 1.
II.1.2.Nouvelles stations du réseau
L'une des recommandations du TFE d'Olivier Le Coz (2015) était de densifier le réseau de stations GNSS dans le but d'avoir un meilleur rendu tomographique et d'avoir de meilleurs résultats. L'un des objectifs de ce TFE est de rajouter des stations pour augmenter la discrétisation de l'espace d'étude et augmenter le nombre de voxels. Comme précisé plus haut, cet objectif s'est mis en place en collaboration avec des ARB qui sont en IG4 à l'ESGT. Le but est de rechercher des nouveaux sites placés de façon intéressante par rapport aux stations déjà en place, c'est-à-dire qu'ils soient le plus possible au centre des voxels lorsque l'on discrétise l'espace d'étude. Ces ARB ont commencé leurs recherches bien avant le projet ce qui a permis
d'accélérer le côté administratif de l'installation. Puis dès le début du TFE, nous avons commencé à réinstallés les stations de 2015 ainsi que les nouvelles.
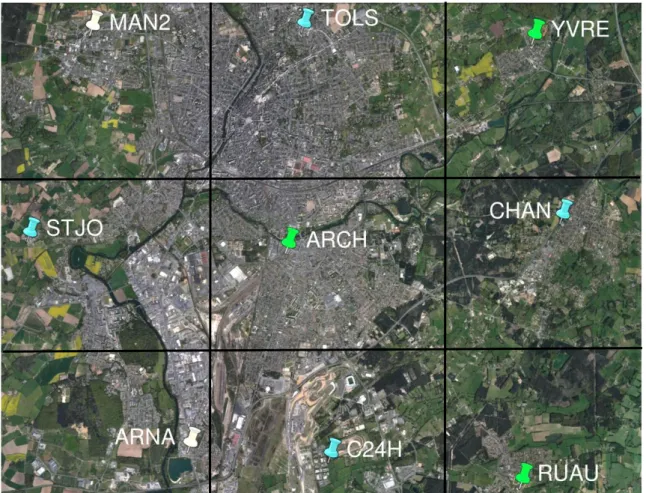
On peut voir sur la Figure 8 la répartition des stations du réseau. Elles sont placées afin d'obtenir un réseau de 3x3 voxels au sol avec une station au centre d'un voxel.
Pour discrétiser la zone d'étude en 3x3 voxels, quatre stations ont ainsi été rajoutées afin d'en avoir neuf au total. La première se situe sur le bâtiment du service informatique du circuit des 24H du Mans (C24H) (Voir Figure 11) et possède une station météo. Pour la deuxième station (CHAN), un site pérenne n'a pas pu être trouvé, la station a donc dû être placée sur trépied dans le champ d'un particulier (Voir Figure 9). Cette station se trouve donc entre une maison et un grand mur qui sépare ce champ, de la rocade du Mans. Il risque d'y avoir des masques mais nous n'avions pas le choix et nous avons privilégié un réseau complet. La troisième se situe sur le bâtiment du collège Tolstoï (TOLS) (Voir Figure 10) au Mans et la dernière sur la terrasse du lycée Saint-Joseph (STJO) (Voir Figure 12) sur la commune de Pruillé-Le-Chétif. Il y a également une particularité à noter sur les stations CHAN et C24H puisqu'elles fonctionnaient sur batterie et panneau solaire. Les mesures ont été réalisées simultanément du 7 avril au 1er mai 2017.
Il est résumé dans le Tableau 3 le matériel utilisé pour chaque site. Les mesures du nouveau réseau ont été réalisées durant la période du 7 avril au 1er mai 2017.
Figure 8 : Réseau des stations GNSS utilisées durant le projet, en blanc les stations du RGP (MAN2, ARNA), en vert les stations présentes en 2015 (ARCH, RUAU, YVRE), en bleu les nouvelles stations (C24H, CHAN, STJO, TOLS), en trait noir la discrétisation schématique 3x3 voxels au sol.
Station Lieu Type d'antenne Type de récepteur Station météo Mise en service
ARCH Archives Le Mans ASH700936 Leica GR25 - 2015
ARNA Arnage LEIAS10 GX1220+GNSS - RGP
C24H Circuit 24H Le Mans ASH701945-02 Leica GR25 PTU 300 2017
CHAN Sur trépied Changé ASH701945-02 Leica GR25 - 2017
MAN2 Le Mans ESGT TRM57971.00 Trimble NetR9 PTU 200 RGP
RUAU Batîment communal Ruaudin ASH701945-01 Leica GR25 - 2015
STJO Pruillé-Le-Chétif Lycée St-Joseph ASH701945-02 Trimble NetRS - 2017
TOLS Collège Tolstoï Le Mans ASH701945-02 Trimble NetRS - 2017
YVRE Collège Pasteur Yvré-l'Évèque ASH700936-02 Leica GR25 PTU 300 2015
Tableau 3 : Caractéristiques des stations utilisées durant le projet
Figure 11 : Station C24H sur le bâtiment du service informatique du circuit des 24H du Mans avec le panneau solaire et la station météo
Figure 10 : Antenne de la station TOLS sur le bâtiment du collège Tolstoï au Mans
Figure 9 : Station CHAN sur trépied sur la commune de Changé utilisant un panneau solaire
II.2. Chaîne de traitement
Pour obtenir le résultat final qui est la quantité de vapeur d'eau dans chaque voxel, deux logiciels se succèdent dans cette chaîne de traitement (Voir Figure 13) : le logiciel de traitement GNSS GAMIT qui calcule la position de chaque station et estime les ZWD, éléments de départ pour la tomographie. Le logiciel TSAAR qui réalise l'inversion tomographique à partir des ZWD des stations du réseau et qui retourne la quantité de vapeur d'eau dans chaque voxel au-dessus de la zone.
II.2.1.Traitement GAMIT
Il a été présenté dans la partie I.1.2 que le logiciel GAMIT utilise la méthode différentielle pour le calcul des stations. Pour cela il faut des stations de référence géodésique qui soient d'une part très éloignées de la zone d'étude pour que les paramètres troposphériques soient décorrelés des autres estimations et d'autre part dans toutes les directions pour une bonne mise en référence.
Étant dans la continuité du TFE d'Olivier Le Coz (2015) et pour des raisons pratiques nous avons repris les mêmes stations de référence pour ce traitement GAMIT (Voir Figure
14). Les critères d'éloignements et de directions sont respectés, de plus ce sont des stations dont Figure 12 : Antenne et récepteur de l'antenne STJO sur la terrasse du
lycée St-Joseph sur la commune de Pruillé-Le-Chétif
les coordonnées sont précises car ce sont des stations de l'EUREF (Eureopean Reference) [Le Coz 2015].
Il y a ainsi 8 stations qui ont été choisies pour réaliser cette mise en référence : Brest en France (BRST), Morpeth en Angleterre (MORP), Noto en Sicile (NOT1), sur l'archipel des Açores (PDEL), Qaqortoq au Groënland (QAQ1), Tromsoe en Norvège (TRO1), Villafranca en Espagne (VILL) et Zimmerwald en Suisse (ZIMM) (Voir Figure 14).
À partir des fichiers RINEX (Receiver INdependant Exchange Format) 24h, des RINEX météo et des orbites précises des satellites (Voir Figure 13), un premier traitement est lancé pour déterminer les coordonnées des stations puis un second pour déterminer les ZWD [Morel et al. 2014]. Le logiciel GAMIT détermine le ZHD a priori grâce à la Vienna ZHD (VZHD) et ensuite estime le paramètre ZWD par moindres carrés à 3-4 mm d'après les fichiers de sortie.
II.2.2.Logiciel TSAAR
Le logiciel TSAAR est un logiciel conçu lors de la thèse de Mathieu Reverdy (2008). Dix-sept programmes écris en langage Matlab s'enchaînent pour calculer l'inversion tomographique et obtenir en retour le champ 3D de vapeur d'eau sur la zone d'étude.
J'ai réalisé une analyse complète des codes du logiciel TSAAR afin de comprendre parfaitement les étapes successives pour les représenter (Voir Figure 15) et j'ai rédigé un tutoriel complet d'une vingtaine de pages pour expliquer dans le détail le fonctionnement de tous les programmes, les sous-programmes qu'utilise TSAAR ainsi que les précautions à prendre lors de son utilisation.
Figure 14 Stations choisies pour la mise en référence du traitement GAMIT avec en bleu, le site d'étude, en rouge les stations de référence, en vert les autres stations du réseau
Le logiciel TSAAR se décompose en une multitude d'étapes, des programmes mettent en forme les résultats sortis de GAMIT pour être plus facile à utiliser ensuite, d'autres calculent les résultats pré-tomographiques et d'autres les résultats tomographiques. Ces étapes sont décrites ci-après.
a) Structure du logiciel TSAAR
Pour calculer les résultats tomographiques ou les résultats pré-tomographiques, il faut mettre en forme les résultats sortis de GAMIT ou calculer les grandeurs nécessaires comme les IWV ou les SIWV. Les fichiers en sortie de GAMIT ne sont pas directement exploitables par un programme d'inversion tomographique d'où l'utilité de ces premiers programmes. Ce sont les losanges affichés en bleu (Voir Figure 15) qui extraient les données météo des résultats de GAMIT, (ZWD, ZHD, ZTD, gradNS, gradEW…), calculent les IWV, les SWD et ensuite les SIWV.
- Le programme "met_ptu2_zwd", extrait les différentes composantes (ZTD, ZWD, gradN…) des fichiers de sorties de GAMIT pour ensuite créer un fichier pour chaque composante et chaque station. Ces données seront utilisées pour calculer les résultats pré-tomographiques.
- Le programme "dph2vdph" : extrait les éléments importants tels que les heures, les minutes, l'élévation et l'azimut des époques de calcul nécessaires puisque le calcul s'effectue par fenêtre glissante. Les calculs GAMIT s'effectuent par six sessions de 12h et pour le calcul TSAAR, on garde les 4h du milieu. Dans ce programme un angle de coupure est introduit pour ne pas garder les satellites à trop basse élévation car les mapping functions ne sont pas destinées à calculer des satellites à basse élévation. - Le programme "zwd2siwv" : calcule les SIWV à partir des ZWD de chaque station à
chaque époque de mesure. Il détermine les SIWV en utilisant les mapping functions, les gradients horizontaux et les mapping functions des gradients horizontaux et le coefficient
Ƙ
(équation 12) pour la conversion entre l'humidité et la vapeur d'eau. - Le programme "igs2xyz.sat" : extrait les coordonnées des satellites à chaque époque demesures en utilisant les fichiers d'orbites précises rapides.
- Le programme "zwd2iwv" : calcule les valeurs des IWV à partir des ZWD obtenus grâce à GAMIT. Il utilise le coefficient
Ƙ
(équation 12) pour la conversion entre l'humidité et la vapeur d'eau.- Le programme "siwv2tomo" : concatène les fichiers contenant les SIWV, les coordonnées des satellites ainsi que les coordonnées des stations. C'est le fichier sous la forme la plus adaptée pour le programme "inv.tomo" qui réalisera l'inversion tomographique.
- Le programme "mk_grille" : renvoie deux fichiers. Le premier renvoie les altitudes des couches définies par l'utilisateur. Le second fichier renvoie l'emprise de chaque voxel suivant les caractéristiques choisies par l'utilisateur comme l'emprise totale de la zone d'étude et le nombre de voxels au sol.
- Le programme "prep_graph_iwv" : crée un fichier pour chaque époque de mesure avec les valeurs des IWV de chaque station présente sur la zone d'étude.
- Le programme "density_voxel_colomn" : range les données en créant un fichier avec les résultats de l'inversion tomographique pour chaque époque de mesure et chaque colonne de voxels présente sur la zone d'étude.
Les losanges affichés en jaune (Voir Figure 15) sont des sorties du logiciel TSAAR et renvoient des résultats interprétables, le plus souvent des graphiques ou des coupes :
- Le programme "graphe_ztd" : renvoie trois graphiques sur l'évolution du ZTD au cours du temps. Le premier représente l'évolution du ZTD dans la journée pour chaque station. Le deuxième représente l'écart à la moyenne du ZTD sur la journée pour chaque station. Le dernier représente l'évolution du ZTD par rapport à la valeur suivante.
- Le programme "serie_iwv" : réalise un graphique par station avec l'évolution de l'IWV au cours de la journée.
- Le programme "graphe_iwv" : réalise une interpolation des IWV sur l'ensemble de la zone. Il crée ensuite une carte avec des valeurs d'IWV, c'est ce qu'on appelle les résultats pré-tomographiques. Il créé dans le même temps le fichier d'interpolation qui servira pour le calcul des valeurs initiales.
- Le programme "lat_cut" : réalise des coupes verticales de la répartition de la vapeur d'eau. Il en produit une par latitude centrale de chaque voxel au sol. Il en crée pour chaque époque de mesure.
- Le programme "long_cut" : réalise des coupes verticales de la répartition de la vapeur d'eau. Il en produit une par longitude centrale de chaque voxel au sol. Il en créé pour chaque époque de mesure.
- Le programme "horz_cut" : réalise des coupes horizontales de la répartition de la vapeur d'eau à chaque couche d'altitude et pour chaque époque de mesure. C'est le programme qui prend le plus de temps dans la chaîne de traitement puisqu'il crée au minimum 1 500 images par jour (ex : 96 époques * 16 couchesd'altitude = 1536 images).
- Le programme "density_voxel_time_serie" : ce programme réalise les séries temporelles de la quantité de vapeur d'eau pour chaque voxel. On obtient l'évolution de la quantité de vapeur de chaque voxel au cours de la journée.
b) Initialisation des données
L'initialisation des données correspond aux résultats pré-tomographiques de la Figure
15, ces données vont servir de valeurs initiales dans le processus d'inversion tomographique.
Les mesures GNSS nous donnent des valeurs sur la quantité totale de vapeur d'eau au-dessus des stations, mais ne fournit pas l'information sur la répartition verticale de celle-ci. Pour pallier à ce problème, il est utilisé un modèle de répartition verticale standard appelé atmosphère standard. Cette atmosphère standard représente la répartition verticale de vapeur d’eau tous les mètres au-dessus d'un point quelconque. Elle est issue d’une compilation des relevés atmosphériques réalisés en Europe de l’Ouest depuis une quarantaine d'années. C’est donc une moyenne sur une zone importante. Cependant, elle ne permet pas d’avoir une répartition locale, c'est pourquoi elle est couplée avec les mesures GNSS.
Malgré cela, l'atmosphère standard ne fournit que la répartition verticale pour un volume atmosphérique avec une humidité quelconque, ce n'est en aucun cas le volume atmosphérique réellement étudié. Ce sont les mesures GNSS qui vont nous donner la quantité d'humidité présente dans l'atmosphère étudiée avec les valeurs d'IWV calculés grâce aux ZWD issus du traitement GAMIT. En connaissant les IWV sur une station, en la couplant avec la répartition verticale fournit par l'atmosphère standard, on retrouve la répartition verticale des IWV sur les données de notre étude et on obtient ainsi les valeurs initiales des voxels (Voir Figure 16). Grâce à la répartition verticale donnée par l'atmosphère standard et la taille des voxels en altitude, on connaît la quantité de vapeur d'eau standard dans un voxel quelconque suivant sa hauteur. Dans le même temps, on connaît la quantité de vapeur d'eau réelle dans la colonne de voxel, cela permet d'avoir la quantité de vapeur d'eau dans chaque voxel en se basant sur la quantité totale. C'est une règle de proportionnalité, on appelle cette opération le recalage de l'atmosphère standard par les IWV.
Les valeurs de la courbe orange (Voir Figure 16) représentent ainsi une répartition standard de la vapeur d'eau suivant la quantité totale mesurée par GNSS. Ce sont ces valeurs qui servent de valeurs initiales car ce sont des valeurs assez proches de la réalité. L'aire sous cette courbe représente ainsi la quantité totale de vapeur d'eau dans l'atmosphère d'étude. L'inversion tomographique va nous permettre de retourner la quantité de vapeur d'eau réelle dans chaque voxel grâce aux mesures que sont les SIWV et déceler une répartition locale qui serait différente de la répartition standard.
c) L'inversion tomographique
Nous avons vu dans la partie I.3.3 que la zone d'étude est discrétisée en voxels (Voir
Figure 7) et que les rais (trajet d'humidité entre le récepteur et le satellite) traversent ceux-ci.
Il y a donc, selon la constellation des satellites au moment des mesures, des voxels traversés par beaucoup de rais et d'autres voxels sans aucun rai. On se retrouve à certains endroits avec une absence totale d'information et à d'autres endroits avec une surabondance d'informations. En langage mathématique, on parle de système à la fois sous-déterminé et surdéterminé. C'est cette théorie que développe Mathieu Reverdy lors de sa thèse (2008), pour résoudre ce problème il propose une méthode mathématique qui est la méthode des moindres carrés pondérés amortis qui fait apparaître un paramètre alpha. Selon sa valeur, cela va donner plus d'importance aux valeurs initiales ou aux données GNSS [Reverdy 2008]. Cette méthode est utilisée dans le logiciel TSAAR qui est repris pour ce TFE. La solution finale de la quantité de vapeur d'eau par résolution de l'inversion tomographique est donnée par l'équation suivante :
X
= X
0+ W
𝑖𝑛𝑖𝑡−1xG
tx (GxW
𝑖𝑛𝑖𝑡−1xG
t+ α²xW
𝑜𝑏𝑠−1)
-1x (L – GxX
0)
(16) X : vecteur des inconnues qui correspond au nombre de voxels,X0 : vecteur des valeurs initiales qui correspond au nombre de voxels,
W𝑖𝑛𝑖𝑡−1 : matrice de variance/covariance sur les valeurs initiales, c'est une matrice carrée du nombre de voxels, 0 1000 2000 3000 4000 5000 6000 7000 0 2 4 6 8 10 12 A LTIT U DE ( M )
QUANTITÉ DE VAPEUR D'EAU (G/M3)
Exemple de recalage de l'atmosphère standard
atmosphère standard valeurs initiales
W𝑜𝑏𝑠−1 : matrice de variance/covariance sur les observations, c'est une matrice carrée du nombre d'observations (SIWV),
G : matrice qui lie les observations aux inconnues, c'est une matrice de n lignes (nombre d'observations) et m colonnes (nombre de voxels),
L : vecteurs des observations qui correspond aux nombres de SIWV, α : paramètre alpha.
Le vecteur X est le résultat tomographique, il rend compte de la quantité de vapeur d'eau dans chaque voxel. La matrice G représente la longueur des rais dans les voxels.
Le paramètre alpha est très important : cette valeur varie entre zéro et un, zéro signifie que l'on ne prend en compte que les observations et non les valeurs initiales. Avec une valeur de un, on ne se préoccupe des observations on ne prend en compte que les valeurs initiales. Si on choisit un alpha faible, cela donne une part importante aux observations et le système peut diverger alors qu'à l'inverse la valeur d'alpha est grande cela laisse une part importante aux valeurs initiales et dans ce cas, la tomographie n'est plus utile. Le choix de ce paramètre alpha est donc très important car il influe directement sur les résultats de la tomographie.
L'inversion tomographique en tant que telle est réalisée par le programme "inv.tomo" (losange rouge) (Voir Figure 15). Ce programme calcule les valeurs initiales en recalant l'atmosphère standard par les IWV et construit également l'ensemble des matrices (équation 16) puis par le processus des moindres carrés pondérés amortis détermine la quantité de vapeur d'eau dans chaque voxel. Il détermine ainsi la quantité de vapeur d'eau dans chaque voxel à chaque époque de mesure.
J'ai présenté succinctement la chaîne de traitement telle qu'elle était au début du TFE. Cette chaîne comporte donc deux logiciels à la suite : GAMIT pour le calcul des ZWD suivi de TSAAR pour le calcul tomographique et la restitution du champ 3D de vapeur d'eau. Evidemment cette chaîne peut être améliorée, plus particulièrement le logiciel TSAAR et c'est un des objectifs de ce TFE qui fait l'objet de la partie suivante.
III] Optimisation et analyses du logiciel TSAAR
Un des principaux apports de ce TFE se situe au niveau du traitement du logiciel TSAAR. Olivier Le Coz, lors de son TFE (2015), a exposé des résultats sur lesquels il faut porter attention, c'est le cas de la surestimation de la quantité de vapeur d'eau en sortie de TSAAR. C'est un des points qui sera amélioré dans cette partie.
Un autre objectif de ce TFE est d'améliorer les résultats en sortie de TSAAR et leur validation, ce qui n'était pas le cas jusqu'ici. Une méthode de validation des résultats est proposée grâce à un modèle météorologique et d'autres méthodes d'initialisation qui pourraient remplacer l'atmosphère standard.
III.1. Optimisation du logiciel TSAAR
III.1.1.
Initialisation avec des données météorologiques
L'atmosphère standard nous donne une répartition verticale de la vapeur d'eau mais pas une répartition locale car ce sont des données moyennes sur un certain nombre d'années. Avec un modèle météorologique ou un modèle météorologique prévisionnel, il serait possible d'avoir une répartition verticale mais également plus locale, ce qui pourrait être un plus pour les valeurs initiales.
Il existe une multitude de modèles météorologiques mais certains sont plus connus et plus utilisés :
- Le GFS (Global Forecast System) est certainement le plus connu. C'est un modèle prévisionnel américain produit par le NCEP (National Center for Environmental Prediction) qui couvre l'ensemble de la Terre avec une résolution horizontale de la grille de 28 km, initialisé quatre fois par jour [@NOAA]4. Ces prévisions vont jusqu'à 16 jours avec une résolution de 70 km. Ces données sont disponibles gratuitement.
4 National Oceanic and Atmospheric Administration : site du département du commerce des Etats-Unis
Tableau 4 : Tableau des modèles météorologiques existant
Nom Instituts Couverture Résolution
Spatiale
Type
GFS NCEP Mondiale 28 à 70 km Prévisionnel
WRF
NCAR, NCEP, FSL, AFWA, NRL, OU et FAA
Etats-Unis 2 à 15 km Prévisionnel
ARPEGE Météo-France Mondiale 10 km sur la
zone Europe Prévisionnel
AROME Météo-France France 1.3 km Prévisionnel
IFS ECMWF Europe 16 km Prévisionnel
- Le modèle WRF (Weather Research and Forecasting model) est un modèle prévisionnel de méso-échelle5 couvrant uniquement les Etats-Unis, sa résolution va de 2 à 15km et utilise les résultats du modèle GFS. Il a été conçu conjointement par le NCAR (National Center for Atmospheric Research), le NCEP, le FSL (Forecast Systems Laboratory) l'AFWA (Air Force Weather Agency), le NRL (Naval Research Laboratory), la OU (Oklahoma University) et la FAA (Federal Aviation Administration). Ce modèle est également gratuit et initialisé quatre fois par jour [@wrf-model].
- Le modèle ARPEGE (Action de Recherche Petite et Echelle Grande Echelle) est un modèle prévisionnel mondial avec une résolution de 10 km sur la zone Europe crée par Météo-France [@meteociel].
- Le modèle prévisionnel AROME (Application of Research to Operations at MEsoscale) produit et utilisé en France avec une résolution très fine (1.3 km) [@meteo-contact]. Ce modèle a une prévision limitée de 36 heures, initialisé quatre fois par jour.
- Des modèles au niveau européen ont été développés, c'est le cas de IFS (Integrated Forecasting System) qui est un modèle de prévision développé par l'ECMWF (European Center for the Medium-range Weather Forecast) en coopération avec Météo France. Ainsi toutes les données de Météo-France sont utilisées pour les prévisions de l'ECMWF. Il possède une résolution de 16 km.
- L'ECMWF a également développé ce que l'on appelle des réanalyses avec le modèle Era-Interim, c'est une description récente du climat et de l'atmosphère en combinant les prévisions et les observations pour obtenir une représentation la plus réelle possible. Une première analyse est effectuée avec l'ensemble de ces données et une seconde est effectuée en retirant les données les moins précises ce qui rend un résultat encore plus proche de la réalité. Ces paramètres atmosphériques peuvent être déterminés à n'importe quel endroit sur la planète et ce modèle est initialisé toutes les 6h. Malheureusement, traiter ces données n'est pas instantané, ainsi leur disponibilité n'est que de deux mois après les observations effectuées. Ce modèle n'est pas disponible gratuitement qu'à la résolution de 0.25° alors que la plus fine qui est 0.125° (environ 14 km en longitude et latitude) entre deux points de la grille. Comme notre projet est en collaboration avec le LaMP (Laboratoire de Météorologie Physique) de Clermont-Ferrand et qu'ils ont eux-mêmes des partenariats avec l'ECMWF, nous avons pu avoir accès à l'ensemble des réanalyses, notamment les paramètres nécessaires à notre projet comme les IWV et la quantité de vapeur d'eau pour la période.
Ce modèle est d'autant plus intéressant car la grille de celui-ci possède un point en commun avec notre zone d'étude (Voir Figure 17), il est donc possible d'utiliser ce type de données comme initialisation.
III.1.2.
Surestimation du logiciel TSAAR
Lors du TFE d'Olivier Le Coz (2015), une des conclusions de celui-ci était que le logiciel TSAAR surestimait la quantité de vapeur d'eau principalement dans les basses couches (Voir
Figure 18). Anormalement, la quantité de vapeur d'eau en sortie était supérieure à celle en
entrée du logiciel. On le remarque sur ce graphique car l'aire sous la courbe des résultats (courbe bleue) est supérieure à celle des valeurs initiales (courbe rouge).
0 1000 2000 3000 4000 5000 6000 0 2 4 6 8 A LTIT UD E ( M )
QUANTITÉ DE VAPEUR D'EAU (G/M3)
quantité de vapeur d'eau du modèle météo le jour 24 mai 2015 à 12h
point sur la grille
Figure 17 : À gauche : schéma de la zone d'étude en rouge située par rapport à la grille du modèle Era-Interim, À droite Quantité de vapeur d'eau du point du modèle Era-Interim sur notre zone d'étude le 24 mai 2015 à 12h.
(Source : modèle Era-Interim)
Figure 18 : Exemple de surestimation du logiciel TSAAR le 24 mai 2015 à 19h au-dessus de la station MAN2.
Ces tests sur la surestimation ont été effectués avec les mesures réalisées en 2015 durant le TFE d'Olivier Le Coz.
a) Calcul de décomposition des rais
Ce problème de surestimation provenait très certainement d'erreurs dans le logiciel. Pour résoudre cela, d'éventuelles fautes dans le code ont dues être recherchées.
Effectivement il y avait une faute dans le programme "inv.tomo" (Voir Figure 15) qui fait appel à un sous-programme pour décomposer les rais dans les voxels. Pour construire la matrice G, qui représente la longueur des rais dans chaque voxel, il décompose chaque rai et cherche par quel voxel il passe. En connaissant, les coordonnées de la station d'où il part, l'azimut et l'élévation du satellite et les coordonnées de tous les voxels il est possible de déterminer quels voxels sont traversés.
Lorsque l'on connait le voxel au sol (voxel où se trouve la station), le sous-programme incrémente un pas de 10 m automatiquement, il cherche en fonction de la longitude, de la latitude et de la hauteur tous les voxels autour pour savoir où se situe ce rai. Lorsqu'il sait dans lequel il est, il incrémente de 10 m en 10 m jusqu'à ce qu'il en sorte. Il teste à nouveau pour voir dans quel voxel il se est et ainsi de suite jusqu'à atteindre 12 km d'altitude (la hauteur maximum de la zone d'étude) sauf si le rai sort de la zone d'étude avant les 12 km.
Le problème se situe au moment où le programme teste dans quel voxel il se trouve. Si le rai n'est pas dans le voxel testé, le sous-programme incrémente malgré tout de 10 m. Cela signifie qu'à la fin, il manque une partie du rai même s'il reste entièrement dans le réseau.
0 2 4 6 8 10 12 14 16 18 20 0 1000 2000 3000 4000 5000 6000 7000
QUANTITÉ DE VAPEUR D'EAU (G/M3)
A LTIT UD E ( M )
quantité de vapeur d'eau avec et sans le changement de décomposition des rais
atm_std valeurs_init résultat-tomo_avant-modif résultat-tomo_apres-modif Figure 19 : Comparaison de la différence de surestimation avec la nouvelle méthode de décomposition des rais dans les voxels dans la colonne de voxels au-dessus de la station MAN2 dans le cas de figure de 2x2 voxels au sol, le 24 mai 2015 à 19h avec un coefficient alpha de 0.05

![Figure 3 : Méthode de positionnement par GNSS : en haut méthode absolue, en bas méthode différentielle [Modifié]](https://thumb-eu.123doks.com/thumbv2/123doknet/6143125.157015/13.892.214.678.125.704/figure-méthode-positionnement-méthode-absolue-méthode-différentielle-modifié.webp)