© Pierre-Olivier Descoteaux, 2020
Étude numérique d'une turbine à axe vertical équipée de
pales flexibles
Mémoire
Pierre-Olivier Descoteaux
Maîtrise en génie mécanique - avec mémoire
Maître ès sciences (M. Sc.)
Étude numérique d’une turbine à axe vertical équipée
de pales flexibles
Mémoire
Pierre-Olivier Descoteaux
Sous la direction de :
ii
Résumé
Les turbines à axe vertical longtemps gardées dans l’ombre des turbines à axe horizontal commencent depuis quelques années à prendre davantage de place sur le marché des énergies renouvelables. Ce nouvel engouement pour cette technologie est notamment dû aux récentes avancées quant à leur efficacité les rendant de plus en plus concurrentielles. Ce présent mémoire s’inscrit dans la recherche sur l’amélioration de cette technologie en considérant l’utilisation de pales flexibles agissant comme un système passif de variation d’angle d’attaque. Il sera question dans un premier temps d’une étude 2D employant une turbine à pales droites munie d’un bord de fuite flexible. Cette étude est réalisée dans un premier temps afin de sélectionner les meilleures caractéristiques pour une étude 3D qui est menée par la suite. Un modèle employant la mécanique des fluides numériques couplé à un modèle d’élément fini est employé et validé dans ce mémoire. Le logiciel OpenFOAM utilisant une librairie maison pour le couplage solide est utilisé en 2D. La résolution du domaine 3D est quant à elle réalisée en employant le logiciel StarCCM+ ainsi qu’un couplage fluide structure intégrée à même le logiciel. Également, la modélisation de la turbulence est réalisée en employant le modèle de turbulence RANS k-ω SST, dans sa forme instationnaire. Les résultats de la première étude 2D montrent une augmentation de l’efficacité pour des conditions d’opération en dessous et au-delà du point de meilleur rendement. Cependant, il est également démontré que l’utilisation de pales flexibles diminue l’efficacité de la turbine à son point de meilleur rendement. Enfin, l’impact des effets 3D sur le comportement dynamique des pales flexibles vient changer les observations réalisées en 2D au point de meilleur rendement. En effet, la modélisation tridimensionnelle du problème permet de mettre en lumière une augmentation globale de l’efficacité de la turbine en réduisant considérablement la traînée des pales en agissant directement sur la formation des tourbillons de bout de pale.
iii
Abstract
Vertical-axis turbines, long kept in the shadow of horizontal-axis turbines, are starting to gain more importance in the renewable energy market nowadays. This new trend comes from recent advances in the efficiency, making them more competitive. This thesis takes part in the actual research by considering a flexible blade as a possible passive system to improve the efficiency of this technology. At first, a 2D study using a straight blade turbine with a flexible trailing edge is done in order to select the best characteristics for a 3D study which is carried out subsequently. A model employing computational fluid dynamic coupled to a finite element model is used and validated in this thesis. OpenFOAM software is used with an in-house library which allows fluid-solid couplings in 2D. The resolution of the 3D domain is conducted by using StarCCM+ software as well as a fluid-solid coupling integrated into the software. Also, the turbulence modeling is performed using the unsteady form of the RANS k-ω SST turbulence model. The result of the 2D study shows an increase in efficiency for the operating conditions below and above the optimal efficiency point compared with a turbine with rigid blade. It is also shown that the flexible blades decrease the efficiency of the turbine at the optimal efficiency point. However, the impact of 3D effects on the dynamic behaviour of flexible blades changes the observations made in 2D at the optimal efficiency point. Indeed, the three-dimensional modeling of the problem makes it possible to highlight an overall increase in the efficiency of the turbine by considerably reducing the vortex drag of the blades by acting directly on the formation of the tip vortices.
iv
Table des matières
Résumé ... ii
Abstract ... iii
Table des matières ... iv
Liste des figures ... vi
Liste des tableaux ... ix
Liste des Symboles et acronymes ... x
Remerciements ... xiv
Avant-propos ... xv
Introduction ... 1
Contexte et motivation ... 1
Historique énergétique ... 1
Enjeux des turbines à axe vertical et horizontal en exploitation ... 3
Littérature sur les systèmes de déformation actifs et passifs ... 9
Objectifs et structure du mémoire ... 14
Chapitre 1 Modélisation et méthode de résolution ... 15
1.1 Modélisation du problème aéroélastique ... 16
1.2 Solveur fluide et solide ... 22
1.2.1 Équations gouvernant le fluide ... 22
1.2.2 Équations gouvernant le solide ... 23
1.2.3 Modélisation de la turbulence ... 25
1.2.4 Maillage dynamique ... 30
1.2.5 Condition initiale ... 33
1.3 Couplage fluide-structure ... 36
1.4 Validations et limites du modèle ... 38
1.4.1 Validation et adaptation de l’algorithme 2D à un profil NACA en rotation ... 38
1.4.2 Validation de la méthodologie de couplage 3D avec l’utilisation du problème de Turek et Hron 39 1.4.3 Limitation en densité et en flexibilité ... 46
1.4.4 Limitation des fréquences ... 47
1.5 Conclusion ... 49
Chapitre 2 Étude 2D d’une turbine à axe verticale munie de pale avec un bord de fuite flexible ... 51
2.1 Résumé ... 51
v 2.2.1 Abstract ... 52 2.2.2 Nomenclature ... 53 2.2.3 Introduction ... 53 2.2.4 Problem definition ... 55 2.2.5 Numerical methods ... 57
2.2.6 Verification and validation ... 59
2.2.7 Results ... 62
2.2.8 Conclusion ... 69
Chapitre 3 Étude 3D d’une turbine à axe verticale munie de pale avec un bord de fuite flexible ... 71
3.1 Résumé ... 71
3.2 Approche de la simulation ... 72
3.3 Indépendance du maillage ... 74
3.4 Étude des effets de la flexibilité sur la plage d’efficacité de la turbine ... 77
3.5 Étude des effets tridimensionnels à bas 𝝀 ... 79
3.6 Étude des effets tridimensionnelles à haut 𝝀 ... 85
3.7 Étude des effets tridimensionnels près du point de meilleur rendement ... 89
3.8 Conclusion de l’étude 3D ... 91
Conclusion ... 92
Retour sur les résultats et les objectifs ... 92
Études future possible ... 93
vi
Liste des figures
Figure 1: Turbine à axe horizontal (HAT) (Turbinesinfo, 2011) ... 2
Figure 2: Turbine à axe vertical (VAT) (Firstfiled Ltd, 2009) ... 2
Figure 3: Revenus du marché de l'éolienne pour la turbine à axe vertical et à axe horizontal en milliard de dollar USD (Global Buisness Development, 2017). ... 2
Figure 4: Turbine à axe vertical déployable sur ponton de la compagnie New Energy. ... 3
Figure 5: Comparaison de la force de trainée des pales pour une turbine à axe horizontal et une turbine à axe vertical munie de deux pales. Tirée de l'étude menée par Borg & Collu (2015)... 4
Figure 6: Turbine à axe verticale avec des pales de type hélicoïdale (Christi, 2019). ... 5
Figure 7: Comparaison du couple produit par une turbine à pale hélicoïdale et à pale droite opérant à basse vitesse de rotation et étant composée de trois pales (Tuyen, et al., 2014). ... 6
Figure 8: Triangles de vitesse que voient les pales à trois différents instants dans un cycle. ... 7
Figure 9: Courbes obtenues via l'analyse théorique quasi-stationnaire des triangles de vitesses (a) l'angle d'attaque, (b) la norme du vecteur vitesse résultante et (c) la puissance théorique obtenue. ... 8
Figure 10: Turbine à axe vertical de type Savonius (Harshal, et al., 2016)... 9
Figure 11: Définition de l'angle de calage. ... 10
Figure 12: Concept de pale flexible présenté par Dag Herman (2015) représentant deux cambrures différentes. ... 12
Figure 13: (A) Concept de la turbine à axe vertical avec pale flexible présenté par Dag Herman (2015) ainsi que (B) la turbine installée dans le canal à eau de la centale électrique de Sarpefossen en Norvège. ... 12
Figure 14 : Définition des paramètres géométriques d'importance pour le problème. ... 16
Figure 15: Illustration des paramètres décrivant la flexibilité de l'aile. ... 19
Figure 16: Schéma de la définition du domaine de calcul en 2D. ... 20
Figure 17: Schéma de la définition du domaine de calcul en 3D. ... 21
Figure 18: Comparaison du coefficient de puissance en fonction de la position angulaire de la turbine pour une simulation réalisée avec et sans loi de paroi à 𝜆 = 2. ... 26
Figure 19: Comparaison du coefficient de puissance en fonction de la position angulaire de la turbine pour une simulation réalisée avec et sans loi de paroi à 𝜆 = 3. ... 27
Figure 20: Coefficient de puissance en fonction de la position de la pale dans le cycle pour les différents modèles de turbulence appliqués à la résolution d’une aile flexible à 𝜆 = 2, Σ = 10 et 𝛿 ∗= 15. ... 28
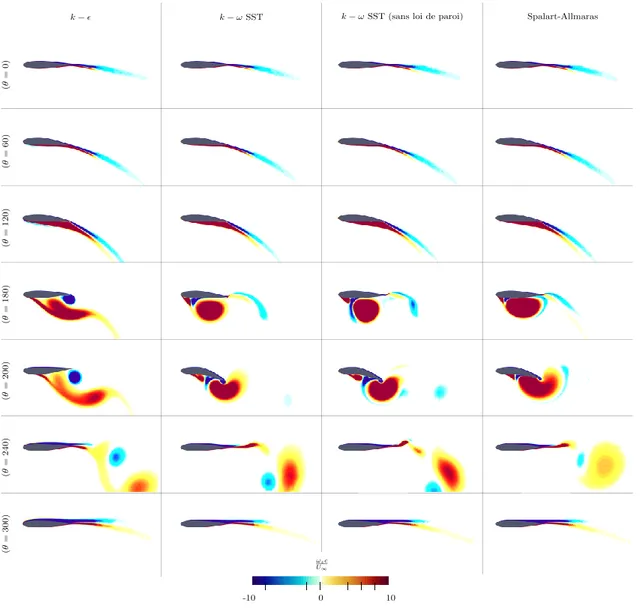
Figure 21: Comparaison des champs de vorticité pour différents modèles de turbulence et ce à différente position dans le cycle. ... 29
Figure 22: Maillage obtenu après 55 000 itérations en utilisant l’emplacement des nœuds précédents. ... 32
Figure 23: Maillage obtenu après 55 000 itérations en utilisant l'emplacement des nœuds initiaux. ... 32
Figure 24: Efficacité en fonction du nombre de cycles pour une pale rigide à 𝜆 = 4.25 ... 33
Figure 25: Efficacité en fonction du nombre de cycles pour une pale à Σ = 5, 𝛿 ∗= 15 et 𝜆 = 4.25. .... 34
Figure 26: Efficacité en fonction du nombre de cycles pour une pale à Σ = 10, 𝛿 ∗= 15 et 𝜆 = 3. ... 35
Figure 27: Comparaison des forces de pression et de frottement aux forces de réactions solide pour une pale rigide instationnaire. ... 38
Figure 28: Schématisation du problème de Turek et Hron (pas à l'échelle). ... 39
vii
Figure 30: Coefficient de force (a) et (b) et déplacement du bout de la plaque (c) pour le cas FSI2. Les données de référence ont été prises d’une base de données libre d’accès (FEATFLOW/FEAST team,
2011). ... 42
Figure 31: Séquence de vorticité pour FSI2. ... 43
Figure 32: Coefficient de force (a) et (b) et déplacement du bout de la plaque (c) pour le cas FSI3. Les données de référence ont été prise d’une base de données libre d’accès (FEATFLOW/FEAST team, 2011) . ... 44
Figure 33: Séquence de vorticité pour FSI3. ... 45
Figure 34: Exemple de problème de maillage à la suite de la rotation 1D des sections de maillage. ... 46
Figure 35: Représentation de l'espace paramétrique avec différents matériaux potentiellement employable dans la fabrication d'une pale flexible. ... 47
Figure 36: Rapport entre la fréquence naturelle et la fréquence de rotation pour différentes interactions fluide-solides et flexibilités pour une section constante. ... 48
Figure 37: Outline of the vertical-axis turbine showing the main geometric parameters and velocity triangles at a given position. ... 55
Figure 38: Illustration of the flexible blade. Instantaneous (𝛼) and effective (𝛼𝐸𝑓𝑓 ) angles of attack are also shown. ... 55
Figure 39: Computational domain and boundary conditions. Note that the image is not to scale. ... 59
Figure 40: Fluid and solid domains meshes. For the sake of illustration, only the coarse meshes are shown. ... 60
Figure 41: Power coefficient over the second cycle for three different meshes. ... 61
Figure 42: Power coefficient of a turbine with rigid blade over the third cycle. Three different meshes are compared with the reference results of Boudreau & Dumas (2017). ... 62
Figure 43: (a) Effect of blade flexibility on turbine efficiency 𝜂 for various tip-speed ratios 𝜆 at Σ = 10. Effect of 𝛿 ∗ and Σ on the efficiency 𝜂 at low (b), optimal (c), and high tip-speed ratios 𝜆 (d). ... 63
Figure 44: Comparison of a rigid blade’s and a flexible blade’s vorticity field (𝛴 = 10 and 𝛿 ∗ = 15) at 𝜆 = 2. ... 64
Figure 45: Comparison of a rigid blade’s and a flexible blade’s pressure field (𝛴 = 10 and 𝛿 ∗ = 15) at 𝜆 = 2. ... 65
Figure 46: Instantaneous power coefficient for different dimensionless flexibilities and pressure-to-inertia ratios. ... 66
Figure 47: Power coefficient for a flexible and a rigid blade at a tip-speed ratio of 𝜆 = 7. ... 68
Figure 48: Comparison of a rigid blade’s and a flexible blade’s pressure field (Σ = 10 and 𝛿 ∗ = 15) at 𝜆 = 7. ... 69
Figure 49: Maillage moyen du domaine fluide au plan de symétrie de la turbine (𝑧/𝑏 = 0). ... 72
Figure 50: Maillage moyen du domaine fluide sur l'envergure de la pale. ... 73
Figure 51: Maillage très grossier du bord de fuite solide sur l'envergure de la pale. ... 74
Figure 52: Comparaison du coefficient de puissance pour une configuration rigide à 𝜆 = 4.25 d'une pale avec des données de référence (Villeneuve, et al., 2020). ... 75
Figure 53: Efficacité en fonction de la vitesse de rotation de la turbine obtenu au 9ème cycle. ... 77
Figure 54: Coefficient de puissance en fonction de la position angulaire pour une pale 3D rigide et une pale avec le bord de fuite flexible à 𝜆 = 2. ... 79
Figure 55: Distribution du coefficient de puissance sur l’envergure de la pale à la section (a) identifiée dans la Figure 54 à 𝜃 = 90°. ... 80
Figure 56: Distribution du coefficient de puissance sur l’envergure de la pale à la section (b) identifiée dans la Figure 54 à 𝜃 = 130°. ... 81
viii
Figure 57: Distribution du coefficient de puissance sur l’envergure de la pale à la section (c) identifiée dans la Figure 54 à 𝜃 = 140°. ... 81 Figure 58: Coefficient de puissance en fonction de la position angulaire de la pale pour différentes
positions 𝑧/𝑏. Les paramètres de cette configuration sont Σ = 10, 𝛿 ∗= 15 et 𝜆 = 2. ... 82 Figure 59: Séquence de déformation du bord de fuite flexible (Σ = 10, 𝛿 ∗= 15) à la suite du
décrochage aérodynamique. ... 83 Figure 60: Séquence de déformation du bord de fuite flexible (Σ = 10, 𝛿 ∗= 15) à la suite du passage du tourbillon éjecté. ... 84 Figure 61: Comparaison du coefficient de puissance à différentes positions angulaires pour une pale flexible ainsi qu’une pale rigide 3D. ... 86 Figure 62: Séquence de déformation du bord de fuite flexible à 𝜆 = 5. ... 87 Figure 63: Isocontour de champs de vorticité pour comparaison du tourbillon en bout de pale à 𝜃 = 260° et 𝜆 = 5. ... 88 Figure 64: Coefficient de puissance en fonction de la position azimutal. ... 89 Figure 65: Isocontour de champs de vorticité pour comparaison du tourbillon en bout de pale à 𝜃 = 100° et 𝜆 = 3. ... 90
ix
Liste des tableaux
Tableau 1: Paramètres fluide et solide du problème de validation de Turek et Hron. ... 40 Tableau 2: Liste des différents paramètres utilisés en 2D et en 3D ... 49 Tableau 3: Caractéristique et tolérance sur les résidus utilisés pour la validation du maillage ... 75
x
Liste des Symboles et acronymes
Symboles
𝑥𝑝 Point de retenu de la pale
𝛼 Angle d’attaque de la pale
𝛼0 Angle de calage de la pale
𝛼𝑒𝑓𝑓 Angle d’attaque effectif
R Rayon de la turbine (𝑅 =𝐷
2)
λ Ratio de vitesse en bout de pale (𝜆 =𝜔𝑅
𝑈∞)
ν Viscosité cinématique
Vitesse de rotation de la turbine (𝜔 =𝑑𝜃
𝑑𝑡)
𝜌𝑓 Densité du fluide
𝜌𝑠 Densité du solide
𝑈∞ Vitesse amont de l’écoulement
𝛿∗ Flexibilité de la pale (𝛿∗=𝜌𝑓(𝜔𝑅)2𝑐3
𝐸𝐼′ )
Σ Ratio d’interaction (Σ =𝜌𝑓𝑅
𝜌𝑠𝑒)
𝜃 Position angulaire de la pale
xi
W Vitesse relative de l’écoulement
c Corde de la pale
N Nombre de pale
e Épaisseur maximale de la pale
E Module de Young
𝐼′ Inertie de section linéique (𝐼′= 𝑒 12) 𝑃(𝜃) Puissance instantanée 𝐶𝑃 Coefficient de puissance (𝐶𝑃= 𝑃(𝜃) 1 2𝜌𝑓𝑈∞3𝐷 ) 𝐶𝑃′
Coefficient de puissance pour une section dans l’envergure de la pale (𝐶𝑃′ = 𝑃′(𝜃) 1 2𝜌𝑓𝑈∞ 3𝐷 ) 𝜂 Efficacité de la turbine (𝜂 = 1 2𝜋∫ 𝐶𝑃(𝜃) 𝑑𝜃 2𝜋 0 ) Re Nombre de Reynold (𝑅𝑒 =𝑈∞𝐷 𝜈 ) 𝜎 Solidité de la turbine (𝜎 =2𝑁𝑐 𝐷 ) 𝜀 Ratio de blocage (𝜀 = (𝐴𝑇𝑢𝑟𝑏𝑖𝑛𝑒 𝐴𝐷𝑜𝑚𝑎𝑖𝑛𝑒) × 100) b Envergure de la pale D Traînée L Portance
xii
Acronymes
LE Bord d’attaque (Leading Edge)
TE Bord de fuite (Trailing Edge)
VAT Turbine à axe vertical (Vertical Axis Turbine)
HAT Turbine à axe horizontal (Horizontal Axis Turbine)
xiii
La vie c’est comme une boîte de chocolats,
on ne sait jamais sur quoi on va tomber.
Robert Zemeckis (Forrest Gump)xiv
Remerciements
La réalisation de ce mémoire a été possible grâce au concours de plusieurs personnes à qui je voudrais témoigner toute ma gratitude.
Je voudrais tout d’abord adresser toute ma reconnaissance à mon directeur de maîtrise, M. Mathieu Olivier, pour sa patience, sa disponibilité et surtout ses judicieux conseils, qui ont grandement contribué à alimenter mes recherches et mes réflexions.
Je désire aussi remercier le professeur Guy Dumas qui a su me transmettre énormément de ses connaissances en mécanique des fluides. Sa passion et son expérience dans le domaine ont été une source inestimable d’inspiration pour moi durant la réalisation de mes études graduées.
Je voudrais également exprimer ma reconnaissance envers mes amis et collègues du LMFN qui m’ont apporté un soutien moral et intellectuel tout au long de mon passage au laboratoire. Dès mes débuts au laboratoire en tant que stagiaire, vous m’avez accueilli et étiez toujours disponible pour partager vos connaissances avec moi. J’ai adoré les moments passés à jouer au SpikeBall avec vous. Les midis passés à écouter les nombreuses histoires farfelues de Kevin, de même que les soirées avec la gagne du LMFN vont certainement me manquer! Également, je voudrais te remercier Olivier Paré-Lambert pour avoir répondu un nombre incommensurable de fois à ma question à savoir comment on efface un dossier en ligne de commande.
Enfin, je ne peux passer outre ma reconnaissance envers ma copine Élisabeth, mes parents Serge et Lyne et de ma sœur Katerine. Leur présence, leur écoute, leur confiance en moi et leur soutien constant m’ont donné des bases solides me permettant de persévérer et de me surpasser. Je les remercie tous énormément.
xv
Avant-propos
Ce mémoire contient l’insertion d’un article réalisé dans le cadre des travaux de recherche. Les informations sur ce dernier sont les suivantes :
P. O. Descoteaux and M. Olivier (2020). Performances of vertical axis hydrokinetic turbines with
chordwise-flexible blades. En révision, soumis le 29 mai 2020 dans le Journal of Fluids and Structures,
Numéro d’article : YJFLS-2020-372.
Comme premier auteur, j’ai réalisé les simulations numériques ainsi que les analyses préliminaires. J’ai rédigé la première version de l’article qui a par la suite été révisé par le professeur Mathieu Olivier. La version présentée dans le mémoire n’est qu’une adaptation au format du mémoire. L’intégralité de l’article y est présente sans modification et dans sa langue de publication.
1
Introduction
Contexte et motivation
Historique énergétique
Depuis l’avènement de la révolution industrielle, le mode de vie des sociétés modernes occidentales est intimement lié à la présence d’énergie facilement accessible. À l’heure actuelle, ce mode de vie s’étend de plus en plus vers les pays en développement principalement grâce à l’utilisation des énergies fossiles. Pour cette raison, il est estimé que l’utilisation de ces dernières continuera de connaître une augmentation moyenne de deux pour cent par an (OCDE, 1999) au cours des prochaines années. En raison des émissions de gaz à effet de serre responsable des changements climatiques, l’utilisation de ces énergies devient de plus en plus contestée à travers le monde. Dans ce contexte de crise environnementale globale, la transition vers les énergies renouvelables apparaît comme la pierre angulaire de lutte contre ces changements climatiques.
Depuis quelques années, plusieurs types d’énergies sont donc mis de l’avant pour la recherche dans le but de les rendre plus performants, mais aussi plus rentables à opérer. Le marché de l’éolienne en est un bel exemple. En effet, ce dernier a connu une explosion au cours des années 1970 en raison des sommes énormes injectées dans la recherche et le développement de cette technologie. À l’époque, les recherches se sont majoritairement concentrées sur les éoliennes plus classiques du type des éoliennes à axe horizontal (HAT) illustré à la Figure 1 qui est le type couramment rencontré aujourd’hui. Cependant, il existe évidemment d’autres types d’éoliennes offrant de nouvelles possibilités non exploitées jusqu’à présent qui gagnent en popularité. C’est notamment le cas de la turbine à axe vertical (VAT) illustrée à la Figure 2 dont il sera question dans ce mémoire.
2
Figure 1: Turbine à axe horizontal (HAT) (Turbinesinfo,
2011) Figure 2: Turbine à axe vertical (VAT) (Firstfiled Ltd, 2009)
Il est intéressant d’étudier ce type de turbine, car ce marché est appelé à prendre de plus en plus d’importance au cours des prochaines années. En effet, les estimations illustrées la Figure 3 des revenus générés et projetés par les turbines à axe vertical comparativement aux turbines à axe horizontal tendent à montrer une augmentation de la portion de marché qui sera occupée par celles à axe vertical (Global Buisness Development, 2017).
Figure 3: Revenus du marché de l'éolienne pour la turbine à axe vertical et à axe horizontal en milliard de dollar USD (Global Buisness Development, 2017).
L’augmentation projetée du nombre d’éoliennes à axe vertical est en majeure partie due à un nouveau type de production d’énergie, qui se veut être une production à plus petite échelle incorporée aux espaces publics, aux routes et aux infrastructures telle que le Greenway Self Park à Chicago.
Le même constat est également vrai avec le marché de l’hydrolienne de petite envergure où les turbines à axe vertical commencent aussi à occuper une proportion toujours de plus en plus grandissante. Certaines compagnies telles que New Energy conçoivent des systèmes d’hydrolienne à axe vertical de
3
dimensions modestes dédiés à l’implantation facile et rapide dans les rivières (New Energy, 2016), ce qui se veut une belle alternative pour les pays et régions en développement ou à faible demande énergétique. Un prototype de cette hydrolienne incorporé à un ponton est illustré à la Figure 4.
Figure 4: Turbine à axe vertical déployable sur ponton de la compagnie New Energy.
Enjeux des turbines à axe vertical et horizontal en exploitation
De nos jours, les turbines à axe horizontal représentent toujours la plus grande proportion de la production d’énergie éolienne et hydrolienne. Cependant, l’augmentation de la demande en énergie nécessite de produire des éoliennes de plus grand diamètre et donc des profils de pale toujours plus complexe et difficile à produire. De son côté, la turbine à axe vertical exploitant le concept proposé par Darrieus (1926) semble intéressante pour ce point du fait qu’elle utilise un profil extrudé, ce qui rend sa production relativement simple en comparaison avec la turbine à axe horizontal.
Théoriquement, les deux types de turbines devraient fournir une efficacité similaire à celle de la turbine à axe horizontal de l’ordre de 45 %. Cependant, Avallone (1978) a démontré qu’en réalité, l’efficacité des turbines à axe vertical est plutôt de l’ordre de 30 %. Bien que ces deux concepts ne datent pas d’hier, ils ont été laissés de côté durant plus de 50 ans avant que la crise pétrolière des années 1970 ne vienne débloquer des fonds pour la recherche en énergie renouvelable. Ce n’est qu’alors que différents groupes de recherche ont commencé à les étudier et à les optimiser. Cependant, comme l’éolienne à axe horizontal bénéficie de toutes les avancées réalisées durant ces années sur les hélices des avions, les turbines à axe horizontal partent donc avec une bonne longueur d’avance sur celles à axe vertical. Il s’agit donc de la principale raison qui fait en sorte qu’environ 80% des éoliennes en exploitation dans le monde sont du type HAT (Global Buisness Development, 2017). Cependant, depuis quelques années, la recherche sur les turbines à axe horizontal tend à ralentir alors que celle sur les turbines à axe vertical tend à s’accélérer. Il est donc envisageable de croire que d’ici quelques années, des percées dans le domaine de l’éolienne à
4
axe vertical lui permette de devenir concurrentielle et peut-être même surpasser la turbine à axe horizontal conventionnelle.
L’amélioration de la technologie de la turbine à axe vertical semble très intéressante quant aux gains en simplicité d’utilisation qu’il serait possible de rencontrer. Par exemple, la turbine à axe vertical ne demande aucun système d’alignement vis-à-vis l’écoulement. Cette dernière peut donc accepter des écoulements provenant de n’importe quelle direction. Cette polyvalence d’utilisation permet à des machines relativement simples d’être employées dans des écoulements très fluctuants. De plus, les générateurs peuvent être placés à leur base ce qui simplifie grandement leur entretien. Ainsi, pour des applications hydrolienne, il est possible de placer le générateur à l’extérieur de l’eau ce qui permet d’augmenter considérablement sa longévité. Également, ces machines produisent des intensités sonores beaucoup plus faibles que les HAT ce qui est bien souvent à la base des problèmes d’implantation des éoliennes dans les communautés.
D’un autre côté, ces turbines possèdent certains inconvénients. En effet, une particularité des turbines à axe vertical est que les pales de ces dernières voient des conditions aérodynamiques fluctuant rapidement durant un cycle. Il en résulte donc la production d’un couple qui est non-uniforme au générateur. Il devient alors difficile de convertir un tel couple en une puissance constante pouvant être envoyé sur un réseau. Une telle fluctuation du couple n’est cependant pas ou très peu présente pour une HAT comme le démontre Borg & Collu (2015) dans la figure suivante :
Figure 5: Comparaison de la force de trainée des pales pour une turbine à axe horizontal et une turbine à axe vertical munie de deux pales. Tirée de l'étude menée par Borg & Collu (2015).
5
En plus des problèmes d’uniformisation de la puissance, la charge cyclique importante que cela engendre peut avoir des répercussions critiques sur la durée de vie des composantes. Pour pallier ce problème, plusieurs chercheurs ont émis différentes solutions permettant de niveler le plus possible ces charges cycliques. Parmi celles-ci, on retrouve l’augmentation du moment d’inertie permettant de diminuer les pics de puissance (Yang & Li, 2013) et ainsi niveler le couple au générateur. Aussi, une des solutions les plus évidentes, qui est également le sujet le plus étudié à l’heure actuelle sur la turbine à axe vertical, est le nombre de pales. En effet, plus la turbine compte de pales et plus cette dernière va tendre à uniformiser son couple résultant. Cependant, il n’est évidemment pas possible d’augmenter à l’infini le nombre de pales. En effet, l’augmentation du nombre de pales se traduit par le fait même par une augmentation de l’effet de blocage sur l’écoulement, ce qui diminue l’efficacité de la turbine. Le paramètre sans dimension communément utilisé pour quantifier ce blocage est la solidité 𝜎 définie plus en détail dans la section 2.1. Blackwell et al. (1976) et Sheldahl et al. (1980) ont tous deux démontré que pour un faible blocage tel que 𝜎 < 0.2, il était possible d’obtenir des efficacités de l’ordre de 40%, alors que pour des blocages plus important tels que 𝜎 > 0.5, il était difficile de dépasser 30 % (Rawlings (2008); Navabi (2008); Howell et al. (2010)). De plus, une autre approche couramment rencontrée permettant de diminuer les fluctuations importantes du couple au générateur est d’utiliser des turbines composées de pale hélicoïdale tel qu’il est illustré sur la Figure 6.
Figure 6: Turbine à axe verticale avec des pales de type hélicoïdale (Christi, 2019).
Diverses études (Tuyen et al. (2014), Marsh et al. (2015) et Gosselin (2015)) ont démontré que l’utilisation de turbines à axe vertical équipées de pales hélicoïdales permettait de diminuer les fluctuations importantes du couple de manière significative. La Figure 7 présente les résultats d’une étude numérique où il est possible de noter cette diminution de fluctuation pour une turbine constituée de trois pales opérant à basse vitesse de rotation. Ils ont également démontré dans cette étude que les pales hélicoïdales aidaient au démarrage de la turbine. Cependant, la diminution des fluctuations était généralement accompagnée d’une
6
diminution des efficacités globales des turbines particulièrement à leur point de meilleur rendement. Cette diminution de l’efficacité s’explique par un phénomène de décrochage. En effet, même si la pale est un continuum dans son ensemble, chaque petit segment de cette dernière peut être vu comme possédant un angle d’attaque légèrement différent du segment au-dessus ou en dessous. Cela veut donc dire que lorsque les couches limites d’un segment commencent à se séparer, habituellement près du point de portance maximal, cette séparation se propage par la suite facilement au reste de la pale. Ainsi, c’est via la propagation du décrochage que les pales hélicoïdales vont voir leur efficacité réduite.
Figure 7: Comparaison du couple produit par une turbine à pale hélicoïdale et à pale droite opérant à basse vitesse de rotation et étant composée de trois pales (Tuyen, et al., 2014).
De plus, une particularité de ces turbines, fonctionnant avec la portance, est qu’elles ne démarrent pas naturellement. C’est-à-dire, qu’il faut bien souvent un mécanisme permettant à la turbine de démarrer sa rotation qui sera maintenue par la suite grâce à la portance générée sur ses pales. Bien que les études transitoires, nécessaires pour l’analyse du démarrage, ne fassent pas parti du présent mémoire, il était tout de même intéressant de mentionner le point, car il permet de bien mettre en lumière le fonctionnement de la turbine. En effet, tel que mentionné précédemment, ce type de turbine fonctionne par portance. C’est-à-dire, que les pales de la turbine produisent un couple grâce à l’orientation du vecteur portance (L) généré par celles-ci. Une représentation du concept via l’utilisation des triangles de vitesse est illustrée sur la Figure 8. Cette illustration permet de bien visualiser les vecteurs de forces générés de même que leurs orientations en trois différentes positions dans un cycle. Pour la définition des différents paramètres, se référer à la section 1.1.
7
Figure 8: Triangles de vitesse que voient les pales à trois différents instants dans un cycle.
À vitesse de rotation constante, les pales de la machine voient donc dans leur référentiel des angles d’attaque (𝛼) de même que des vitesses fluctuantes tel qu’illustré sur la Figure 9a et 9b. Il est ainsi possible de calculer théoriquement, en assumant une hypothèse d’un écoulement quasi-stationnaire, la portance et la trainée produite par une pale, permettant ainsi de comprendre comment il est possible d’obtenir un couple avec cette turbine. Comme l’approche présentée à la figure ci-dessous ne prend pas en compte le comportement dynamique de l’écoulement de même que le déficit de vitesse du sillage, il va de soi, que les graphiques considérant la dynamique de l’écoulement vont avoir des comportements différents en particulier dans la portion aval, soit l’intervalle 𝜃 ∈ [180° à 360°].
8
Figure 9: Courbes obtenues via l'analyse théorique quasi-stationnaire des triangles de vitesses (a) l'angle d'attaque, (b) la norme du vecteur vitesse résultante et (c) la puissance théorique obtenue.
Le problème du démarrage survient lorsque la vitesse de rotation 𝜔𝑅 est nulle. Comme ce type de turbine est conçu pour opérer en portance et non en traînée, il est habituellement assez symétrique face à l’écoulement du point de vue de sa traînée. Bien qu’une dissymétrie existe, elle n’est habituellement pas suffisante pour combattre les forces de friction de la machine permettant de la mettre en marche. À l’opposé, certains concepts de turbine à axe vertical comme celle de type Savonius illustrée à la Figure 10 sont conçus pour opérer en traînée et produisent donc intrinsèquement des profils non-symétriques de traînée dans l’écoulement pour leur permettre de générer un couple et d’en extraire de l’énergie.
9
Figure 10: Turbine à axe vertical de type Savonius (Harshal, et al., 2016).
Il est cependant généralement admis que leur efficacité est de loin inférieure à celle opérant à partir de la portance. C’est d’ailleurs une des raisons pourquoi le concept d’intérêt dans ce mémoire est une machine fonctionnant par portance.
De plus, il existe deux techniques communément utilisées pour permettre de mettre en opération les turbines à axe vertical fonctionnant par portance. La plus rencontrée consiste à utiliser le générateur ou un moteur externe pour initier la rotation de la machine. Les petites machines vont habituellement utiliser leur propre générateur alors que celle de plus grande envergure vont quant à elle avoir recours à un moteur complémentaire. La deuxième technique consiste à utiliser un système permettant de modifier l’angle des pales. Ce mécanisme permet donc de rendre la trainée de la machine dissymétrique lui permettant ainsi de démarrer sa rotation. La section suivante présentera davantage ce mécanisme et ses variantes.
Littérature sur les systèmes de déformation actifs et passifs
Parmi les différentes solutions existantes permettant de répondre aux problématiques d’uniformisation du couple et de démarrage des turbines à axe vertical, il est possible de retrouver les systèmes de déformation actif de l’angle de calage des pales. Ces systèmes fonctionnent de la même manière que les systèmes de démarrage et de contrôle de vitesse que l’on retrouve chez les turbines à axe horizontal. C’est-à-dire que l’angle que fait la pale avec l’écoulement peut être modifié pour permettre à la turbine d’amorcer sa rotation ou à l’inverse, de diminuer sa vitesse de rotation pour l’arrêter. Le système appliqué à la turbine à axe vertical pousse le concept plus loin en permettant des ajustements d’angle de haute fréquence permettant ainsi d’ajuster l’angle des pales à chaque position dans un cycle. Le but est de permettre à la machine de démarrer, mais aussi d’augmenter son efficacité. En effet, comme il est possible
10
de modifier l’angle d’incidence de l’écoulement vu par les pales, il devient alors possible d’augmenter l’efficacité de la turbine en conservant un angle optimal vis-à-vis l’écoulement. L’angle de calage se définit donc comme l’angle engendré par la perpendiculaire du rayon et la corde de la pale (𝛼𝑜) dans la Figure 11.
Figure 11: Définition de l'angle de calage.
Dans un premier temps, plusieurs auteurs ont étudié l’effet d’ajouter un angle de calage qui demeurerait constant en chaque position du cycle, mais qui serait variable en fonction de la vitesse de rotation de la turbine ((Andrzej & Stephen (2009); ZHANG et al. (2014) et Yanzhao et al. (2018)). Ils ont tous démontré le bénéfice sur l’efficacité de la turbine d’ajouter un angle de calage différent pour la vitesse d’opération. Ils ont également démontré que les portions du cycle les plus affectées par cet ajout sont les portions du cycle où les pales de la turbine sans angle de calage seraient alignées avec l’écoulement.
Un autre groupe de recherche (Liang, et al., 2016) a quant à lui démontré qu’il était possible de doubler l’efficacité d’une turbine en l’équipant d’un système actif de variation de l’angle de calage qui est fonction de sa position dans le cycle. L’étude a été réalisée à basse vitesse de rotation, c’est-à-dire pour un 𝜆 d’opération de 1.5 (voir la section 2.1 pour la définition du paramètre 𝜆). Le profil de variation d’angle de calage pour le système de contrôle a été déterminé via une étude paramétrique réalisée numériquement en 2D. Ils ont par la suite validé leurs résultats avec un modèle expérimental en soufflerie. Cependant, l’énergie requise pour la variation des angles n’a pas été prise en considération dans le calcul de l’efficacité de la turbine. De plus, ils ont mis en lumière l’augmentation de la plage d’exploitation efficace pour 𝜆 compris entre 1.5 et 2.5 de même que l’amélioration du démarrage de la turbine lorsque leur profil d’angle de calage était employé.
D’autres auteurs ont plutôt utilisé le concept d’angle de calage variable en se concentrant particulièrement sur les problèmes de démarrage de la turbine mentionné à la section 1.1.2. C’est notamment le cas de Chougule, et al. (2013) qui ont démontré avec une méthode de tubes de courant double qu’il était possible de faire démarrer une turbine qui était originellement incapable de démarrer d’elle-même en ajoutant une variation de l’angle de calage de 2.5 degrés. De plus, Shek & Mueller (2016) mentionne également l’amélioration du démarrage en utilisant un système actif. Dans cet article, ils mettent de l’avant la polyvalence de cette technologie. Il est notamment question du démarrage, mais aussi de
11
l’ajustement du contrôle actif en fonction des conditions d’opérations et du décrochage des pales pour l’obtention d’augmentation d’efficacité autant à basse vitesse de rotation qu’à haute vitesse.
Un autre concept intéressant a montré qu’il était possible d’obtenir expérimentalement une augmentation de l’efficacité de 35 % sur une turbine possédant initialement une efficacité de 32.3% (Erickson, et al., 2011), sans utiliser de contrôle actif conventionnel. Il a plutôt utilisé un mécanisme à came permettant de reproduire un mouvement préalablement établi. La même démarche avec d’autres profils a par la suite été reprise par d’autres auteurs qui ont eux aussi démontré des augmentations en efficacité de l’ordre de 12 % sur une turbine de 500 W (Prasad & Soren, 2014). L’avantage de procéder ainsi est de bénéficier d’une variation de l’angle de calage ne nécessitant aucun ajout de puissance. En effet, bien que les contrôleurs actifs offrent de meilleurs rendements leur application en pratique est souvent très difficile à réaliser, de même que d’assurer un bon fonctionnement à long terme (Liang, et al., 2016).
Par la suite, des chercheurs se sont intéressés à des pales utilisant un système actif, non pas pour changer l’angle de calage, mais pour changer la forme de ces dernières. Par exemple, Mohamed & Mohamed (2017) ont montré qu’il est possible d’augmenter l’efficacité d’une turbine de 35 % en modifiant la forme du bord d’attaque pour des utilisations à faible 𝜆. Cette déformation (vers l’extérieur de la zone de rotation de la turbine) a comme effet d’augmenter la magnitude du tourbillon généré au bord d’attaque ainsi que de contrôler le moment où ce dernier sera formé. Selon l’auteur, ce tourbillon augmente la performance de la turbine en augmentant la zone de succion qui à son tour augmente la différence de pression entre l’extrados et l’intrados de la pale. Dans une autre publication, ils ont également montré qu’il était possible d’augmenter de 38 % l’efficacité d’une turbine en modifiant la forme du bord de fuite toujours pour des faibles 𝜆. Encore une fois, cette augmentation est due à une augmentation en intensité du tourbillon généré au bord d’attaque. Le même comportement a également été observé par Lui & Xiao (2015) et Zhu (2007) pour des ailes oscillantes flexibles.
D’un autre côté, la déformation peut être réalisée de manière passive, c’est-à-dire sans aucun apport en énergie pour produire la déformation de la pale. Cette déformation est plutôt réalisée via l’interaction fluide-structure. La bonne déformation est obtenue en choisissant judicieusement la masse ainsi que la rigidité de la pale flexible. Pour réaliser une pale alliant matériaux actuellement utilisés dans la fabrication des turbines à axe vertical avec une déformation passive, il est alors plus facile d’obtenir des déformations de grande amplitude lorsque le fluide utilisé a une densité importante comme l’eau. La possibilité d’utiliser des pales flexibles pour une turbine à axe vertical a été proposée pour la première fois par Eelco, et al. (2009) dans une étude numérique utilisant un solveur potentiel jumelé à un solveur de couche limite le tout couplé avec les équations de dynamique des solides. Par la suite, les premières études expérimentales ont été menées par Dag Herman (2014) et Dag Herman (2015). Ce dernier a utilisé des
12
éléments structurels flexibles composés de tiges en acier ainsi que d’un revêtement polyvinyle et de nylon pour former les profils des pales. Les profils de déformation qu’il est alors possible d’obtenir avec son approche sont présentés à la Figure 12.
Figure 12: Concept de pale flexible présenté par Dag Herman (2015) représentant deux cambrures différentes.
Un fait important à noter de son étude est que le point de retenue de l’aile est monté sur un ressort de torsion ce qui lui permet de changer son angle de calage de manière passive également. Les résultats expérimentaux obtenus tendent à montrer qu’une turbine équipée de pales flexibles obtient des rendements légèrement supérieurs à ceux d’une turbine équipée de pales rigides. La grande distinction survient dans la stabilité de la turbine à s’ajuster aux perturbations de l’écoulement. En effet, les pales flexibles tendent à uniformiser l’efficacité moyenne de la turbine ce qui se traduit en des vitesses de rotation plus stables avec moins de pics de contraintes internes dans la turbine. Ils ont également montré que les vibrations induites par les pales étaient considérablement réduites. Les tests ont été menés sur un seul prototype de grande envergure (Figure 13) pour un bas 𝜆. Le groupe de recherche prévoit analyser de nouvelles configurations dans les prochaines années.
Figure 13: (A) Concept de la turbine à axe vertical avec pale flexible présenté par Dag Herman (2015) ainsi que (B) la turbine installée dans le canal à eau de la centale électrique de Sarpefossen en Norvège.
13
Une autre étude expérimentale menée par Jonathan, et al. (2014) sur les effets inertiels d’une pale munie d’un bord de fuite flexible opérant dans l’air a démontré qu’il était possible d’améliorer l’efficacité à basse vitesse. Ils mettent également en lumière eux aussi l’uniformisation du couple vis-à-vis des fluctuations de vitesse de l’écoulement. Cependant, lorsque la vitesse augmente, les effets inertiels tendent à déformer la pale de manière néfaste pour l’extraction d’énergie de la machine. Fait intéressant à noter de cette étude est que malgré le fait que la pale n’ait pas été conçue pour démarrer d’elle-même cette dernière démarrait d’elle-même la plupart du temps.
14
Objectifs et structure du mémoire
L’objectif du mémoire est de rendre compte de l’impact de l’utilisation d’un système passif de déformation des pales sur l’efficacité d’une turbine à axe vertical. Pour ce faire, les différents objectifs secondaires suivant devront être rencontrés :
▪ Déterminer l’impact de la flexibilité au point de meilleur rendement de la turbine. ▪ Déterminer l’impact de la flexibilité sur la plage de haute efficacité de la turbine.
▪ Explorer et comprendre les nouveaux mécanismes se rattachant à la flexibilité de la pale. Pour ce faire, l’analyse de cette problématique se fera sur quatre chapitres. Dans un premier temps, l’introduction a présenté un portrait de l’avancement de la recherche vis-à-vis des turbines à axe vertical ainsi que les différents systèmes de variation de l’angle de calage actif et passif qui ont déjà été étudiés. Le but de ce chapitre est de présenter les recherches antérieures qui ont été réalisées par la communauté scientifique sur le sujet permettant ainsi de mieux comprendre les enjeux qui entourent cette technologie. Le chapitre 1 permet de bien définir la problématique étudiée. Pour ce faire, la méthodologie suivie dans le but d’obtenir un modèle fiable permettant de prédire le comportement dynamique d’une turbine équipée de pales flexibles dans le sens de la corde est présentée. Ce chapitre présente donc la théorie de même que les techniques utilisées pour modéliser le problème.
Par la suite, pour déterminer les paramètres qui influent sur la performance d’une turbine à axe vertical avec pales flexibles, une étude paramétrique en 2D est menée et présentée dans le chapitre 2. Cette étude est présentée sous forme d’un article. Ce dernier fait ressortir les mécanismes clés gouvernant la problématique. Il donne ainsi une bonne idée de l’impact associé à l’utilisation de pales flexibles.
De plus, dans le but de pousser plus loin les observations réalisées en 2D, le chapitre 3 présente une étude menée en 3D à partir des paramètres optimaux tirés du chapitre 2. Le chapitre 3 se rapprochant ainsi le plus de la réalité va donc permettre d’obtenir la réponse à la problématique.
Enfin, une discussion récapitulative va conclure la présente étude en réalisant la synthèse des démarches et résultats obtenus au travers de ce mémoire.
15
Chapitre 1 Modélisation et méthode de résolution
Ce chapitre traite de la modélisation réalisée pour la résolution numérique du problème aéroélastique d’une turbine à axe vertical équipée de pales flexibles. La première partie traite de la portion modélisation du problème ainsi que des métriques utilisées pour l’évaluation des performances. De plus, comme ce problème sera résolu sous une forme sans dimension, les équations seront également présentées sous cette forme. Il sera question autant de la modélisation du problème via l’approche 2D que de la modélisation du problème en 3D. La seconde partie de ce chapitre porte sur la méthode numérique employée pour la résolution du problème fluide-structure. Cette section traitera notamment des équations employées, mais également des modules intégrés au logiciel OpenFOAM et STAR CCM+ qui ont été utilisés. La méthode de couplage fluide-structure maison utilisée de même que la méthode de couplage commercial utilisée dans STAR CCM+ seront également présentées. La dernière partie de ce chapitre est quant à elle consacrée à la validation et aux limites des modèles de résolution utilisés. On y retrouve notamment une validation de la méthodologie de couplage réalisée en 3D, mais aucune validation du couplage n’est présentée pour le 2D. La raison étant que la validation de ce dernier est déjà présentée en détail dans la thèse de Olivier (2014). Cependant, il est tout de même inévitable que certaines validations aient quand même dues être réalisées permettant de passer de la plaque mince oscillante employé dans la thèse de Olivier (2014) au profil NACA en rotation utilisé dans ce mémoire.
16
1.1 Modélisation du problème aéroélastique
La modélisation du problème d’aéroélasticité commence par la représentation du mouvement qu’effectue une turbine à axe vertical. Ce mouvement se caractérise par une vitesse angulaire constante (𝜔) de la pale autour d’un axe perpendiculaire à un écoulement donné. Ce mouvement est représenté à la Figure 14. Cette dernière illustre une vue de haut d’une turbine qui serait placée à la verticale dans un écoulement provenant de la gauche vers la droite de vitesse (𝑈∞). Le profil d’aile utilisé dans le présent
mémoire est un profil NACA 0015. Le choix de ce profil provient des analyses menées par Gosselin (2015) et Gosselin, et al. (2016) qui ont démontré le potentiel intéressant de ce profil pour une application à la turbine à axe vertical.
Figure 14 : Définition des paramètres géométriques d'importance pour le problème.
Le point d’attache de la pale est situé à une distance (𝑥𝑝) du bord d’attaque de l’aile le long de la
corde de cette dernière. Ce point représente l’emplacement du lien rigide reliant la pale au centre de rotation. Le calcul de la performance d’une turbine à axe vertical s’obtient dans un premier temps en déterminant le coefficient de puissance instantané. Ce dernier est défini dans la littérature comme étant :
𝐶𝑃=
𝑃(𝜃) 1
2 𝜌𝑓𝑈∞3𝐷
, (1.1)
où (𝜌𝑓) est la densité du fluide considéré, (𝐷) est le diamètre de la turbine et (𝑃(𝜃)) est la puissance instantanée pour une position angulaire (𝜃) donnée dans le cycle. Cette puissance instantanée est obtenue en multipliant le couple instantané de la turbine (𝑀(𝜃)) à sa vitesse angulaire (𝜔) comme :
17
𝑃(𝜃) = 𝑀(𝜃)𝜔 . (1.2)
La mesure du couple est tirée des forces fluides ainsi que des forces inertielles agissant à un point positionné à une distance (𝑥𝑝) du bord d’attaque. Ainsi les forces agissant sur ce point de retenue sont par
la suite exprimées en termes de moment au centre de la turbine. L’efficacité de la turbine s’obtient enfin en intégrant la puissance instantanée sur un cycle comme suit :
𝜂 = 1
2𝜋∫ 𝐶𝑃(𝜃) 𝑑𝜃
2𝜋
0
. (1.3)
Dans le même ordre d’idée, il est possible de définir un coefficient de force pour la composante de force tangente (𝐶𝑥) et normale à la pale (𝐶𝑦). Tous deux définis comme suit :
𝐶𝑥 = 𝐹𝑥(𝜃) 1 2 𝜌𝑓𝑈∞2𝐷 , 𝐶𝑦= 𝐹𝑦(𝜃) 1 2 𝜌𝑓𝑈∞2𝐷 . (1.4)
Les paramètres importants permettant de définir le problème sont donnés sous leur forme sans dimension. Dans un premier temps, il y a le facteur de vitesse spécifique (𝜆) qui peut être interprété comme une vitesse de rotation sans dimension. Ce facteur est défini par :
𝜆 =𝜔𝑅 𝑈∞
. (1.5)
Également, il y a le nombre de Reynolds qui est utilisé pour caractériser le rapport entre l’inertie convective et les forces visqueuses dans l’écoulement. Ce dernier est exprimé comme suit :
𝑅𝑒 =𝑈∞𝐷
𝜈 . (1.6)
Ensuite, le paramètre de solidité permet de donner une relation sur le nombre de pales utilisées. Il permet notamment de représenter le blocage moyen de la turbine dans l’écoulement, en caractérisant la proportion de l’aire des pales par rapport à l’aire balayée par ces dernières. Ce dernier est défini comme suit :
18 𝜎 =2𝑁𝑐
𝐷 , (1.7)
où (𝑁) est le nombre de pales et (𝑐) la corde d’une pale. Dans ce mémoire, une seule pale a été considérée (𝑁 = 1) alors que des configurations à trois pales sont habituellement rencontrées. Ce choix est fait afin de simplifier le problème ainsi que le temps de résolution. Cependant, il est tout de même attendu que les cas présentés représentent le comportement de la turbine munie de plusieurs bras possédant la même solidité. Ce constant a notamment été rapporté par Gosselin, et al. (2016) sur des turbines équipées d’un et trois bras possédant la même solidité.
Ces paramètres sans dimension sont les paramètres utilisés dans la littérature des turbines à axe vertical. Dans le présent mémoire, deux paramètres sans dimensions de plus doivent être utilisés pour tenir compte de la flexibilité des pales. Ces derniers utilisent la même approche que celle présentée par Olivier (2014). Le premier paramètre représente le ratio des forces de pression sur les forces inertielles. Ce dernier permet donc de déterminer si les forces dominantes qui produisent la déformation de la pale sont induites par l’inertie de la pale ou bien par les forces de pression du fluide. L’approximation des forces inertielle est définie comme étant :
𝐹𝐼 = 𝜌⏟𝑠𝑒𝑐 𝑚
∙ 𝜔⏟2𝑅 𝑎
, (1.8)
où (𝜌𝑠) est la densité du solide et (𝑒) l’épaisseur du profil. L’approximation des forces de pression est quant à elle définie selon la théorie des plaques minces (Abbott & Doenhoff, 1959) comme étant :
𝐹𝑃=
1
2𝜌𝑓(𝜔𝑅)
2𝑐 𝐶
𝐿 , (1.9)
où 𝐶𝐿≈ 2𝜋𝛼 ≈ 2 si 𝛼 est considéré comme étant évalué à 20°. Ce qui représente un angle d’attaque effectif typique vu par la pale dans son cycle. Ainsi, réutilisant les deux dernières équations, le ratio des forces de pression sur les forces inertielle se définit comme étant :
Σ =𝜌𝑓𝑅 𝜌𝑠𝑒
(1.10)
Ce paramètre sera défini comme le paramètre d’interaction. Ainsi, une interaction fluide-structure forte sera caractérisée par Σ ≫ 1 alors qu’une interaction fluide-structure faible sera plutôt caractérisée par Σ ≪ 1.
19
Enfin, le dernier paramètre sans dimension utilisé permet de quantifier la magnitude de la déformation de la pale. Ce dernier est analogue à la normalisation d’une solution élémentaire de poutre chargée et se définit comme :
𝛿∗=𝜌𝑓(𝜔𝑅)
2𝑐3
𝐸𝐼′ , (1.11)
où 𝐼′ est l’inertie de section linéique se définissant comme 𝐼′= 𝑒
12. Le paramètre 𝐸 est le module de Young
de la section solide flexible.
En pratique, comme la composition interne de la pale est sujette à de grandes variations en raison des différentes techniques de fabrication des pales une rigidité uniforme a donc été considérée. La rigidité de l’aile est donc applicable à une pale possédant une rigidité composée d’un produit constant entre l’inertie de section et un module de Young (𝐼′𝐸 = 𝑐𝑡𝑒). La nomenclature associée à cette flexibilité est illustrée sur
la Figure 15:
Figure 15: Illustration des paramètres décrivant la flexibilité de l'aile.
Bien que deux configurations de flexibilité aient été analysées, une seule a retourné des résultats intéressants permettant de figurer dans le présent mémoire. La configuration présentée est celle avec un bord de fuite flexible soit la zone en gris pâle sur la Figure 15. Également, la position du point d’attache (𝑥𝑃) va demeurer constante tout au long de ce mémoire comme étant située au tiers de corde, soit
𝑥𝑝
𝑐 = 1 3,
dans le but de se comparer à des études de référence menées sur la même turbine en 2D et 3D (Boudreau & Dumas (2017) et Villeneuve, et al. (2020)). La modélisation 3D n’utilisant pas une inertie de section constante, mais une inertie de section qui est fonction de l’épaisseur du profil devrait fournir des résultats légèrement différents de ceux obtenus avec la pale 2D. Également, l’envergure de la pale considérée en 3D est la même que celle de l’étude de Villeneuve et al. (2020) soit : b/c = 7.5.
La résolution du problème fluide-structure a été réalisée en utilisant la mécanique des fluides numérique. Cette dernière est par la suite jumelée de manière bidirectionnelle à une résolution numérique de la dynamique de déformation des solides via l’utilisation de la méthode des éléments finis. Cette approche consiste donc à étudier la dynamique du fluide autour des corps, via la résolution des équations de
Navier-20
Stokes en même temps que de prendre en compte sa rétroaction avec le corps solide. La section suivante 1.2 donne davantage d’information sur cette méthode de résolution numérique employée. De plus, les dimensions des domaines ainsi que les conditions aux limites utilisées avec cette approche de calcul sont schématisées à la Figure 16 et Figure 17. Pour assurer la rotation de la pale autant en 2D qu’en 3D, une zone de maillage en rotation a été utilisée. Une interface non conforme est utilisée pour assurer le raccord des deux zones de maillage employées. Le maillage n’a donc pas besoin d’être conforme c’est-à-dire que les nœuds du maillage en rotation et du domaine ne sont pas obligés de correspondre le long de cette interface.
Figure 16: Schéma de la définition du domaine de calcul en 2D.
Le domaine considéré pour l’étude 3D est illustré à la Figure 17. Ce dernier utilise toutefois un plan de symétrie passant en son centre de manière à diviser le domaine en deux sections symétriquement égales pour ainsi diminuer le temps de calcul d’un facteur 2.
21
Figure 17: Schéma de la définition du domaine de calcul en 3D.
Le coefficient de blocage des domaines 2D et 3D définit comme étant :
𝜀 = (𝐴𝑇𝑢𝑟𝑏𝑖𝑛𝑒
𝐴𝐷𝑜𝑚𝑎𝑖𝑛𝑒) × 100, (1.12)
est le même que ceux des simulations des références (Boudreau & Dumas (2017) et Villeneuve, et al. (2020)), soit 1.3% en 2D et de 0.17% en 3D.
22
1.2 Solveur fluide et solide
Toutes les simulations 2D présentées dans ce mémoire ont été réalisées sur la version 1712 du logiciel OpenFOAM. Le code utilisé est basé sur la librairie de couplage développée par Olivier (2014). Dans la résolution de ce couplage fluide-structure le domaine fluide est résolu avec un code de volume fini de deuxième ordre alors que le solide est quant à lui résolu avec un solveur d’élément fini utilisant les fonctions d’Hermite. Pour assurer la stabilité numérique du couplage, un terme de compressibilité artificielle est ajouté dans les cellules en contact avec le corps déformable. Les détails de l’algorithme de couplage ainsi que la définition de la compressibilité artificielle peuvent être retrouvés dans la thèse d’Olivier (2014). D’un autre côté, les simulations menées en 3D ont été réalisées sur la version 2019.2 du logiciel commercial STAR CCM+ de Siemens.
De plus, en raison du grand nombre de simulations requises et de la complexité de la physique en jeu, il a été décidé d’utiliser la forme instationnaire des équations de Reynolds moyennées (URANS) avec le modèle de turbulence 𝑘-𝜔 SST pour la résolution de l’écoulement.
1.2.1 Équations gouvernant le fluide
Les équations gouvernant le domaine fluide devant être résolues afin de simuler l’écoulement autour des turbines sont les équations de Navier-Stokes. Il est ainsi question de l’équation de quantité de mouvement se définissant comme:
𝜕𝐯
𝜕𝑡+ 𝐯 ∙ ∇𝐯 = −∇ (
𝑝 𝜌𝑓
) + 𝜈∇2𝐯, (1.13)
où 𝐯 et 𝑝 sont respectivement les champs de vitesse et de pression du fluide. De même que l’équation de continuité définie comme:
∇ ∙ 𝐯 = 0. (1.14)
Tel que mentionné précédemment, la résolution de ces équations a été réalisée via une discrétisation du domaine fluide avec la méthode des volumes finis. Il s’agit actuellement de la méthode la plus utilisée pour la résolution de ce type de problématique. Également, la résolution en 2D et 3D de ces équations a été réalisée en utilisant une approche découplée pour le calcul de la vitesse et de la pression avec l’algorithme SIMPLE pour «Semi-Implicit Method for Pressure-Linked Equation » (Patankar & Spalding, 1972). Tel que son nom l’indique, l’algorithme SIMPLE classique utilise une équation pour la correction de pression afin de
23
fermer le système permettant ainsi la résolution des équations de Navier-Stokes. C’est cette technique qui est utilisé dans le logiciel StarCCM+ alors qu’une variante très similaire est utilisée dans OpenFOAM.
1.2.2 Équations gouvernant le solide
La modélisation du solide a été réalisée avec deux approches différentes. La première approche est utilisée pour la résolution de la problématique 2D. Cette dernière est réalisée suivant la même méthodologie que celle développée par (Olivier, 2014). Ce dernier a utilisé une méthode d’éléments finis basée sur les polynômes d’Hermite pour la résolution de sections de plaques planes déformables. Étant donné que la structure interne de la pale n’est pas déterminée à ce stade-ci, il a été convenu que la pale considérée dans la présente analyse 2D possède une raideur constante dans le sens de la corde (𝐸𝐼′=
𝑐𝑡𝑒). La résolution de ce problème revient donc à résoudre le même problème qu’une plaque plane déformable. Cependant, étant donné que cette étude est réalisée dans un premier temps pour explorer l’espace paramétrique du problème, cette approximation permet d’éliminer la dépendance à la structure interne de la pale. De plus, il est envisageable qu’une rigidité uniforme soit effectivement obtenue lors de la fabrication d’une vraie pale en utilisant une conception interne judicieuse. Allant dans ce sens, les équations différentielles du déplacement de la pale (𝑑𝑥, 𝑑𝑦) dans l’espace x-y selon le référentiel de la Figure 16 sont définies comme suit:
𝜌𝑠𝑒 𝜕2𝑑𝑥 𝜕𝑡2 = 𝜕 𝜕𝑥[𝑁 ′(1 +𝜕𝑑𝑥 𝜕𝑥)] + 𝜕 𝜕𝑥(𝑀 ′𝜕 2𝑑 𝑦 𝜕𝑥2) + 𝜕 𝜕𝑥2(𝑀 ′𝜕𝑑𝑦 𝜕𝑥) − 𝑝 𝜕𝑦 𝜕𝑥+ 𝜏 (1 + 𝜕𝑑𝑦 𝜕𝑥), (1.15) 𝜌𝑠𝑒 𝜕2𝑑𝑦 𝜕𝑡2 = 𝜕 𝜕𝑥(𝑁 ′𝜕𝑑𝑦 𝜕𝑥) − 𝜕2 𝜕𝑥2[𝑀 ′(1 +𝜕𝑑𝑥 𝜕𝑥)] − 𝜕 𝜕𝑥(𝑀 ′𝜕 2𝑑 𝑥 𝜕𝑥2) − 𝑝 (1 + 𝜕𝑥 𝜕𝑥) − 𝜏 𝜕𝑑𝑦 𝜕𝑥, (1.16)
où (𝑝) est la pression du fluide et (𝜏) est le cisaillement à la paroi de la pale déformée. On note que ces équations sont écrites en suivant une approche lagrangienne rapportée sur la configuration initiale (non déformée) de la structure. En utilisant la théorie des poutres d’Euler-Bernoulli, il est possible de fermer le système en ajoutant deux équations additionnelles décrivant les forces normales internes (𝑁′) et le moment interne (𝑀′). 𝑁′ = 𝐸𝑒𝑒̃ = 𝐸𝑒 [𝜕𝑑𝑥 𝜕𝑥 + 1 2(( 𝜕𝑑𝑥 𝜕𝑥) 2 + (𝜕𝑑𝑦 𝜕𝑥) 2 )], (1.17) 𝑀′ = 𝐸𝐼′𝜒̃ = 𝐸𝐼′ [𝜕 2𝑑 𝑦 𝜕𝑥2 + (1 + 𝜕𝑑𝑥 𝜕𝑥) − 𝜕𝑑𝑦 𝜕𝑥 𝜕2𝑑𝑥 𝜕𝑥2], (1.18)
24
où 𝑒̃ est la déformation de Green-Lagrange et 𝜒̃ est la courbure modifiée de la poutre déformée (Epstein & W. Murray, 1976). Les paramètres géométriques définis à la section 2.1 sont repris ici. En effet, 𝑒 est l’épaisseur du profil de la pale (ici, l’épaisseur maximale du profil est utilisée), 𝐸 son module de Young et 𝐼′ son inertie de section. Tel que mentionné précédemment, le produit 𝐸𝐼′est considéré constant dans l’étude
2D.
La deuxième approche employée a trait au problème 3D. Étant donné que la mécanique des solides étudie le déplacement d’un domaine solide sous l’action d’une force ou d’une contrainte, les lois fondamentales qui régissent la mécanique des solides en 3D sont les mêmes lois qui décrivent la mécanique des fluides, à savoir la conservation de la masse, de la quantité de mouvement et de l’énergie. De plus, pour un solide, il est plus naturel de représenter ces équations sous leur forme Lagrangienne. Ainsi, sous cette forme, l’observateur suit le solide dans sa déformation dans l’espace et le temps. Il va de soi que, sous cette approche, la masse est toujours conservée. En effet, la masse 𝑀 qui est contenue dans un volume de contrôle matériel en déformation va par définition toujours demeurer la même que celle présente dans le volume initialement non déformé :
𝑀 = ∫ 𝜌(𝑡)𝑑𝑉 =
𝑉
∫ 𝜌𝑜𝑑𝑉 = 𝑐𝑡𝑒 𝑉𝑜
(1.19)
Également, l’équation de déplacement et de déformation d’un corps solide est gouvernée par l’équation d’équilibre de Cauchy. Cette dernière exprime la conservation de la quantité de mouvement d’un solide. Dans une approche lagrangienne, les termes de convection disparaissent et la dérivée temporelle de la vitesse est réduite à la dérivée partielle seconde du déplacement :
𝜌𝒖̈ − ∇ ∙ 𝝈 − 𝒃 = 0, (1.20)
où u est le vecteur de déplacement du corps solide, le paramètre b est le vecteur de force sur le corps par unité de volume et σ est le tenseur de contraintes symétrique (c’est-à-dire que 𝝈 = 𝝈𝑇). L’équation (1.20)
est sujette à des conditions aux limites de Dirichlet et de Neumann qui se traduisent respectivement comme des conditions sur les déplacements (𝒖 = 𝒖̅) et des conditions sur les chargements (𝜏 = 𝝈 ∙ 𝒏 = 𝝉̅ ). Une formulation alternative du problème peut être exprimée sous la forme du principe du travail virtuel. Cette approche est particulièrement adaptée à la discrétisation par la méthode des éléments finis. C’est notamment cette approche qui est employée dans le logiciel STAR CCM+ (2018) pour la résolution du
25
domaine solide. Pour obtenir la dérivée selon le principe du travail virtuel, l’équation (1.20) est multipliée par une fonction test (𝛿𝒖) et intégrée sur le domaine.
𝛿𝛱 = ∫ 𝛿𝒖
𝑉
∙ (𝜌𝒖̈ − ∇ ∙ 𝝈 − 𝒃) 𝑑𝑉 = 0. (1.21)
Cette formulation utilise comme fonction test le déplacement virtuel (𝛿𝒖), qui doit satisfaire les conditions aux limites de type Dirichlet.
Comme pour les simulations 2D, les simulations 3D considèrent la non-linéarité géométrique produite par les déformations. Cela permet ainsi de modéliser les déplacements et les rotations importants. Pour les phénomènes géométriquement linéaires (petits déplacements) et les matériaux linéaires, les équations d'équilibre sont linéaires et peuvent être satisfaites dans la configuration non déformée. Pour les phénomènes géométriquement non-linéaire (grands déplacements), les équations d'équilibre doivent être transformées pour être exprimées dans la configuration non déformée, ce qui induit la non-linéarité dite géométrique. Pour résoudre ces équations, STAR-CCM+ met à jour la matrice de rigidité à l'aide d’une méthode d'itération de Newton. À chaque itération, le solveur direct résout le système d'équations linéarisées. Notons que, dans cette étude, la loi de comportement d’un solide élastique linéaire est utilisée. La non-linéarité provient donc exclusivement des grands déplacements.
1.2.3 Modélisation de la turbulence
Bien qu’il existe plusieurs modèles de turbulence les plus communs sont le modèle à une équation de transport de Spalart-Allmaras SA (Spalart & Allmaras, 1994), le modèle à deux équations 𝑘-𝜀 (Chien, 1982) ainsi que le modèle 𝑘-𝜔 (Wilcox (1988) et Wilcox (2008)) ou sa variante la plus connue 𝑘-𝜔 SST (Menter, 1994). Le modèle utilisé dans le présent mémoire est le modèle 𝑘-𝜔 SST qui est en fait une combinaison du modèle 𝑘-𝜀 et du modèle 𝑘-𝜔. En effet, ce dernier reproduit le comportement du modèle 𝑘-𝜔 près des parois alors que la résolution du champ loin de la paroi est plutôt attributaire au comportement du modèle 𝑘-𝜀. Pour ce qui est de la résolution des équations jusqu’à la paroi, deux approches sont envisageables. La première méthode la plus commune consiste à utiliser une loi de paroi permettant ainsi de diminuer le nombre de cellules nécessaire à la résolution des couches limites. Cette approche se veut basée sur l’existence d’une région logarithmique dans le profil de vitesse de la couche limite turbulente. Le modèle 𝑘-𝜀 utilise une loi de paroi pour résoudre la couche limite alors que les modèles SA et 𝑘-𝜔 résolvent les équations URANS jusqu’à la paroi, ce qui veut dire que le maillage doit être résolu jusqu’à la paroi pour l’utilisation adéquate des modèles SA et 𝑘-𝜔. Le critère communément admis pour l’évaluation du maillage près de la paroi est le critère de qualité 𝑦+ (Gersten, 2017) défini comme :