Bonnette de test d’optique adaptative pour
l’Observatoire du Mont Mégantic
Mémoire
William Deschênes
Maitrise en physique
Maitre ès sciences (M. Sc.)
Québec, Canada
© William Deschênes, 2016
Bonnette de test d’optique adaptative pour
l’Observatoire du Mont Mégantic
Mémoire
William Deschênes
Sous la direction de :
Simon Thibault, directeur de recherche
Jean Pierre Veran, codirecteur de recherche
Jean-François Lavigne, codirecteur de recherche
iii
Résumé
Les télescopes de grande envergure requièrent des nouvelles technologies ayant un haut niveau de maturité technologique. Le projet implique la création d’un banc de test d’optique adaptative pour l’évaluation de la performance sur le ciel de dispositifs connexes. Le banc a été intégré avec succès à l’observatoire du Mont Mégantic, et a été utilisé pour évaluer la performance d’un senseur pyramidal de front d’onde. Le système a permis la réduction effective de la fonction d’étalement du point d’un facteur deux. Plusieurs améliorations sont possibles pour augmenter la performance du système.
iv
Abstract
New technologies for large scale telescope projects need to reach a high level of technological maturity before they can be integrated. The project involves the creation of an adaptive optics test bench for evaluating the on-sky performance of adaptive optics related devices. The test bed was successfully installed on the Mont Mégantic observatory, and was used to evaluate the performance of a pyramid wavefront sensor. The system effectively halved point-spread function size. Several improvements to the system are possible to improve performance.
v
Table des matières
Résumé ... iii
Abstract ... iv
Table des matières………..v
Table des tableaux ... vii
Table des figures ... viii
Table des équations ... ix
Table des acronymes ... x
Remerciements : ... xi
1
Introduction ... 1
1.
Théorie ... 2
1.1
Aberrations optiques ... 2
1.1.1
Théorie géométrique ... 2
1.1.2
Types d’aberration ... 4
1.2
Théorie diffractive des aberrations ... 8
1.2.1
Les polynômes de Zernike ... 8
1.2.2
Métriques importantes ... 10
1.3
Correction de front d’onde ... 11
1.3.1
Conjugaison de phase [4] ... 11
1.3.2
Caractérisation du front d’onde ... 11
1.3.3
Reconstruction ... 12
1.3.4
Correction du front d’onde et limitations ... 14
1.4
Technologies & Dispositifs d’AO ... 16
1.4.1
Senseurs de front d’onde ... 16
1.4.2
Correcteurs de front d’onde ... 20
1.5
Sources d’aberration en imagerie astronomique ... 24
1.5.1
Aberrations du système [4] ... 24
1.5.2
Aberrations atmosphériques ... 24
1.5.3
Théorie de la turbulence ... 25
1.5.4
Effets de la turbulence ... 26
1.5.5
Transmittance de l’atmosphère ... 27
2
Conception de la bonnette ... 28
vi
2.1.1
Requis de mission ... 28
2.1.2
Conditions d’opération ... 28
2.1.3
Caractéristiques de système d’AO ... 30
2.2
Disposition de la bonnette ... 35
2.2.1
Définition mécanique ... 35
2.2.2
Ports d’entrée ... 36
2.2.3
Ports de sortie ... 37
2.3
Disposition optique ... 38
2.3.1
Système de calibration ... 39
2.3.2
Caméra science ... 41
2.3.3
Validation/Caractérisation théorique du système ... 42
2.4
Disposition informatique ... 47
3
Résultats expérimentaux ... 48
3.1
Résultats en laboratoire ... 48
3.1.1
Qualité optique ... 48
3.1.2
Qualité de correction : ... 50
3.1.3
Caméra science: ... 53
3.1.4
Fréquence de correction ... 55
3.2
Résultats au télescope ... 57
3.2.1
Première séquence d’observation ... 58
3.2.2
Deuxième séquence d’observation ... 58
3.2.3
Qualité optique ... 58
3.2.4
Qualité de front d’onde ... 60
3.2.5
Caméra science ... 63
3.2.6
Fréquence de correction sur le télescope ... 67
4
Améliorations du système ... 68
4.1
Avancées informatiques ... 68
4.2
Conception optique ... 68
4.3
Mesures & calibrations additionnelles ... 69
4.4
Ressources externes ... 69
5
Conclusion ... 70
vii
Table des tableaux
Table 2.1 : Caractéristiques d’observation à l’OMM [2] [1] ... 29
Table 2.2 : Contraintes mécaniques sur le télescope ... 30
Table 2.3 : Caractéristiques du modèle DM 97-15 ... 31
Table 2.4 : Caractéristiques du SHS optocraft personnalisé ... 31
Table 2.5 : Caractéristiques de la caméra science Andor IXON Ultra-888 ... 32
Table 2.6 : Caractéristiques du port de sortie 1 ... 37
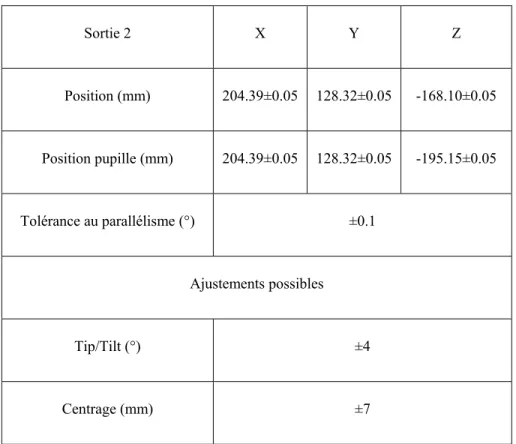
Table 2.7 : Caractéristiques de la sortie 2 ... 37
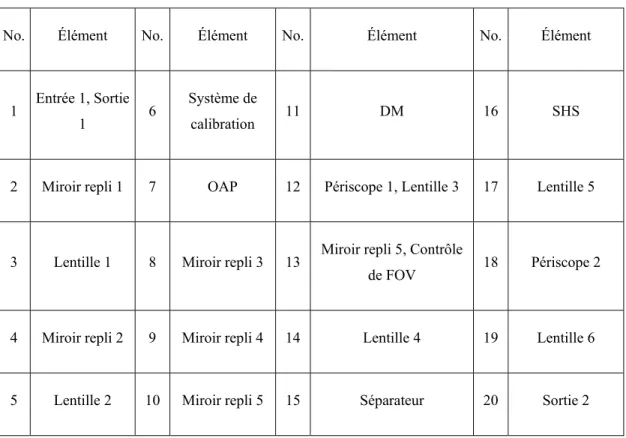
Table 2.8 : Éléments de la Figure 2.4 ... 39
Table 2.9 : Caractéristiques de la plaque de phase ... 40
Table 2.10 : FOV selon la sortie, avec iris ouvert (max) et fermé (min) ... 43
Table 2.11 : Valeurs (en Waves) des différents polynômes de Zernike ... 44
Table 3.1 Transmission de puissance dans le système optique, position selon la Figure 0.8.
... 49
Table 3.2 Qualité de front d’onde en fonction du mode, aberrations statiques ... 50
Table 3.3 Analyse de front d’onde corrigée avec une plaque de phase, SHS ... 51
Table 3.4 Qualité de front d’onde en laboratoire, PWFS vs SHS ... 53
Table 3.5 : FWHM pour un différent nombre de modes corrigés ... 54
Table 3.6 Fréquence de boucle ... 55
Table 3.7 Taille de l’obscuration & du spot ... 59
Table 3.8 Qualité de front d’onde sur le télescope, PWFS vs SHS ... 60
Table 3.9 Qualité de front d’onde en fonction du mode, selon le senseur de front d’onde
utilisé; Vert : changement positif; Rouge : changement négatif; Jaune : changement
négligeable. ... 62
Table 3.10 FWHM des PSF de la Figure 3.3 ... 64
Table 3.11 FWHM des PSF de la Figure 3.4 ... 65
Table 3.12 FWHM des PSF de la Figure 3.5 ... 66
Table 3.13 Fréquence de boucle du système sur le télescope ... 67
viii
Table des figures
Figure 1.1 Aberrations géométrique [2] ... 3
Figure 1.2: Représentation de l’aberration sphérique [2] ... 6
Figure 1.3: Représentation de la coma [2] ... 6
Figure 1.4: Représentation de l’astigmatisme [2] ... 7
Figure 1.5: Représentation de l’aberration chromatique [2] ... 8
Figure 1.6: Représentation schématique du SHS [5] ... 17
Figure 1.7 : Schéma de pixels 2x2 d’un SHS ... 17
Figure 1.8: Représentation schématique du PWFS [6] ... 19
Figure 1.9 : Carte des indices de pupille ... 19
Figure 1.10 : Format de DM à surface continue, a) actuateurs de position, b) actuateurs de
force, c) actuateurs de tension d) miroirs monolithiques [4] ... 21
Figure 1.11 : Format de DM à surface discontinue [4] ... 22
Figure 1.12 Transmittance atmosphérique selon la longueur d’onde [9] ... 27
Figure 2.1 Configuration optique du télescope de l’OMM [3] ... 30
Figure 2.2 Nombre d’actuateurs requis en fonction de la qualité de front d’onde corrigée
(
800
) ... 32
Figure 2.3 : Schéma de coordonnées de la bonnette; les flèches rouges indiquent la position
du point de référence, avec les flèches colorées indiquant les axes (x,y,z) ... 36
Figure 2.4 : Schéma des éléments optiques de la bonnette. La ligne rouge représente le
trajet optique, avec les barres bleues représentant les positions de la pupille. ... 38
Figure 2.5 : Disposition optique du système de calibration ... 40
Figure 2.6 : Système optique de la caméra scientifique ... 41
Figure 2.7 : Tube de jonction de la caméra science, a) vue complète b) vue de l’optique .. 42
Figure 2.8 : Vignetting selon le champ de vue, caméra science ... 42
Figure 2.9 : Vignetting miminal selon le champ de vue, SHS ... 43
Figure 2.10 : Vignetting minimal selon le champ de vue, WFS test ... 43
Figure 2.11 : Caractéristiques de l’ordinateur de contrôle ... 47
Figure 3.1 Vignetting du faisceau de sortie du système, haut; a) SHS, b) PWFS ... 48
Figure 3.2 Image des senseurs sur le télescope ... 59
Figure 3.3 Étoile Arcturus, PSF, correction par SHS a) boucle ouverte, b) boucle fermée
(50 modes) ... 64
Figure 3.4 Étoile Arcturus, PSF, correction par PWFS a) boucle ouverte b, c, d) boucle
fermée à différent moments (12 modes) ... 64
Figure 3.5 Étoile Vega, PSF, correction par PWFS a) boucle ouverte b, c, d) boucle fermée
à différents moments (12 modes). ... 65
ix
Table des équations
1.1 ... 3
1.2 ... 4
1.3 ... 9
1.4 ... 10
1.5 ... 10
1.6 ... 12
1.7 ... 12
1.8 ... 13
1.9 ... 13
1.10 ... 13
1.11 ... 13
1.12 ... 14
1.13 ... 15
1.14 ... 15
1.15 ... 15
1.16 ... 15
1.17 ... 16
1.18 ... 16
1.19 ... 17
1.20 ... 18
1.21 ... 18
1.22 ... 19
1.23 ... 19
1.24 ... 26
1.25 ... 26
2.1 ... 32
2.2 ... 33
2.3 ... 33
2.4 ... 34
2.5 ... 34
x
Table des acronymes
OMM……….Observatoire du Mont-Mégantic
INO……….Institut National d’Optique (de québec)
AO………Optique Adaptative (Adaptive Optics)
PWFS………Senseur de Front d’Onde Pyramidal (Pyramid WaveFront Sensor)
OAP………Parabole Hors-Axe (Off-Axis Parabola)
PSF………Fonction d’Étalement de Point (Point Spread Function)
FWHM………Full Width Half Maximum
DM………Miroir Déformable (Deformable Mirror)
MEMS………...Micro Electro Mechanical Systems
SHS………Senseur Shack-Hartmann (Shack-Hartmann Sensor)
OPD………Différence de Chemin Optique (Optical Path Difference)
STD………..…Déviation Standard (Standard Deviation)
xi
Remerciements :
Mon escouade de co-directeurs, Simon Thibault, Jean-Pierre Veran et Jean-François Lavigne, pour leur support et leurs connaissances durant ce long processus.
Denis Brousseau et Olivier Martin pour leurs connaissances techniques & théoriques sans égal. Bernard Malenfant, technicien extraordinaire, pour son assistance à l’observatoire du Mont Mégantic. Ma famille, qui m’a supporté de loin pendant ces études.
Les membres des Seigneurs de Naguère, qui m’ont permis de maintenir ma santé mentale en sortant du milieu de travail.
1
1 Introduction
Les projets de télescope de très grande envergure présentent un grand nombre de défis, dont les aberrations causées par la turbulence atmosphérique. Les systèmes d’AO permettent d’éliminer ces effets et d’obtenir une qualité d’image comparable ou meilleure à celle des télescopes spatiaux. Une boucle de rétroaction, composée d’une optique déformable et d’un senseur de front d’onde, permet d’éliminer les aberrations et d’aplanir le front d’onde.
Le développement de dispositifs associés à l’AO est encore en effervescence, avec plusieurs exemples de senseurs de front d’onde en développement au Canada. Avant de pouvoir utiliser ces technologies dans les projets de grande envergure, il est nécessaire d’augmenter leur niveau de maturité technologique en montrant leur efficacité hors du laboratoire.
L’objectif de ce projet implique la création d’une bonnette de test pour les dispositifs reliés à l’AO, qui sera ensuite utilisée pour l’évaluation de la performance d’un exemplaire de ceux-ci. La bonnette est conçue pour être utilisée à l’Observatoire du Mont Mégantic (OMM), un observatoire de recherche scientifique situé au sud du Québec. Le système est développé avec l’aide d’ABB inc. Systèmes de mesure.
Ce projet est effectué en collaboration avec l’Institut National d’Optique (INO), qui développe un senseur de front d’onde pyramidal (PWFS). Ce senseur, déjà en utilisation dans certains télescopes, a eu très peu d’analyses comparatives pratiques avec le senseur Shack-Hartmann (SHS), le standard en AO. Ce banc permettra une analyse directe en parallèle de la performance de ces deux senseurs de front d’onde. Avec ces résultats, nous désirons augmenter le niveau de maturité technologique des PWFS.
Ce mémoire se sépare en 4 parties. Dans un premier temps, la théorie relative à l’AO est montrée, présentant la théorie des aberrations, le fonctionnement des systèmes d’AO, les contraintes de l’AO et les nombreuses technologies reliées. Dans un deuxième temps, la conception du système est présentée. Nous commençons par une revue des contraintes et spécification de l’OMM, suivis des différentes caractéristiques mécaniques et optiques du système final. Dans un troisième temps, les résultats obtenus avec le système sont présentés. Les résultats obtenus en laboratoire et sur le télescope de l’OMM sont évalués et discutés, tout en énonçant les contraintes de chacun des environnements. Finalement, nous présentons les améliorations nécessaires pour optimiser le système dans l’avenir, basés sur les résultats présentés dans la section précédente.
2
1. Théorie
1.1 Aberrations optiques
Les aberrations optiques étant une source primaire de problèmes d’imagerie, il est nécessaire de bien les comprendre. La section suivante passe en revue la théorie des aberrations optiques, leurs types ainsi que leurs sources principales dans le cadre de l’astronomie.
1.1.1 Théorie géométrique
L’optique paraxiale présente une version simple de l’optique qui est applicable en prenant en compte de nombreuses approximations. Premièrement, nous considérons une ouverture infinie. Ceci simplifie grandement toute représentation puisque nous ne prenons pas en compte les conditions limites et de diffraction. Deuxièmement, tout calcul est considéré une extension de la région paraxiale, une zone près de l’axe optique où le comportement des rayons est très facile à évaluer. Ces mêmes calculs sont utilisés pour estimer le comportement des rayons très distant de cette zone. Ces considérations nous donnent ce qui est appelé l’image paraxiale, la position idéale de l’image après un système optique. Ces équations classiques sont développées au chapitre 4.3 du Born and Wolf [1].
Les ouvertures limitées, les grands-angles observés et les grands champs de vue rendent les approximations mentionnées plus tôt très peu utiles. Nous voulons avoir le comportement réel d’un système. La théorie des aberrations optiques géométriques définit toute divergence des rayons de la position de l’image paraxiale comme étant une aberration. Du point de vue ondulatoire, l’aberration est vue comme une divergence du front d’onde par rapport à un front d’onde sphérique idéale. Ces perspectives sont largement équivalentes, puisque les rayons sont, par définition, perpendiculaires aux fronts de phase. Un développement mathématique plus exhaustif est résumé ici [1].
3
Figure 1.1 Aberrations géométrique [2]
Considérant , la taille d’un objet placé sur l’axe à la position , , ainsi que , ), les coordonnées polaires où un rayon croise l’ouverture d’un système optique, nous pouvons calculer la position , ) de l’image. Nous considérons un système à symétrie radiale. Une évaluation exacte de la position de l’image est impossible pour tout sauf les cas les plus simples. Il est toutefois possible de développer une formulation générale à base de série de puissances. Celle-ci est basée sur une « fonction d’aberration » qui représente la contribution de chaque effet. Nous obtenons les expressions incomplètes suivantes.
cos cos 2 cos 2 3 cos ⋯
sin sin sin 2 sin ⋯ 1.1
Dans les équations précédentes, et sont des coefficients reliés aux premiers et troisièmes ordres des aberrations. Chacun de ces coefficients sont reliés à l’imagerie de paraxiale; par exemple, est la magnification. Une définition plus exhaustive de ces paramètres peut être trouvée à la section 5.5 du Born & Wolf [1]. Des termes d’ordres plus élevés existent, mais sont négligés dans ce contexte, car leur effet est petit comparativement aux ordres plus élevés. Il est à noter que l’absence d’ordres pairs est une conséquence de la symétrie radiale du milieu.
Les termes de premier ordre sont associés à l’imagerie paraxiale. Les termes de troisième ordre sont les divergences les plus importantes de cet état idéal, et sont appelés les aberrations de Seidel, et sont détaillés dans la section 1.1.2.
4
Il est à noter qu’un deuxième formalisme construit autour de la propagation du front d’onde est aussi utilisé. Plutôt que considérer chaque point de l’image, la différence de trajet optique (« optical path difference » ou OPD en anglais) est utilisée pour évaluer les aberrations. Quoique la méthode géométrique soit efficace pour des aberrations importantes, cette méthode est plus efficace pour des petites quantités d’aberrations. Les équations suivantes, dans un formalisme similaire aux équations de rayon, sont utilisées.
∑ cos
1.2
Dans l’équation précédente, nous avons l’OPD , le coefficient , le champ normalisé , la distance normalisée par rapport à l’axe , l’orientation , et , et sont les indices de l’ordre de l’aberration. Il est à noter que est de nature semblable aux coefficients et mentionnés plus tôt.
Ce formalisme est important à cause de sa symétrie rotationnelle qui correspond mieux aux systèmes optiques traditionnels, telle la majorité des télescopes et microscopes. Il est à noter que les ordres indépendants de la pupille telle que , , 0,0,0 ainsi que ceux entièrement dépendants du champ tel que , ,
, 0,0 sont ignorés. Quand l’expression est développée avec des exposants spécifiques utiles, nous retrouvons les différents types d’aberrations qui sont définis à la section suivante.
1.1.2 Types d’aberration
Avec le développement de l’équation 1.2, Seidel a codifié les différents types d’aberrations et a créé des expressions analytiques pour chacune des aberrations primaires. La section qui suit présente ces aberrations. Les aberrations de plus haut ordre les plus notables sont généralement de forme similaire, mais sont souvent négligeables.
5
Tableau 1.1: Abberations communes et termes de Seidel
Terme Aberration Polynôme
Défocus Tilt cos Sphérique Coma cos Astigmatisme cos Courbure de champ Distorsion cos
Il est à noter que les deux premiers termes, le défocus et le tilt, ne sont pas toujours considérés comme étant des aberrations. Cependant, du point de vue mathématique il est pertinent de les représenter.
1.1.2.1 Défocus
Le défocus représente une variation de l’image par rapport à la position idéale du foyer. Elle est facile à corriger en déplaçant la position de prise d’image. Elle est indépendante du champ de vue et a une symétrie polaire.
1.1.2.2 Tilt
Le tilt est la déviation dans la direction de la propagation de la lumière. Elle est facile à corriger en déviant le faisceau. Du point de vue ondulatoire, le tilt représente une composante angulaire uniforme sur tout le front d’onde.
6
1.1.2.3 Sphérique
L’aberration sphérique est définie comme la variation de la distance focale selon l’ouverture [2]. Celle-ci est observée quand les rayons, passant par une surface sphérique loin de l’axe optique, sont focalisés loin du focus paraxial, mais sur l’axe optique. Le plus loin nous sommes de l’axe, le plus intense est l’aberration.
Figure 1.2: Représentation de l’aberration sphérique [2]
Nous observons plusieurs expressions de l’aberration sphérique. La distance séparant le focus paraxial et le point de croisement de l’axe, AB sur la Figure 1.4, est appelé l’aberration sphérique longitudinale. La distance entre le focus paraxial et le croisement vertical, soit AC sur la Figure 1.2, est appelée l’aberration sphérique transverse. Celle-ci est indépendante du champ de vue et se comporte comme un défocus d’ordre plus élevé.
1.1.2.4 Coma
L’aberration de la Coma est définie comme étant la « variation de la magnification avec l’ouverture » [2]. Elle est observée quand les rayons, passant à travers un élément optique à un angle oblique, sont focalisés à différentes hauteurs en fonction de la hauteur et l’angle d’entrée.
Figure 1.3: Représentation de la coma [2]
Cette aberration est plus notable pour des systèmes ayant des champs de vue élevés et a une forte dépendance angulaire.
7
1.1.2.5 Astigmatisme
L’aberration de l’astigmatisme est définie comme étant la variation de la position de l’image selon la verticale ou l’horizontale. Elle se présente comme un éventail de rayon (ray fan) qui se focalise différemment selon l’axe observé.
Figure 1.4: Représentation de l’astigmatisme [2]
Cette forme d’aberration est surtout observée avec des rayons obliques qui perçoivent un focus effectif différent selon l’axe, comme la Figure 1.4 présente. Elle peut aussi être observée dans des lentilles qui ne sont pas véritablement sphériques, et peut être induite par toute composante qui ne conserve pas la symétrie radiale du système. Elle essentiellement un tilt d’ordre plus élevé.
1.1.2.6 Courbure de champ
La courbure de champ représente la tendance naturelle des systèmes optiques de produire un plan image courbée. Ceci cause un estompement de l’image puisqu’elle ne peut se concorder avec la forme plane du détecteur. Cette courbure est représentée par la surface de Petzval, qui donne la courbure de champ fondamentale du système.
1.1.2.7 Distorsion
La distorsion est une déformation généralisée de l’image selon la hauteur du faisceau, donnant une « courbure » visible à l’image. Cette aberration est surtout importante pour l’imagerie grand champ. Les bords de l’image courbent, donnant une apparence « bombée » à l’image.
8
1.1.2.8 Chromatique
L’aberration chromatique provient de la variation des propriétés de la matière en fonction de la longueur d’onde d’une onde électromagnétique. L’exemple le plus marquant est l’utilisation d’un prisme pour séparer la lumière blanche en un spectre de couleurs. Ainsi, les éléments optiques transmissifs tel les lentilles focalisent différentes longueurs d’onde à différents endroits, en fonction de l’indice de réfraction.
Figure 1.5: Représentation de l’aberration chromatique [2]
Quoi que cette aberration soit peu importante ou même négligeable dans des systèmes quasi monochromatiques, elle est très significative pour toute forme d’observation spatiale qui tente de récupérer un maximum de photons d’un spectre plus large.
1.2 Théorie diffractive des aberrations
Malgré l’utilité des termes de Seidel dans la représentation d’aberrations, les approximations deviennent moins exactes quand il devient nécessaire de considérer des aberrations ayant une amplitude moins importante. La théorie diffractive des aberrations permet de prendre en compte ces échelles, et de faire un traitement plus juste. Cependant, le traitement complet est complexe et peu nécessaire pour la correction de front d’onde. Ainsi, la section suivante discute d’un résultat important de cette théorie, les polynômes de Zernike.
1.2.1 Les polynômes de Zernike
Pour obtenir les termes de Seidel, nous avons précédemment étendu une fonction d’aberration en série de puissance. La théorie diffractive des aberrations propose une nouvelle fonction d’aberration. En étendant celle-ci en série de puissance, nous obtenons les polynômes de Zernike, une représentation polaire et orthonormée des aberrations. Ainsi, la représentation de chaque aberration est indépendante de toutes les autres. Le développement complet des polynômes peut être trouvé à l’annexe VII du Born et Wolf [1]. En utilisant le développement en polynômes de Zernike, nous avons l’expression suivante de l’OPD.
9
cos 1.3
Dans l’équation (3), nous avons le facteur de normalisation, un coefficient constant, l’expression radiale des termes de Zernike, le rayon normalisé, l’angle et , et sont les indices de l’ordre. Dans un cadre théorique, il est possible de calculer ces paramètres, mais leur évaluation est surtout faite par méthode empirique.
Tableau 1.2: Termes de Zernike importants [3]
l n m Aberration
1 0 0 1 Piston
2/3 1 1 2 cos / 2 sin Tilt
4 2 0 √3 2 1 Défocus
5/6 2 2 √6 cos /√6 cos Astigmatisme
7/8 3 1 √8 3 2 cos /√8 3 2 sin Coma
9/10 4 0 √8 cos 3 /√8 sin 3 Trèfle
11 4 0 √5 6 6 1 Sphérique
Des ordres plus élevés existent, mais les termes de 1 à 11 sont celles ayant l’amplitude la plus importante en imagerie astronomique. Il est à noter que les termes 1 à 4, soit le piston, le tilt et le défocus ne sont pas toujours considérés des aberrations. Ils ont cependant une importance fondamentale mathématique, et il est donc nécessaire de bien les décrire. Le piston représente une translation uniforme du front d’onde, n’a aucun impact sur la qualité d’image, et est imperceptible avec les senseurs de front d’onde traditionnels. Le tilt représente une variation angulaire uniforme du plan du front d’onde. C’est souvent le terme observé avec le plus d’amplitude. Il n’a aucun impact sur la qualité d’image s’il est constant.
10
Dans le cadre de l’observation astronomique et de l’optique adaptative, ces polynômes sont utilisés pour la représentation d’aberrations. Cependant, la majorité des télescopes présentent une image annulaire, non circulaire, à cause de l’obscuration centrale du miroir secondaire des télescopes réflectifs. Ceci a mené à la création des polynômes de Zernike annulaires. Quoi qu’ils fassent une représentation plus exacte pour des cas extrêmes, le formalisme circulaire présente une exactitude suffisante pour le projet.
1.2.2 Métriques importantes
1.2.2.1 Ratio de Strehl
Le ratio de Strehl, aussi connu sous le nom d’intensité normalisé, est une mesure qui compare l’intensité d’un faisceau aberré et celui d’un faisceau idéal. Ceci est évalué en négligeant la contribution du tilt statique, toujours présent sur le faisceau. Ce ratio est utilisé comme élément indicatif de la qualité de la propagation d’un faisceau, et est la métrique primaire pour indiquer la qualité d’un système d’AO. Tout système aberré a un ratio 1.
1.4
L’équation 1.4 est une approximation communément utilisée pour représenter le ratio de Strehl, où est la variance du front d’onde observé. Cette approximation est valide pour de petites aberrations, telles que sont considérées les aberrations des turbulences. Un système qui contient un ratio 0.8 est considéré limité par la diffraction.
1.2.2.2 Budget d’erreur
Le budget d’erreur est une métrique qui indique la somme des différentes causes de variation sur une mesure donnée. Dans le contexte présent, nous considérons le budget d’erreur sur la variance du front d’onde, exprimé à l’équation 1.5.
1.5
Chaque terme en représente différents éléments qui contribuent à la variance du front d’onde, assumant que celles-ci sont non-corélées. Ces « erreurs » sont associées à chaque composante du système électronique, mécanique et optique, ainsi que les conditions d’observation.
11
1.3 Correction de front d’onde
La section suivante détaille les méthodes importantes utilisées dans la correction de front d’onde, et passe en revue les technologies utilisées pour cette correction. Ceci peut être utilisé autant dans un grand nombre de systèmes optiques pour corriger les aberrations et obtenir la meilleure image possible.
1.3.1 Conjugaison de phase [4]
La conjugaison de phase est le cœur de l’optique adaptative. Cette méthode implique la compensation géométrique d’une avance ou délai de front de phase en changeant le trajet optique. Dans le cas d’une conjugaison réflective, ceci implique la réflexion de certaines portions du front d’onde avant d’autres. Dans le cas d’une conjugaison transmissive, ceci implique changer l’indice de réfraction perçue par certaines parties du front d’onde. De manière simpliste, nous multiplions un champ | | par son conjugué | | .
La conjugaison de phase dans des cas réels est très compliquée cependant. Il est nécessaire d’identifier l’amplitude nécessaire pour la conjugaison, ainsi que l’endroit et au moment, puisque les aberrations de l’atmosphère varient dynamiquement. Ces trois contraintes (amplitude, position, temps) sont à l’origine des complexités de l’AO astronomique.
Pour effectuer la conjugaison de phase, nous devons premièrement évaluer les aberrations à corriger, ensuite tenter de corriger les aberrations avec un DM, puis faire une rétroaction pour atteindre une qualité de front d’onde constante.
1.3.2 Caractérisation du front d’onde
La première étape de correction implique la caractérisation des aberrations. Ceci est effectué par utilisation d’une étoile guide, une source de lumière près de la cible pour déterminer les effets du trajet optique. Il est à noter que plusieurs termes sont d’origine astronomique; l’étoile guide était originalement une étoile brillante près de l’étoile cible. L’information de phase est détectée de deux manières, soit zonale ou modale, dépendant du type de système de mesure.
L’expression du front d’onde par coefficients des différents modes de Zernike représente la méthode modale. Ici, l’information des modes est déduite directement en utilisant des phénomènes de diffraction. La méthode est avantageuse pour la détection d’aberrations de bas ordre. La détection d’ordres plus élevés est possible, mais complexe.
L’expression du front d’onde par l’OPD sur des sections discrètes (zones) représente la méthode zonale. L’ouverture où est passé le front d’onde est décomposée en un nombre de sous-ouvertures, où → ∞ donne une représentation exacte du front d’onde. Cette méthode est plus simple pour la mesure d’ordres
12
d’aberration plus élevée, et fait une représentation continue du front d’onde. Dans un système utilisant un senseur zonal, le nombre de zones est approximativement équivalent au nombre de modes corrigés. [4]
1.3.3 Reconstruction
La reconstruction réfère au front d’onde, et à comment nous traitons l’information qui y est reliée. Comme indiqué à la section 1.3.2, l’information obtenue peut être mise en format modal ou zonal; des calculs permettent de passer de l’un à l’autre. L’information doit ensuite être passée dans un format compatible au correcteur de front d’onde. Quoi qu’il existe plusieurs différents types de senseurs, la section suivante considère l’utilisation d’un senseur de pente, qui détecte la pente locale pour ensuite ressortir une représentation du front d’onde.
1.3.3.1 Reconstruction zonale
Avec la matrice des pentes du front d’onde , il est possible de reconstruire la matrice de phase à l’aide de la matrice de géométrie .
1.6
est construite en prenant en considération le rapport géométrique entre la pente d’une surface et la position de ses sous-éléments. L’équation peut aussi indiquer le bruit avec un facteur . Il suffit alors d’inverser la matrice pour obtenir la solution. Ceci n’est pas une tache simple, puisque les matrices obtenues sont singulaires et non-inversible. Il faut donc utiliser des matrices pseudo-inverses qui contiennent les propriétés requises.
, ∗
1.7
L’étape finale nous donne ∗ , la matrice de reconstruction de la phase. Celle-ci peut s’avérer être très
complexe en fonction de la méthode exacte de pseudo-inversion.
Avec la matrice de phase obtenue précédemment, il est possible d’établir un vecteur d’amplitude de tous les actuateurs d’un correcteur, par l’entremise de la matrice d’influence . Un actuateur représente tout moteur responsable d’un mouvement. La matrice d’influence représente l’effet de l’action d’un actuateur sur l’entièreté du correcteur.
13
1.8
Comme dans les cas précédents, une pseudo-inversion de permet d’obtenir en connaissant . Les commandes réelles sont obtenues en multipliant le vecteur par un gain prédéterminé. Il est à noter que la construction de la matrice d’influence est très importante. La réponse des actuateurs peut être différente selon la position sur le correcteur. Il est généralement assumé que la réponse des actuateurs est linéaire, mais certains types de correcteurs peuvent avoir une réponse non linéaire et/ou avoir de l’hystérésis. Ainsi, il est critique de bien construire la matrice d’influence.
L’utilisation d’une phase modale est presque équivalente à utiliser une phase continue. Sachant que le front d’onde est composé d’une somme de modes de Zernike Ψ modulés par le coefficient , nous retrouvons l’équivalence suivante.
Ψ 1.9
Tout comme dans le cas précédent, il suffit de faire la pseudo inversion de .
1.3.3.2 Reconstruction modale
La reconstruction des pentes en modes de Zernike considère la phase comme étant une somme de polynômes modulés d’un coefficient , pour un nombre total de modes .
,
1.10
La pente étant effectivement la première dérivée de la phase, nous pouvons obtenir l’expression suivante pour le rapport entre la pente et le vecteur des coefficients des modes.
∙
14
Ici, est le vecteur des dérivées du front d’onde selon et , et est la matrice des dérivées des modes de Zernike. La solution est trouvée avec la pseudo-inverse ∗ . Il faut faire attention de choisir un nombre
approprié de modes à considérer, puisqu’un nombre excessif de modes par rapport aux données disponibles peut faire apparaitre des modes comme perturbation sur les modes plus bas, créant une forme d’aliasing. Un correcteur modal travaille sur un principe similaire. Pour une mesure de phase continue , , il suffit de considérer que la représentation sur le correcteur sera une somme de modes Ψ connus modulés par un coefficient .
Ψ 1.12
Si nous utilisons des modes orthogonaux pour le correcteur, la matrice est diagonale et l’inversion du système matriciel est simple. Autrement, il suffit d’utiliser la pseudo-inversion.
Pour une mesure de phase modale, ceci peut être assez complexe. Dans certains cas, tel un DM bimorphe et un senseur de front d’onde par courbure, il est possible d’avoir une correspondance directe entre les modes du senseur et du correcteur. Cependant, ces cas sont peu fréquents, et ne sont pas élaborés ici.
1.3.3.3 Processus de contrôle
Pour pouvoir effectuer le processus de correction, il est nécessaire d’avoir un processus de contrôle qui encadre l’entièreté du système. Les systèmes de contrôle utilisés en AO peuvent généralement être séparés en deux types : le contrôle de procédé et les servomécanismes.
Le contrôle de procédé tente de maintenir une métrique à une valeur fixe. Les servomécanismes tentent plutôt de varier la sortie d’un système en rapport à une entrée variable. Ces deux types de contrôle sont considérés « à rétroaction » (ou à boucle fermée), puisqu’il y a le retour d’un effet sur sa propre cause. Un faisceau lumineux entre dans le système, le système mesure le front d’onde, puis affecte le faisceau lumineux par l’entremise du correcteur, changeant la mesure perçue. Il existe des systèmes qui fonctionnent sans rétroaction, mais ils ne sont pas adressés dans le cadre de ce projet.
1.3.4 Correction du front d’onde et limitations
Un système de correction est par la suite utilisé pour ajuster la propagation du front d’onde. Pour des fins pratiques, le correcteur indiqué ici est le miroir déformable (DM), le correcteur le plus communément utilisé en AO astronomique. Le DM tente de correspondre à la forme du front d’onde pour compenser les aberrations. Il est à noter que ce processus est aussi imparfait, puisqu’aucun DM ne peut parfaitement correspondre à l’erreur de phase induite par l’atmosphère. Nous induisons donc une erreur de fitting .
15
1.13
L’erreur dépend de la longueur de cohérence , de la distance entre les éléments de correction du DM , et du paramètre de correspondance . Chaque DM comporte un nombre d’éléments de correction, souvent appelés actuateurs, qui sont les éléments mobiles qui permettent une variation de la forme du miroir. Le paramètre de correspondance provient de la fonction d’influence d’un actuateur, une fonction représentant l’effet d’un actuateur sur le front d’onde. Nous pouvons estimer de nombre d’actuateurs nécessaires pour obtenir un ratio de Strehl désiré pour une qualité de fit donné. [4]
4 ln 1 1.14
Il est à noter que le nombre d’actuateurs est approximativement égal au nombre de degrés de liberté du système. Nous pouvons ainsi voir que le nombre de modes à considérer dépend de la qualité de front d’onde désirée. Elle est évaluée considérant la fréquence de coupure du système et la fréquence de Greenwood de la turbulence, un indicateur de la vitesse du vent local, défini à la section 1.5.3.2.
1.15
Le bruit des senseurs utilisés impose aussi certaines limites. Pour un nombre de photons, , la longueur d’onde et la longueur d’onde moyenne de la plage d’observation , nous avons l’équation 1.16.
2 1.16
Il est à noter que des versions spécifiques de l’équation 1.16 à certains types de senseurs, et seront explicités dans la section 1.4.1.
Un autre facteur contribuant à l’erreur est l’anisoplanétisme, soit l’effet de la différence de trajet de front d’onde entre l’étoile guide et la cible. Pour une différence d’angle entre les deux sources, la variance du front d’onde est comme suit.
16
1.17
, l’angle isoplanétique, est un facteur évalué à partir de la turbulence locale à partir de la longueur de cohérence et la caractéristique moyenne de turbulence .
0.31 1.18
Tous ces termes de variance peuvent être additionnés, donnant le budget d’erreur du système et nous permettant d’estimer le ratio de Strehl du système après correction.
∑ 1.19
1.4 Technologies & Dispositifs d’AO
La section précédente ait parlé de la correction de front d’onde en général. La section suivante discute des différents dispositifs utilisés. L’emphase est mise sur le senseur de front d’onde, « l’œil » du système, et le DM, le « bras » du système.
1.4.1 Senseurs de front d’onde
Il existe un peu de variété parmi les senseurs utilisés pour évaluer les fronts d’onde. La section qui suit discute de différents types de senseurs communément utilisés.
1.4.1.1 Senseurs Shack-Hartmann
La technologie la plus communément utilisée dans le milieu astronomique, le senseur Shack-Hartmann (SHS) est un senseur de pente. Un faisceau est projeté sur une matrice de microlentilles, qui focalisent des portions du faisceau sur des matrices de pixels. La position du point focal sur cette matrice indique la pente locale du front d’onde. En considérant la pente sur chaque microlentille, il est possible de reconstruire le front d’onde.
17
Figure 1.6: Représentation schématique du SHS [5]
Pour une utilisation idéale, chaque microlentille doit correspondre à une aire de diamètre sur le primaire du télescope utilisé, prenant en compte le grandissement et la longueur d’onde d’observation. Ainsi, chaque microlentille correspond à la zone minimale corrigeable pour les conditions atmosphériques locales.
Les senseurs sont généralement composés d’une matrice de microlentilles disposées au-dessus d’une CCD, avec chaque matrice de pixels sous-jacentes étant 2x2 ou plus, dépendant de la précision et sensibilité désirée. Étendue sur plus de pixels, il y a moins de flux par pixel réduisant le SNR.
Figure 1.7 : Schéma de pixels 2x2 d’un SHS
Comme nous pouvons voir à la figure précédente, le point focal est distribué sur 4 pixels dans ce cas. Un centroïde est fait de la position du spot pour bien déterminer le déplacement ∆ du spot par rapport au centre de la microlentille. Ce déplacement est relié à la première dérivée phase , selon l’équation 1.20.
18
Nous avons la magnification du système, la distance focale des lentilles et le nombre d’onde. Le déplacement ∆ , est évalué en considérant l’intensité dans chacun des 4 pixels du senseur pour un spot de diamètre .
≅
2 ; ≅2 1.21
Ainsi, nous retrouvons le tilt local, et pouvons facilement retrouver , par calcul numérique.
Le SHS présente l’avantage d’être simple à implémenter et très robuste. Le SHS présente surtout le désavantage d’avoir de la difficulté à mesurer de forts tilts. Comme nous pouvons observer à la Figure 1.7, si le point focal ne touche plus aux 4 pixels, la mesure devient inexacte. Si le tilt est assez important, il est même possible que le point focal atteigne les pixels sous les microlentilles voisines. Certaines méthodes, tel qu’une mesure absolue du tilt, peuvent compenser pour les effets d’un fort tilt statique, permettant de déplacer la position effective des pixels et ainsi d’obtenir une mesure exacte.
À cause de son utilisation commune, l’expression de la variance ajoutée au front d’onde par le senseur est bien connue. Elle est évaluée connaissant le ratio signal sur bruit, , le diamètre des microlentilles et la taille de spot focal.
2√2 3 2 / 1.22
1.4.1.2 Senseur pyramidal
Le senseur pyramidal (PWFS) est un senseur récent qui est réputé d’avoir une plus grande sensibilité que le SHS [6]. Le PWFS utilise un faisceau focalisé sur la pointe d’une pyramide qui est ainsi séparé en 4 sous-ouvertures. Dans un cas idéal, les 4 sous-images ont une intensité égale. Cependant, tout rayon aberré est transmis à une des sous-images et pas aux autres. En comparant l’intensité à des points équivalents dans chaque sous-image, il est possible de reconstruire le front d’onde. Les PWFS modulent la position du focus autour de la pointe de la pyramide pour augmenter la gamme dynamique en permettant de compenser pour des aberrations qui déplacent le front d’onde de la pointe. Ceci permet notamment de mesurer des tilts très importants. La somme des images prises durant cette modulation est utilisée pour reconstruire le front d’onde, augmentant le SNR. Le patron de modulation (généralement circulaire) permet de contrôlé la linéarité de la mesure.
19
Figure 1.8: Représentation schématique du PWFS [7]
L’image nous présente les 4 pupilles qui nous permettent de trouver la pente du front d’onde, tel qu’indiqué à la Figure 1.8. Dans ce contexte, la pente est calculée en utilisant les équations 1.23 et 1.24.
Figure 1.9 : Carte des indices de pupille
, sin 1.23
20
Ces expressions permettent de trouver la pente moyenne sur la pupille si l’intensité sur chaque pupille est considérée. La pente locale sur chaque sous-ouverture (pixel) est trouvée en comparant les pixels équivalents de chaque pupille. Par la suite des méthodes de calcul numérique sont utilisées pour retrouver la phase
, à partir de la dérivée.
Le PWFS présente quelques avantages. Il est plus sensible aux aberrations de bas ordre. Premièrement, la variation du focus sur la pointe de la pyramide induit des changements de flux plus important sur ses 4 images que le faisceau d’une microlentille sur 4 pixels sous-jacents. Deuxièmement, la modulation permet un contrôle direct de la gamme dynamique, et définit une fréquence de spatiale de coupure, agissant comme un filtre passe-bas. Ceci empêche des problèmes d’aliasing induits pas les fréquences spatiales plus élevées que peut être détectés par le senseur. Finalement, l’utilisation d’une image permet une flexibilité sur la taille des sous pupilles, nous permettant d’augmenter la collection de flux en regroupant des pixels, nous permettant de guider sur des étoiles très faibles.
Le PWFS à le désavantage de se fier sur un élément transmissif, une pyramide, ce qui rend difficile l’achromaticité sur large bande impossible. Cependant, l’utilisation d’une paire de prismes pour substituer la pyramide peut permettre d’avoir une moyenne bande achromatique. Le PWFS est aussi très sensible à l’alignement. Il faut pouvoir garantir le positionnement du faisceau près de la pointe durant toute la modulation, ce qui rend la qualité d’alignement des pièces critique, ainsi que la reproductibilité mécanique. La présence d’un élément mobile pour le contrôle est désavantageuse pour la robustesse long-terme du système.
1.4.1.3 Senseurs à courbure
Les senseurs à courbure (CS) utilisent la comparaison de l’intensité devant et derrière un point focal pour retrouver la courbure de champ, la deuxième dérivée du front d’onde. L’avantage principal de ces senseurs est que leur format de détection épouse bien la forme de DM de type bimorphes, présentés à la section 1.4.2.4.
1.4.2 Correcteurs de front d’onde
Les correcteurs de front d’onde sont une composante intégrale de tout système d’AO, tel qu’indiqué plus tôt. La section suivante discute des différents types de DM, ainsi que d’autres technologies associées tels les modulateurs à cristaux liquides, un équivalent transmissif au DM.
1.4.2.1 Surface Continue vs Discontinue
La méthode de déformation d’un miroir déformable à un impact important sur la qualité de correction effectuée par la surface. La méthode de déformation sépare les DM en deux groupes majeurs. La première, soit les DM à surface continue, inclus les miroirs bimorphes, à actuation magnétique ainsi que certains miroirs
21
MEMS (micro electro-mechanical systems). La deuxième, soit les DM à surface discontinue, inclut les miroirs MEMS ainsi que les modulateurs spatiaux de lumière (SLM). Dépendant du type utilisé, la qualité de « fitting », le raccord entre la surface théorique et réelle, varie de façon notable, selon le facteur utilisé dans l’équation 1.13.
Tableau 1.3: Facteur de fitting selon la surface [4]
Type de surface
Continue 0.28
Discontinue 1.26
Discontinue 3-axes 0.18
1.4.2.2 Surfaces continues
Figure 1.10 : Format de DM à surface continue, a) actuateurs de position, b) actuateurs de force, c) actuateurs de tension d) miroirs monolithiques [4]
Un DM peut utiliser une seule grande surface qui est déformée pour obtenir la forme désirée pour la correction du front d’onde. Une surface plane assez rigide pour être polie mais assez flexible pour être déformée est utilisée dans ce contexte. Une série d’actuateurs sont utilisés pour ainsi déformer des points spécifiques de la surface pour obtenir la forme voulue.
22
Ce type de DM présente plusieurs avantages. Notamment, l’erreur de fitting est plus basse que celle d’un système à surface discontinue avec le même nombre d’actuateurs. Ceci peut devenir important puisque le cout d’un actuateur peut s’avérer très important. L’erreur est moins importante puisque les surfaces déformées peuvent bien correspondre à la forme des polynômes de Zernike.
Il existe plusieurs désavantages à l’utilisation de ces DMs. Puisque tous les actuateurs sont attachés à la même surface, la réponse des actuateurs est non locale, nécessitant de prendre en compte l’effet d’un actuateur sur ses voisins. Ceci allonge le temps de calcul et peut réduire la fréquence de correction d’un système d’AO.
1.4.2.3 Surfaces discontinues
Figure 1.11 : Format de DM à surface discontinue [4]
Un DM peut utiliser une série de petits miroirs discrets (appelé segments) pour obtenir la forme désirée pour la correction de front d’onde. Un miroir rigide est fixé à un ou plusieurs actuateurs. Ces miroirs, placés en configuration appropriée, sont ensuite déplacés individuellement pour atteindre la forme désirée.
Le nombre d’actuateurs par segment permet de mieux positionner le miroir et donc d’obtenir une meilleure correction. Ainsi, un DM avec un actuateur par segment obtient une erreur de fitting bien plus importante qu’un miroir à surface continue. Cependant, un système à trois actuateurs peut obtenir une erreur de fitting moins significatif.
1.4.2.4 Miroirs bimorphes
Les DM bimorphes sont composés d’une plaque mince de verre collée sur une plaque de céramique piézoélectrique. La surface de verre est polie et couverte d’une mince couche d’un métal réflecteur. Entre ces deux plaques est placée une électrode continue, et sur l’arrière de la plaque piézoélectrique il y plusieurs électrodes indépendantes.
Un voltage appliqué sur ces électrodes déforme la surface piézoélectrique et permet de contrôler la forme de l’interface, avec une surface continue. Ceci présente l’avantage mixte que la déformation de la surface est « non-locale », soit que l’application de voltage à une seule électrode déforme la surface entière.
23
1.4.2.5 Miroirs à actuation magnétique
Dans ces DM, des aimants sont attachés sur l’arrière d’une membrane réflective. Des électroaimants placés sous la membrane sont activés pour repousser ou attirer les aimants, déformant la surface réflective de façon locale. Comme les miroirs bimorphes, la déformation de la surface est non-locale.
Ces miroirs présentent l’avantage d’un très grand mouvement absolu, de l’ordre de la dizaine à la centaine de microns, avec un mouvement interactuateur de quelques microns. Ceci permet de facilement compenser pour les bas ordres d’aberrations d’amplitude élevée.
1.4.2.6 Miroirs MEMS
Ces DM utilisent une série de MEMS pour s’activer. Ces DM peuvent être à surface continue ou discontinue; les DM MEMS à surface discontinue sont discutés ici. Ici, chaque actuateur (ou série d’actuateurs) est attaché à une petite surface réflective, avec toutes les surfaces déplacées ensemble pour obtenir la forme désirée. Ces miroirs présentent l’avantage de permettre l’utilisation d’un grand nombre d’actuateurs. Puisqu’ils sont assemblés par des méthodes de microfabrication, le prix par actuateur est considérablement moins élevé que pour d’autres types de DM. Ceci permet la fabrication de DM avec une très grande quantité d’actuateurs, ainsi que des actuateurs très précis. Le désavantage principal est la difficulté de faire le fitting avec la forme des modes de Zernike.
1.4.2.7 Modulateur à cristaux liquides
Le modulateur à cristaux liquides (LCM) est un équivalent transmissif du DM. Une matrice de cellules de cristaux liquides est disposée dans un faisceau de lumière. Une application de tension à ces cellules les permet de moduler la phase, permettant ainsi de changer le front d’onde localement. Ce type de système est cependant très peu utilisé en astronomie; le temps de réponse est lent, et la perte d’intensité par transmission est trop importante pour le milieu astronomique.
1.4.2.8 Miroirs inhabituels
Les DM indiqués dans la section qui suit sont encore dans les phases primaires de développement. Certains n’ont pas encore vu le jour, et d’autres ne sont pas encore perfectionés
1.4.2.8.1 Miroirs activés optiquement
Ce type de DM utilise un laser, balayé sur une surface, pour activer le mouvement d’actuateurs. Ces DM présentent l’avantage d’être moins lourds, puisqu’ils requièrent peu de fils électriques.
24
1.4.2.8.2 Miroirs fluidiques
Ce type de DM utilise une surface de ferrofluide comme surface déformable. Une série d’électro-aimants disposés en dessous du fluide permet de déformer la surface. Ces DM présentent l’avantage d’avoir de très grand déplacement, mais leur temps de réponse est très lent.
1.5 Sources d’aberration en imagerie astronomique
Il y a deux sources principales d’aberration dans le cadre de l’imagerie astronomique. Premièrement, il y a les aberrations provenant du système en soi. Les sources incluent les imperfections des composantes optiques, les erreurs d’alignement et le mouvement du système. Deuxièmement, il y a la turbulence atmosphérique. Cette turbulence dévie la lumière provenant des étoiles brouillant les images. Le vent peut aussi causer des vibrations du télescope, induisant des vibrations dans le système optique. La section suivante présente ces sources en plus grand détail.
1.5.1 Aberrations du système [4]
Les erreurs d’alignement et le « jitter »1 sont des sources importantes de tilt qui peuvent être introduites dans
le système. Le tilt étant souvent la source la plus importante d’aberration dans le système, il est critique de bien le contrôler. Le jitter peut être induit par la vibration du système, venant de moteurs, de systèmes de contrôle de température ou de vent qui frappe le télescope.
La distorsion thermale est une autre source importante d’erreur. La distorsion thermale de l’enceinte du système peut causer des désalignements en changeant légèrement la position des optiques. Une distorsion thermale des optiques peut déformer des composantes optiques, changeant les distances focales. Ces effets sont généralement causés par des extrêmes de température dans l’environnement.
Les erreurs manufacturières sont aussi une source notable d’erreur. La déviation des paramètres optimaux des optiques est toujours présente. De plus, certaines méthodes de polissage peuvent avoir une composante périodique qui induit des aberrations à très haute fréquence spatiale. Ceux-ci peuvent masquer des aberrations autres qu’il serait désirable de corriger.
1.5.2 Aberrations atmosphériques
Dans un cadre d’observation astronomique, les aberrations atmosphériques sont souvent les plus importantes. Pour la turbulence minimale observable au québec, il n’y a aucune différence de résolution entre un télescope de 18 cm de diamètre et un télescope de 18 mètres. Cette section explicite les phénomènes causant cette dégradation du front d’onde, ainsi que le vocabulaire associé.
25
Le « seeing » décrit les effets de turbulence généralisée de l’atmosphère à un point sur la terre. Elle est exprimée en arc seconde, où 1 équivaut à 4.8 . La valeur est basée sur le FWHM de la PSF du système qui effectue les observations. Sans compensation, le seeing atmosphérique peut être aussi bas que 0.45 et aussi élevé que 4.0 dans le proche infrarouge [4].
Un télescope tel l’observatoire du Mont Mégantic, avec un miroir primaire de 1.6 m, requiert un seeing en dessous de 0.1 . Les très grands télescopes en développement requièrent des seeing encore plus petits qui ne peuvent pas être trouvés sur la terre. Nous pouvons ainsi voir l’importance de l’AO pour corriger ces aberrations et obtenir un seeing désirable.
1.5.3 Théorie de la turbulence
Puisque la turbulence atmosphérique à petite échelle est un phénomène d’apparence aléatoire, des méthodes statistiques sont utilisées pour prédire son comportement. Un grand nombre de papiers ont été écrits pour tenter de comprendre le comportement, avec les écrits de Kolmogorov [8] ayant fournis la base qui est devenu le standard dans le cadre de l’AO [3] [9].
L’atmosphère est considérée comme un espace de gaz où des masses d’air de densités variées se déplacent. Il est à noter que l’indice de réfraction de l’air varie de façon notable avec la variation de vitesse et de densité. À certaines échelles, ces masses d’air se déplacent de façon aléatoire, ce qui est nommé la turbulence. Pour tenter de maitriser cette turbulence, nous utilisons des modèles statistiques pour la représenter.
Ces modèles considèrent une fonction de structure où est considérée une portée variant de la taille du plus petit tourbillon ( ) au plus grand ( ). En dessous de , de l’ordre du mm, les effets de viscosité thermique dominent. Au-dessus de , de l’ordre de la dizaine à la centaine de mètres, le comportement arrête d’être isotrope. Kolmogorov considère les cas idéaux de → ∞ et → 0.
Cette variation d’indice de réfraction selon les tourbillons est utilisée pour étudier un « power spectrum density » de ce qui est transmis à travers l’atmosphère. Ces modèles statistiques donnent un indicateur théorique de la distribution de l’indice de réfraction dans l’atmosphère [4].Ces modèles permettent de définir quelques paramètres essentiels pour la caractérisation de l’atmosphère.
1.5.3.1 Paramètre de Fried
La longueur de cohérence , aussi appelé le paramètre de Fried, représente le diamètre maximum permis d’un collecteur de lumière avant que la distorsion atmosphérique limite la performance de façon notable. Ce paramètre est utilisé comme indicatif de la qualité des conditions atmosphériques à un endroit donné sur la Terre. L’expression mathématique de ce paramètre est comme suit.
26
| 1.68 / 1.25
Nous avons | , paramètre de fried pour une onde plane, la constante de structure de l’atmosphère, la longueur de propagation et le nombre d’onde. Il est cependant rare que l’expression soit utilisée, puisque la constante de structure est difficile à déterminer. L’évaluation empirique est généralement préconisée. Il existe des équations similaires pour les ondes sphériques qui peuvent être trouvées dans le Tyson [4].
Le paramètre / , soit le diamètre de l’ouverture du télescope sur la longueur de cohérence, est important dans l’évaluation des aberrations induites par la turbulence. Il représente le plus petit élément possible de corriger sur l’ouverture du télescope, donnant le nombre minimum d’actuateur requis sur la longueur d’un diamètre du télescope.
1.5.3.2 Fréquence de greenwood
Les effets de haute fréquence spatiale causés par la vitesse du vent sont estimés en utilisant la fréquence de Greenwood . Cette fréquence représente la largeur de bande requise pour une correction optimale du front d’onde. Pour une vitesse de vent constante et un paramètre de Fried nous avons l’expression suivante.
0.43 1.26
La valeur de la fréquence varie de la dizaine à la centaine de Hz, dépendant de la position géographique.
1.5.4 Effets de la turbulence
Tyson [4] énonce 3 différents effets principaux de la turbulence atmosphérique sur une étoile. Nous avons le
scintillement, une variation d’intensité aléatoire causée par l’interférence d’ondes d’une même étoile ayant
des trajets atmosphériques légèrement différents. Il ya a le frissonnement, une variation d’angle moyen d’arrivée du faisceau causé par les variations d’indice de réfraction dans l’atmosphère. Il y a finalement la
diffusion, soit un élargissement de la tâche d’Airy causé par des aberrations à haute fréquence spatiale induit
par la turbulence de l’atmosphère. Ces trois effets de la turbulence sont les plus importantes et son sujet à correction. D’autres phénomènes existent, telles l’absorbance moléculaire et la dispersion sur les aérosols, mais sont généralement négligeables.
27
1.5.4.1 Scintillement
Le scintillement est la variation d’intensité due à l’interférence entre les faisceaux déviés d’une même étoile. Elle est produite par des tourbillons de l’ordre√ , avec la longueur d’onde et la longueur de propagation . Le scintillement est plus perceptible avec des petites ouvertures telle la pupille de l’œil. Elle est dépendante de la vitesse du vent et varie dynamiquement avec le temps.
1.5.4.2 « Beam wander » ou tilt
Le déplacement du faisceau provient de l’angle changeant du faisceau provenant de la source. Le déplacement rapide est nommé « jitter », et le déplacement lent est nommé « drift ». Du point de vue des aberrations, ceci cause une variation dynamique du tilt du front d’onde.
Un seul paramètre est utilisé pour faire la compensation de ce phénomène, soit la fréquence de Greenwood de tilt .
1.5.4.3 Aberrations de haut ordre
Les ordres d’aberration plus élevés, et ainsi de fréquence spatiale plus élevée proviennent surtout de tourbillons plus petits que la dimension du faisceau. Ces tourbillons peuvent, après plusieurs couches, peuvent affecter la cohérence de la lumière observée, et ainsi étendre le faisceau. Ces phénomènes ont plus d’effet sur les lasers émis dans l’atmosphère, mais peuvent avoir un certain effet sur l’image du télescope.
1.5.5 Transmittance de l’atmosphère
Figure 1.12 Transmittance atmosphérique selon la longueur d’onde [10]
Il est important de noter que dans toute situation d’observation astronomique, il est nécessaire de bien identifier la plage de longueurs d’onde que nous désirons observer. Tel qu’indiqué à la Figure 1.12, il existe plusieurs « plages » de transmittance plus élevées qui sont favorisées pour l’observation astronomique. Les plages principales de transmission sont dans les spectres visible et radio. Cependant, il existe des fenêtres plus limitées dans l’infrarouge.
28
2 Conception de la bonnette
Ce projet implique la création d’une bonnette d’AO pour l’OMM, qui servira à la caractérisation et la validation de technologies en développement. Cette section inclut les spécifications requises ainsi que le détail de la bonnette.
2.1 Évaluation des spécifications
La section suivante décrit les spécifications requises pour le système. Celles-ci sont basées sur les requis du de mesure et les conditions d’opération.
2.1.1 Requis de mission
Comme énoncé dans l’introduction, ce projet vise la création d’une bonnette d’AO pour l’observatoire du mont Mégantic. Cette bonnette existe pour permettre la caractérisation de plusieurs dispositifs reliés à l’AO en développement. Ceci permettra d’augmenter leur niveau de maturité technologique.
Ainsi, ce système doit comporter à son cœur un système d’AO conventionnel, avec des « branches » optiques additionnelles qui permettront une évaluation du comportement des dispositifs. Nous devons donc pouvoir accueillir des senseurs de front d’onde visiteur. Nous devons aussi avoir un SHS standard qui permet la comparaison de la performance. Dans le cas présent, nous sommes associés avec l’INO qui en train de développer un PWFS, et désire le tester sur le télescope. Pour valider le fonctionnement, nous désirons aussi évaluer la performance du système en laboratoire, pour permettre la validation des analyses plus complètes que nous pouvons faire en laboratoire.
Certains requis sont moins restrictifs. Premièrement, puisque le système n’a pas une mission d’observation, il est moins important de minimiser les pertes de flux. La mission peut donc être effectuée sur des étoiles très brillantes. De plus, puisque nous effectuons une mission de validation technologique, nous pouvons nous restreindre à corriger la lumière de notre étoile-guide.
2.1.2 Conditions d’opération
Connaissant les requis du système, il est nécessaire d’établir les conditions d’opération. Le télescope choisi pour le projet est l’Observatoire du Mont Mégantic (OMM), choisi pour son accessibilité ainsi que l’expérience pour la validation de nouveaux dispositifs pour l’astronomie, dont SpIOMM le précurseur de SITELLE. Ainsi, le système est adapté pour prendre en compte les conditions de l’OMM.
29
2.1.2.1 L’observatoire du mont Mégantic
L’OMM est un télescope Ritchey-Chrétien de 1.6 de diamètre situé dans le sud de la province du Québec. Selon des mesures faites précédemment à l’observatoire [11] [12] , elle tient les caractéristiques indiquées dans la Table 2.1. Sa configuration optique se trouve à la Figure 2.1. La configuration présente inclut un miroir secondaire actif, ce qui permet un déplacement du plan focal . Il est à noter que les métriques , sont des valeurs typiques, qui peuvent varier de façon notable dépendant des conditions climatiques locales.
Table 2.1 : Caractéristiques d’observation à l’OMM [12] [11]
1.6 152.4 50~100 86 Configuration /8 Température ( ) 20~30
30
Figure 2.1 Configuration optique du télescope de l’OMM [13]
Il est aussi important de prendre en compte les requis mécaniques du système. L’espace disponible à une bonnette est restreint, ainsi que le poids maximal permis sur le télescope.
Table 2.2 : Contraintes mécaniques sur le télescope
Poids (kg) 100
Volume ( )( 2 2 2
Angulaire ° 60
2.1.3 Caractéristiques de système d’AO
La section suivante, utilisant les conditions d’opération de l’OMM, définit les caractéristiques requis d’un système d’AO à l’OMM. Cependant, puisque seul certains dispositifs sont accessibles à notre utilisation, nous prenons en considération un système préexistant d’AO et tentons de valider ses capacités de correction sur l’OMM. Nous avons aussi été restreints sur l’utilisation des dispositifs avancés du système, dont le DM ALPAO 97-15, un SHS optocraft d’un modèle personnalisé, et la caméra science, modèle Andor iXon3-888.
31
Table 2.3 : Caractéristiques du modèle DM 97-15
97/11 11
13.5
60
3
Le DM est défini par le nombre d’actuateurs , le diamètre de la pupille , le stroke tip/tilt et le stroke interactuateur .
Table 2.4 : Caractéristiques du SHS optocraft personnalisé
35 35 4.8 672 672 8 19 19 4.6 ∆ 380 980
Le SHS est défini par le nombre de microlentilles , le diamètre de pupille , la disposition des pixels de la CMOS , la taille de pixel , le nombre de pixels sous-tendant une micro-lentille et la plage de longueurs d’onde dont l’efficacité quantique dépasse 10% ∆ .
32
Table 2.5 : Caractéristiques de la caméra science Andor IXON Ultra-888
1024 1024
13
∆ 300 1000
La caméra science est définie par la disposition des pixels de la CCD , la taille des pixels , et sa plage de longueurs d’onde dont l’efficacité quantique dépasse 10 % ∆ .
2.1.3.1 Requis du DM
Les DM sont caractérisés principalement par leur capacité de correction de front d’onde. En fonction de la qualité du front d’onde arrivant, ainsi que la correction que nous désirons effectuer, nous obtenons différents requis pour le nombre d’actuateurs et le stroke. Le nombre d’actuateurs pour un correcteur zonal, le même type utilisé par le DM ci-noté, peut être évalué avec l’équation 2.1.
N π 4 D r κ ln 1 S⁄ / 2.1
Sachant qu’un DM à face continue est utilisé, nous savons que κ 0.28. Le graphe suivant montre les résultats pour différents S et r .
![Figure 1.1 Aberrations géométrique [2]](https://thumb-eu.123doks.com/thumbv2/123doknet/6363540.168094/14.918.302.657.111.374/figure-aberrations-géométrique.webp)

![Figure 1.8: Représentation schématique du PWFS [7]](https://thumb-eu.123doks.com/thumbv2/123doknet/6363540.168094/30.918.154.786.117.398/figure-représentation-schématique-du-pwfs.webp)
![Figure 2.1 Configuration optique du télescope de l’OMM [13]](https://thumb-eu.123doks.com/thumbv2/123doknet/6363540.168094/41.918.126.718.103.490/figure-configuration-optique-télescope-l-omm.webp)