Identification automatique des formes de relief par une
approche topologique :
Les canyons sous-marins de l’estuaire du Saint-Laurent
Mémoire
Andres Cortes Murcia
Maîtrise en sciences géomatiques
Maître ès sciences (M. Sc.)
Québec, Canada
Identification automatique des formes de relief par une
approche topologique :
Les canyons sous-marins de l’estuaire du Saint-Laurent
Mémoire
Andres Cortes Murcia
Sous la direction de :
Éric Guilbert, directeur de recherche
iii
Résumé
Une forme de relief est une région reconnaissable par sa forme et ses éléments saillants. L'approche qui sera ici développée vise à automatiser l’identification de formes du relief et sera appliquée aux canyons sous-marins. Les canyons sont des vallées encaissées et incisées dans le fond marin de la pente continentale. Ils représentent les principaux conduits pour le transport des sédiments en provenance du plateau continental vers la plaine abyssale.
Habituellement, l’identification automatisée des formes de relief est réalisée par des traitements d’images basés sur le pixel. Les méthodes traditionnelles exigent la segmentation et la classification d’images. Ces approches calculent des descripteurs locaux tels que la courbure et dépendent de paramètres de seuil fixés par l’utilisateur. D’ailleurs, ce type de classification d’image peut omettre les caractéristiques photo-interprétatives. En général, les photo-interpréteurs reconnaissent des canyons par leur forme globale (ils sont étroits, allongés et ont des pentes raides) et leur position (ils traversent la pente de manière orthogonale), étant observés autour d’une structure saillante qui correspond à la ligne la plus basse ou talweg.
Pour pallier cette difficulté, nous travaillons sur une structure topologique et des méthodes basées sur des approches objets permettant d’extraire les éléments saillants des formes de relief. Ainsi, notre structure de base est illustrée sur un réseau de triangles irréguliers (TIN) généré à partir de données capturées par un sonar multifaisceaux dans l’estuaire du Saint Laurent. À partir du TIN, nous extrayons le réseau de surface pour extraire les éléments structurants des canyons. Ensuite, l’extraction de la ligne du fond du canyon se fait par le regroupement et l’agrégation de segments formant le squelette des canyons. En troisième lieu se réalise la caractérisation des polygones qui représentent les fonds des canyons. Finalement, les résultats sont validés par rapport à une classification fournie par des géomorphologues.
iv
Abstract
Submarine canyons are steep valleys incised into the continental slope. They are the principal channels for sediment flows from the continental shelf to the sea floor. Their importance is primordial for submarine ecosystems since they act as transportation channels for nutrients and organic substances. In addition, submarine canyons are relevant features for geomorphologists because they can explain the origin and evolution of the marine landscape.
Submarine canyons’ extraction involves the automatic identification of submarines elements through geomorphometric approaches or quantitative surface analysis. Traditional methods require image segmentation and classification. These approaches compute discrete local descriptors such as the curvature and depend on threshold parameters chosen by the user. Furthermore, image classification can omit global photo-interpretative characteristics. In general, photo-interpreters identify canyons by their overall shape (narrow, elongated, steep slopes) and position (running across the continental slope in a straight line), observed around salient thalwegs.
We move from pixel classification to an object-oriented approach built on a topological data structure. The surface network is a graph where critical points such as pits and peaks are connected by ridges and thalwegs. Its extraction does not require any parameter. Relevant thalwegs are selected by simplifying the surface network. Simplification parameters are not set locally at pixel level but at the structure level. The valley floor is computed around each thalweg and used to classify canyons and other channels. The method is illustrated on a triangulated irregular network generated from multibeam sounding data from the St-Lawrence estuary (Canada). Results were validated against a manual classification performed by geomorphologists.
v
Table des matières
Résumé ... iii
Abstract ... iv
Table des matières ... v
Liste des tableaux ... viii
Liste des Schémas... ix
Liste des Figures ... x
Liste des Équations ... xii
Remerciements ... xiv
Chapitre 1 - Introduction ... 1
1.1 Mise en contexte ... 1
1.1.1 Intérêt de canyons sous-marins ... 2
1.1.2 La géomorphométrie dans un contexte marin ... 3
1.1.3 Principes de l’identification des formes de terrain ... 3
1.2 Problématique générale ... 5
1.2.1 Problèmes reliés au mode manuel ... 6
1.2.2 Problèmes reliés au mode automatique ... 6
1.3 Question de recherche ... 7
1.4 Hypothèse générale ... 8
1.5 Objectif général ... 10
1.6 Objectifs spécifiques ... 10
1.7 Structure du mémoire ... 11
Chapitre 2 – L’état de l’art ... 14
2.1 Introduction ... 14
2.2 Le cadre conceptuel d’un canyon sous-marin ... 14
2.2.1 Discussion sur la définition des canyons sous-marins ... 16
2.2.2 Exemple d’identification de canyons dans l’estuaire du Saint-Laurent ... 17
2.3 Notions de géomorphométrie ... 18
2.3.1 Extraction des éléments de base du relief ... 20
2.3.2 L’importance de l’échelle ... 22
2.4 Méthodes d’extraction des éléments du relief ... 22
2.4.1 Approche basée sur le pixel du spécifique vers le général ... 22
2.4.2 Approche basée sur l’objet (ensemble de pixels) du général vers le spécifique ... 25
2.5 Discussion par rapport aux méthodes existantes ... 28
Chapitre 3 – Cadre général de la recherche ... 31
3.1 Introduction ... 31
3.2 Cadre Opératoire ... 31
3.2.1 Données utilisées ... 31
3.2.2 Outils de développement ... 32
3.3 Proposition d’une approche basée sur la description qualitative des formes ... 33
3.4 Cadre conceptuel ... 34
3.4.1 Modèle conceptuel du réseau de surface ... 36
3.5 Cadre méthodologique pour l’extraction de canyons ... 38
3.5.1 Triangulation irrégulière ... 38
3.5.2 Construction du réseau de surface ... 40
3.5.3 Simplification du réseau de surface ... 41
3.5.4 Identification des canyons sous-marins ... 43
vi
3.6.1 Utilisation de la structure vectorielle ... 44
3.6.2 L'approche et les formes du relief terrestre ... 44
Chapitre 4 –Construction du réseau de surface... 47
4.1 Introduction ... 47
4.2 Notions générales ... 47
4.2.1 Points critiques ... 47
4.2.2 Lignes critiques ... 48
4.2.3 Consistance topologique ... 49
4.3 Propriétés d’un réseau de surface ... 49
4.4 Méthodes existantes pour la construction du réseau de surface ... 52
4.4.1 Construction de réseau de surface par des polynômes de surface ... 52
4.4.2 Construction et simplification d’un réseau de surface par hiérarchie topologique ... 53
4.5 Approche suivie dans la construction du réseau de surface... 54
4.5.1 Triangulation ... 54
4.5.2 Point Virtuel ... 56
4.5.3 Points dégénérés ... 57
4.5.4 Algorithmes pour la jointure de points ... 60
4.6 Pseudo-codes principaux dans le réseau de surface ... 61
4.6.1 Pseudo-code pour l’extraction de points ... 61
4.6.2 Pseudo-code pour le réseau de surface ... 62
4.6.3 Pseudo-code pour les puits virtuels ... 62
4.7 Résultats préliminaires ... 62
4.8 Discussion par rapport aux méthodes existantes. ... 64
4.8.1. Triangulation Irrégulière ... 65
4.8.2. Inclusion de puits virtuels ... 65
Chapitre 5 – Simplification du réseau de surface ... 67
5.1 Introduction ... 67
5.2. Notions générales ... 67
5.3 Critères de points restreints selon l’intégrité topologique. ... 68
5.4 Discussion sur le niveau de simplification souhaitée ... 70
5.5 Critères de points restreints selon les patrons d’identification des vallées. ... 72
5.5.1 Patrons associés au squelette de la vallée : ... 73
5.5.2 Patrons associés au versant de la vallée : ... 77
5.6 Pseudo code pour la simplification du réseau de surface ... 79
5.6.1 Pseudo code pour la détection de talwegs des canyons ... 79
5.6.2 Pseudo code pour la construction du versant ... 80
5.7 Discussion de l’approche utilisée... 80
Chapitre 6 – Extraction du fond des vallées... 83
6.1 Introduction ... 83
6.2 Extraction du fond de la vallée ... 83
6.2.1 Construction du polygone ... 83
6.2.2 Raffinement des polygones. ... 89
6.3 Distinction des formes de vallées ... 90
6.4 Discussion de l’extraction du fond des vallées ... 94
Chapitre 7 – Analyses de résultats ... 96
7.1 Introduction ... 96
7.2 Discussion par rapport au degré de simplification ... 97
7.3 Discussion par rapport aux seuils fixés ... 101
7.3.1 Variation des seuils dans l’extraction du squelette ... 101
7.3.2 Variation des seuils dans les ramifications du squelette. ... 103
vii
7.4.1 Définition de la pente et du dénivelé ... 103
7.4.2 Distinction des formes de vallées ... 105
7.5 Comparaison avec l’identification manuelle ... 107
7.5.1 Région Pointe-des-Monts ... 108
7.5.2 Région Godbut ... 109
7.5.3 Région Manicouagan ... 109
7.5.4 Région les Escoumins-Manicouagan ... 110
7.5.5Région les Escoumins ... 110
7.5.6 Région Tadoussac ... 111
7.5.7 Région Rive-sud ... 111
7.6 Concordance des résultats avec l’approche manuelle ... 112
Chapitre 8 –Conclusions ... 115
8.1 Introduction ... 115
8.2 Aperçu sur la démarche de recherche... 115
8.2.1 Retour sur la question de recherche ... 115
8.2.2 Retour sur les objectifs ... 116
8.3 Remarques ... 118
8.4 Contributions de notre recherche ... 119
8.5 Perspectives ... 120
viii
Liste des tableaux
Tableau 2.1 : Certains paramètres de base du relief dans la géomorphométrie. [Olaya, 2009]. ... 19
Tableau 3.1 : Relations topologiques du triangle. ... 39
Tableau 3.2 : Coordonnées des sommets. ... 40
Tableau 3.3 : Composants des arêtes. ... 40
Tableau 6.1 : Paramètres calculés pour la distinction du fond de la vallée. ... 91
Tableau 7.1 : Points critiques extraits selon l’échelle du TIN. ... 97
Tableau 7.2. Points critiques de la généralisation des réseaux selon l’échelle du TIN. ... 98
Tableau 7.3 : Évaluation des critères pour la distinction des formes de vallées. ... 106
Tableau 7.4 : Concordance de notre approche par rapport au fond des vallées. ... 112
ix
Liste des Schémas
Schéma 3.1: Cadre méthodologique : étape 1, construction du réseau de surface. ... 41
Schéma 3.2: Cadre méthodologique : étape 2, simplification du réseau de surface. ... 42
Schéma 3.3: Cadre méthodologique : étape 3, identification des canyons sous-marins. ... 43
Schéma 7.1 : Distinction des formes par le critère de la pente. ... 106
x
Liste des Figures
Figure 1.1 : Structure d’un canyon ... 2
Figure 1.2 : Impact écologique d'un canyon. ... 3
Figure 1.3 Traitement d’un MNT basé sur les pixels ... 5
Figure 1.4 : Variation de l’échelle et comportement des classes morphologiques ... 7
Figure 1.5 Structures saillantes d’un élément géographique ... 8
Figure 1.6 : Structure saillante d’un canyon sous-marin ... 9
Figure 2.1 A: Structure du relief marin: Marge Passive ... 15
Figure 2.1 B: Structure du relief marin: Marge Active ... 16
Figure 2.2 Détection des canyons au Saint-Laurent par géomorphologie ... 17
Figure 2.3 : Classification des formes primitives de terrain ... 20
Figure 2.4 : Éléments inclinés et non inclinés dans géomorphométrie ... 20
Figure 2.5 : Fenêtre de 3X3 cellules, format matricielle. ... 21
Figure 2.6 : Carte de formes du relief résultante d’une classification non supervisée. ... 23
Figure 2.7. Sous-bassins et talwegs d’un réseau de drainage ... 26
Figure 2.8 : Segmentation d’images par des zones homogènes. ... 27
Figure 2.9 : Estimation statistique du paramètre de l’échelle ... 27
Figure 3.1 : MNT de l’estuaire du Saint-Laurent (Québec) ... 32
Figure 3.2 : Localisation géographique de la zone d’étude ... 32
Figure 3.3 : Interface cartographique de l'application. ... 33
Figure 3.4 : Squelette et fond d’un canyon sous-marin. ... 35
Figure 3.5 : Représentation des points critiques ... 36
Figure 3.6 : Réseau de surface géométrique d’une surface. ... 37
Figure 3.7 : Composants de la triangulation (triangle, sommet et arête) ... 39
Figure 4.1 : Les points critiques du terrain ... 48
Figure 4.2 : Détection de points critiques dans le TIN ... 48
Figure 4.3 : Union de points critiques par le réseau de surface. ... 49
Figure 4.4 : Graphe tripartite par groupe de couleurs. ... 50
Figure 4.5 : Connexion de deux sous-graphes ... 50
Figure 4.6 : Violation des propriétés dans le réseau de surface. ... 51
Figure 4.7 : Points critiques de la surface et la configuration des vecteurs ... 52
Figure 4.8 a. Section elliptique, b. hyperbolique et c. parabolique ... 53
Figure 4.9 : Point p dans une grille et ses voisins adjacents ... 55
Figure 4.10 : Point p dans le TIN et ses voisins adjacents. ... 55
Figure 4.11 : Une surface de terrain et un puits virtuel sur une sphère. ... 56
Figure 4.12 : Puits virtuels associés aux zones sans information. ... 57
Figure 4.13 : Une région plate dans les cas dégénérés ... 57
Figure 4.14 : Représentation d'une selle de cheval et de singe ... 58
Figure 4.15 : Une liste de voisins d’un col dupliqué ... 60
Figure 4.16 : Le réseau de surface les lignes de contour. ... 61
Figure 4.17 : Réseau de surface obtenu à l’estuaire du Saint Laurent ... 63
Figure 4.18 : Échantillon du réseau de surface au nord de l’estuaire. ... 64
Figure 4.19 : Points reliés à la bordure du domaine ou d’un trou. ... 65
Figure 5.1 Suppression d’un pic dans la simplification du réseau. ... 68
Figure 5.2 : Circuit d’un col-puits.dans la simplification du réseau ... 69
Figure 5.3 : Col associé aux points sans autres connexions. ... 69
Figure 5.4 : Simplification d’un échantillon selon le critère de pondération ... 70
Figure 5.5 : Squelette et versant de la vallée. ... 73
xi
Figure 5.7 : Relation de la distance sur le squelette de la vallée ... 75
Figure 5.8 : Représentation de méandres en vue 2d ... 76
Figure 5.9 : Réseau de surface extrait et sa simplification. ... 76
Figure 5.10 : Définition du versant du squelette. ... 77
Figure 5.11 : Itérations dans la construction du versant ... 78
Figure 5.12 : Définition du squelette du canyon ... 79
Figure 6.1 : Évaluation des sommets sur les crêtes par rapport au seuil fixé. ... 84
Figure 6.2 : Itérations pour la construction du polygone du fond. ... 85
Figure 6.3 : Calcul de la distance orthogonale au talweg. ... 85
Figure 6.4 : Polygone construit conforme à la triangulation. ... 86
Figure 6.5 : Calcul du point dont la pente est égale au seuil. ... 87
Figure 6.6 : Construction du polygone du fond de la vallée. ... 87
Figure 6.7 : Calcul du point dont la pente est égale au seuil. ... 88
Figure 6.8 : Dispersion des sommets du fond de la vallée. ... 89
Figure 6.9 : Suppression des sommets du fond de la vallée par l’écart type ... 90
Figure 6.10 : Calcul de la moyenne de la largeur du fond. ... 91
Figure 6.11 : Formes identifiées dans l'estuaire ... 92
Figure 6.12 : Comparaison des résultats des approches ... 93
Figure 6.13 : identification manuelle des formes de vallées. ... 93
Figure 6.14 : Identification des formes de vallées dans notre approche. ... 94
Figure 7.1 : Comparaison de réseau de surface sans simplification. ... 97
Figure 7.2 : Généralisation du réseau de surface sans simplification. ... 98
Figure 7.3 : Extraction du fond des vallées à partir d’une triangulation sans simplifier. ... 99
Figure 7.4. Extraction du fond des vallées à partir d’une triangulation simplifiée. ... 99
Figure 7.5 : Échantillon des canyons détectés par la classification manuelle. ... 100
Figure 7.6 : Pente par rapport aux résultats de la triangulation sans simplifier ... 100
Figure 7.7 : Différence de largeur entre les fonds selon la tolérance. ... 101
Figure 7.8 : Variation 1 des seuils dans l’extraction des squelettes.. ... 102
Figure 7.9 : Variation 2 des seuils dans l’extraction des squelettes. ... 102
Figure 7.10 : Variation des seuils des ramifications des squelettes. ... 103
Figure 7.11 : Évaluation du dénivelé vs la pente avec résultats similaires. ... 104
Figure 7.12 : Évaluation du dénivelé vs la pente avec résultats différents... 104
Figure 7.13. Résultats de l’approche manuelle. ... 107
Figure 7.14 : Résultats obtenus à partir de notre approche. ... 107
Figure 7.15 : Géomorphologie de la Région Pointe-des-Monts. ... 108
Figure 7.16 : Région Pointe-des-Monts. ... 108
Figure 7.17 : Région Godbut. ... 109
Figure 7.18 : Région Manicouagan. ... 109
Figure 7.19 : Région les Escoumins-Manicouagan. ... 110
Figure 7.20 : Région les Escoumins. ... 110
Figure 7.21 : Région Tadoussac. ... 111
xii
Liste des Équations
Équation 2.1: Voisins principaux de la méthode de Straumman 26
Équation 2.2:Voisins diagonaux de la méthode de Straumman 26
Équation 4.1: Équation de la Montagne 49
Équation 6.1 produit scalaire ... 85
Équation 6.2 distance orthogonale du vecteur par rapport à un angle ... 85
Équation 6.3 produit scalaire avec le segment ... 86
xiii
A la memoria de mi padre y al sacrificio de
mi madre. Gracias por no sólo darme la vida,
sino por hacer de mi lo que soy.
xiv
Remerciements
Lorsque j’étais en Colombie, mon objectif académique était de détenir un diplôme de maîtrise en géomatique de l’université Laval. En ces temps-là, je doutais fortement de ma capacité à réaliser ce rêve et d’étudier dans une institution si prestigieuse au Canada. Ainsi, je tiens tout d’abord à remercier le gouvernement du Canada pour m’avoir accepté en tant que résident permanent et avoir ainsi accès au système éducatif québécois. Je souhaite de tout cœur réussir sur le marché du travail pour rendre à la société canadienne ce qu’elle a fait pour moi. En deuxième lieu, j’aimerais remercier l’Université Laval pour m’avoir donné cette précieuse opportunité d’acquérir des nouvelles connaissances tout en me dépassant personnellement. En dernier lieu, un immense merci à toutes les personnes qui m’ont aidé, de près ou de loin, à atteindre mes buts grâce à leurs conseils et leurs encouragements indispensables à la poursuite de mes rêves.
J’ai eu la chance d’être encadré par M. Éric Guilbert, directeur de la recherche, et M. Mir Abolfazl Mostafavi, codirecteur. Merci à vous pour votre disponibilité et votre surveillance aux cours de ces deux dernières années. Vous êtes les architectes de cette recherche et des bons résultats obtenus. Votre capacité à apporter des pistes de solutions claires dans les difficultés m’a encouragé à continuer et permis de garder l’espoir, même dans les moments les plus sombres. Merci pour votre patience lors de la correction de mes travaux, et ce, malgré mes lacunes en français et en anglais, de même que mes faiblesses en programmation et en connaissances techniques. Je suis très reconnaissant pour votre accompagnement et votre écoute.
Merci au professeur Patrick Lajeunesse et à M. Alexandre Normandeau pour permettre de poursuivre cette recherche avec d’autres approches. Votre support et votre assistance ont été très importants pour le développement de nos algorithmes. Merci également au service hydrographique du Canada (SHC) d’avoir fourni les données d’entrée de notre recherche.
Je tiens aussi à faire mention de tous mes collègues qui poursuivent le même objectif, j’espère que vous pouvez bien terminer votre recherche. Merci aux personnes qui m’ont aidé à la rédaction et à l’amélioration de ma connaissance de la langue française. Aux amis rencontrés pendant mon séjour à Québec, merci pour les rires, les bons moments et le relâchement nécessaire pour maintenir une santé mentale. Finalement, à ma famille et mes amis en Colombie, merci pour votre support et votre confiance, cette réussite est aussi pour vous.
xv
« Hay algo que existe en los colombianos: no
perdemos la esperanza de hacerlo cada vez
mejor ». Jaime Garzón.
1
Chapitre 1 - Introduction
1.1 Mise en contexte
Les systèmes d’information géographique (SIG) stockent des données spatiales de la surface de la Terre. Jour après jour, les SIG’s doivent recueillir plus de données pour gérer de meilleure manière l’information du territoire. Ceci résulte de la croissance des besoins des utilisateurs et des avancées technologiques. Au cours des deux dernières décennies, les outils informatiques sont devenus de plus en plus abordables, disponibles et puissants. De cette manière, les processus traditionnels, qui étaient réalisés de manière visuelle ou manuelle, ont été automatisés afin d’optimiser l’analyse des données. Dans cet ordre d’idées, les sciences de la terre ont été associées aux SIG et à l’informatique, Par exemple, la géomorphométrie est née à partir de la combinaison de la géomorphologie, des mathématiques et des sciences informatiques. Ainsi, cette nouvelle science analyse la surface à partir de la géométrie du relief par un ordinateur. La géomorphométrie extrait des éléments primitifs de la surface et des formes de relief, comme des montagnes, des vallées ou des canyons.
Une forme de relief est une région facilement reconnaissable par sa forme et ses éléments saillants. Toutefois, sa définition est vague et dépend du domaine d’étude. Bien que la définition soit claire pour les humains, elle est difficile à implanter dans une machine. Il faut traduire les concepts qualitatifs de la définition en valeurs quantitatives qui peuvent être traitées par un ordinateur. En général, des travaux liés à la cognition spatiale permettent de structurer les définitions des formes autour d’éléments saillants en fournissant des attributs pour formaliser ces définitions. Cependant, il n’existe pas un cadre formel qui permette de faire une modélisation systématique des formes de relief. Par conséquent, notre recherche aidera au développement d’un modèle logique de la représentation d’une forme de terrain, le canyon sous-marin. Notre approche évalue l’utilisation des structures topologiques dans la description des formes de relief par des algorithmes qui assignent des attributs selon la topographie du terrain.
Nous proposons d'identifier des canyons parce que les chercheurs des domaines marins en ont besoin pour analyser le développement du paysage marin. Par exemple, la vie marine est diversifiée grâce aux effets des canyons sur la circulation des courants, le transport de sédiments et les divers habitats où les espèces peuvent vivre (Würtz, 2012). Notamment, ces derniers temps le domaine marin a été intégré dans les SIG’s pour gérer l’information de manière similaire au domaine terrestre.
2
1.1.1 Intérêt de canyons sous-marins
Les canyons sous-marins ont été découverts à la fin du XIXe siècle. En dépit d’être une découverte récente, ces types d’éléments présentent plusieurs caractéristiques qui font d’eux un élément essentiel dans l’environnement et la vie sous-marine.
Un canyon sous-marin est une vallée étroite prolongeant le plus souvent un fleuve (ou une rivière) et entaillant une partie de la plate-forme continentale (figure 1.1). L’entaille des canyons sous-marins s’étend parfois jusqu’au talus ou la pente continentale (Saffache, 2003). Les canyons sous-marins sont encaissés à travers la pente continentale. Leurs sections transversales sont généralement en forme de V le long du cours supérieur et en forme de U le long du cours inférieur (Danovaro et coll., 2010).
Figure 1.1 : Structure d’un canyon [Würtz, 2012].
Les canyons jouent un rôle très important dans le fonctionnement des écosystèmes, mais ils sont aussi très vulnérables par rapport à d’autres éléments marins à cause de leur biodiversité (figure 1.2, sections A et B). Par ailleurs, les canyons sont soumis à certains polluants qui nuisent à leur environnement, comme le CO2;
aux activités humaines irresponsables (figure 1.2, section C), comme la pêche incontrôlée; et aux conséquences du changement climatique, comme l’acidification des océans. Toutefois, ils peuvent occasionner des dommages à la nature et à l’homme, à cause des courants turbides (Salomon, 2008). Par conséquent, l’homme doit protéger ces types d’écosystèmes pour mitiger les conséquences des dégâts naturels, pour contrôler de possibles menaces et pour satisfaire les besoins humains, comme la localisation d’infrastructures, le soutien d’opérations nautiques et le développement de la science.
3
Figure 1.2 : A. Faune, B. Flore, C. Impact Anthropogénique d’un canyon [Ensemble d’images de Company et
coll. (2012); Madurell et coll. (2012)].
1.1.2 La géomorphométrie dans un contexte marin
Dans le domaine de la géomorphologie marine, la bathymétrie constitue la principale source d’information du fond marin. Les données bathymétriques peuvent être interprétées de façon qualitative, par interprétation visuelle des courbes isobathes et du relief ombré, ou de façon quantitative, par analyse géomorphométrique. La géomorphométrie générale se réfère à la mesure et à l’analyse de certaines caractéristiques des formes du terrain qui sont applicables à n’importe quelle surface rugueuse continue (Evans, 1980). La géomorphométrie, qui est la science de l’analyse quantitative de la surface du terrain (Pike, 1995,2000; Rasemman et coll., 2004), est un champ interdisciplinaire relié aux mathématiques, aux sciences de la terre et, plus récemment, à l’informatique. Elle est la science de la quantification topographique, dont les objets et les paramètres sont extraits à partir des modèles numériques de Terrain (MNTs) (Pike et coll., 2009). C’est-à-dire, une analyse géomorphométrique du terrain implique simplement l’identification de la géométrie et des formes de la surface, elle n’est pas reliée à une description des processus de formation ni d’évolution du relief.
1.1.3 Principes de l’identification des formes de terrain
Dans la géomorphologie, l’identification de formes de terrain est réalisée par des méthodes manuelles et automatiques. Cette identification a pour but la réalisation de cartes géomorphologiques pour servir de soutien technique dans les projets de génie et sciences de la terre.
Au cours de la dernière décennie, la cartographie géomorphologique est devenue un outil incontournable dans l’étude des glissements de terrain sous-marins (Lastras et coll., 2002; Haflidason et coll., 2004). Selon Smith
et coll. (2011) les cartes géomorphologiques constituent actuellement la meilleure présentation explicative des
4
1.1.3.1 Mode manuel
Dans l’interprétation qualitative manuelle, les données sont intégrées dans un système d’information géographique (SIG), dont la procédure implique l’identification des formes ou des caractéristiques qui peuvent être indicatrices d’une forme de terrain ou d’un processus géologique. Cette procédure est effectuée à travers plusieurs étapes et dépend de l’expérience de l’interprète. Par conséquent, elle demande du temps et a un degré de subjectivité dans l’interprétation (Micallef, 2011).
L’interprétation de formes de terrain se faisait traditionnellement par des images numériques ou des relevés bathymétriques basée sur des caractéristiques précises de la surface à l’image. Toutes ces caractéristiques sont qualitatives et subjectives, telles que le ton, la texture, la tendance ou la forme des objets. Ainsi, l’interpréteur de l’image regroupait les éléments du relief dans des zones avec des caractéristiques similaires entre leurs objets et associait des caractéristiques géomorphologiques à chacune de ces régions.
De cette façon, les cartes géomorphologiques étaient le résultat d’une classification manuelle. Cependant, ces cartes traditionnelles ont été peu à peu remplacées par des cartes géomorphologiques qui sont extraites de modèles numériques de terrain (MNT) (Seijmonsbergen et coll., 2011). Finalement, des outils d’automatisation ont été ajoutés aux procédures de classification pour faciliter la manière de classer les éléments d’une image. Les procédures ont tendance à devenir de plus en plus automatiques à mesure que la technologie progresse.
1.1.3.2 Mode automatique
Habituellement, l’identification des éléments de relief est réalisée par des traitements de MNT basés sur le pixel, et les résultats dépendent de la taille des cellules, de l’échelle fixée et des paramètres de seuil de classification. Une forme du relief est un élément physique de la surface terrestre présentant une forme, une taille et une échelle bien reconnaissable.
Le format le plus populaire dans l’identification de formes du relief est le raster. Cette structure est avantageuse pour les mesures géomorphologiques parce que la plupart de ses propriétés techniques sont contrôlées de manière automatique par une seule mesure : la résolution spatiale ou la taille de la cellule (Hengl, 2006). De manière générale, l’extraction automatisée des éléments du relief à partir du MNT présente des approches basées sur l’analyse différentielle en chaque cellule. Ainsi, la reconnaissance des formes peut être faite par l’identification des éléments critiques de la surface par rapport à un filtre qui fait l’analyse de tous les pixels voisins (figure 1.3).
5
Cependant, les rasters possèdent de nombreux désavantages comme leur structure qui est une matrice rectangulaire indépendamment de la morphologie de la zone, les hauts besoins de stockage des données, le sous et le suréchantillonnage de la zone d’étude (Pike et coll., 2009).
Figure 1.3 Traitement d’un MNT basé sur les pixels [Image modifiée Gercek, 2010].
1.2 Problématique générale
Les méthodes actuelles utilisées pour l’identification de formes du relief présentent certaines limitations selon la subjectivité de l’utilisateur ou la définition conceptuelle des canyons sous-marins. En effet, l’identification par le mode manuel dépend de l’expertise de l’interpréteur, tandis que le mode automatique relie des valeurs quantitatives à des attributs qualitatifs1 qui définissent une forme géographique, dans notre cas, un canyon.
Par exemple, un canyon sous-marin peut se définir comme un « creux de forme allongée, étroit, et à flancs escarpés, qui présente généralement une pente descendante » (IHO, 2013)2. Cette définition correspond à
une description qualitative dépendante du contexte. Cependant, ce concept peut varier selon le domaine parce que les critères pour déterminer un canyon sont différents, c'est le cas de la géomorphologie et la navigation, qui utilisent d’autres notions pour décrire la structure d’un canyon. De ce point de vue, il y a une sémantique subjective et variable selon le contexte. De plus, il y a un enjeu cognitif philosophique à savoir ce qu’est un canyon et comment en identifier les limites.
Jusqu'ici, nous avons touché les problèmes reliés aux méthodes actuelles d’identification et la sémantique qui définit un canyon. Donc, pour avoir un contexte plus global, nous regroupons les problèmes détectés dans un seul énoncé qui sera notre problématique générale :
1 Quand nous parlons dans ce document d’une variable quantitative, nous faisons toujours référence à une valeur numérique fixée,
tandis qu’une caractéristique qualitative, nous voulons toujours exprimer la manière par laquelle un canyon est décrit selon sa définition. Par exemple : caractéristique qualitative : « long », variable quantitative : « >100 Km ».
6
PG : Il y a une difficulté à décrire qualitativement les formes du relief et une dépendance à un cadre de référence (contexte géographique, perception de l’utilisateur, échelle, paramètres et seuils) fixé par l’utilisateur dans les méthodes d’identification actuelles.
Maintenant, nous pouvons mieux analyser les problèmes concernant la méthodologie actuelle.
1.2.1 Problèmes reliés au mode manuel
La classification de manière totalement manuelle demande un temps considérable et la surveillance d’une personne dotée d’une longue expérience dans l’identification des formes de terrain. Par conséquent, le coût d’un projet augmentera si la classification se réalise de manière totalement manuelle. Il faut avoir un calendrier d’exécution étendu et une main d’œuvre expérimentée par rapport aux méthodes automatiques.
1.2.2 Problèmes reliés au mode automatique
Dans l’identification des formes sur un MNT, l’utilisateur donne sa perception au moment d’assigner des valeurs quantitatives aux caractéristiques relatives des structures, telles que la hauteur, l’inclinaison ou même l’étroitesse des structures. De cette façon, l’étroitesse va être définie comme une valeur fixée indépendante du contexte spatial de l’objet. La méthode ad hoc dépend de la perception de l’utilisateur et implique un degré significatif de subjectivité pour les objets concernés.
Le traitement raster d’un MNT peut servir pour l’analyse de courbure et des éléments de petite taille. Mais, pour les éléments plus complexes, plus généraux ou de taille supérieure, tels que les canyons sous-marins, il présente des limitations par rapport à l’information spatiale et spectrale des objets. En format raster, l’utilisateur doit fixer certains paramètres pour déterminer les classes morphométriques d’un élément, tels que des mesures, des échelles ou même la résolution des cellules. Dans la figure 1.4, l’utilisateur fixe certaines échelles pour visualiser la crête d’une montagne, mais pour chaque échelle l’élément est représenté par une classe morphométrique différente.
La plupart des méthodes développées de manière automatique pour classer le fond marin présentent des aspects subjectifs dans certaines étapes de leur application. La méthodologie idéale dans la classification automatique devrait offrir des moyens statistiques robustes pour être plus objective (Ismail et coll., 2015). Ainsi, un cadre idéal serait où l’utilisateur ne fixera aucune mesure pour la description qualitative des formes de terrain.
7
Figure 1.4 : Variation de l’échelle et comportement des classes morphologiques de la crête d’une montagne [Fisher et coll., 2004].
1.3 Question de recherche
Nous avons déjà constaté une difficulté à décrire qualitativement les formes de terrain à cause de la dépendance des paramètres fixés par l’utilisateur. Ces paramètres sont quantitatifs et subjectifs, ce qui rend difficile l’identification qualitative des formes du relief. D’ailleurs, les canyons possèdent des caractéristiques complexes définies par leur structure puisqu’ils présentent des zones hétérogènes et une variabilité du terrain. C’est la raison pour laquelle ils présentent une biodiversité riche (Ismail et coll., 2015). Ces caractéristiques complexes font que l’identification de canyons implique l’utilisation de techniques cartographiques en dehors des méthodes traditionnelles.
Parallèlement, il y a une difficulté à trouver une définition précise de ce qu’est un canyon et d’avoir une sémantique claire et générale. Il y a aussi une dépendance de descriptions non numériques ce qui rend difficile la localisation précise des éléments à une machine. De cette manière, il y a une incertitude du sens d’un canyon et de ses propriétés générales. Ces types d’enjeux nous mènent à nous poser des questions telles que : qu’est-ce qu’un canyon ? Quelles sont ses limites ? Où il commence ou où il va finir ? Comment peut-il se différencier d’une vallée ? Est-ce qu’il y aura des paramètres à fixer dans une classification qualitative ?
Enfin, il y a plusieurs questions à aborder, mais nous précisons la question suivante comme celle qui va être notre interrogation à traiter pendant la recherche. Ainsi, nous chercherons à donner une contribution pour résoudre notre problématique générale.
QR : Comment identifier de manière automatique des formes complexes comme les canyons à partir de leur définition conceptuelle?
8
L’idée pour traiter cette problématique est de procéder ainsi : d’abord, l’identification des éléments saillants de la surface pour identifier les canyons potentiels ; ensuite, la construction des objets qui se trouvent autour de la structure saillante en fonction de la définition des canyons sous-marins. Ainsi, leur description va dépendre de leur contexte géographique, des relations avec leurs voisins et des attributs qualitatifs, et pas de paramètres quantitatifs.
1.4 Hypothèse générale
En analysant les méthodes d’identification automatique des formes de terrain, nous trouvons certaines difficultés à travailler avec les méthodes habituelles d’identification en format raster. Pour l’instant, Ces méthodes travaillent par la segmentation du terrain en zones homogènes, étant inadaptées pour la reconnaissance des éléments saillants qui déterminent le canyon. D’ailleurs, l’analyse d’image fixe des seuils absolus donnés par l’utilisateur. Donc, nous pouvons voir que le raisonnement sur un MNT n’est pas suffisant. Il faut avoir une structure de support, une topologie. La topologie est déterminée par les structures saillantes du terrain puisqu’elles forment le squelette sur lequel les formes sont bâties (figure 1.5). Cette méthode nous assurera un degré de robustesse plus élevé que l’analyse d’image.
Figure 1.5 Structures saillantes d’un élément géographique [Image modifiée de Rana, 2010].
L’utilisation d’une structure topologique permettrait de pallier les limitations du pixel. Les résultats auront l’information spatiale de l’entourage des formes de terrain sans besoin d’une application multi-échelle sur les données. De cette manière, nous espérons que les résultats par réseaux de surface seront similaires à ceux obtenus par des experts dans une étude préalable.
D’ailleurs, nous penchons sur le développement d’une structure topologique de type réseau de surface parce qu’elle possède certains avantages par rapport au format matriciel. Rana, (2004), a décrit des avantages de travailler avec une structure topologique pour les surfaces : (i) la structure topologique de données réduira les
9
nombres de points requis pour construire une surface ; (ii) les relations topologiques permettent un accès plus efficace aux bases de données spatiales; (iii) Les structures topologiques peuvent donner une représentation unifiée de la structure de la surface; (iv) Les structures topologiques sont utiles pour la visualisation de la structure des surfaces.
En effet, nous travaillerons sur un réseau de surface, une structure topologique qui caractérise les éléments saillants de la surface pour extraire les squelettes ou les éléments structurants des canyons. De cette manière, l’hypothèse à prouver dans notre travail sera la suivante :
HG : L’utilisation d’une structure de squelette peut aider à extraire des formes complexes de terrain de manière automatique à partir d’une description qualitative.
Le squelette d’un objet est formé par des structures saillantes qui sont la partie la plus perceptible pour un observateur. Il faut chercher des caractéristiques sur le terrain qui permettent d’identifier la structure saillante correspondant à la ligne de talweg sur laquelle nous nous appuierons pour bâtir les canyons sous-marins (Figure 1.6). De cette manière, le squelette peut être considéré comme un type de graphe dont l’ensemble des sommets représente les points critiques, et dont les arêtes représentent les lignes critiques de l’objet. Par rapport aux lignes critiques, les talwegs forment les conduits des canyons et les lignes de crêtes bordent la structure des canyons sous-marins. Donc, la définition d’un canyon sera donnée par une ligne de talweg (le squelette) avec une surface autour délimitée par un polygone.
Figure 1.6 : Structure saillante d’un canyon sous-marin [Université de Maryland].
D’ailleurs, l’information à extraire ne sera pas dépendante de l’échelle. Ainsi, elle sera plus adaptative que les méthodes de traitement d’image, permettra d’identifier des éléments plus complexes que de simples courbes de terrain et donnera une approche différente à l’identification des formes de relief, en évitant l’utilisation de paramètres fixés par une personne.
10
Finalement, les résultats obtenus par nos algorithmes permettront d’infirmer ou affirmer notre hypothèse. Dans le cas où l’hypothèse est affirmée, les algorithmes de réseaux de surface décrivent qualitativement les canyons sous-marins, c’est-à-dire, avec un nombre limité d’attributs fixés par rapport aux méthodes d’analyse d’image. Dans le cas où l’hypothèse est infirmée, les algorithmes présentent de la difficulté à identifier le squelette et à définir les attributs de forme. Ils manquent de robustesse et possèdent des paramètres subjectifs dans la définition des formes de la surface. La robustesse et la pertinence des résultats seront à revoir auprès des experts.
1.5 Objectif général
OG : Identifier des formes complexes automatiquement à partir d’une description qualitative du terrain.
L’objectif général de la recherche vise à identifier des canyons sous-marins, en considérant une approche à partir de la description qualitative de notre objet d’étude. Nous parlons de cette approche parce que la sémantique des éléments géographiques n’est pas liée à des valeurs quantitatives, même si l’analyse d’image utilise des valeurs numériques pour identifier les formes de terrain. Également, dans l’analyse d’image, l’identification des formes complexes n’est pas relativement simple à faire. De cette manière, notre projet va contribuer à proposer une méthode dans un contexte précis et à traiter juste une forme particulière, les canyons sous-marins.
Finalement, les algorithmes réalisés donneront une identification morphométrique des canyons sous-marins en étant un support pour les classifications réalisées par des géomorphologues. Également, ils seront des outils pour étudier la surface du terrain et pour le développement des solutions appliquées à la science, comme dans les études de la mer en particulier lors de la recherche de ressources, la protection de l’environnement marin et les glissements de terrain sous-marins.
1.6 Objectifs spécifiques
OS1 : Construire une structure robuste du terrain par le réseau de surface qui donne une topologie au domaine des données (squelette de tout le terrain).
Le squelette sera obtenu en fonction des points critiques, des lignes de crêtes et des talwegs. Ainsi, notre structure sera un réseau de surface avec des relations topologiques entre tous les points du modèle de terrain. La topologie peut nous offrir une structure plus robuste pour le calcul d’attributs que la procédure de l’analyse d’image.
11
OS2 : Extraire le squelette des canyons à partir du réseau de surface.
Étant donné que le réseau de surface contient l’information de tout le terrain, il faut simplifier le réseau en obtenant les structures saillantes qui nous permettent de construire les canyons. La procédure de simplification du réseau doit assurer que la forme des éléments soit conservée. Afin d’obtenir les lignes de talweg qui représentent les structures saillantes des canyons, il faut calculer les attributs de forme de nos objets. Par la suite, l’agrégation de segments doit se réaliser pour obtenir une ligne de talweg unifiée.
OS3 : Obtenir les polygones du fond du canyon autour du squelette à partir de sa description qualitative.
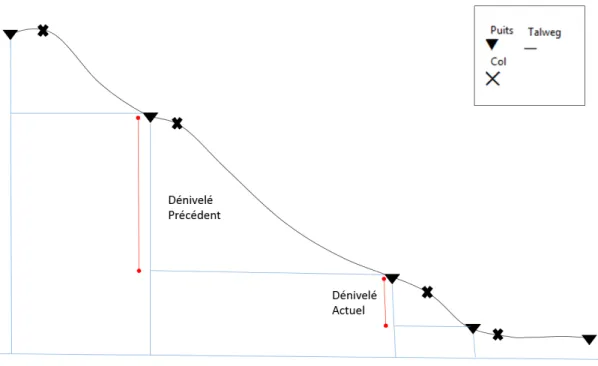
Le développement d’un modèle conceptuel permet d’extraire le fond du canyon par l’obtention des polygones autour du talweg. Ces polygones seront définis par des attributs de la morphométrie du terrain, tels que le dénivelé entre deux points ou l’inclinaison de la pente. De ce fait, les concepts qualitatifs de la définition de canyon sont reliés aux attributs morphométriques par des paramètres relatifs à la surface.
OS4 : Validation des résultats avec la classification manuelle.
Pour valider les résultats obtenus, les contours des canyons seront vérifiés auprès des experts en géomorphologie marine par des rencontres périodiques pendant la recherche. D’ailleurs, il y a une étude préalable d’identification manuelle de canyons sous-marins de la même zone d’étude, qui a été faite par des géomorphologues du département de géographie de l’université Laval.
1.7 Structure du mémoire
Le reste de ce mémoire est organisé de la manière suivante :
Le chapitre 2 présente le contexte de cette recherche en introduisant le concept de forme de relief. D’abord, les notions de géomorphométrie sont exposées pour identifier les paramètres d’identification dans le processus d’extraction de formes. Ensuite, certaines méthodes existantes sont analysées selon les approches basées sur les pixels et les objets. D’ailleurs, des études spécifiques par rapport aux canyons sous-marins sont présentées en réalisant la détection des éléments de manière visuelle et automatique. Finalement, une recherche de canyons dans notre zone d’étude est le support pour valider les résultats obtenus par notre méthode.
Le chapitre 3 montre le cadre méthodologique à développer dans notre projet, le cadre opératoire et la zone de travail. D’ailleurs, les étapes de notre méthode comprennent la construction du réseau de surface, le réseau de la simplification en considérant les caractéristiques qui définissent les talwegs des canyons. Finalement, le polygone autour des talwegs délimitant le fond du canyon est construit.
12
Le chapitre 4 présente la construction du réseau de surface. En premier lieu, l’aspect conceptuel du réseau de surface et ses composants. Ensuite, viennent les algorithmes que nous avons réalisés pour le développement de la méthode et certains résultats obtenus.
Le chapitre 5 expose la simplification du réseau par des caractéristiques des talwegs des canyons. D’abord, le modèle conceptuel de la simplification est analysé en ayant des contraintes qui garantissent la consistance topologique du réseau. À partir de certaines caractéristiques géométriques, les talwegs des canyons sont détectés.
Le chapitre 6 montre l’extraction du fond des vallées. La construction du polygone du fond du canyon se fait par une région croissante autour du talweg. Finalement, la largeur du fond aide à distinguer les canyons des autres types de vallées, tels que les chenaux.
Le chapitre 7 réalise l’analyse des résultats obtenus. La robustesse de nos algorithmes est évaluée par le changement de paramètres dans chaque étape développée. De cette manière, les processus sont testés avec des valeurs différentes pour identifier s’ils sont dépendants des seuils fixés.
Le chapitre 8 présente les conclusions de l’approche suivie dans le mémoire. D’ailleurs, certaines discussions sont exposées par rapport aux lacunes identifiées, contributions et directions pour des recherches futures liées à l’extraction de formes du relief.
13
« La vida no es la que uno vivió sino la que
uno recuerda y cómo la recuerda para
contarla ». Gabriel García Márquez.
14
Chapitre 2 – L’état de l’art
2.1 Introduction
Une forme du relief est un élément physique de la surface terrestre qui est reconnaissable (MacMillan et Shary, 2009). Cependant, sa définition physique est vague, même si elle est définie par la perception humaine (Smith et Varzi, 2000). Ces formes peuvent résulter de l’interaction des processus physiques et des mouvements géologiques de la croûte terrestre (Whittow, 2000).
Traditionnellement, la réalisation de cartes de formes du relief a été faite par l’interprétation d’images, soit de photographies aériennes, soit des images numériques. Cette méthode manuelle est laborieuse, lente et dépend de l’expertise de l’interpréteur humain. Au fur et à mesure que les modèles numériques de terrain (MNT) sont plus accessibles, des méthodes automatisées ont été développés afin de réduire les coûts et le temps de création d’une carte. Ainsi, la technologie numérique a permis de réaliser des processus plus efficaces et d’explorer d’autres domaines, tels que le monde sous-marin. Par conséquent, les scientifiques ont besoin d’améliorer les procédures automatisées pour recueillir plus d’information de la surface terrestre et essayer de remplacer les procédures manuelles.
Dans ce chapitre, on se concentrera sur notre objet d’étude et sur les méthodes d’extraction des formes du relief. D’abord, la définition d’un canyon sous-marin et les attributs des mesures des formes pour sa détection (géomorphométrie) seront présentés. Ensuite, nous verrons les différentes approches automatiques d’extraction des formes du relief. Généralement, ces méthodes sont basées sur les pixels et les similitudes des attributs continus du terrain, tels que la courbure et le gradient.
2.2 Le cadre conceptuel d’un canyon sous-marin
Un canyon sous-marin est une forme du relief avec une définition vague parce qu’elle n’est pas précise considérant le degré d’interprétation des termes qualitatifs. Il n’y a pas de définition universelle et absolue d’un canyon, mais en général, on peut dire que: « Un canyon sous-marin est un type de vallée ayant des parois abruptes avec des sections transversales en forme de V, des flancs inclinés vers l’extérieur et un relief comparable au plus grand des canyons terrestres » (Shepard, 1963). D’ailleurs, de nombreux canyons sont associés à l’embouchure des grands fleuves. En général, les canyons sous-marins sont creusés dans le talus continental, même s’il y a certains canyons qui peuvent entailler le plateau continental ou même atteindre la plaine abyssale (King et Cuchlaine, 1975). Voici les détails de ces éléments constituant l’environnement marin (figure 2.1 A et B):
15
Plateau Continental : Il correspond à la partie des continents récemment couverte par la mer en ayant une pente peu prononcée. Sa limite supérieure est fluctuante en raison des mouvements de la mer. Sa limite inférieure est le bas de la pente continentale ou talus. Le plateau continental est peu profonde et ne représente qu’une partie étroite de l’océan s’étendant du rivage jusqu’au talus (Salomon, 2008).
Pente ou talus continentale : C’est un escarpement raide qui relie le plateau au fond. Il est situé entre 200 et 3000 mètres de profondeur et représente environ 15% des océans. Les pentes continentales ne vont pas toujours jusqu’à la plaine abyssale. À leurs pieds s’accumulent des cônes formant des glacis sédimentaires (Salomon, 2008).
Glacis : Il s’agit d’un cône géant situé au pied du talus continental. Des grandes quantités de sédiments sont transportées à travers le plateau et la pente continentale et déposées au fond de l’océan par des courants de turbidité ou par des glissements de terrain (Salomon, 2008).
Plaine abyssale : Il s’agit des grands fonds marins situés entre 5000 et 6000 mètres. La plaine abyssale est recouverte de sédiments, soit d’origine continentale, qui peuvent être transportés par les canyons sous-marins, soit d’origine océanique. Elle s'étend sur environ 307 millions de km² au-delà du plateau continental (Louchet, 2014).
L'identification des formes du relief varie en fonction du type de marge de la structure marine, soit une marge active ou passive. Les marges actives possèdent des canyons plus raides, courts et moins dispersés que ceux qui se trouvent sur les marges passives. De plus, dans les marges passives, le dépôt de sédiments est supérieur à celui des marges actives. (Harris et Whiteway, 2011). Ces différences entre les structures du relief sous-marin peuvent expliquer la géométrie différente des canyons sur les deux côtes d'Amérique du Nord.
16
Figure 2.2 B: Structure du relief marin: Marge Active [Harris et Whiteway, 2011].
Dans notre recherche, ces définitions, qui se rapportent à l’océan, seront adaptées aux conditions de l’estuaire du Saint-Laurent.
2.2.1 Discussion sur la définition des canyons sous-marins
La définition de canyon se base sur des concepts sémantiques qui sont d’habitude flous et difficiles à traduire dans un modèle logique implanté dans un ordinateur. Cependant, cette définition est bien compréhensible pour les humains. Ce problème est lié à l’écart entre l’aspect qualitatif, qui est lié à la perception visuelle des personnes, et quantitatif, qui précise des instructions pour une machine. En général, les formes du relief ne sont pas perçues de la même manière. Cela provoque une difficulté dans la généralisation des définitions parce que leurs termes dépendent de la perception du lecteur (Mark et Smith, 2004).
Dans le domaine marin, Harris et coll. (2004) a réalisé une classification de la géomorphologie de l’océan à partir d’un modèle de grille du fond de l’océan. Pour chaque élément marin, les définitions des éléments étaient de divers types selon la zone d’intérêt. À titre d’exemple, les canyons sous-marins ne sont pas définis de la même manière sur les deux côtes de l’Amérique du Nord : pour la côte ouest, un canyon peut s’étendre sur une profondeur d’au moins 1000 m et être incisé au moins 100 m dans la pente continentale à un certain point le long de son talweg (Harris et coll., 2004). Par contre, sur la côte est dans l’estuaire du Saint-Laurent, les canyons sont beaucoup plus courts avec une profondeur en dessous de 300 m (Normandeau et coll., 2015).
17
2.2.2 Exemple d’identification de canyons dans l’estuaire du Saint-Laurent
Le travail analysé dans cette section couvre notre zone d’étude et constitue la base pour valider les résultats obtenus par notre méthode. L’estuaire du Saint-Laurent est l’un des plus grands estuaires du monde, atteignant 200 km de longueur, 50 km de largeur et une profondeur maximale de 350m. Il est localisé entre les provinces géologiques de Grenville (nord) et des Appalaches (sud) dans l’Est du Canada.
Normandeau et coll.( 2015) ont détecté des chenaux et des canyons sous-marins par des caractéristiques physiques et géomorphologiques, telles que la présence de litages reliée aux écoulements par gravité, l’intensité de rétrodiffusion, l’incision axiale et la présence de couches déposées sur les sédiments superficiels (figure 2.2). Les canyons du Saint-Laurent sont situés dans un environnement d'eaux peu profondes Les valeurs associées aux canyons diffèrent légèrement de celles qui sont utilisées dans un contexte d’eaux plus profondes. Par exemple, Talling ( 2014) utilise le terme de canyon pour des incisions profondes (supérieures à 100 m) formées principalement par érosion et le terme de ravine pour de petites incisions (inférieures à 100 m). Dans l’estuaire du Saint-Laurent, toutes les incisions sont inférieures à 100m, par conséquent, toutes les vallées seraient considérées comme des ravines. Ainsi, des valeurs différentes sont associées aux définitions des vallées par rapport aux caractéristiques bathymétriques présentes dans le Saint-Laurent : le mot « canyon » sera utilisé pour des incisions (supérieures à 10 m) formées principalement par l'érosion qui atteignent le niveau de la base, qui est le fond du chenal Laurentien. Le terme « ravines » designera des incisions à petite échelle (inférieures à 10 m), qui généralement n’atteignent pas le niveau de la base. Les chenaux sont définis comme des conduits qui sont formés principalement par des écoulements sédimentaires en atteignant le plateau continental ou le niveau de la base (Talling, 2014). Généralement, ils ont un profil en forme de U et leur fond est large et relativement plat.
18
2.3 Notions de géomorphométrie
La géomorphométrie est la science de la quantification topographique afin d’extraire des paramètres de la surface terrestre et des objets à partir d’un modèle numérique de terrain (MNT). L’entrée habituelle de l’analyse géomorphométrique est une représentation en mode grille (raster). Cette structure est particulièrement avantageuse car la plupart de ses propriétés techniques dépendent d’une seule mesure, soit la résolution spatiale ou la taille de la grille. La plupart des algorithmes basés sur le mode grille utilisent l’opération de voisinage : une procédure qui déplace une matrice régulière (habituellement de 3x3) sur toute l’image. Ainsi, une formule mathématique est répétée pour chaque emplacement de la fenêtre (Pike et coll., 2009).
En général, un élément de surface terrestre a une forme, une taille et une échelle bien reconnaissables. Il se distingue par la fréquence statistique de ses attributs géomorphométriques et aussi par ses dimensions spatiales, telles que la longueur, la largeur et la hauteur. Les attributs principaux de la géomophométrie sont : la longueur, la pente, la fréquence des pentes et des inversions de pente, l'ampleur de son relief interne, le degré d'incision et l'ordre hydrologique des canaux de drainage et des considérations distinctives de forme ou d’orientation (par exemple, long et étroit contre court et rond). (MacMillan et Shary,2009).
En général, les attributs dans la géomorphométrie correspondent à des mesures de type focal, zonal et global. En premier lieu, les attributs focaux couvrent le premier ordre de dérivées d’élévation, tels que la pente en termes de magnitude (gradient) et direction (aspect). Un deuxième ordre de dérivées d’élévation considère le profil et les mesures de courbure. Ces mesures sont calculées par le mouvement d’une fenêtre d’opération focale, habituellement d’une fenêtre de dimensions de 3X3 cellules. Ensuite, les attributs zonaux sont calculés à partir de l’analyse d’une région définie. Finalement, les attributs globaux, qui peuvent considérer toutes les cellules de la zone d’étude, par exemple la distance ou l’élévation vers une dépression locale, sont plus complexes à calculer. (Straumann et Purves, 2008).
On va présenter certains paramètres de base du relief pour l’analyse de manière focale et zonale (Tableau 2.1). D’une part, les paramètres focaux sont : la pente, qui reflète le changement maximal d’élévation en indiquant l’angle entre le plan horizontal et le plan tangentiel à la surface; l’aspect, qui indique la direction de l’écoulement; la courbure tangentielle et de profil, qui distinguent des formes convexes et concaves afin de connaître la convergence, la divergence et l’accélération de l’écoulement. D’autre part, les paramètres zonaux sont : un bassin versant, qui est la région où l’eau coule à un point défini; une courbe hypsométrique, qui donne de l’information sur la configuration interne du bassin versant; l’isolation, qui est l’intensité de radiation solaire qu’un ensemble de pixels reçoit par rapport à sa pente; l’exposition visuelle, qui détermine si la cellule est visible depuis d’autres points; et la rugosité, qui indique si le terrain est ondulé (Olaya, 2009).
19
Paramètre Type Que faut-il décrire?
Pente Focal Écoulement
Aspect Focal Direction de la ligne d'écoulement
Courbure Tangentielle Focal Premier mécanisme d'accumulation
Courbure du profil Focal Deuxième mécanisme d'accumulation
Bassin Versant Zonal Magnitude d'écoulement
Hypsométrie Zonal Distribution de valeurs de hauteur Élévation/ Pente du
bassin Zonal Caractéristiques d'écoulement Insolation Focal/Zonal Intensité d'irradiation solaire
Exposition visuelle Zonal Étendue de la zone visible
Rugosité Focal Complexité du terrain
Tableau 2.1 : Certains paramètres de base du relief dans la géomorphométrie. [Olaya, 2009].
L’extraction automatisée des éléments du relief à partir du MNT présente certaines approches concentrées sur l’analyse de la forme locale reliée aux courbures de la surface. La reconnaissance des éléments de base de la surface sur une grille de cellules (figure 2.3) peut être différenciée par les puits (tous les pixels voisins sont plus élevés), les pics (tous les pixels voisins sont plus bas), les canaux ou talwegs (les voisins sur deux côtés opposés sont plus élevés), les crêtes (les voisins sur deux côtés opposés sont plus bas), les cols (les voisins sur deux côtés opposés sont plus élevés et sur les deux autres côtés sont plus bas) et les plaines (il n’y a pas de courbures proéminentes définissant des formes) (Peucker et Douglas, 1975; Collins, 1975).
20
Figure 2.4 : Classification des formes primitives de terrain [Peucker et Douglas, 1975].
L’identification de ces éléments de base du terrain, permet établir la taille, l’échelle et la position des éléments du relief en aidant à leur classification. Ils sont définis comme une combinaison de mesures de la surface locale, convexe ou concave. (MacMillan et Shary,2009). Ainsi, les éléments de base peuvent être définis par une courbure en : inclinées et non-inclinées. Les éléments inclinés ont une courbure sur le plan et le profil. La figure 2.4 illustre les éléments définis par rapport à l’état de la courbure (concave, droit ou convexe).
Figure 2.5 : Gauche : Éléments inclinés; Droite : Éléments non-inclinés. (X=convexe, V= concave, S= droit). [Dikau,1989].
2.3.1 Extraction des éléments de base du relief
Fowler et Little (1979) proposent l’extraction d’un réseau à partir du MNT, sans spécification préalable d’une surface continue. Les éléments de base du relief sont détectés avec la méthode des huit voisins (Peucker et Douglas, 1975). Cette méthode fait la classification d’un point du raster dépendant des élévations relatives des
21
huit voisins directs. Cependant, cette approche a des faiblesses reliées à l’absence d’une surface continue (Schneider et Wood, 2004) :
• L’emplacement des points des éléments de base est limité aux points donnés par le MNT.
• Les surfaces horizontales ne sont pas prises en compte, donc la détection des éléments peut être incomplète.
• La méthode détecte une grande quantité de cols, en particulier le long des crêtes et talwegs. Par conséquent, il n’y a pas d’intégrité topologique parce que les données sont discrètes (Takahashi, 1995).
Cette approche s’applique à une matrice régulière par le passage d’une fenêtre 3x3 (figure 2.5). De cette manière, chaque fois, une petite matrice 3x3 centrée sur un pixel est utilisée pour classer le type de point en pic, puits, col, crête ou talweg. Ainsi, le point p (i,j) est classé dans la figure 2.5 comme : pic, si les huit autres voisins sont moins élevés ; puits, si les huit autres voisins sont plus élevés; col, si les voisins au-dessus et en dessous alternent autour du point pour au moins deux cycles complets. Ensuite, la surface est analysée par une fenêtre de 2X2 pour détecter les crêtes et talwegs. Le point central (p (i,j), dans la figure 2.5) appartient potentiellement à une crête s’il n’est jamais le plus bas des quatre positions différentes. Ainsi, le point appartient potentiellement à un talweg s’il n’est jamais le plus haut des quatre positions. La fenêtre de 3x3 est divisée en quatre fenêtres de 2X2 dont le point commun est le point central. De cette manière, l’analyse des fenêtres 2x2 permet d’identifier si le point central est un candidat pour être un pixel faisant partie d’une ligne de crête ou de talweg.
22
2.3.2 L’importance de l’échelle
La plupart des techniques pour l’extraction des formes du relief sont limitées à la résolution du MNT. Ainsi, l’information extraite est pertinente seulement à l’échelle sous-entendue par la résolution du MNT. Habituellement, la définition de l’échelle est arbitraire, sans relation à la caractérisation des objets. En fait, la plupart des problèmes de la caractérisation morphométrique résultent d'une variation à une échelle plus fine que le MNT (le bruit) ou des variations sur une échelle plus grossière (les régions plates) (Wood, 1996). Une méthode idéale ne devrait pas considérer une échelle fixe dépendant de la résolution du MNT. La méthode devrait avoir une approche multi-échelles où les objets sont évalués à différentes échelles ou à une échelle fixée par rapport à la taille des objets. Elle devrait dépendre de la nature de l’application et des caractéristiques inhérentes à l’étude (Wood, 2009). Finalement, les résultats devraient être robustes et similaires, peu importe l’échelle fixée.
2.4 Méthodes d’extraction des éléments du relief
Dans les méthodes automatisées basées sur des images, l’identification des formes se réalise par deux approches. La première est une analyse du spécifique vers le général où les attributs sont définis sur une zone par une inspection des valeurs et associés aux formes avec des caractéristiques similaires. La deuxième, qui est une analyse du général vers le spécifique, a un point de départ qui caractérise une forme d’intérêt avant d’appliquer des méthodes pour délimiter ses frontières.
2.4.1 Approche basée sur le pixel du spécifique vers le général
Les approches basées sur le pixel peuvent être divisées par classification non-supervisée et supervisée.
2.4.1.1 Classification non-supervisée
Cette approche se fait par une procédure de regroupement de pixels, soit par un partitionnement flou ou net en minimisant l’écart-type en-dedans de la classe et en maximisant l’écart type en dehors de la classe. Dans le regroupement flou, où chaque point peut appartenir à plus d’une partition, on peut trouver certaines méthodes qui utilisent des statistiques comme critères de mesures, tels que la moyenne et l’écart-type. Le processus de K-moyennes floues divise en K partitions (clusters) pour généraliser la fonction du terrain.
D’abord, on doit considérer le centre C et calculer la distance depuis les divers points (objets) jusqu’à C. Les objets sont répartis parmi les classes selon la similitude entre eux et les clusters. Cette similitude est analysée par la distance en obtenant un échantillon d’écart type. Ainsi, la partition procède par itération jusqu’à ce qu'une solution stable soit obtenue où les objets similaires sont regroupés ensemble dans un cluster. Le ratio entre les valeurs dominantes et sous-dominantes de chaque objet est le degré de chevauchement de la classe
23
ou index de confusion. Cet index peut indiquer des zones du terrain où le changement spatial dans les classes est clair et abrupt, ou diffus et vague (Burrough et coll., 2001).
Si les classes de relief sont partitionnées par une approche nette, les attributs du paysage, qui varient progressivement sur l’espace, sont représentés par des transitions nettes. Ces transitions peuvent résulter en une perte d’information utile et une augmentation de l’erreur à cause de la mise arbitraire des bordures des formes du relief (Heuvelink and Burrough, 1993). Par conséquent, les méthodes de classification floue remplacent les approches nettes, parce qu’elles permettent un chevauchement des classes étant très commun par rapport aux groupes naturels du relief (Gercek, 2010).
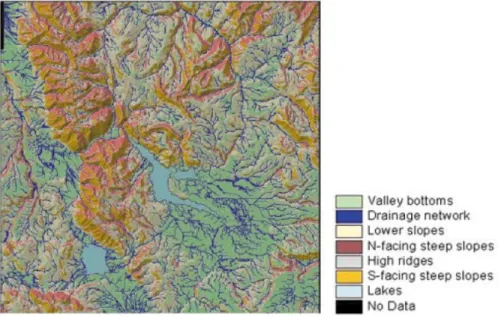
Burrough et coll.(2001) ont utilisé le processus de K-moyennes floues pour faire une classification topo-climatique en identifiant la morphologie dans une zone de Yellowstone(États Unis). La carte qui en a résulté (figure 2.6) montre la répartition de classes obtenues dans la zone par rapport à l’index de confusion et les analyses statistiques.
Ce type de classification, qui est basé seulement sur le regroupement des zones analysées statistiquement, donne un nombre adéquat de classes de forme naturelle. Cependant, les algorithmes basés sur les clusters sont sensibles aux données d’entrée et au cadre de référence donné. Par exemple, les algorithmes peuvent présenter des classes différentes quand ils sont implémentés à une autre zone, ce qui rend difficile la généralisation de la classification (Gercek, 2010).
![Tableau 2.1 : Certains paramètres de base du relief dans la géomorphométrie. [Olaya, 2009]](https://thumb-eu.123doks.com/thumbv2/123doknet/6435628.170710/34.918.242.687.100.649/tableau-paramètres-base-relief-géomorphométrie-olaya.webp)