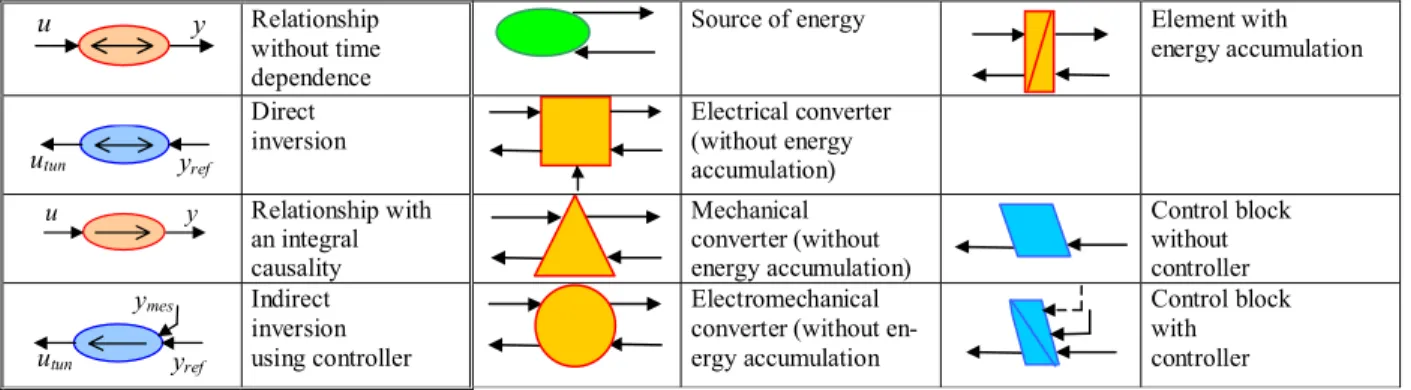
Inversion-based control of electromechanical systems using causal graphical descriptions
Texte intégral
Figure
Documents relatifs
network. We assume the use of ideal rateless codes, so that a node can accumulate transmission rates from the transmission of previous nodes on the routing path. Mutual
Abstract — In this paper a control strategy based on Energy Shaping is designed for the nonlinear boost DC-AC converter with no-resistive load.. This approach does not need to use
Motivated by the approach in [32] and the further developments about change of coordinates [48],[63], in the present work we propose a constructive design of robust ICs to regulation
Raymond LEGEALS, Les réponses du droit anglais et du droit allemand aux problèmes de la responsabilité pénal des personnes morales, Revue des société N 02,1993.. Yves MAYAUD,
Model Predictive Control of Residential Energy Systems Using Energy Storage & Controllable Loads.. Philipp Braun, Lars Grüne,
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
The MM implements a simple strategy in order to set prices for buying and selling electricity within the residential network, with a view to minimizing the aggregate impact of the
