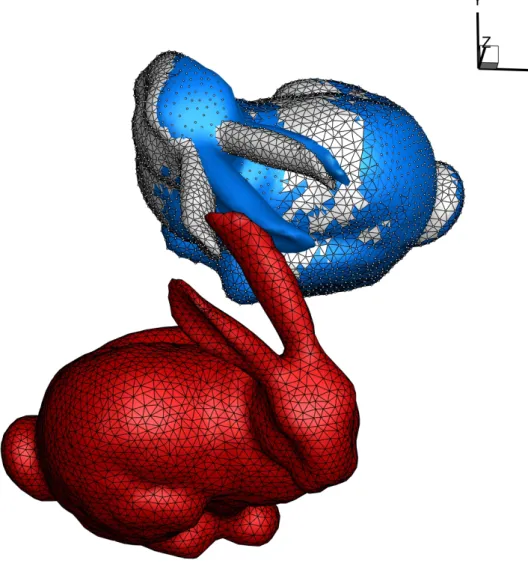
Computational vademecums for the real-time simulation of haptic collision between nonlinear solids
Texte intégral
Figure


Documents relatifs
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Two implementations are currently developed in parallel; one based on a relational database (postgres/postgis) and a second one based on Flink (Salmon et al., 2015) to cope
Water vapor advection and the subsequent formation of clouds quite differ when we compare these brand new high resolution simulations and the usual lower resolution ones at 64 per
Using the repertory grid and a Delphi survey to develop quality criteria genuine to humanities research, we were able to identify indicators that also reflect the ‘traditional’
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
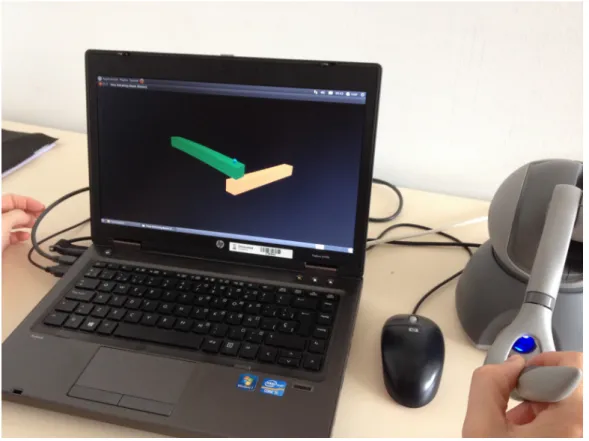
It relies on a high efficiency collision detection algorithm for deformable surface meshes, combined with an efficient FEM-based simulation of deformable surfaces enabling
The steps of the methodology are the fol- lowing: (1) introduction of a family of Prior Algebraic Stochastic Model (PASM), (2) identification of an optimal PASM in the
Those characteristics include the distinction between static and dynamic occurring tasks, bring out tasks whose execution time may change over the time and determine the number
