THERMOELASTICITE ET AMORTISSEMENT
PAR THERMOCONDUCTION
J.F. DEBONGNIE I.C.M.E. (Mécan.), Lg, 1973 Dr. Sc. Appl. 2010Introduction
Les pages qui suivent constituent un exposé de la thermoélasticité dans le cadre des grands déplacements, avec petites déformations. Il s’agit d’un travail que nous avons entrepris lors d’un séjour à l’E.N.S.M. de Nantes en 1985, puis retravaillé par morceaux depuis lors.
Le premier chapitre rappelle les notions fondamentales de la cinématique et de la statique des milieux continus.
Dans le second chapitre sont traitées les lois constitutives. Adoptant le cadre naturel de la thermodynamique, avec l’hypothèse de l’équilibre local, on obtient simplement les lois de la thermoélasticité, ainsi qu’une série de relations et d’inégalités utiles. Les cas extrêmes de la déformation isotherme et de la déformation isentropique sont pris en considération.
Le troisième chapitre présente une application un peu inattendue de la thermoélasticité, à savoir, l’amortissement par thermoconduction.
Chapitre 1 : Cinématique et statique des milieux continus
1. Cinématique des milieux continus
Soit un corps continu déformable. Nous utiliserons une variable d’évolution, que l’on peut assimiler au temps, bien que cela ne soit pas nécessaire. En t =0, le corps occupe un certain volume de l’espace V, où chaque point P peut être repéré par ses coordonnées cartésiennes x . C’est la configuration de référence. A l’instant t, il occupe un volume V’, où i le point P susvisé a pris une nouvelle position P’ de coordonnées x' . C’est la configuration i
réelle ou position déformée (fig. 1).
Figure 1 – Configuration de référence et configuration déformée On appelle déplacement le vecteur
' ( 'xi xi)
= − = − i
u P P e (1)
En mécanique des fluides, il est d’usage courant de considérer u comme une fonction des coordonnées x' , car on s’intéresse le plus souvent à un écoulement dans une zone limitée de i l’espace, avec une entrée et une sortie pour le fluide (fig. 2). C’est la description eulérienne.
Figure 2 – Problème typique d’écoulement
En mécanique des structures, au contraire, il convient de suivre le corps dans sa déformation et c’est la description lagrangienne qui s’impose. On considère donc le déplacement comme une fonction des coordonnées de référence x .
A ces deux points de vue correspondent deux systèmes de coordonnées pour la position réelle. Dans le point de vue eulérien, on repère un point par ses coordonnées
spatiales x' : on a donc i
'=x'i i
P e (2)
Mais les coordonnées spatiales sont en fait l’inconnue du problème, ce qui rend la description implicite. Tel que le problème se pose, il faut construire une description qui suive la matière. A cette fin, traçons dans la pensée, sur le corps non déformé, un réseau de coordonnées x . Ce i
réseau, bien qu’il se déforme avec le corps, n’en reste pas moins capable de repérer les points du corps. Il définit dans l’espace occupé par le corps un système de coordonnées curvilignes dont les vecteurs de la base covariante
' i x ∂ = ∂ i P E (3)
ne sont en général ni orthogonaux, ni normés. C’est ce que l’on appelle le système des
coordonnées convectées. Il est bien clair que lors de la déformation, un point donné du corps
conserve toujours la même valeur algébrique des coordonnées convectées qui apparaissent donc comme des coordonnées lagrangiennes. Introduisant la matrice jacobienne
j i ij x J = ', , (4) on a visiblement
(
)
, , ' 'j 'j i ji i i x x J x ∂ = = = = ∂ i j j j P E e e e (3’)L’élément de volume de référence construit sur les trois vecteurs élémentaires
, ,
i j k
dP=dxei dQ=dy ej dR=dz e k
est donné par
k j i ijk k j i kdxdx dz e dxdx dx e dV =(dP×dQ)⋅dR=(ei×ej)⋅ = , (4) où e est le symbole alternateur. Dans la configuration réelle, ces trois vecteurs élémentaires ijk
deviennent (avec dXi =dxi,...)
'=dx'i i =dXi i, '=dYj j, d '=dZk k,
dP e E dQ E R E
et l’élément de volume réel est donc
(
)
' i j k
=J J Jli mj mk
(
el×em)
⋅en dX dY dZi j k =elmnJ J Jli mj nk dX dY dZi j k=e J dX dY dZijk i j k,
où J est le jacobien de la transformation. On a donc JdV
dV'= (5)
La conservation de la masse élémentaire s’exprime par la relation ' ' dm=ρ dV =ρ dV , (6) ce qui implique J ' ρ ρ = .
En particulier, comme la masse volumique doit toujours rester strictement positive et finie, on obtient la condition
0 >
J (7)
c’est-à-dire que le jacobien de la transformation x→x' doit être positif. Il en découle notamment que la base covariante
{
E E E1, 2, 3}
garde nécessairement la même orientation (dextrorsum ou sinistrorsum) que la base{
e e e1, 2, 3}
.2. Tenseur métrique et base contravariante des coordonnées convectées
Dans les coordonnées convectées, un vecteur u défini au point P admet le développement
i
U
= i
u E , (8)
les Ui étant les composantes contravariantes de ce vecteur ; On peut calculer la norme du vecteur par 2 i j i j ij U U E U U = ⋅ = i⋅ j = u u u E E , (9)
où apparaît le tenseur ij
appelé tenseur métrique. Mais si l’on donne le vecteur u, comment déterminer ses composantes contravariantes ? Multipliant scalairement la définition (8) par E , on obtient j
i i ij U U E ⋅ j = i⋅ j = u E E E (11) Les grandeurs j U = ⋅u E j (12)
sont appelées composantes covariantes de u. On est donc ramené au système linéaire j
i jiU U
E =
qui admet pour solution j ij i U E U = , (13)
en notant Eij le tenseur inverse de E , appelé tenseur métrique inverse. La relation (11) ij
entraîne encore, après multiplication par Ejk,
jk i jk i k k ij i E U E E Uδ U ⋅ j = = = u E , soit k k U = ⋅u E (14)
en introduisant la base contravariante
{ }
Ek définie par k klE
= l
E E . (15)
Il est clair que l’on a k k
U
=
u E . (16)
Il est possible de définir des tenseurs dans le système convecté, mais il faut prendre garde à la position des indices. C’est d’ailleurs ce qui nous a fait écrire, au paragraphe précédent, Xi
pour xi. La remarque fondamentale est que la contraction d’un vecteur covariant avec un vecteur contravariant donne un scalaire indépendant du système de coordonnées : en effet,
i j j i i
j i j i
U V δ U V U V
⋅ = i⋅ = =
De même, une grandeur à deux indices est un tenseur covariant contravariant mixte ⎧ ⎫ ⎪ ⎪ ⎨ ⎬ ⎪ ⎪ ⎩ ⎭ et on la note ⎪ ⎭ ⎪ ⎬ ⎫ ⎪ ⎩ ⎪ ⎨ ⎧ i j ij ij A A A . si l’on a inv V U Aij i j = inv V U Aij i j = inv V U A.ij i j =
On notera que la symétrie ne se conçoit que pour les tenseurs covariants ou contravariants. Examinons à présent les relations entre composantes convectées et composantes spatiales. On a
i ji ji j
U = ⋅u Ei = ⋅u J ej =J u (17.1)
Par ailleurs, comme
ij ki lj k l ki kj E =E Ei⋅ j =J J e e =J J , on a 1 1 − − = il jl ij J J E et 1 1 1 1 i ij il jl mj il lm il E J J J− − J−δ J− = j = ⋅ m = m = l E E e e e , (17.2) donc 1 i i il l U = ⋅u E =J u− (17.3)
3. Statique des milieux continus
La statique des milieux continus repose sur la notion de contrainte. Précisons que les contraintes sont toujours définies dans la configuration réelle. Les différentes définitions que nous en donnerons ne diffèrent que par le système d’axes utilisé ou par une petite correction scalaire. Contrairement à une opinion répandue, il n’y a donc pas à proprement parler de contraintes lagrangiennes et de contraintes eulériennes, mais un seul tenseur de contraintes, que l’on peut exprimer dans différentes bases.
Adoptons d’abord le système d’axes spatial
{
e e e1, 2, 3}
. La force df passant par un élément dS’ de surface réelle est décomposée eni
df
= i
df e
On définit alors le vecteur traction de surface
' dS df
t i
i =
Si n' est la normale unitaire à cet élément de surface, on décompose alors ti en
ji j i n
t = ' τ
où τji sont les contraintes dans le système spatial ou contraintes eulériennes. Au total, l’élément de force s’exprime donc par
'j ji '
n τ dS
= i
df e (18)
La même décomposition vaut pour les forces intérieures, à condition de faire les coupes nécessaires. Ceci permet de définir les contraintes en tout point du corps.
Pour obtenir les équations d’équilibre, nous partirons du principe des travaux virtuels, qui stipule qu’à l’équilibre, le travail virtuel des forces extérieures (forces de volume et de
surface) égale le travail virtuel des forces intérieures (contraintes).
Soit δ le travail virtuel spécifique (c-à-d par unité de masse) des forces intérieures. w Le travail virtuel de ces forces sera donc
∫
= ' ' ' V dV w W ρ δ δOn notera que δ est indépendant du système de coordonnées. Les forces massiques sont de w la forme ρ'gdV', et leur travail virtuel est donc
∫
' ' ' V i i u dV g δ ρEnfin, les forces de surface ont un travail
' ' ' 'j ji i ' S S dS n τ δu dS ⋅ =
∫
dF u∫
Le principe des travaux virtuels s’exprime donc par
∫
∫
Le dernier terme peut, par le théorème d’Ostrogradski, être mis sous la forme
(
)
∫
∫
+∫
∂∂ ∂ ∂ = ∂ ∂ ' ' ' ' ' ' ' ' V V V j i ji i j ji i ji j dV x u dV u x dV u x δ τ δ τ δ τOn a donc, quel que soit le volume V’ considéré dans le corps continu,
∫
= ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ + ∂ ∂ + + − ' 0 ' ' ' ' ' V j i ji i j ji i i dV x u u x u g w ρ δ τ δ τ δ δ ρ (19) ce qui implique j i ji i j ji i i x u u x u g w ' ' ' ' ∂ ∂ + ∂ ∂ + =ρ δ τ δ τ δ δ ρ (20)A ce stade, nous ferons appel à un second principe fondamental de la statique, à savoir, que
dans un corps rigide, les forces intérieures ne travaillent pas. Il en découle évidemment que, chaque fois que, dans une partie V’ quelconque du corps, le déplacement virtuel est un mouvement de corps rigide, on doit avoir δw=0 pour cette partie du corps. Les
déplacements de corps rigide peuvent être des translations ou des rotations. Une translation virtuelle de corps rigide est de la forme
cte a ui =δ i =
δ , ce qui implique, par (19),
∫
⎟⎟ = ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ + ' 0 ' ' ' V j ji i i dV x g a ρ τ δquels que soient V’ et δai. On en déduit l’équation locale d’équilibre de translation
0 ' ' + = ∂ ∂ i j ji g x ρ τ (21) qui ramène (19) à
∫
= ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ + − ' 0 ' ' ' V j i ji dV x u w τ δ δ ρ (22) et (20) à ui ji x w ' ' ∂ ∂ =τ δ δ ρ (23)Une rotation virtuelle d’ensemble est de la forme cte w x e ui = ipqδωp q δ p = δ ' , , ce qui donne p ipj j i e x u δω δ = ∂ ∂ ' On déduit donc de (21) ∫ = ' 0 ' V ji p ipj dV e δω τ
quels que soient V’ et δω , soit p 0
= ji ipj
e τ , (24)
condition qui équivaut à la symétrie du tenseur τij.
Cette description comporte l’avantage de la simplicité de la définition des contraintes. En particulier, les contraintes équivalentes de Von Mises se calculent aisément dans ce système d’axes. Par centre, les équations d’équilibre impliquent la dérivation par rapport aux positions rélles qui sont inconnues a priori. De plus, les directions des axes n’ont rien à voir avec les directions éventuelles d’anisotropie du corps déformé. Enfin, la densité du travail des forces intérieures a pour expression
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ = i j j i ij x u x u w ' ' 2 1 'δ τ δ δ ρ , (25)
mais comme les symboles de variation δ (typiquement lagrangiens !) ne commutent pas avec les dérivées spatiales, la grandeur entre parenthèse n’est pas la variation d’un tenseur simple.
3.2. Les contraintes dans la base convectée
Reprenons la décomposition dans la base convectée. Nous écrirons i
dF
= i
df E
et définirons les tractions de surface
' dS dF T i i =
Notant alors N ' les composantes covariantes de la normale unitaire, nous écrirons, par i
analogie avec la décomposition précédente, ji j i T N T = ' ,
ce qui définit les contraintes dans le système convecté T . Au total, l’élément de force ji
s’exprime donc par ' ji '
j N T dS
= i
df E (26)
Pour trouver la relation entre T et ij τij, exprimons N ' et j E dans la base spatiale : on i
obtient, par (3’) et (17.1) ' ji ' kj k li J n T J dS = l df e ce qui, comparé à (18), 'k kl ' n τ dS = l df e , conduit à ji li kj kl = J J T τ (27)
De la relation (25), on déduit donc
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ + ∂ ∂ = k l l k ij lj ki x u x u T J J w ' ' 'δ δ δ ρ Or, m k ml m k l m l k u J u x x x u , 1 , ' ' δ δ δ = − ∂ ∂ = ∂ ∂ ce qui conduit à
(
ml km mk lm)
ij lj kiJ T J u J u J w 1 , 1 , ' 2ρδ = −δ + −δ(
ki k j lj li)
ij u J u J T δ , + δ , =(
)
(
)
[
ki ki k j lj l j li]
ij u u u u T δ , + , δ , + δ + , δ , =[
i j ji ki k j k j ki]
ij u u u u u u T δ , +δ , + ,δ , + ,δ , =ij ij T w δγ δ ρ' = , (28)
en introduisant le tenseur de GREEN
(
i j ji ki k j)
ij u, u , u ,u , 2 1 + + = γ (29)3.3. Les contraintes de KIRCHHOFF-TREFFTZ
Le travail des forces intérieures a donc pour expression
∫
=∫
= ' ' ' ' ' V V ij ij V T wdV W ρδ δγ δ δOn peut également l’exprimer dans la configuration de référence : notant que , ' ' dV dV ρ ρ = on a
∫
= V ij ij dV T W δγ ρ ρ δ 'Ceci suggère l’introduction des grandeurs ij ij T ' ρ ρ σ = (30)
appelées contraintes de Kirchhoff-Trefftz, qui permettent d’écrire
∫
= V ij ij dV W σ δγ δ (31)On remarquera qu’en pratique, on rencontre essentiellement les deux situations suivantes : a) Les déformations sont petites. Alors, ρ ≈ ρ'
b) Les déformations sont grandes. Cela se produit dans le cas de la plasticité, où ρ ≈ en ρ' négligeant la petite déformation élastique, ainsi que dans le cas des matériaux très déformables comme le caoutchouc, qui sont incompressibles, c’est-à-dire que ρ ≈ . On ρ' constate donc que, dans les situations courantes, on peut pratiquement confondre les contraintes de Kirchhoff-Trefftz avec les contraintes dans la base convectée.
Nous allons montrer que ces nouvelles contraintes admettent une interprétation physique simple. Introduisant
ij ij T σ ρ ρ' = ,
dans la relation (26), on obtient ' 'j ij ' N ρ σ dS ρ = i df E .
Or, le vecteur 'n dS', élément de surface orienté peut s’exprimer comme suit : en un point de la surface réelle, considérons deux vecteurs élémentaires tangents à la surface,
'=dxi i, '=dy Ej j
dP E dQ
Ils définissent un élément de surface 'dS'= '× '= i× j dx dyi j n dP dQ E E On a donc
(
)
' ' ' ' i j i j k ijk N dS =n dS ⋅Ek = Ei×Ej ⋅Ek dx dx =e J dx dx Il en découle ' q jpq ij J e ρ dx dxρ σ ρ = i df Eet, comme on a toujours ρ= ρ'J, q jpq ij e dx dxρ σ = i df E Mais
(
))
q jpq j e dx dxρ = dP dQ e× ⋅ =j n dSc’est-à-dire la surface orientée de référence, ce qui signifie que j ij
nσ dS
= i
df E (32)
En d’autres termes, on décompose d’abord df dans la base convectée : i
dF
= i
puis on définit les tractions de surface par dS dFi
, au moyen de l’élément de surface de
référence. Ensuite, on pose
ji j i n dS dF σ = (34)
avec la normale unitaire de référence. Cette interprétation est due à Trefftz.
3.4. Equilibre en termes des contraintes de K.T.
Nous appliquerons encore le principe des travaux virtuels. Tout d’abord, le travail des forces intérieures s’écrit
∫
=∫
= ' ' ' V V dV w dV w W ρδ ρδ δ .Le travail virtuel des forces massiques a pour expression
∫
=∫
' ' ' V V i i i i udV g u dV gδ ρ δ ρet celui des forces de surface a pour expression j ji surf S nσ δ dS ⋅ = ⋅
∫
δu dF∫
Ei u et comme , 'k i k ki k x u J u δ δ δ ⋅ = = ⋅ i E u on obtient la condition∫
=∫
+∫
V V S k ki ji j i i udV n J u dS g wdV ρ δ σ δ ρδqui se ramène aisément à
(
)
, , 0 i i ji ki j k ji ki k j V w g u J u J u dV ρ δ ρ δ σ δ σ δ ⎡− + + + ⎤ = ⎣ ⎦∫
Le raisonnement est le même qu’en axes cartésiens. Tout d’abord, pour une translation de corps rigide, on obtient
(
)
, 0i i ji ki j V
x g J dV
ce qui conduit aux équations d’équilibre de Signorini
(
)
0 ,j+ i = ki jiJ ρg σ (35)Pour une rotation de corps rigide de la forme
q p kpq k e x u δω ' δ = , on a évidemment qj p kpq j k e J u δω δ , = , ce qui implique 0 = ji qj ki pqk pe J J σ δω ,
c’est-à-dire la symétrie du tenseur
ji ji ki qJ ji ki qJ qk J J J J T r τ ρ ρ ρ ρ σ ' ' = = = ,
ce qui n’a rien de particulièrement étonnant, d’ailleurs. Cette relation, explicitée en ji qi kj ji ki qjJ J J J σ = σ ,
peut être prémultipliée par Jrq−1Jsk−1, ce qui donne
sr rs σ
σ = (36)
L’équilibre de rotation se traduit donc encore par la symétrie des contraintes de Kirchhoff-Trefftz.
4. Interprétation du tenseur de Green
Considérons deux points voisins x et x dx+ . Leur distance dx est donnée par
i idx
dx
dx2 = .
Après déformation, ces points sont transportés en x' et x dx'+ ' et le carré de leur distance est devenu
i idx
dx dx'2 = ' '
Comme
(
ij i j)
j j j i i x dx u dx dx' = ', = δ + , , on a(
ij i j)
(
ik ik)
j k jk j k i i i idx dxdx u u dx dx dx dx dx' '− = δ + , δ + , −δ =2γjkdxjdxk (37)Il est donc bien clair que le tenseur γjk mesure les variations de distance entre les points et s’annule si et seulement si le mouvement est rigide.
On peut présenter les choses autrement. En effet, on a encore '= i dxi dx E , si bien que
(
)
2 2 ' ij i j dx − dx = E Ei⋅ j−δ dx dx , ce qui entraîne(
ij ij)
ij E δ γ = − 2 1 (38)Considérons alors un terme direct, par exemple γ : on a "
(
1)
2 1 2 1 11= E − γOr, e a une longueur unitaire ; après déformation, sa longueur peut être écrite sous la forme 1
1 1 ε = + 1 E Il vient alors
(
)
2 1 1 2 1 1 11 2 1 1 2 1 2 1 ε ε ε ε γ = + + − = + (39)et, si les déformations sont petites,
1 11 ε
γ ≈ (39’)
Passons aux termes croisés. Nous examinerons, pour fixer les idées, γ12. Avant déformation, e et 1 e sont perpendiculaires. Ils cessent de l’être au cours de celle-ci et on a 2
(
)
12 11 22 2 cos , 1 2 1 2 γ γ γ ⋅ = = + + 1 2 1 2 1 2 E E E E E ELa variation α de l’angle entre les deux vecteurs vérifie donc
22 11 12 2 1 2 1 2 sin 2 cos γ γ γ α α π + + = = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −
Pour de petites déformations, on a sinα ≈α et 1+2γ11 ≈1, 1+2γ22 ≈1, ce qui donne
12
2γ α ≈ .
Dans maintes applications, il est utile de calculer la dilatation volumique
' ' ρ ρ = dV dV . Il est bien clair que c’est le jacobien J ; mais on peut encore l’exprimer en termes du tenseur de Green. En effet,
( )
J J dtmE dtm J2 = T = , avec ij ij ij E =δ +2γUtilisant le développement classique
(
ij ij)
I( )
ij I( ) ( )
ij I ij dtm2γ −λδ =−λ3+λ1 2γ −λ 2 2γ + 3 2γoù I1, I2, I3 sont les trois invariants d’un tenseur symétrique, on obtient ici, comme λ =−1,
) 2 ( ) 2 ( ) 2 ( 1 ) (Gij I1 ij I2 ij I3 ij dtm = + γ + γ + γ =1+2I1(γij)+4I2(γij)+8I3(γij) avec ii ij I1(γ )=γ
(
ii jj ij ji)
ij I γ = γ γ −γ γ 2 1 ) ( 2( )
ij ij dtm I3(γ )= γDans le cadre des petites déformations, on peut se limiter au premier ordre, ce qui donne
(
)(
)
2 2 2 2 2 ' ' ' ) ( 2 dV dV dV dV dV dV dV dV O ii + − = − = + γ γ dV dV dV dV dV dV dV'− ⋅2 +( '− ) = = − ⋅⎢⎣⎡ + − ⎥⎦⎤ dV dV dV dV dV dV ' 2 ' soit 0 ) ( 2 ' 2 ' 2 2 = − − − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − γ γ O dV dV dV dV dV dV ii . On en déduit ) ( 2 1 1 ' γ γ2 O dV dV dV ii + + ± − = −Pour 0γij = , la variation de volume est nulle, ce qui exclut le signe négatif devant le radical. Par conséquent, ) ( ) ( 2 1 1 ' γ γ2 γ γ2 O O dV dV dV ii ii + = + + + − = − .
Chapitre 2 : Lois constitutives
1. Expression eulérienne du premier principe de la thermodynamique
Le premier principe de la thermodynamique stipule que la variation d’énergie interne est égale au travail des forces appliquées augmenté de la chaleur reçue par le corps. La variation d’énergie interne s’écrit
∫
= ' ' ' V dV u U ρδ δ (1)où δ est la variation d’énergie interne spécifique. A l’équilibre, nous savons que le travail u des forces appliquées s’écrit également
∫
= ' ' ' V dV w W ρδ δ (2)Il nous reste à calculer la chaleur entrante. A cette fin, on exprime le flux entrant dδQ' par une portion de surface dS' sous la forme
' ' . ' ' q n dS Q dδ =−δ (3) ' q
δ étant la densité de flux de chaleur sortant. Il vient donc
∫
=−∫
− = ' ' ' ' ' ' S S i in dS q dS n' . δq' dQ δ (4)En description eulérienne, on a donc, pour tout V’,
∫
=∫
−∫
' ' ' ' ' ' ' ' ' ' V V S i in dS q dV w dV u ρδ δ δ ρ soit encore,∫
∫
−∫
∂∂ ∂ ∂ = ' ' ' ' ' ' ' ' ' V V V i i j i ij dV q dV u dV u ξ δ ξ δ σ δ ρ ,ce qui mène à l’équation locale
i i j i ij q u u ξ δ ξ δ σ δ ρ ∂ ∂ − ∂ ∂ = ' ' (5)
2. Passage à la description lagrangienne
∫
= V dV u U ρδ δ , ainsi que∫
=∫
= V V ij ij dV dV w w ρδ σ δγ δEn ce qui concerne la variation de chaleur, notant que dV'=JdV , on a
∫
∫
− ∂ ∂ − = ∂ ∂ − = V V ji j i i i J J dV x q dV J q Q ' δ ' 1 ξ δ δAdmettons provisoirement l’identité de JACOBI
( )
1 =0 ∂ ∂ − ji j JJ x (6)Elle permet d’écrire
(
1)
, ' ji i i i j V V Q JJ q dV q dV x δ = − ∂ −δ = − δ ∂∫
∫
,en définissant le flux lagrangien j ji i JJ q q 1δ ' δ = − (7) qui vérifie visiblement
∫
− = V i indS q Q δ δ (8)Le premier principe se ramène alors à l’équation locale i i ij ij q u σ δγ δ , ρδ = − (9)
Il nous reste à démontrer l’identité (6). On a
( )
j ji j ji ji j x J J x J J JJ x ∂ ∂ + ∂ ∂ = ∂ ∂ − − −1 1 1 (10) Remarquant que kj lk k lk kl lk kl kl x J JJ x x JJ x J JJ x J J cof x J ∂ ∂ = ∂ ∂ ∂ = ∂ ∂ = ∂ ∂ = ∂ ∂ − − −1 2 1 1 ) ( ξ ,il découle de l’identité
( )
0 1 1 = ∂ ∂ = ∂ ∂ + ∂ ∂ − − lj l l lk kj l kj lk x x J J x J J δ que l lk kj J x J JJ x J ∂ ∂ − = ∂ ∂ −1 , d’où j ji l lk ik l lk kj ji j ji x J J x J J x J J JJ x J J ∂ ∂ − = ∂ ∂ = ∂ ∂ = ∂ ∂ − − − − − 1 1 1 1 1 δ ,c’est-à-dire l’opposé exact du premier terme de (10).
3. Principe d’équilibre local et entropie
A ce stade, il est nécessaire d’introduire le principe d’équilibre local. A priori, un corps continu dans lequel s’écoule de la chaleur n’est pas en équilibre – la température, par exemple, varie d’un point à l’autre. Intuitivement, en découpant le corps en fractions très petites, on verra les différentes propriétés physiques d’un morceau donné varier de moins en moins, et on pourra finalement les considérer comme à peu près uniformes dans ce morceau. Mais pour pouvoir appliquer à un petit morceau de volume dV les relations classiques de la thermodynamique, il faudra que ses dimensions soient encore suffisantes pour pouvoir la considérer comme un système comportant un grand nombre de particules. Cette possibilité fait l’objet d’un postulat, dit principe de l’équilibre local, dont la validité n’est prouvée que par le bon accord avec l’expérience des conclusions qu’on en tire. Pratiquement, l’application de ce principe n’est discutable qu’en présence de quasi-discontinuités comme les ondes de choc, qui se produisent sur une longueur de quelques parcours moyens seulement.
Dans le cadre de cette hypothèse, il est possible de définir localement une entropie
sdV
ρ et une température absolue T telles que
s T w
u ρδ e ρ δ
ρδ = + , (11)
où δwe représente la partie élastique du travail. La décomposition d
e w
w
u ρδ ρδ
ρδ = +
en travail élastique et travail dissipatif dépend du phénomène particulier pris en compte : viscosité, plasticité, etc…
i i d q w s Tδ ρδ δ , ρ = − (12) 4. Corps thermoélastique
Nous dirons qu’un corps est thermoélastique si le travail dissipatif est nul, 0
= d
w
δ (13)
et s’il existe des relations de la forme
∑
= ij ij (γ,T ) σ , (14) pouvant s’inverser en ) , ( T ij ij σ γ =Γ (15)Les relations (14) et (15) se différencient en dT d H dσij = ijkl γkl−βij (16) et dT d B dγij = ijkl σkl +αij (17)
Ces deux relations ne seront compatibles que si
dT dT H d B H dσij = ijkl klmn σmn + ijklαkl −βij , ce qui implique kl ijkl ij ijkl ijkl H H B = − β = α , 1 (18)
Les grandeurs H sont appelées modules élastiques. Les ijkl αij sont les coefficients de
dilatation thermique et on donne aux (−βij) le nom de contraintes de bridage par (degré)
Kelvin.
5. Déformations isothermes et isentropiques
Imaginons une déformation menée à ce point lentement qu’à chaque instant, on laisse au corps le temps d’échanger la chaleur nécessaire pour maintenir sa température constamment égale à celle de l’ambiance. Ces conditions définissent ce que l’on appelle une déformation
kl ijkl ij H δγ
δσ =
et l’énergie libre, définie par ) (u Ts f = ρ − ρ (19) vérifie w T s f σijδγij δ σijδγij ρδ ρδ = − = = (20)
Dans une déformation statique, le travail est donc la différentielle totale de l’énergie libre. Il en découle en particulier klij kl ij ijkl H f H = ∂ ∂ ∂ = γ γ ρ ) ( 2 , (21)
relation qui, ajoutée aux conditions jikl
ijkl H
H = et Hijkl =Hijlk (22)
qui découlent naturellement de la symétrie des contraintes et déformations, ramène le nombre de modules différents à 21 au maximum.
Le fait que le travail de déformation soit une différentielle totale porte le nom d’hyperélasticité [5]. Nous venons donc de voir que les déformations isothermes d’un corps thermoélastique sont hyperélastiques.
Il découle de (11) que l’hyperélasticité est également réalisée lors des déformations isentropiques. Les vibrations à relativement haute fréquence des solides peuvent approximativement être considérées comme isentropiques, dans la mesure où la chaleur n’a pas le temps de s’écouler pendant une oscillation. Dans ce cas,
u
dw ρδ
ρ = , (23)
et c’est l’énergie interne qui sert de potentiel. On peut donc définir de nouveaux modules, les
modules adiabatiques, par
kl ij ad ijkl u H γ γ ρ ∂ ∂ ∂ = 2( ) , (24)
à utiliser dans l’étude des vibrations rapides. Pour les obtenir, il suffit d’exprimer dans (16) la variation de température à l’aide de la condition δs=0. Ceci peut être réalisé de deux manières :
T T s s s ij T ij δ δγ γ δ γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ = (25)
On remarque d’abord que T
T s T δ γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂
est la chaleur absorbée par unité de masse à
déformation constante, cvδT , ce qui donne
T c T s ν γ = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ (26) Pour calculer T ij s ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂
γ , on part du fait que l’énergie libre a pour différentielle
T s f σijδγij ρ δ
ρδ = − , ce qui entraîne la relation
ij ij T ij T s σ β γ ρ γ + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ (27) Il vient donc ij ij T T c s β δγ ρ δ δ = ν + 1 , (28)
ce qui entraîne que, dans une déformation isentropique,
ij ij c T T β δγ ρ δ ν − = (29)
Introduisant cette valeur dans (16), on obtient
kl kl ij ijkl ij c T H β β δγ ρ δσ ν ⎟⎟⎠ ⎞ ⎜⎜ ⎝ ⎛ + = soit kl ij ijkl ad ijkl c T H H β β ρ ν + = (30)
(b) Une seconde approche consiste à considérer l’entropie comme une fonction des contraintes et de la température :
T T s s s ij T ij δ δσ σ δ σ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ = (31) Ici, la grandeur T T s T δ σ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂
représente la chaleur absorbée par unité de masse à contraintes
constantes, cpδT , ce qui donne
T c T s ⎟ = p ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ σ (32) On calcule T ij s ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂
σ en introduisant l’enthalpie libre
Ts u
g =ρ −σijγij −
ρ (33)
dont la différentielle vaut
T s d g γij σij ρ δ ρδ =− − , ce qui implique ij ij T ij T s γ α σ ρ σ = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ (34) On a donc ij ij p T T c s α δσ ρ δ δ = + 1 (35)
si bien que, lors d’une déformation isentropique,
ij ij p c T T α δσ ρ δ =− (36)
Introduisant ce résultat dans (17), on obtient
kl kl ij p ijkl ij c T H α α δσ ρ δγ ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = −1 soit
( )
ij kl p ijkl ijkl ad c T H H α α ρ − = − −1 1 (37)6. Relation entre cp et cv pour les solides
Les relations (30) et (37) sont évidemment équivalentes. Or, elles ne sont compatibles que si
( )
klmn im jn ad ad ijkl H H −1 =δ δ , soit, explicitement, jn im mn kl p klmn kl ij ijkl c T H c T H α α δ δ ρ β β ρ ν ⎟⎟⎠= ⎞ ⎜ ⎜ ⎝ ⎛ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + −1 , ce qui équivaut à 0 2 2 = − − ij mn kl kl v p mn ij p mn ij v c c T c T c T β α β α ρ α β ρ α β ρ soit à(
)
1 ⎥=0 ⎦ ⎤ ⎢ ⎣ ⎡ − −c T c c c T kl kl v p mn ij p v α β ρ α β ρCeci n’est possible que moyennant la relation suivante entre les chaleurs spécifiques :
T H c cp v ijklαijαkl ρ 1 = − (38)
Expérimentalement, il est assez aisé de mesurer le cp des solides. Par contre, la valeur de cv
est pratiquement inaccessible à l’expérience et on ne l’obtient en pratique qu’en faisant usage de la relation ci-dessus.
Le résultat (38) est l’équivalent pour les solides de la relation de Mayer des gaz parfaits
r c cp − ν =
Elle implique l’inégalité v
p c
7. Stabilité locale [6]
Une portion infinitésimale du corps sera stable si, plongée dans une enceinte adiabatique, elle conserve son équilibre. Un système adiabatique est en équilibre si son entropie atteint un
maximum. Il faudra donc que δs=0 et δ2s<0, pour des perturbations infinitésimales. Partant de l’équation
s T u σijδγij ρ δ
ρδ = + ,
on constate que les variables sont u,γij,s. Deux de celles-ci peuvent être prises comme variables indépendantes. Nous choisirons u et γij, ce qui implique δ2u=0,δ2γij =0. On a alors ij ij T u T s σ δγ ρ δ δ = 1 − 1 (39) et la condition δs=0 implique ij ij u σ δγ ρδ =
Différenciant (39), on obtient, après multiplication par ρ >0,
ij ij T u T s ρδ δ δ σ δγ ρδ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = 1 1 2
Il nous est à présent loisible d’exprimer les différentielles en termes des variables γij et T : on a successivement • T T T δ δ 1⎟=− 12 ⎠ ⎞ ⎜ ⎝ ⎛ • ij T ij ij ij T Ts T T s u δγ γ ρ δ ρ δγ σ ρδ γ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + = =σijδγij +ρcvδT +βijTδγij • T T H T T T Tσij σijδ ijklδγkl βijδ δ 1 ⎟=− 12 + 1 − 1 ⎠ ⎞ ⎜ ⎝ ⎛ ,
ce qui mène à la condition
( )
2 1 0 2 2 =− − < kl ij ijkl v H T T T c s ρ δ δγ δγ ρδ (40)Considérant des variations séparées de la température et des déformations, on obtient les conditions suivantes : 0 > v c (41a) 0 > kl ij ijkl
H δγ δγ (positive définition des modules élastiques) (41b) On notera que les modules adiabatiques vérifient
(
ij ij)
ijkl ij kl v kl ij ijkl kl ij ad ijkl H C T H H β δγ δγ δγ ρ δγ δγ δγ δγ = + 2 ≥Ils sont donc eux aussi définis positifs. Enfin, on déduit de (38) et (41b) que 0
> − v p c
c (42)
8. Petits accroissements de température et déformations Lorsque les déformations sont petites,
1 << ij
γ
et que, de plus, les accroissements de température sont faibles, ,
, o
o T
T
T = +θ θ <<
on peut développer l’énergie libre d’un corps thermoélastique en série de Taylor limitée au second ordre : θ ρ γ γ ρ ρ ρ o ij o ij o T f f T f f ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ + = ( ,0)
(
3 2 2 3)
2 2 2 2 2 , , , 2 1 2 1 γ θ ρ θ γ γ θ γθ θ γ ρ γ γ γ γ ρ O T f T f f o ij o ij kl ij o kl ij + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ ∂ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ ∂ +Identifions les dérivées qui apparaissent dans ce développement. Comme
T s f σijδγij δ ρδ = − , on obtient directement o o o ij o ij s T f f σ ρ ρ γ ρ ⎟ =− ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ , .
Les σ sont les contraintes résiduelles, présentes dans le corps dans son état de référence ; ijo s o est l’entropie spécifique dans l’état de référence. Pour ce qui est des dérivées secondes,
2 ij o ijkl ij kl o kl o f H σ ρ γ γ γ ⎛ ∂ ⎞ ⎛∂ ⎞ = = ⎜ ⎟ ⎜ ⎟ ⎜∂ ∂ ⎟ ⎝∂ ⎠ ⎝ ⎠ 2 ij o ij ij o o f T T σ ρ β γ ⎛ ∂ ⎞ =⎛∂ ⎞ = − ⎜ ⎟ ⎜ ⎟ ⎜∂ ∂ ⎟ ⎝ ∂ ⎠ ⎝ ⎠ o o o o T c T s T f ρ ρ ν ρ ⎟ =− ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ 2 2 Il vient donc
[
ijo ijo]
ij ijklo ij kl o o v o o s Tc H T f f ρ ρ θ ρ θ σ β θγ γ γ ρ 2 1 2 1 ) 0 , ( 2 + − + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − − ≈ (43)Lorsque l’on s’intéresse principalement à l’aspect mécanique, on peut ordonner ces termes d’après leur degré d’homogénéité en les déformations. On écrira alors
), ( ) , ( ) (θ ρ1 θ γ ρ 2 γ ρ ρf = fo + f + f (44) avec ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ = − = − − = kl ij o ijkl ij o ij o ij o o o o H f f T C s T f f γ γ γ ρ γ θ β σ γ θ ρ θ ρ θ ρ ρ θ ρ ν 2 1 ) ( ) ( ) , ( 2 1 ) , 0 ( ) ( 2 1 2 (45)
Les contraintes s’obtiennent par dérivation :
(
ijo ijo)
ijklo kl T ij ij H f σ β θ γ γ ρ σ ⎟⎟ = − + ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ = (46)L’entropie est donnée par
ij o ij o o v o ij T c s T f s ρ ρ ρ θ β γ ρ γ + + = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − = (47) On a donc
ij o ij o o v o ij o ij o o v o o o T c s T c s T s T Ts ρ θ ρ ρ θ ρ β γ ρθ ρ θ β θγ ρ = + = + + + + 2+ ) ( ,
ce qui entraîne, en notant que u(To,0)= f(To,0)+Toso,
(
ijo ijo o)
ij ijklo ij kl o o v o v o c Tc T H T u Ts f u ρ ρ ρ θ ρ θ σ β γ γ γ ρ 2 1 2 1 ) 0 , ( ) ( 2⎟⎟+ + + ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + = + = (48)L’équation linéarisée d’une isentrope (s=so) s’obtient à partir de (47)
o T c ij o ij o o vθ +β γ = ρ soit ij o v o o ij c T γ ρ β θ =− (49)
En réintroduisant cette valeur dans (44), on obtient
kl ij o kl o ij vo o o ijkl ij o ij o C T H O T u u β β γ γ ρ γ σ ρ ρ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + = 2 1 ) , ( ,
où se retrouvent les modules adiabatiques sous forme linéarisée.
9. Milieux élastiquement isotropes
Un milieu est élastiquement isotrope si, en l’absence de contraintes résiduelles et de gradients thermiques, sa densité d’énergie libre a une expression indépendante du système d’axes. Elle ne peut donc dépendre que des trois invariants I1(γ),I2(γ),I3(γ) du tenseur des déformations. En se limitant à une expression quadratique, la seule forme possible est
2 2 1 2 AI BI f = + ρ (50)
ou, ce qui est équivalent,
2 2 1 2 2 2 I GÎ K f = − ρ , (51)
où Î est le second invariant du déviateur 2 γij γij γllδij 3 1 ˆ = −
(
ii jj ij ji)
ij ij ij ij kk ii I γ γ γ γ γ γ γ γ γ γ 6 1 2 1 ˆ ˆ 2 1 ˆ ˆ ˆ ˆ 2 1 ˆ 2 = − =− =− + (52)L’avantage de l’expression (52) est que I et 12 (−Iˆ2) peuvent s’annuler séparément, que tous deux sont positifs et qu’en outre, l’annulation simultanée de ces deux grandeurs assure la nullité du tenseur γij. Pour assurer la stabilité locale, il faudra donc que
K >0, G>0 (53) Explicitement, on a donc ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = K G kk ll G kl kl f γ γ γ γ ρ 2 3 2 2 1 2 , ce qui entraîne ij ij kk ij K G γ δ Gγ σ 2 3 2 + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = (54) et kl ij jl ik ijkl G K G H δ δ ⎟δ δ ⎠ ⎞ ⎜ ⎝ ⎛ − + = 3 2 2 (55)
Pour chercher la relation inverse de (54), notons d’abord que
kk ll kk ll K G γ Gγ Kγ σ 3 2 3 3 2 ⋅ + = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = (56) ce qui implique ij ij kk ij K G G K γ δ σ σ 2 3 3 2 + − = et ij ll ij ij kk ij ij K G G KG G K G σ δ σ σ δ σ γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − − + − − = 9 1 6 1 2 1 6 3 2 2 (57)
L’usage courant des ingénieurs veut que l’on utilise plutôt les modules E et ν , appelés respectivement module de Young et coefficient de Poisson, tels que
ij ll ij ij E E σ δ ν σ ν γ =1+ − , (58)
K G E G E 9 1 6 1 2 1 1+ν = ν = − (59) On en déduit directement K G E E E 9 1 3 1 1 1 + = − + = ν ν (60)
En vertu des conditions (53), le module de Young E est positif. Quant au coefficient de Poisson, il vaut
1 3 2 3 2 1 1 3 1 2 3 9 1 3 1 9 1 6 1 + − = + − = + − = ⋅ = G K G KG K K G K G E E ν ν
C’est donc une fonction croissante du rapport
G K
qui, pour =0
G K
, vaut (-1) et, pour ∞ → G K , tend vers 2 1 . On a donc 2 1 1< < − ν (61)
Les relations (59) s’inversent en
) 2 1 ( 3 ) 1 ( 2 +ν = − ν = E K E G (62) et ν ν ν ν) 2 1 2 2 1 ( 3 6 9 1 6 1 6 3 2 − = − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = − G E G E K G KG G K , ce qui implique ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + = ij ll ij ij G γ ν νγ δ σ 2 1 2 (63) Les modules valent donc
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + = ik jl ij kl ijkl G H δ δ ν ν δ δ 2 1 2 (64)
[
ik jl ij kl]
ijkl E H− = +ν δ δ −νδ δ ) 1 ( 1 1 (65) 10. Isotropie thermoélastiqueNous parlerons d’isotropie thermoélastique si, en plus des conditions précédentes, on a ij
ij αδ
α = , (66)
c’est-à-dire que la dilatation thermique est identique dans toutes les directions. On a alors
ij ij ij kl ijkl ij H αδ Gαδ K G αδ Kαδ β 3 3 3 2 2 ⎟⋅ = ⎠ ⎞ ⎜ ⎝ ⎛ − + = = (67)
Dans ce cas, la relation entre modules adiabatiques et modules isothermes s’écrit à partir de (30) kl ij v ijkl ad ijkl K C T H H α δ δ ρ 2 2 9 ⋅ = − soit ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = = v ad ad C T K K K G G ρ α2 9 1 , (68) A partir de (37), on a
( )
ij kl p ijkl ijkl ad C T H H α δ δ ρ 2 1 1 − = − − − , ce qui donne p ad ad C T K K G G ρ α2 9 1 1 , 1 1 = = − (69) On déduit alors de (60) p ad C T E E ρ α2 1 1 = − , soitp ad C T E E E ρ α2 1− = , (70)
formule obtenue par Lord KELVIN en 1878 [8]. On déduit de (59) p ad ad c T E E E ρ α ν ν 2 1 1 1 1 − = = + + et p p p ad c T E c T E C T E ρ α ρ α ν ρ α ν ν 2 2 2 1 1 1 1 − + = − − + = (71) Enfin, ρ α α β ρ T K T c cp v ij ij 2 9 1 = = − , (72)
ce qui implique d’ailleurs par (68)
K K c c ad v p = (73)
11. Relations empiriques pour les chaleurs spécifiques [7]
A la suite d’expériences effectuées sur divers métaux, GRÜNEISEN a établi en 1908 la loi approchée suivante : la chaleur spécifique à pression constante c et le coefficient de p
dilatation thermique varient suivant la même loi. En d’autres termes, le rapport
p c
A= α (74)
est une constante du métal, indépendante de la température. En fonction de la constante de Grüneisen, on obtient
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ = − − + = − = ρ ρ ρ ν ν ρ ρ T c KA c c T c EA T c EA T c EA E E p v p p p ad 2 2 2 2 2 9 1 1 (75)
Comme K et ρ varient peu avec la température, on peut écrire ,
T BC c
cp − v = p (76)
en considérant B comme constant.
Mais il y a plus. LINDEMANN a montré en 1910 que le produit
M f o
BT
B = (77)
où T est la température de fusion et M, la masse atomique, est approximativement constant f pour tous les métaux, sa valeur étant
J kg
Bo =5,112.10−6 / (78)
ce qui permet d’écrire
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ − − − + = − − = = − f p o f p o f p o ad f p o p T T c B T T c B T T c B E E T T c B c c M M M M ad 3 2 1 1 3 2 1 3 2 1 1 2 ν ν ν ν ν ν (79)
ρ
c c cp − v
. Ainsi, pour l’aluminium, on a
M = 27 kg, cp = 896 J/kg/K, Tf = 931,2 K, Et, à 293,15 K, K kg J c cp v 34,88 / / 2 , 931 15 , 293 896 27 10 112 , 5 ⋅ 6⋅ ⋅ 2⋅ = = − − et 039 , 1 , 10 893 , 3 ⋅ 2 = = = − − v p ad p v p C C K K c c c
Par la formule exacte (72), on aurait trouvé
040 , 1 , 10 . 027 , 4 , / / 08 , 36 − = 2 = = − − K K c c c K kg J c c ad p p p ν ν
La différence des modules de Young est encore plus faible : le calcul donne 004 , 1 = E Ead .
12. Lois d’écoulement thermique
En description eulérienne, la loi de Fourier s’écrit
j ij i T q ξ λ ∂ ∂ − = ' ' & ,
où q'& sont les densités de flux par unité de temps. On passe aisément à la description i lagrangienne en s’aidant de la définition (7), transformée ici en
k ik i JJ q q& = −1 &' . On a donc l kj lj ik l j l kj ik i T JJ J T x JJ q , 1 1 1 ' , ' λ ξ λ − − − =− ∂ ∂ = &
j ij i T q& =−λ , (80) à condition de poser kl jl ik ij JJ J ' 1 1 λ λ = − − (81) La transformation inverse s’écrit
kl jl ik ij J J J λ λ' = 1 (82)
Pour autant que les déformations soient petites, il est raisonnable de supposer la constance des λij lors de la déformation. La variation subséquente des λ'ij exprime alors la variation des axes d’anisotropie. Dans le cas isotrope, on a
ij ij λδ λ = et λ λ λij ik jk Gij J J J J 1 1 ' = = ,
avec, pour de petites déformations, ),J =1+γii +O(γ2 Gij =δij +2γij, soit
))λ'ij=λδij(1+O(γ .
13. Positive définition des coefficients de conductivité thermique La variation d’entropie s’écrit
∫
∫
∫
∫
∫
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = − = = V V V S V i i i i i i i i dV T q dS T n q dV T q dV T q dV s S , , , 1 & & & & & & ρLe premier terme du dernier membre représente le flux d’entropie entrant par unité de temps dans le corps. Le second terme est donc la production d’entropie, nécessairement positive dans tout volume :
∫
⎟ =−∫
> ⎠ ⎞ ⎜ ⎝ ⎛ = V V i i i i dV T T q dV T q 1 2, 0, , & & Pce qui implique par (80) , , , 2 2 1 0 i i ij i j q T T T T T λ − & = > , (83)
quel que soit le gradient non nul de température. Cette condition ne sera vérifiée que si la matrice d’éléments λij est définie positive. Notons qu’elle est symétrique en vertu du principe de réciprocité d’ONSAGER [6,9].
14. Bilan thermique
Les contraintes étant élastiques, on déduit de (12) et (80)
( )
ij j i i i T q s T , , , λ ρ &= &− = (84)Tenant compte de la différentielle (28) de l’entropie, on obtient
( )
ij j i ij ij vT T T c , , λ γ β ρ &+ & = (85)On constate donc que le champ des températures dépend de la déformation. D’une façon équivalente, on peut développer l’entropie en termes de la température et des contraintes, ce qui donne
( )
ij j i ij ij pT T T c , , λ σ α ρ &+ & = (86)Dans le problème du calcul des contraintes thermiques d’une structure, les conditions aux limites thermiques sont données. Il s’agit de calculer le champ des températures et les contraintes qui en résultent. En imaginant le corps parfaitement bridé, on aura γij =0 et
( )
ij j i vT T c , , λ ρ &=A l’autre extrême, si les déformations étaient parfaitement libres et compatibles, on aurait 0 = ij σ et
(
ij j)
i pT T c , , λ ρ &=La solution exacte est intermédiaire. Comme Cρ ≈Cv, on voit que l’on peut, dans ce problème, négliger le couplage.
Mais le couplage est responsable d’un certain nombre de phénomènes secondaires, parmi lesquels l’amortissement par thermoconduction, qui fera l’objet du chapitre 3.
3. AMORTISSEMENT PAR THERMOCONDUCTION
1. Introduction
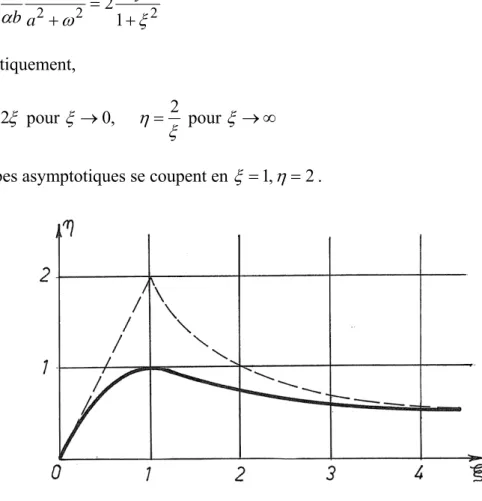
L’existence d’échanges de chaleur a notamment pour effet d’introduire un certain amortissement structural, même si les contraintes sont élastiques. Pour faire comprendre le phénomène, considérons un système unidimensionnel soumis à un cycle de contraintes rectangulaire de période longue (fig. 3).
Figure 3 – Sollicitation en escalier à longs paliers
La variation de contrainte étant instantanée, elle sera isentrope. Dès lors, la température variera, diminuant lors de l’extension et augmentant lors de la compression. Les paliers sont supposés suffisamment longs pour que l’équilibre thermique puisse se réaliser. Examinons ce qui se passe sur le diagramme (σ,γ) (fig. 4).