Aménagements commerciaux innovants : étude et développement d’un mécanisme de porte de cabine d’avion
Texte intégral
Figure




Documents relatifs
En règle générale, les porte-drapeaux, accueillis par l’Officiant (prêtre, pasteur, rabbin ou responsable des pompes funèbres) se placent de part et d’autre du
et Protection de la Santé sur le chantier du périphérique Nord La crise sanitaire a stoppé net le chantier mi-mars, quel a été votre rôle pour préparer sa reprise?. La DREAL
Les travaux préparatoires, de débroussaillage et d’abattage des arbres situés sur l’emprise des futurs ouvrages, réalisés en octobre novembre 2016, et les déplacements
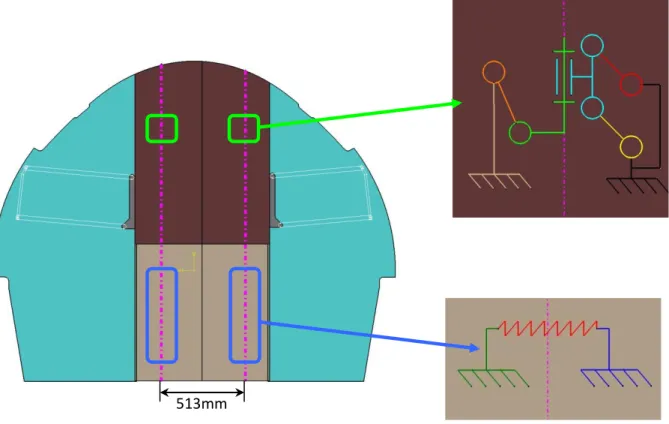
Le dispositif porte-outil d'une machine d'aûtage est schématisé par une système de trois solides
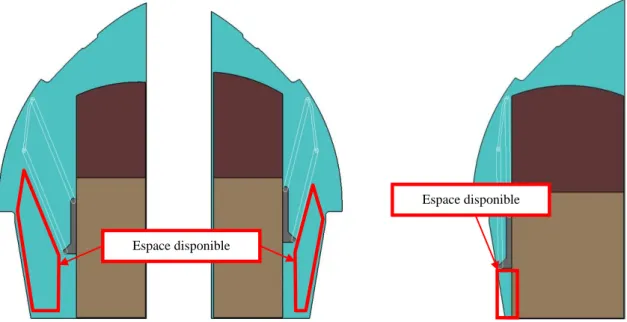
La porte 1est liée en E à un patin de guidage 5 qui coulisse verticalement dans le rail 0’. Un accompagnateur 3+4 composé de 2 tubes télescopiques et d’un ressort accompagne
L’énergie est transportée par les câbles principaux et est adaptée (réduction de la course et amplification de l’effort) par un « double moufle », l’un pour le câble
Dès le 1 er janvier 2022, la collecte des bacs gris individuels et des sacs jaunes s’effectuera une semaine sur deux, en adéquation avec le rythme actuel de présentation du bac
Un panneau1, Deux bras 2, Deux équilibreurs à ressort 3+4, Deux patins 5 pour guider le panneau dans les glissières 0.. Pour ouvrir ou fermer la porte, on commande le vérin
