Synchronization on the circle
Texte intégral
Figure



Documents relatifs
Put the verb into the correct form, simple present or preterit, active
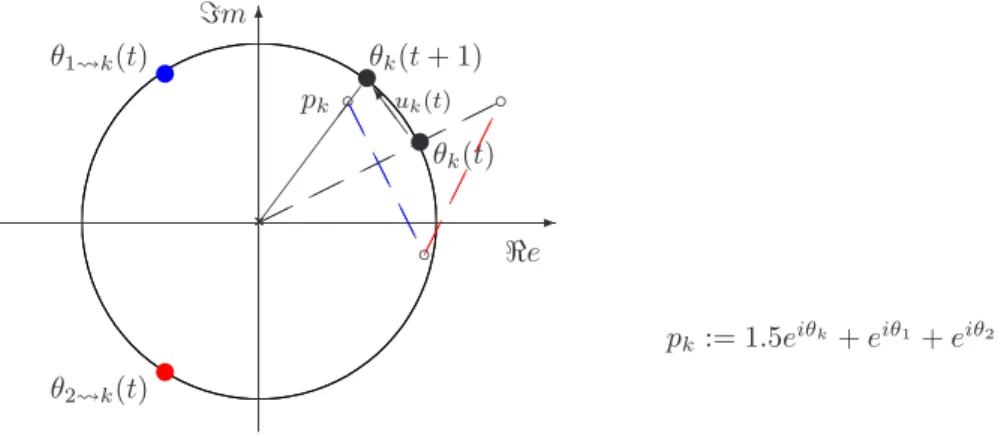
Keywords: Stochastic algorithms, simulated annealing, homogenization, probability mea- sures on compact Riemannian manifolds, intrinsic p-means, instantaneous invariant measures,
In the middle of your page, draw the 6 cm diameter long circle. Mark a point A on this circle and draw
Then draw the perpendicular bisector of segment [SA] : this line cuts line (d’) in point M.. Do it again and again with various points A placed regularly on
Nelly starts work at eight o’clock. She cleans the rooms in the hospital. Then, she helps the doctors. At twelve o’clock, she has lunch. She goes home at five o’clock. at half
The story is about: family sport school 1-LIstEN ANd CIrCLE thE rIGht ANswEr.(1pt). 2-LIstEN ANd wrItE trUE or fALsE ANd jUstIfy
across the endpoint of the circle, it passes through the centre point. Sylvain BOURDALÉ
across the endpoint of the circle, it passes through the centre point. Sylvain BOURDALÉ
