Reliable robot localization: a constraint programming approach over dynamical systems
Texte intégral
Figure


Documents relatifs
It proposes to extend the SOD-M model driven method with (i) the π -SCM an A-Policy services' composition meta-model for representing non-functional constraints as- sociated
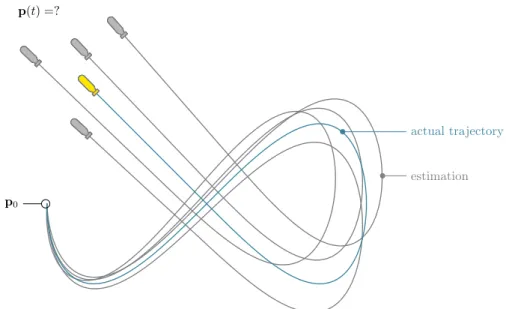
The main con- tribution of this paper is to provide a reliable method to prove the existence of loops along the uncertain trajectory of a robot, based on proprioceptive
Overall, this SYBR Green-based real-time PCR assay is a rapid, sensitive and highly specific detection assay for the mcr-1 gene either from cultured bacteria or from cattle or
The main con- tribution of this paper is to provide a reliable method to prove the existence of loops along the uncertain trajectory of a robot, based on proprioceptive
We have 10 unknowns for 6 equations: our robot has a second order hyperstatic equilibrium... A con fi guration where the middle wheel is
Reliable robot localization: a constraint programming approach over dynamical systems. PhD dissertation, Université de Bretagne Occidentale, ENSTA-Bretagne, France,
tams r = {r , m} (4) where tams r represents the task allocation message tams sent by seller robot r, r in the message means the number of the seller robot, m signifies the
In order to verify if the computing time of localization is compatible with the real time constraint of robotic application we have realized two evaluations.
