Metric generation for anisotropic mesh adaptation, with numerical applications to material forming simulation
231
0
0
Texte intégral
Figure
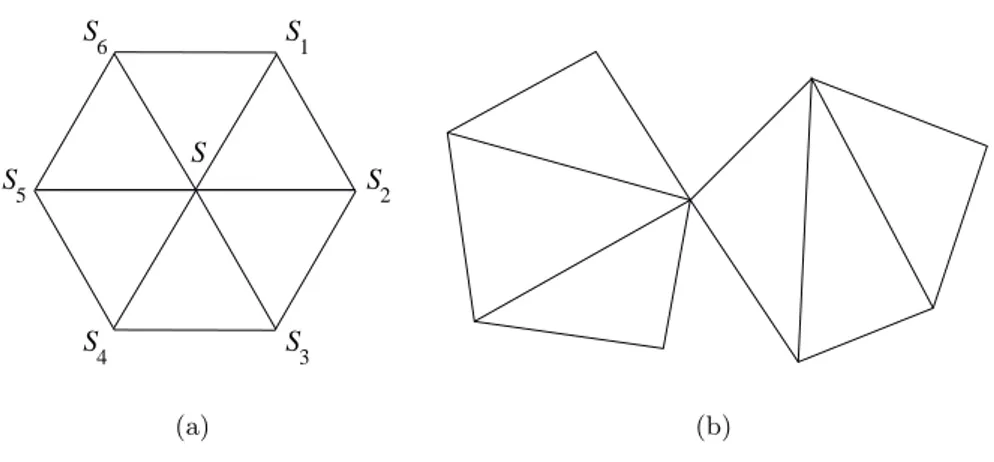
![Fig. 2.4 – m´ ethode de type Delaunay en 2D, triangulation de l’enveloppe convexe (a) et reconstruction de la fronti` ere (b) (tir´ e de [Ern et Guermond 2002])](https://thumb-eu.123doks.com/thumbv2/123doknet/2882773.73158/36.892.268.622.127.682/ethode-delaunay-triangulation-enveloppe-convexe-reconstruction-fronti-guermond.webp)
+7
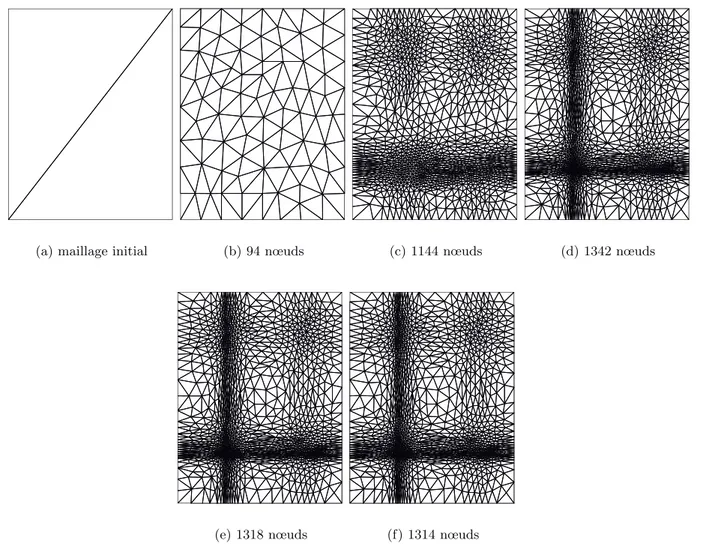
![Fig. 3.2 – Adaptation anisotrope par m´ ethode hybride Delaunay / frontale, maillage initial colonne de gauche et maillage final (8 it´ erations) colonne de droite (tir´ e de [Alauzet 2003])](https://thumb-eu.123doks.com/thumbv2/123doknet/2882773.73158/51.892.98.799.145.806/adaptation-anisotrope-delaunay-frontale-maillage-maillage-erations-alauzet.webp)


Outline
Documents relatifs