Systèmes mécaniques réversibles en dynamique holonome et non-holonome des corps solides rigides
Texte intégral
Figure

Documents relatifs
locaux ne peut pas être considérée, comme la totalité des espaces locaux tangents d’un même espace V~ et cela à cause du fait que l’on suppose que le
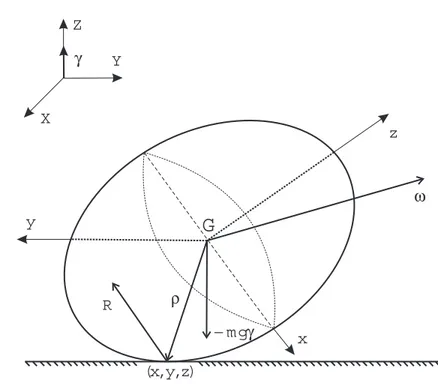
Une barre (S), homogène, mince, de longueur 2ℓ, de centre G et de masse m est posée sur un cylindre (C), de rayon R, fixe dans un repère galiléen R(O, xyz). Le contact entre la
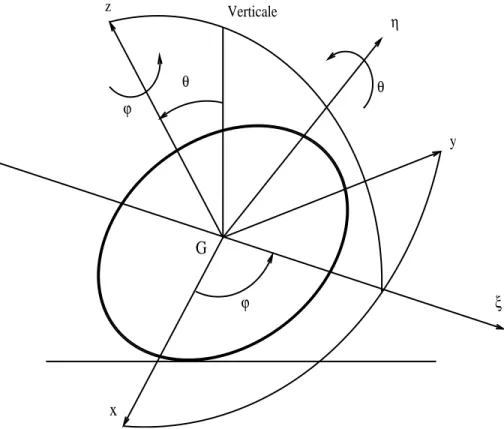
Le mouvement le plus général {infiniment lent) d^un corps solide possédant un point fixe s^ obtient par la composition d'une rotation uni/orme autour de la verticale et de
Pour un système holonome à paramètres indépen- dants la démonstration est immédiate ; 2 Î 2 étant la por- tion du second degré de la force vive, les q' figurent dans les
6 bis) (facultatif) Construire (num´eriquement) un mat´eriau compos´e de deux mat´eriaux homog`enes classiques (d´ecrits par leur coefficients de Lam´e), qui ait un comportement
Tout op´ erateur diff´ erentiel poss` ede une solution fondamentale.. De plus, toute solution fondamental est C ∞ sur R
Par rapport au mode de commande manuel, ce mode de commande a deux avantages : il permet que l’opérateur soit moins concentré sur le pilotage du robot et
Lorsque le second membre g est une fonction qui s’´ecrit comme le produit d’un polynˆome par une exponentielle e ↵x , il existe toujours une solution qui a une forme
