The recovery of target locations in space across movements of eyes and head
194
0
0
Texte intégral
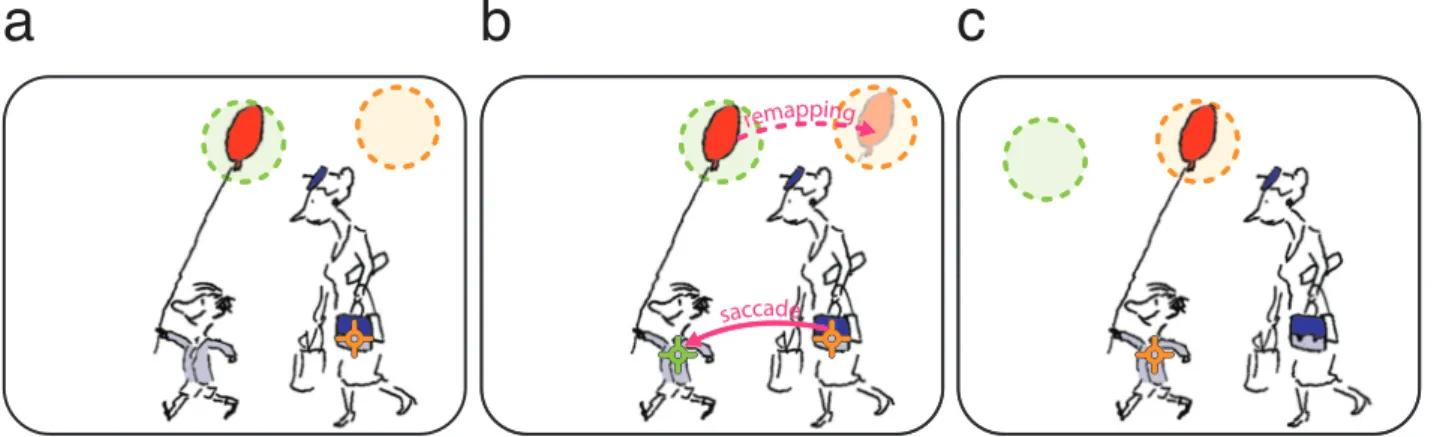
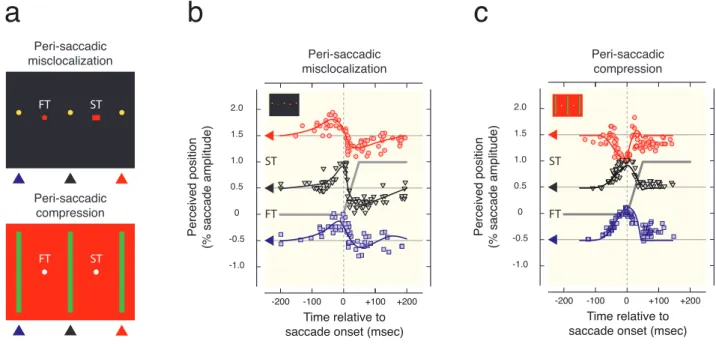
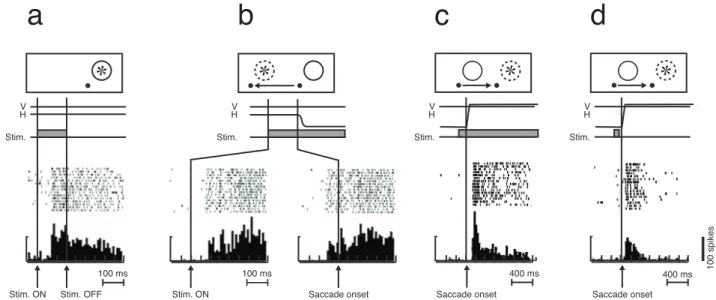
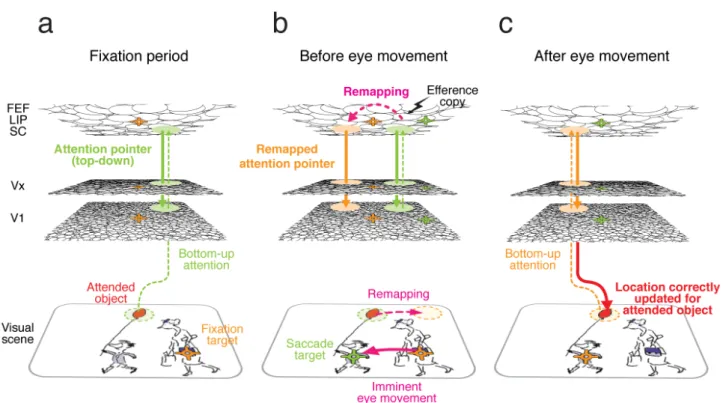
Figure



+7
Documents relatifs