Récupération d'énergie et magnétostriction
Contexte vibratoire
Mémoire présenté
à la Faculté des études supérieures de l'Université Laval dans le cadre du programme de maîtrise en génie mécanique
pour l'obtention du grade de Maître es Sciences (M.Sc.)
DÉPARTEMENT DE GÉNIE MÉCANIQUE FACULTÉ DE SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL QUÉBEC
2010
Ce présent ouvrage porte sur la conception d'un système récupérateur d'énergie vi-bratoire basé sur le phénomène magnétostrictif. Une analyse des différentes technologies de récupération vibratoire existantes est d'abord présentée et permet de démontrer le fort potentiel de la récupération énergétique par magnétostriction. Le phénomène ma-gnétostrictif est alors décrit théoriquement et analytiquement par le biais des lois et courbes de comportement qui permettent ainsi d'extraire une zone comportementale efficace. Un générateur de récupération d'énergie vibratoire qui utilise les paramètres et limites de cette zone de comportement est ensuite conçu. Ce récupérateur est modélisé en circuit ouvert par Bond Graph et les résultats de la simulation sont validés par un modèle éléments finis via une analogie avec la piézoélectricité. Le modèle Bond Graph ainsi validé permet alors de simuler la récupération d'énergie au travers d'une charge électrique résistive qui simule la partie électrique du récupérateur. Un générateur réel est finalement conçu et usiné et ses performances expérimentales en circuit ouvert sont évaluées et comparées à celles obtenues par la modélisation. Les points d'opérations optimaux théoriques et pratiques sont différents, ces différences étant causées par une modélisation s'appuyant sur le régime statique. Malgré cela, le prototype expérimental de récupérateur magnétostrictif parvient à générer une puissance électrique moyenne d'environ 70 à 80 mW à une fréquence de 850 Hz. Ainsi, ce récupérateur est, à la connaissance de l'auteur, le premier générateur à magnétostriction à récupérer autant de puissance de manière autonome.
Ce projet de maîtrise fut pour moi une expérience particulièrement enrichissante, tant sur le plan humain que scientifique. Je pense ainsi avoir progressé dans de nombreux domaines et je tiens à remercier ici les différentes personnes qui m'ont soutenu et aidé pendant ce projet.
Merci tout d'abord à mon directeur de recherche, Yves St-Amant, qui m'a confié ce projet alors que j'étais un étudiant fraîchement débarqué de France. Je suis très fier d'avoir collaboré avec toi Yves et je te souhaite une bonne continuation dans le développement du laboratoire LSMI.
Merci à David, Patrick, Simon, Olivier et Luc, étudiants au LSMI pour avoir répondu à mes questions et pour avoir rendu l'ambiance du laboratoire si agréable.
Merci aussi à Yves Jean, André Chamberland et Jean Claude Gariépy pour leur aide dans la conception et la réalisation du montage expérimental.
Merci à mes amis de Québec, particulièrement mes différents colocs : Bob, CA, Dave, Dom, Fouquet, Francis, PV, et Simon, qui m'ont supporté et encouragé pendant ces deux ans. Grâce à eux, j'ai eu la chance de véritablement connaître le Québec et je leur en suis très reconnaissant. Je n'oublie pas mes amis de France qui m'ont apporté leur soutien tout au long de ce séjour, merci à eux aussi.
Merci finalement à ma famille, notamment mes parents et mon frère, pour leur appui constant, tant lors de la décision de partir étudier à l'étranger, qu'au cours de ces deux années de maîtrise.
Résumé
Remerciements Table des matières Table des figures Liste des tableaux 1 Introduction 1.1 Revue de littérature 6 10 11 11 1 1.1 1.2 1.3 1.4 Technologie électromagnétique 12 Technologie piézoélectrique 14 Technologie électrostatique 17 Technologie magnétostrictive 19 Systèmes commercialisés 21 En résumé 21 Problématique de recherche 22 Objectifs de recherche 23 Présentation du mémoire 23 1.2 1.3 1.4 1.5 1.6
É t u d e du phénomène magnétostrictif et modélisation linéaire 25
2.1 Introduction 25 2.2 Théorie du comportement magnétostrictif 25
2.2.1 Différents effets magnétostrictifs 26 2.2.2 Mécanismes magnétostrictifs 28 2.2.3 Lois du comportement magnétostrictif 30
2.2.4 Matériaux magnétostrictifs 33 2.3 Courbes comportementales expérimentales 34
2.3.1 Étude magnéto-mécanique 35
2.3.2 Étude mécanique 36 2.3.3 Zone comportementale optimale 37
2.4 Modélisation linéaire des matériaux magnétostrictifs par Bond Graph et
analogie piézoélectrique 40 2.4.1 Modélisation des matériaux magnétostrictifs par Bond Graph . 41
2.4.2 Modélisation des matériaux piézoélectriques par Bond Graph . . 42
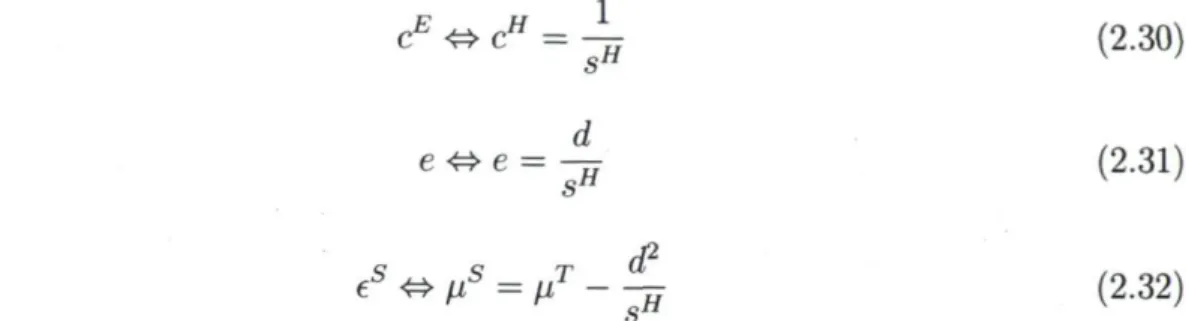
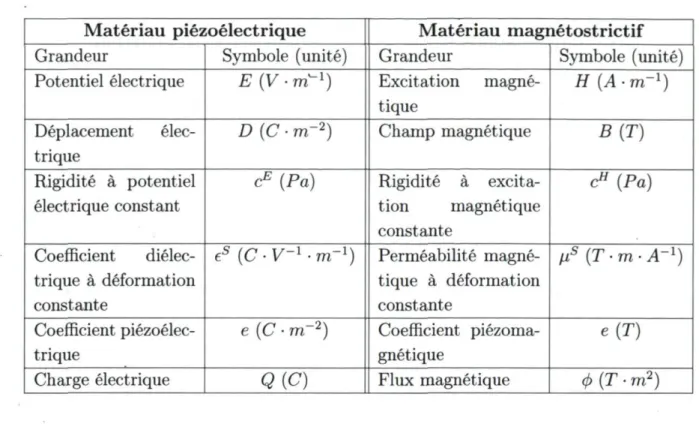
2.4.3 Analogie entre piézoélectricité et magnétostriction 44
2.5 Résumé 45 3 Conception du récupérateur et performances a t t e n d u e s 47
3.1 Introduction 47 3.2 Conception du récupérateur 47
3.2.1 Aspect mécanique 48 3.2.2 Aspect magnétique 49 3.2.3 Conclusion de la conception 51
3.3 Modélisations du récupérateur en circuit ouvert 54 3.3.1 Modélisation mécanique classique du récupérateur 54
3.3.2 Modélisation par Bond Graph 63 3.3.3 Modélisation par éléments finis 66
3.4 Validation du modèle Bond Graph avec la modélisation par éléments finis 70
3.5 Évaluation de la récupération d'énergie vibratoire 79 3.5.1 Détermination de la résistance optimale 80 3.5.2 Performances du générateur équipé de la résistance optimale . . 81
3.6 Résumé 86 4 É t u d e expérimentale 88
4.1 Introduction 88 4.2 Montage expérimental 88
4.2.1 Données expérimentales du récupérateur 89 4.2.2 Réalisation des mesures effectuées sur le récupérateur 89
4.2.3 Acquisition des mesures 94 4.3 Récupérateur en circuit ouvert 94
4.3.1 Point de fonctionnement théorique 94 4.3.2 Étude de sensibilité magnétique 97 4.3.3 Étude de sensibilité mécanique 98 4.3.4 Performances en circuit ouvert 103 4.3.5 Conclusion des essais réalisés en circuit ouvert 105
4.4 Récupérateur en circuit fermé 105 4.5 Comparaison avec divers récupérateurs 109
4.6 Discussion 111 4.7 Conclusion 112 5 Conclusion 114
Bibliographie 118 A Optimisation des caractéristiques du récupérateur 121
A.l Calcul de l'épaisseur du boitier 121 A.2 Calcul des paramètres du bobinage 124 A.3 Détermination de la hauteur des flasques 127
B Plans du générateur 130 C Modélisation Simulink du récupérateur 141
1.1 Évolution de diverses technologies depuis 1990 [23] 12
1.2 Générateur électromagnétique [2] 13 1.3 Types de polarisation pour une poutre bimorphe en flexion 16
1.4 Schéma de principe de conversion électrostatique 17 1.5 Trois types de structures possibles pour un générateur électrostatique en
micro-machinerie [25] 18 1.6 Principe de fonctionnement d'un générateur magnétostrictif 19
2.1 Effet Joule 27 2.2 Effet Wiedemann 27
2.3 Processus de première aimantation [13] 29 2.4 Évolutions (a) de la magnétisation M et (b) de la magnétostriction A en
fonction de l'excitation magnétique H lors de la première aimantation
du matériau 30 2.5 Dipôles magnétiques (a) à l'état libre, (b) en extension lorsqu'une
exci-tation H est appliquée suivant la direction d'aimanexci-tation facile et (c) en compression lorsque l'excitation magnétique H est transversale à la direc-tion d'aimantadirec-tion facile, cela dans le cas d'un coefficient magnétostrictif
positif 31 2.6 Définition des directions longitudinales et transversales d'un barreau
ma-gnétostrictif 32 2.7 Schéma du dispositif expérimental utilisé par Kellogg pour caractériser
les propriétés du Terfenol-D 34 2.8 Coefficient piézomagnétique du Terfenol-D en fonction de la contrainte
pour diverses excitations magnétiques de 0 à 193.2 kA/m par pas de 16.1
kA/m [13] 36 2.9 Magnétisation du Terfenol-D en fonction de la contrainte pour diverses
excitations magnétiques de 0 à 193.2 kA/m par pas de 16.1 kA/m [13] 37 2.10 Module d'Young du Terfenol-D en fonction de la contrainte pour diverses
excitations magnétiques de 0 à 193.2 kA/m par pas de 16.1 kA/m [13] 38 2.11 Déformation du Terfenol-D en fonction de la contrainte pour diverses
2.12 Modélisation de matériau magnétostrictif par capacitance multiport . . 42 2.13 Modélisation de matériau piézoélectrique par capacitance multiport . . 44
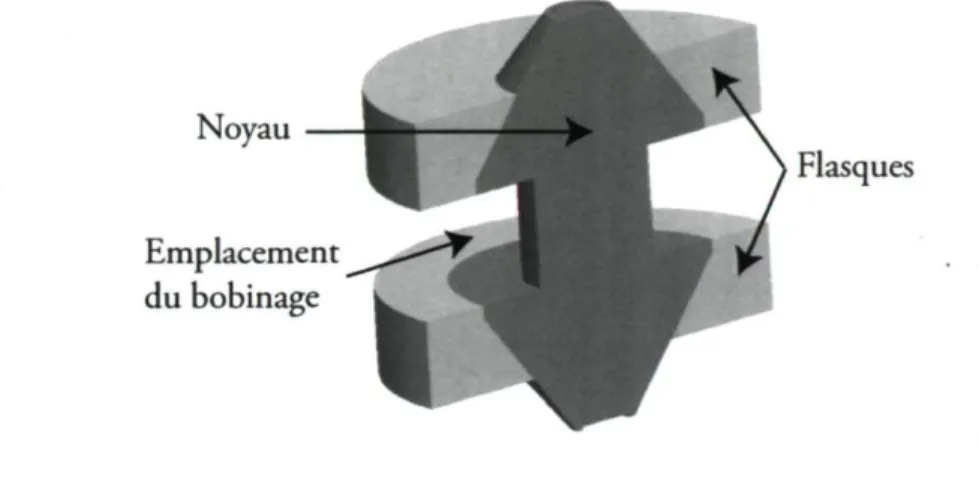
3.1 Configuration géométrique du système 48 3.2 Vue en coupe de la masse suspendue 50 3.3 Lignes de champ au sein du récupérateur (a) pour des flasques en acier
standard et (b) pour des flasques en acier inoxydable 50 3.4 Lignes de champ au sein du récupérateur (a) pour une densité surfacique
de courant de 3.6 xlO6 A ■ m~2, (b) pour une densité de courant 10 fois
supérieure et (c) pour une densité de courant 100 fois supérieure . . . . 51 3.5 Configuration géométrique du système et paramètres des composantes . 52 3.6 (a) Schéma du récupérateur, (b) modèle discret et (c) diagramme des
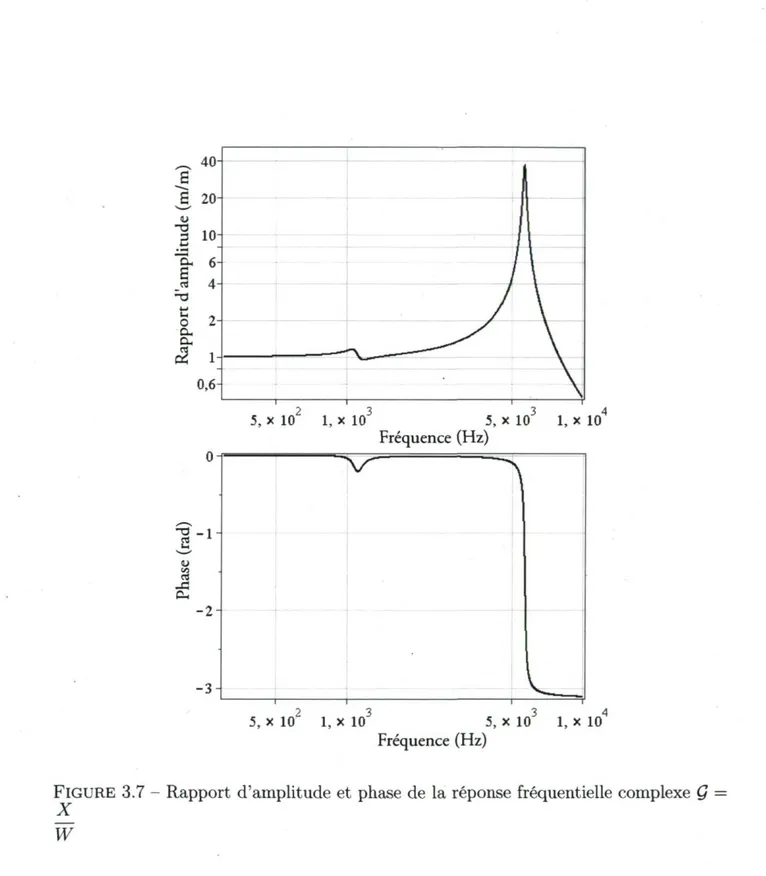
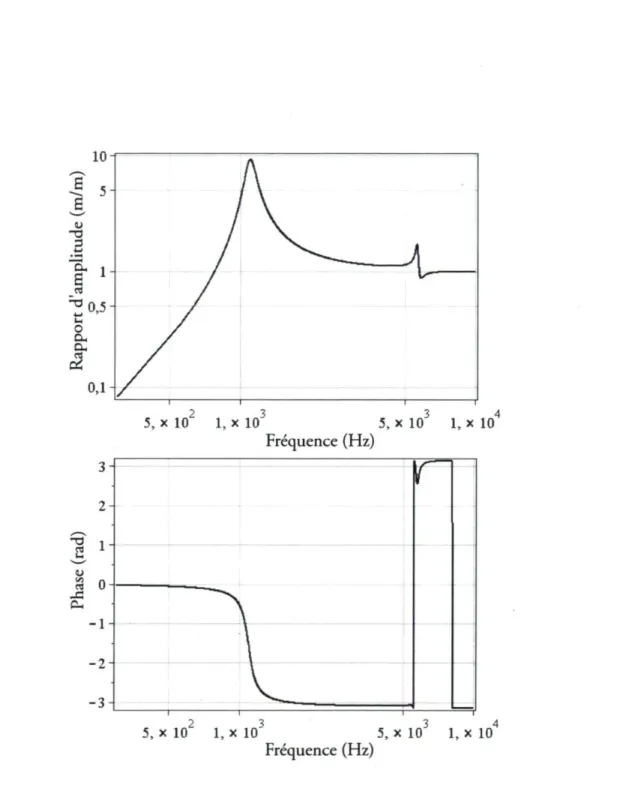
corps libres 55 3.7 Rapport d'amplitude et phase de la réponse fréquentielle complexe Ç =
X
w
583.8 Rapport d'amplitude et phase de la réponse fréquentielle complexe H — Y
w »
3.9 Rapport d'amplitude et phase de la réponse fréquentielle complexe I = Y X
— 6 1
3.10 Rapport d'amplitude et phase de la réponse fréquentielle complexe J = Y W
— 6 2
3.11 (a) Modélisation classique et (b) modélisation par Bond Graph du récu
pérateur en circuit ouvert 65 3.12 Rapport d'amplitude de la réponse fréquentielle entre la vitesse de la
masse suspendue et celle de la base 66 3.13 Vue en coupe du générateur modélisé sur Abaqus 67
3.14 Champ de déplacement au sein du récupérateur pour la fréquence de
1102.3 Hz, soit le premier mode de vibration axiale 70 3.15 Vitesse imposée à la base pour les deux modèles étudiés 71 3.16 Excitation magnétique imposée pour les deux modèles étudiés 72 3.17 Déformation du barreau magnétostrictif pour les deux modèles étudiés
et pour la totalité de la durée de la simulation 73 3.18 Déformation du barreau magnétostrictif pour les deux modèles étudiés 74
3.19 Vitesse de la masse suspendue pour les deux modèles étudiés 75 3.20 Contrainte au sein du TerfenolD pour les deux modèles étudiés . . . . 75
3.21 Champ magnétique produit pour les deux modèles étudiés 76 3.22 Force à délivrer par le pot, obtenue par le modèle Bond Graph 78 3.23 Modélisation Bond Graph du générateur alimentant des résistances élec
3.24 Puissance électrique instantanée en fonction de la résistance électrique . 80
3.25 Déformation au sein du TerfenolD en fonction du temps 82 3.26 Vitesse de la masse suspendue en fonction du temps 82 3.27 Contrainte au sein du TerfenolD en fonction du temps 83 3.28 Champ magnétique produit par le TerfenolD en fonction du temps . . 83
3.29 Excitation magnétique au sein du TerfenolD en fonction du temps . . . 84 3.30 Tension électrique aux bornes d'une résistance en fonction du temps . . 84 3.31 Puissance électrique instantanée récupérée par un barreau de TerfenolD
en fonction du temps 85 4.1 Configuration des essais expérimentaux 90
4.2 Photographie du montage expérimental 91 4.3 Interface Labview développée pour le projet 95 4.4 Réponses Séquentielles en amplitude (a) de la tension électrique e et (b)
de la contrainte T par rapport à la force F délivrée par le pot vibrant au
point de fonctionnement prévu par les modélisations 96 4.5 Réponses fréquentielle en amplitude (a) de la tension électrique e et (b)
de la contrainte dynamique T par rapport à la force F pour une défor mation statique constante de 200 pe et différentes valeurs d'excitations
magnétiques continues 98 4.6 Réponses fréquentielle en amplitude (a) de la tension électrique e et (b)
de la contrainte dynamique T par rapport à la force F pour une défor mation statique constante de 600 pe et différentes valeurs d'excitations
magnétiques continues 99 4.7 Réponses Séquentielles en amplitude (a) de la tension électrique e et
(b) de la contrainte T par rapport à la force F pour une excitation magnétique de 16.1 kA ■ m 1 et pour différentes déformations statiques
pour la phase de compression 100 4.8 Réponses Séquentielles en amplitude (a) de la tension électrique et (b)
de la contrainte par rapport à la force pour une excitation magnétique de 16.1 kAm~l et pour différentes déformations statiques pour la phase
de décompression 101 4.9 Réponses Séquentielles en amplitude (a) de la tension électrique et (b)
de la contrainte par rapport à la force pour une excitation magnétique de 16.1 kA ■ m"1 et pour différentes déformations statiques proches de
l'optimum pour la phase de décompression 102 4.10 Evolution temporelle (a) de la tension électrique e récupérée, (b) de la
force F , (c) de la vitesse du boitier et (d) de la contrainte T mesurées à une fréquence de 850 Hz, avec une excitation magnétique de 16.1 kAmT1
4.11 Circuit électrique connecté à la bobine entourant le barreau
magnétos-trictif inférieur 105 4.12 Puissance électrique moyenne en fonction de la charge résistive pour une
force excitatrice de 200 N à 850 Hz avec une excitation magnétique de
16.1 kA-m~l et une déformation initiale de 150 pe 106
4.13 Évolutions temporelles (a) de la force F du pot, (b) de la tension élec-trique récupérée, (c) du courant élecélec-trique, et (d) de la puissance pour une résistance de 6 Q à une fréquence de 850 Hz, avec une excitation
magnétique de 16.1 kA • m- 1 et une déformation initiale de 150 pe . . . 108
4.14 Puissance électrique moyenne obtenue par un barreau magnétostrictif en fonction de l'amplitude de force pour trois séries de mesures effectuées avec une charge résistive de 6 Q à 850 Hz avec une excitation magnétique
de 16.1 kA • m- 1 et une déformation initiale de 150 pe 109
A.l Configuration géométrique du système et paramètres des composantes . 122 A.2 Évolution de la fréquence propre du boitier en fonction du critère de
déformation 124 A.3 Vue 2-D de la masse suspendue 126
A.4 Vue en coupe de la masse suspendue 127 A.5 Configuration géométrique du noyau 127 A.6 Configuration géométrique d'un flasque 128
B.l Plan de l'assemblage du générateur 131
B.2 Plan du couvercle 132 B.3 Plan du noyau magnétique 133
B.4 Plan des flasques 134
B.5 Plan du fond du boitier 135 B.6 Plan des pôles magnétiques 136
B.7 Plan de la collerette 137 B.8 Plan de l'enceinte cylindrique du boitier 138
B.9 Plan des canules de bobinage 139 B.10 Plan de l'assemblage permettant d'intégrer le capteur de mesure de force 140
C l Modélisation Simulink du Bond Graph du générateur en circuit ouvert 142 C.2 Modélisation Simulink du Bond Graph du générateur en circuit fermé . 143
D.l Spécifications du Terfenol-D 145 D.2 Spécifications des jauges de déformations HBM 1-XY11-1.5/120 . . . . 146
D.3 Spécifications du capteur de force Brûel & Kjaer de type 8200 147
1.1 Performances de divers générateurs électromagnétiques 14 1.2 Performances de divers générateurs piézoélectriques 16 1.3 Performances de divers générateurs électrostatiques 18 1.4 Performances de divers générateurs magnétostrictifs 20 1.5 Comparaison des différentes technologies de récupération d'énergie
vi-bratoire 22 2.1 Magnétostriction à saturation pour différents matériaux 33
2.2 Valeurs numériques de la zone comportementale utilisée 40 2.3 Propriétés piézoélectriques et magnétostrictives équivalentes du
Terfenol-D avec l'analogie 45 2.4 Analogie entre grandeurs piézoélectriques et grandeurs magnétostrictives 46
3.1 Valeurs numériques des dimensions du boitier calculées à l'annexe A . . 53 3.2 Valeurs numériques décrivant le bobinage et calculées à l'annexe A . . . 53
3.3 Valeurs numériques des excitations calculées à 1108 Hz 63 3.4 Éléments constitutifs de la modélisation Bond Graph 64 3.5 Valeurs numériques des propriétés des matériaux utilisés 68 3.6 Propriétés piézoélectriques et magnétostrictives équivalentes du
Terfenol-D avec l'analogie 69 3.7 Propriétés des composants de l'analyse par éléments finis 69
3.8 Résultats obtenus par les modèles Bond Graph et éléments finis en
com-paraison de ceux visés par la zone comportementale prévue à la section 2.3 77
4.1 Valeurs numériques calculées et fabriquées 89 4.2 Comparaison avec divers générateurs 111 4.3 Comparaison entre la modélisation par Bond Graph et le générateur réel
au point de fonctionnement théorique et pour la zone optimale réelle, le
tout en circuit ouvert 112 A.l Valeurs numériques calculées 125
A.2 Valeurs numériques décrivant le bobinage 126 A.3 Valeurs numériques de la masse suspendue 129
Introduction
1.1 Revue de littérature
De nos jours, les loisirs, l'information et la communication sont accessibles presque partout grâce aux appareils portables. Ces systèmes portables, tels que les baladeurs MP3, téléphones cellulaires, GPS, etc, sont ainsi utilisés au quotidien par nombre d'entre nous. Cependant, ces divers appareils ne possèdent encore que très rarement la carac-téristique la plus importante pour un système que l'on souhaite portable : l'autonomie complète. En effet, la plupart de ceux-ci fonctionnent grâce à l'apport d'énergie élec-trique provenant d'une pile chimique dont la réserve de puissance s'épuise au cours du temps, plus ou moins rapidement selon son utilisation. Roundy [25] a établi deux solutions possibles en vue d'atteindre l'autonomie complète des systèmes portables. La première possibilité consiste à concevoir des piles dont la réserve de puissance serait supérieure à la durée de vie de l'appareil alimenté. La figure 1.1 illustre l'évolution annuelle (year) de la densité de puissance des piles (battery energy density) en com-paraison de l'amélioration des caractéristiques essentielles de divers autres appareils (capacité des disques durs (disk capacity), vitesse de traitement des ordinateurs (CPU speed), mémoire RAM (available RAM) et vitesse de transfert des réseaux sans-fils (wi-reless transfer speed)). On constate que l'augmentation de la densité de puissance des piles stagne en comparaison des caractéristiques des autres technologies. La première solution avancée par Roundy devient alors difficilement réalisable à court terme.
La seconde possibilité exposée est la création de cette énergie électrique non pas par des piles, mais par des générateurs miniatures produisant cette énergie électrique à partir de divers types de sources. Roundy [25] a établi une liste exhaustive des diffé-rentes sources et technologies pouvant générer une énergie électrique. Il en ressort que l'énergie vibratoire, délivrée par les bâtiments, les personnes ou encore la quasi-totalité des machines que nous utilisons, est la meilleure voie à explorer afin d'auto-alimenter les systèmes portables. Dès lors, et même avant la publication de l'ouvrage de Roundy, de nombreux groupes de recherche ainsi que quelques entreprises se sont penchés sur le sujet, aboutissant même à des commercialisations de récupérateurs d'énergie
vibra-FIGURE 1.1 - Évolution de diverses technologies depuis 1990 [23]
toire [24].
Dans la documentation scientifique, les recherches effectuées sur des systèmes de récupération d'énergie vibratoire portent essentiellement sur quatre technologies. Cha-cune de ces technologies utilise un principe de conversion énergétique différent basé sur l'électromagnétisme, la piézoélectricité, l'électrostatique ou la magnétostriction.
Ce chapitre présente d'abord une revue de la documentation scientifique ayant pour objectif de décrire le fonctionnement de ces différents générateurs et présenter leurs performances, limites et avantages. Un bilan comparatif de ces technologies est constitué et l'intérêt de la magnétostriction est démontré. Le chapitre se termine par la description détaillée des objectifs de recherche ainsi que de la démarche utilisée pour les atteindre.
1.1.1 Technologie électromagnétique
Le concept de récupération électromagnétique est illustré par la figure 1.2 où le mouvement relatif d'une masse au sein d'un champ magnétique permanent, crée une tension électrique aux bornes d'un solénoïde. La tension électrique obtenue est propor-tionnelle à la vitesse relative de la masse, à l'intensité du champ magnétique permanent, au nombre de spires du solénoïde ainsi qu'à son rayon. La description du volume du générateur est donc importante car un système volumineux permet d'avoir un aimant permanent plus puissant, et donc un champ magnétique plus élevé, maximisant alors la tension induite. De même, un système volumineux peut accueillir un solénoïde de taille
plus imposante. La fréquence de l'excitation mécanique a aussi son importance car la vitesse relative et de fait la tension récupérée sera plus élevée à haute fréquence.
Ressort Solénoïde Masse ■; ^ Aimant F I G U R E 1.2 Générateur électromagnétique [2]
Le tableau 1.1 résume les recherches les plus pertinentes effectuées sur la récupéra tion d'énergie vibratoire par des générateurs électromagnétiques développés par divers groupes de recherche. Notons que Beeby [5] a effectué une revue détaillée de la documen tation scientifique pour les technologies présentées dans ce chapitre (électromagnétique, piézoélectrique, électrostatique et magnétostrictif), le lecteur peut s'y référer pour des informations complémentaires. Les données prises en compte dans le tableau 1.1 sont : la fréquence vibratoire à laquelle le système est excité, le volume total du générateur et la puissance maximale récupérée. Ces données vont permettre de classifier et comparer les générateurs issus des différentes technologies de récupération énergétique.
Beeby [6] a obtenu 45.8 p W en disposant des aimants à l'extrémité d'une poutre vibrante en flexion et à l'aide d'un solénoïde stationnaire, pour un volume total de 0.15 cm3. Grâce à cette même configuration, mais pour un volume 66 fois supérieur,
Saha [26] a réussi à générer 2000 pW, et par la suite 3200 p W en augmentant la fréquence de l'excitation. ElHami [9] a utilisé le même principe de fonctionnement et est parvenu à générer 530 p W pour une fréquence 6.2 fois plus élevée et un volume total 1.6 fois supérieur au générateur conçu par Beeby. Pour la même fréquence d'excitation que ElHami mais pour un volume 3.5 fois plus élevé, GlynneJones [11] a obtenu une puissance de 37 pW. GlynneJones [11] a ensuite installé un prototype sur le bloc moteur d'une voiture, et a récupéré 157 p W en 1.24 km de distance pour un signal de fréquence aléatoire. Pour un volume total de 32 cm3, soit le plus important des systèmes présentés
ici, Kulah [16] a abouti en une puissance de 0.12 p W par le biais d'un solénoide placé sur une poutre en flexion, les aimants étant stationnaires. Finalement, Serre [27] a obtenu 0.2 p W pour un volume de 0.6 cm3 grâce à une bobine stationnaire et à un aimant
TABLE 1.1 - Performances de divers générateurs électromagnétiques Référence Fréquence (Hz) Volume to-tal (cm3) Puissance (pW) Beeby, Southampton [6] 51.6 0.15 45.8 Saha, Cork [26] 13.1 10 2000 Saha, Cork [26] 84 10 3200 El-Hami, Southampton [9] 322 0.24 530 Glynne-Jones, Southampton [11] 322 0.84 37 Glynne-Jones, Southampton [11] Aléatoire 3.15 157 Kulah, University of Michigan [16] 64 32 0.12 Serre, Universitad de Barcelona [27] 360 0.6 0.2
La puissance volumique la plus élevée a été générée par le générateur de El-Hami. Cette puissance volumique de 2208 pW -cm~3 a été obtenue grâce à un volume faible, en
ce qui concerne la technologie électromagnétique, et une fréquence d'excitation parmi les plus élevées de la revue réalisée ici.
Les générateurs électromagnétiques présentent l'avantage d'avoir un fonctionnement bien maîtrisé et modélisé, ce qui en facilite la conception. En revanche, ces systèmes sont souvent volumineux en raison de la présence nécessaire de bobines ou d'aimants permettant de créer le champ magnétique permanent et de convertir la variation de champ magnétique en tension électrique.
1.1.2 Technologie piézoélectrique
Les matériaux piézoélectriques sont des matériaux présentant une interaction entre le domaine mécanique et le domaine électrique. Ce type de matériaux présente ainsi deux utilisations. Utilisé en actionneur, le piézoélectrique est soumis à une tension électrique, ou à un courant, et fournit un déplacement ou une force. Ce même piézoélectrique chargé mécaniquement par le biais d'un déplacement ou d'une force produit un courant électrique ou une tension électrique, c'est le mode senseur. C'est ce dernier mode qui est utilisé en récupération d'énergie vibratoire, la vibration mécanique produit ainsi une énergie électrique via le matériau piézoélectrique. Une des lois de comportement piézoélectrique est la suivante :
D = e S + esE
T = cES - e E (1.1)
Celle-ci couple le comportement mécanique réprésenté par le tenseur de contrainte T et le tenseur de déformation S, au domaine électrique décrit par le vecteur de champ
électrique appliqué E et le vecteur de déplacement électrique D . es est la matrice
diélectrique à déformation constante, 0E est la matrice de compliance à champ électrique
constant, et e est la matrice des coefficients piézoélectriques.
Dans le cas de l'utilisation d'un senseur piézoélectrique en circuit fermé, le vecteur champ électrique appliqué E est nul. La loi de comportement est alors réduite à la forme suivante :
D = e S
T = cB - (1-2) ES
Les charges électriques sont collectées par des électrodes placées sur les surfaces du piézoélectrique. La tension électrique produite est alors fonction de ces charges et de la capacitance du piézoélectrique.
Les matériaux piézoélectriques sont souvent fragiles et sont sensibles au vieillisse-ment. Il existe deux principaux types de céramiques piézoélectriques qui offrent chacun des caractéristiques propres [25]. Les céramiques de type PZT sont les plus présentes sur le plan commercial et ont un bon couplage piézoélectrique mais sont fragiles. Les PZN-PT possèdent un excellent couplage mais ne sont pas encore matures en raison d'un coût élevé et de leurs faibles dimensions. Il existe aussi des piézoélectriques de type PVDF qui présentent un comportement plus ductile que les céramiques PZT et PZN-PT mais pour un couplage inférieur.
Afin de parvenir à obtenir des contraintes élevées à des fréquences de l'ordre de la centaine de hertz, les matériaux piézoélectriques sont souvent utilisés en flexion. Une structure classique de générateur piézoélectrique, appelée bimorphe, se compose d'une poutre en alliage d'aluminium sur laquelle sont collées des céramiques piézoélectriques sur les faces supérieures et inférieures. On cherche souvent à avoir la même épaisseur sur chaque face de manière à obtenir un comportement symétrique, la fibre neutre de la poutre équipée de céramiques étant la même que celle de la poutre d'aluminium nue. La figure 1.3 illustre les différents types de connexions possibles. On désigne par polarisation parallèle la connexion consistant à relier des couches piézoélectriques pola-risées dans le même sens de façon à additionner les courants électriques. La polarisation en série consiste, en revanche, à additionner les tensions en reliant les couches polarisées dans des directions opposées.
Un piézoélectrique utilisé en flexion fonctionne en un mode dit 31, c'est à dire que la contrainte varie suivant l'axe 3 (l'axe suivant l'épaisseur de la céramique) mais les charges électriques sont recueillies suivant l'axe 1 (l'axe longitudinal de la céramique).
De la même façon que pour la génération électromagnétique, le tableau 1.1 résume les performances de quelques générateurs piézoélectriques provenant de la documentation scientifique. Ces générateurs utilisent différentes topologies géométriques. Roundy [25], Badel [4] et Ottman [21] ont utilisé la configuration classique de céramiques piézoélec-triques collées sur une poutre en flexion. Roundy [25] est parvenu à générer 365 pW
/ ^ F ^ \ + *»
1
î f p1
y
____~__ys J +Polarisation en série Polarisation parallèle
FIGURE 1.3 - Types de polarisation pour une poutre bimorphe en flexion
à 60 Hz et pour un volume de 1 cm3, puis 1700 \iW pour un volume 5 fois supérieur
et une fréquence plus faible de 40 Hz. Badel [4] a obtenu 12000 pW pour une fré-quence presque égale à celle du second générateur de Roundy, mais pour un volume 3 fois plus élevé. Ottman [21] est parvenu à récupérer 18000 pW pour un volume 10 fois inférieur à celui de Badel. Wang [34] et Kim [15] ont utilisé des dispositifs de disques piézoélectriques précontraints mécaniquement et ont abouti en des puissances récupé-rées de respectivement 11000 pW et 52000 pW pour des volumes de même ordre de grandeur que les générateurs précédents mais des fréquences d'excitation supérieures. Finalement, Choi [8] est parvenu à générer 1.01 pW par le biais de poutres à l'échelle microcospique utilisées en flexion en mode 33 à une fréquence de 13.9 kHz.
TABLE 1.2 - Performances de divers générateurs piézoélectriques
Référence Fréquence (Hz) Volume (cm3) Puissance (pW) Roundy, Berkeley [25] 60 1 365 Roundy, Berkeley [25] 40 5 1700
Badel, INSA Lyon [4] 35 15 12000
Ottman, Johns Hopkins University [21] 53.8 1.5 18000 Wang,Hong-Kong Polytechnic University [34] 600 0.6 11000 Kim, Pennsylvannia State University [15] 100 1.2 52000
Choi, Corée [8] 13970 4.42 x IO"7 1.01
La puissance volumique la plus élevée est générée par le générateur de Choi [8]. Cette puissance volumique de 2.2 x 106 pW-cm~3 est obtenue grâce à un volume extrêmement
faible. Pour des volumes plus usuels, la puissance volumique maximale est obtenue par le générateur de Kim [15]. Cette puissance volumique de 43300 pW-cm"3 est 20 fois plus
élevée que la puissance volumique maximale issue des générateurs électromagnétiques présentés précédemment.
La conversion mécano-électrique est une composante intrinsèque des matériaux pié-zoélectriques, ainsi, les générateurs fonctionnant sur ce principe sont souvent bien plus compacts et efficaces que les générateurs électromagnétiques. En revanche, les céra-miques piézoélectriques sont fragiles et par conséquent, ne peuvent pas être soumises à des chargements mécaniques élevés.
1.1.3 Technologie électrostatique
La figure 1.4 illustre le concept de récupération électrostatique. Ce type de conver-sion génère une énergie électrique par le biais d'une capacitance variant en fonction de la distance entre deux plaques chargées électriquement, le tout baignant dans un milieu diélectrique. Dans le cas qui nous intéresse, cette variation de distance est due à une vibration mécanique. Milieu diélectrique Variation de distance Plaques chargées électriquement
FIGURE 1.4 - Schéma de principe de conversion électrostatique
Les recherches basées sur ce principe utilisent beaucoup la micro-machinerie et re-posent essentiellement sur trois types de structures [25], telles qu'illustrées à la figure 1.5. La structure "in-plane overlap" utilise la variation de surface projetée entre les doigts en mouvement et ceux statiques, la structure "in-plane gap closing" fait varier la capa-citance en changeant la distance entre les doigts en mouvement et ceux statiques, et la dernière, la structure "out-of-plane gap closing" utilise l'évolution de la distance entre deux larges plaques chargées.
L'inconvénient principal de cette méthode de récupération réside dans le fait qu'il est nécessaire d'avoir une source d'alimentation extérieure pour charger initialement les plaques. De plus, l'amplitude du mouvement vibratoire doit être parfaitement maîtrisée pour éviter un éventuel court-circuit provoqué par le contact des deux plaques.
Le tableau 1.3 récapitule les performances des générateurs électrostatiques les plus pertinents trouvés dans la littérature. Arakawa [3] a obtenu 6 pW d'une structure "
in-Inplane overlap Inplane gap closing
Outofplane gap
FIGURE 1.5 Trois types de structures possibles pour un générateur électrostatique en micromachinerie [25]
plane overlap" de 0.95 cm3 à une fréquence de 10 Hz. Le générateur conçu par Roundy
a quand à lui généré 0.337/il47 par le biais d'une structure "in plane gap closing" de
volume 0.054 cm3 à une fréquence d'excitation de 120 Hz. Pour un volume presque
identique et une fréquence supérieure, la structure "outofplane gap closing" de Para cha [22] a généré 1.85 pW. En utilisant le même type de générateur que Paracha, Ma [18] a obtenu 0.065 pW, ceci pour un système bien plus compact et pour une fréquence de 4.2 kHz.
TABLE 1.3 Performances de divers générateurs électrostatiques Référence Fréquence (Hz) Volume (cm3) P u i s s a n c e (pW) Arakawa, Tokyo University [3] 10 0.95 6
Roundy, Berkeley [25] 120 0.054 0.337 Paracha, ESIEEESYCOM [22] 290 0.064 1.85 Ma, HongKong University [18] 4200 67 x IO"6 0.065
Le générateur électrostatique possédant la puissance volumique maximale est le système de Ma [18]. Cette puissance volumique de 970 p W ■ cm~3 est néanmoins très
inférieure à celle obtenue par les générateurs de technologie piézoélectrique.
Les récupérateurs électrostatiques présentent l'avantage d'être facilement miniatu-risables. Cependant, cet avantage est aussi un inconvénient car il n'existe pas, à la connaissance de l'auteur, de générateur électrostatique de volume supérieur au cm3, les
puissances électriques produites sont alors toujours faibles.
1.1.4 Technologie magnétostrictive
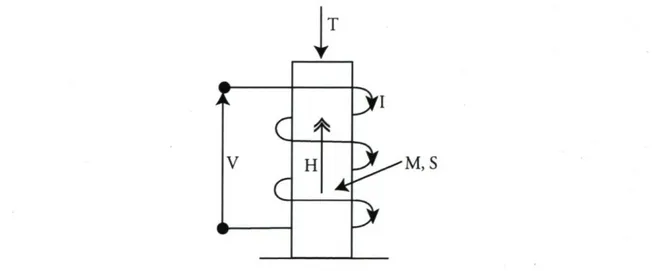
Les matériaux magnétostrictifs sont des matériaux qui couplent le domaine méca-nique au domaine magnétique. La figure 1.6 illustre le principe de récupération d'éner-gie vibratoire par magnétostriction. Un mouvement vibratoire engendre une variation de la contrainte T et de la déformation S au sein du matériau magnétostrictif. Afin d'augmenter le couplage du matériau, on excite celui-ci par une excitation magné-tique continue H, cette excitation peut provenir d'une bobine ou d'aimants permanents. La variation de l'état mécanique du matériau magnétostrictif aboutit, via le couplage mécano-magnétique, en une variation de la magnétisation M du matériau. On peut alors convertir cette variation de magnétisation en tension électrique V par le biais d'une bobine entourant le barreau magnétostrictif.
M, S
FIGURE 1.6 - Principe de fonctionnement d'un générateur magnétostrictif
Les matériaux magnétostrictifs, comme les matériaux piézoélectriques étudiés pré-cédemment, présentent un couplage entre des domaines différents. Pour cette raison, les lois de comportement de ces matériaux sont très similaires. Le système d'équations suivant présente une forme linéaire de la loi de comportement pour un élément magné-tostrictif :
{
S = sHT y d HB = d T + nTH (1.3)
Ce système d'équations lie le tenseur de déformation S, le tenseur de contrainte mécanique T, au vecteur champ magnétique B et au vecteur d'excitation magnétique H . Les caractéristiques magnétostrictives utilisées par cette loi de comportement sont la matrice de compliance mécanique à excitation magnétique constante sH, la matrice
de perméabilité du matériau à contrainte constante //T, et la matrice des coefficients
piézomagnétiques d. Le terme piézomagnétique démontre bien la similitude entre les effets magnétostrictifs et les effets piézoélectriques.
Deux technologies sont à l'étude à l'heure actuelle, celles-ci diffèrent du point de vue du matériel magnétostrictif utilisé. La première utilise des contraintes de traction-compression sur un barreau magnétostrictif [35] telles que présentées sur la figure 1.6. La seconde utilise la flexion d'un film magnétostrictif collé sur une poutre en flexion [33] à la manière d'une céramique piézoélectrique.
Dans les deux cas, un solénoïde entoure les éléments magnétostrictifs afin de conver-tir le champ magnétique en tension électrique. Comme il a été annoncé pour les pié-zoélectriques, l'utilisation d'une fréquence de résonance basse est le principal avantage de la structure en flexion par rapport à la structure en traction-compression qui utilise une fréquence de résonance plus élevée.
La technologie magnétostrictive étant la plus novatrice des quatre technologies pré-sentées dans ce chapitre, on trouve peu de recherches abouties portant sur la récupéra-tion d'énergie vibratoire. Néanmoins quelques groupes de recherche se sont penchés sur la magnétostriction comme il est montré dans le tableau 1.4. Ainsi Wang [33] a obtenu 200 pW à 58 Hz avec un film magnétostrictif Metglas en flexion pour un volume total de 0.95 cm3. Berbyuk [7] a réussi à convertir 242 W à une fréquence de 1000 Hz en
im-posant une contrainte dynamique à un barreau magnétostrictif de Terfenol-D. Zhao [35] est parvenu à modéliser une récupération de 400 x IO6 pW par le biais d'un barreau en
traction-compression dont la déformation est contrôlée à une fréquence de 1 kHz. TABLE 1.4 - Performances de divers générateurs magnétostrictifs
Référence Fréquence (Hz) Volume (cm3) Puissance (pW) Wang, North Carolina [33] 58 0.95 200 Berbyuk, Chalmers University, [7] 1000 8.8 242 x IO6
Zhao, University of Salford, [35] 1000 36.3 17 x IO6
Le système générant la puissance volumique maximale est le convertisseur de Ber-byuk, sa puissance volumique est de 27.5xlO6 pW • cm~3, ce qui est supérieur aux
générateurs issus des technologies précédentes. Néanmoins, ce système n'est pas réel lement un récupérateur d'énergie vibratoire car la contrainte à laquelle est soumis le matériau est contrôlée de façon externe. Malgré cela, ce convertisseur démontre le po tentiel élevé de conversion énergétique des matériaux magnétostrictifs.
Le principal avantage de la technologie magnétostrictive est le fort coefficient de couplage permettant de générer de fortes puissances électriques. Cependant, comme la technologie électromécanique, la présence d'aimants ou de bobines résulte en des générateurs volumineux.
1.1.5 Systèmes commercialisés
Quelques entreprises commercialisent à l'heure actuelle des générateurs électriques permettant de récupérer l'énergie vibratoire [24]. Les deux seules technologies com mercialisées sont les technologies électromagnétiques, via les entreprises Perpetuum et Ferro Solutions, et piézoélectriques via Cédrat et MIDE. Ces appareils, dont les volumes s'échelonnent de 30 à 130 cm3, produisent des puissances maximales allant jusqu'à la
centaine de m W pour les générateurs de Cédrat. La densité de puissance d'un des gé nérateurs commercialisé par Cédrat est de 2700 p W ■ cm~3. À titre de comparaison, la
puissance issue de ce générateur permet de faire fonctionner en continu le laser d'un lecteur de disque compact.
1.1.6 En résumé
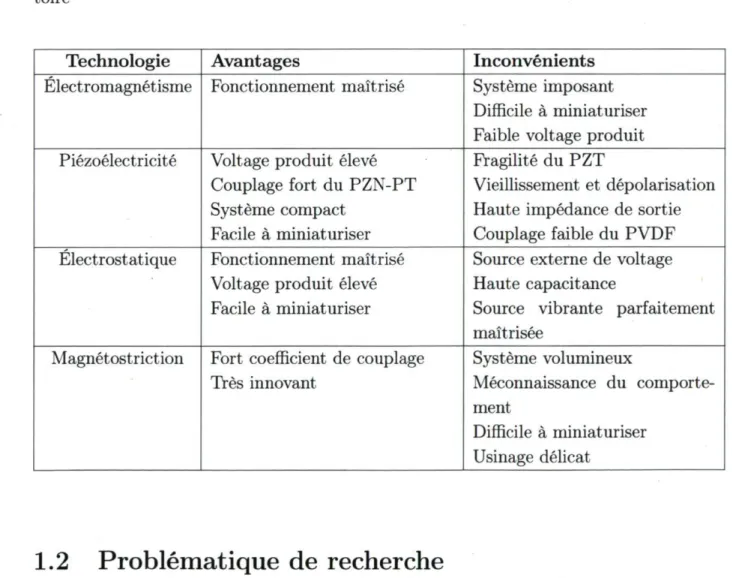
Le tableau 1.5 présente un sommaire des avantages et inconvénients pour les quatre technologies présentées dans cette section.
La technologie électromagnétique présente l'avantage d'avoir un fonctionnement bien maîtrisé par les lois physiques. En revanche, ce type de système génère des amplitudes de voltage faibles. De plus, la présence obligatoire d'aimants ou de solénoïdes pour produire et convertir le champ magnétique résulte en un générateur de taille imposante et difficile à miniaturiser.
La piézoélectricité est une conversion énergétique intrinsèque au matériau, ceci abou tit alors souvent en des générateurs de faibles tailles et faciles à miniaturiser. Les voltages issus de ces système sont souvent élevés, dépendamment du matériau piézoélectrique utilisé. Cependant, ce type de matériau peut se dépolariser au cours de leur utilisation sur une grande période (des années), l'efficacité du piézoélectrique diminue alors. De plus, la haute impédance du matériau nécessite un circuit électrique adapté.
La technologie électrostatique présente un fonctionnement bien maîtrisé et les vol tages générés par ces systèmes sont souvent élevés. De plus, le fait de ne pas nécessiter d'aimants ni de solénoïdes aboutit en un générateur facile à miniaturiser. Néanmoins, cet avantage est aussi un défaut car cette technologie est difficilement applicable pour des dimensions plus élevées, par conséquent les puissances électriques obtenues demeurent
faibles. Aussi, la source de vibration d'un générateur électrostatique doit être parfai-tement connue, ou limitée par des butées mécaniques, de manière à ne pas provoquer de courts-circuits entre les plaques chargées. De plus, ce type de système nécessite une source de tension initiale afin de charger électriquement les plaques.
Pour les mêmes raisons que la technologie électromagnétique, les générateurs ma-gnétostrictifs sont volumineux à cause de la présence d'aimants et de bobines. Ils sont alors difficiles à miniaturiser. De plus, l'usinage des matériaux magnétostrictifs est dé-licat parce que ceux-ci sont souvent fabriqués par frittage (métallurgie des poudres). Par contre, ceux-ci sont particulièrement novateurs et ont un fort coefficient de cou-plage piézomagnétique permettant de générer des puissances électriques élevées. Bien que le système peut être volumineux, il existe un intérêt réel à mieux comprendre la récupération d'énergie vibratoire par magnétostriction.
TABLE 1.5 - Comparaison des différentes technologies de récupération d'énergie
vibra-toire
Technologie Avantages Inconvénients
Electromagnétisme Fonctionnement maîtrisé Système imposant Difficile à miniaturiser Faible voltage produit Piézoélectricité Voltage produit élevé
Couplage fort du PZN-PT Système compact
Facile à miniaturiser
Fragilité du PZT
Vieillissement et dépolarisation Haute impédance de sortie Couplage faible du PVDF Electrostatique Fonctionnement maîtrisé
Voltage produit élevé Facile à miniaturiser
Source externe de voltage Haute capacitance
Source vibrante parfaitement maîtrisée
Magnétostriction Fort coefficient de couplage Très innovant Système volumineux Méconnaissance du comporte-ment Difficile à miniaturiser Usinage délicat
1.2 Problématique de recherche
L'intérêt des groupes de recherche et des industriels est croissant en ce qui concerne l'autonomie des systèmes portables. L'amélioration des piles ne constituant pas une
solution envisageable à court terme, des groupes de recherche se sont alors mis à étu-dier la conception de générateurs miniatures. De nombreuses sources potentielles ont été étudiées en vue d'alimenter ces générateurs, parmi ces sources se détache l'éner-gie vibratoire [25]. Quatre procédés sont actuellement étudiés afin de convertir cette énergie vibratoire en énergie électrique : l'électromagnétisme, la piézoélectricité, l'élec-trostatisme et la magnétostriction. Ces différentes technologies ne sont cependant pas au même niveau de maturité. En effet, des générateurs piézoélectriques et électroma-gnétiques sont déjà commercialisés alors que très peu d'études sont effectuées sur la récupération d'énergie vibratoire par magnétostriction. Ainsi, malgré le fait que les ma-tériaux magnétostrictifs présentent un fort couplage et que les puissances générées sont élevées (voir tableau 1.4), nous ne sommes pas en mesure de savoir si la technologie magnétostrictive est intéressante du point de vue de la récupération d'énergie vibra-toire. Les présents travaux de recherche visent à combler ce manque et ainsi statuer sur l'utilisation de la magnétostriction dans un contexte de récupération de l'énergie issue des vibrations.
1.3 Objectifs de recherche
L'objectif principal de ce travail de recherche est la conception et l'étude d'un géné-rateur de récupération d'énergie vibratoire utilisant la magnétostriction. Étant donné que cette voie de récupération énergétique est très innovante, la démarche de l'étude se veut tout d'abord exploratoire et non dédiée à l'optimisation d'un générateur ou à l'obtention d'un produit fini. Les objectifs spécifiques sont les suivants :
- la recherche et l'analyse d'une zone magnétostrictive optimale afin de récupérer le maximum de puissance ;
- la conception d'un récupérateur permettant d'utiliser le matériau magnétostrictif dans la configuration prévue par l'objectif précédent ;
- la modélisation du récupérateur prenant en compte son aspect multi-domaine (magnétisme, électricité, mécanique) ;
- l'expérimentation d'un récupérateur réel et la comparaison des résultats expéri-mentaux avec ceux issus de la modélisation ;
- l'étude expérimentale du maximum de puissance générée et la comparaison avec les récupérateurs issus de la documentation scientifique.
1.4 Présentation du mémoire
L'organisation du mémoire est la suivante :
Chapitre 2 : É t u d e du phénomène magnétostrictif et modélisation linéaire Le chapitre 2 a pour but de présenter les matériaux magnétostrictifs sous forme
théorique. Les différents effets magnétostrictifs sont abordés et les équations de com-portement sont présentées. Le cas d'un barreau magnétostrictif en contrainte uniaxiale est développé et les courbes de comportement pour un tel chargement sont introduites. L'étude de ces courbes expérimentales permet de délimiter une zone de fonctionnement efficace sur laquelle est ensuite appuyée la conception du générateur. Cette zone com-portementale étant linéaire, une modélisation par Bond Graph ainsi qu'une analogie piézoélectrique sont ensuite introduites en vue de modéliser le matériau magnétostrictif au chapitre suivant.
C h a p i t r e 3 : Conception du générateur et performances a t t e n d u e s Le chapitre 3 présente la conception d'un générateur magnétostrictif basé sur l'uti-lisation de la zone décrite au chapitre précédent. La configuration du système, les pa-ramètres d'optimisation, ainsi que les hypothèses ayant menés à cette configuration sont décrits. Une modélisation mécanique classique du générateur permet de valider la conception ainsi que de calculer la force requise afin d'exciter mécaniquement le récu-pérateur. En raison de sa multidisciplinarité, la modélisation Bond Graph est utilisée en vue de constituer un modèle du générateur. Ainsi, un modèle Bond Graph, prenant en compte les domaines mécanique, magnétique et électrique du générateur en circuit ouvert, est introduit. Afin de valider ce modèle, on utilise l'analogie développée au chapitre 2 entre les matériaux magnétostrictifs et les matériaux piézoélectriques pour modéliser le générateur par éléments finis. Finalement, les performances du récupéra-teur magnétostrictif sont étudiées avec le modèle Bond Graph en circuit fermé avec une résistance électrique optimale.
Chapitre 4 : É t u d e expérimentale
Une étude expérimentale est présentée au chapitre 4. Le système expérimental ré-gissant les tests, ainsi que les données du générateur usiné selon la conception effectuée au chapitre 3, sont décrits. Le générateur magnétostrictif est alors testé au point de fonctionnement prévu par les modélisations afin de valider le modèle. Des essais de sensibilité magnétique et de sensibilité mécanique sont ensuite effectués dans le but d'accéder au point d'opération optimal pratique. Les mesures effectuées avec le récupé-rateur en circuit ouvert sont analysées et comparées à celles prévues par la modélisation. Finalement, les performances du générateur en circuit fermé par une charge électrique résistive sont étudiées et comparées aux performances de générateurs de différentes technologies issus de la documentation scientifique.
C h a p i t r e 5 : Conclusion
Une conclusion présente les points les plus pertinents des présents travaux et réalise une ouverture sur des recherches futures sur le sujet.
Etude du phénomène magnétostrictif
et modélisation linéaire
2.1 Introduction
Un matériau magnétostrictif est un matériau qui, comme il a été décrit au chapitre 1, présente une interaction entre son comportement magnétique et son comportement mé-canique. Il peut ainsi se déformer sous l'action d'un champ magnétique et inversement. Tous les matériaux ferromagnétiques sont magnétostrictifs, cependant cette magné-tostriction est très faible et donc peu utile. Cependant, depuis quelques années, de nouveaux alliages ont été développés et ceux-ci présentent une magnétostriction que l'on désigne souvent comme géante. L'objectif de ce chapitre est de présenter le phéno-mène magnétostrictif en vue de concevoir un système récupérateur d'énergie vibratoire utilisant cette magnétostriction géante.
Ce chapitre présente tout d'abord la théorie du comportement magnétostrictif et l'étude des courbes expérimentales décrivant ce phénomène dans le but d'utiliser la zone la plus efficace en vue de concevoir un système récupérateur d'énergie. Afin de prédire les performances d'un tel générateur de manière analytique, on s'intéresse ensuite à la modélisation des matériaux magnétostrictifs en utilisant la méthode Bond-Graph. Une analogie avec les matériaux piézoélectriques est finalement présentée pour fins de validation. Cette analogie sera utilisée au chapitre 3.
2.2 Théorie du comportement magnétostrictif
Cette section introduit la théorie de la magnétostriction de manière exhaustive, en présentant les différents effets magnétostrictifs, ainsi que les mécanismes causant ce phénomène. Les lois de comportement magnétostrictives sont ensuite abordées et une description des matériaux magnétostrictifs est réalisée. Pour plus de renseignements le lecteur peut se référencer au livre de Gôran Engdahl [10].
2.2.1 Différents effets magnétostrictifs
Historiquement, le premier phénomène magnétostrictif fut découvert par Joule en 1842, il a observé qu'un barreau de fer s'allongeait lorsqu'il le soumettait à un champ magnétique axial et se comprimait lorsque le champ était transversal. Par la suite, de nombreux autres phénomènes, dont les effets Villari, Wiedemann, Mateucci, l'effet de variation de volume, l'effet Nagao-ka-Honda et l'effet de variation de module d'Young, ont été mis en exergue [31, 32]. A la manière des matériaux piézoélectriques, on peut dissocier les effets directs, une variation de champ magnétique fait apparaître un chan-gement de comportement mécanique, et les effets indirects, une variation mécanique gé-nère un changement de comportement magnétique. Les effets directs sont utilisés dans les actionneurs tels que pour le contrôle vibratoire, la production d'ultrason, les moteurs linéaires... En revanche, mis à part les sonars, les effets indirects ne sont presque pas utilisés dans un contexte vibratoire. Quelques recherches étudient néanmoins la concep-tion de générateurs ou de transformateurs magnétostrictifs [35, 32, 7]. Les différents effets magnétostrictifs sont détaillés ci-dessous.
Effet Joule
Cet effet désigne l'allongement ou raccourcissement d'un barreau ferromagnétique sous l'action d'un champ magnétique (effet direct). La figure 2.1 illustre un barreau ferromagnétique placé au coeur d'un solénoïde parcouru par un courant électrique /. Ce courant crée une excitation magnétique H, dans la direction longitudinale du bar-reau, venant déformer celui-ci. La contraction ou l'allongement du barreau dépend de la direction du champ magnétique et du signe du coefficient de magnétostriction. Le coefficient de magnétostriction traduit le comportement du matériau ferromagnétique lorsqu'il est excité par un champ magnétique axial. Ainsi, un coefficient positif est synonyme d'allongement tandis qu'un coefficient négatif désigne une contraction. Cet effet est utilisé dans les sonars, les capteurs de position sans contact ainsi que pour la production d'ultrason.
Effet Villari
L'effet Villari est l'effet indirect de l'effet Joule, un barreau soumis à une modification de longueur s'aimante. On peut par la suite utiliser un solénoïde disposé autour de ce barreau pour induire une tension et produire un courant électrique via la loi de Lenz Faraday. L'effet Villari est utilisé pour la réception d'ultrason et la réception d'échos de sonar.
r*\ Q A
« r H
U O
FIGURE 2.1 - Effet Joule
Effet W i e d e m a n n
L'effet Wiedemann se produit lorsqu'un barreau de matériau magnétostrictif est parcouru axialement par un courant électrique tel qu'illustré par la figure 2.2. Ce courant I produit un champ magnétique B circulaire dans le plan perpendiculaire au barreau, les dipôles magnétiques vont alors avoir tendance à s'aligner sur ce champ, ce qui a pour effet de générer une torsion du barreau.
.Dipôle magnétique
FIGURE 2.2 - Effet Wiedemann
Effet Mateucci
L'effet Mateucci est l'effet indirect de l'effet Wiedemann : une torsion du barreau magnétostrictif engendre un champ magnétique circulaire dans le plan perpendiculaire au barreau et génère un courant électrique au sein de ce barreau.
Effet de variation de volume
Cet effet traduit la variation de volume d'un barreau magnétostrictif sous l'action d'un champ magnétique. Cette variation est linéaire en fonction du champ magné-tique appliqué mais reste faible pour la plupart des métaux et alliages magnétostrictifs courants. Cependant, il peut devenir relativement important pour des alliages dont la température est proche de la température de Curie, température à partir de laquelle l'alliage perd ses propriétés magnétiques.
Effet Nagao-ka-Honda
L'effet Nagao-ka-Honda est l'effet indirect de l'effet de variation de volume : un changement de volume apporté au matériau ferromagnétique se traduit par la création d'un champ magnétique.
Effet de variation du module d'Young
Il a été dit précédemment que lorsqu'un barreau ferromagnétique est soumis à une déformation celui-ci s'aimante, c'est ce qu'on appelle l'effet Villari. Lorsque ce même barreau est soumis à un champ magnétique il s'expand suivant la direction du champ par le biais de l'effet Joule. Ainsi, en appliquant une contrainte à un matériau ma-gnétostrictif, une aimantation se crée et aboutit en une déformation supplémentaire à la déformation purement élastique, cet effet se traduit en un changement du module d'Young.
Dans un contexte de récupération d'énergie vibratoire, on souhaite convertir l'éner-gie mécanique en énerl'éner-gie magnétique, ce sont donc les effets indirects (effets Villari, Mateucci et Nagao-ka-Honda) qui sont utilisés.
2.2.2 Mécanismes magnétostrictifs
Un matériau magnétostrictif est composé de domaines magnétiques, appelés aussi dipôles magnétiques, qui s'orientent différemment suivant le champ magnétique ou la contrainte appliquée. La figure 2.3 illustre la chronologie de la première magnétisa-tion au niveau de la structure cristallographique. Avant sa première magnétisamagnétisa-tion, le matériau est magnétiquement neutre comme le montre l'état 0. L'application d'une ex-citation magnétique H vient perturber l'orientation des cristaux. Cette perturbation, illustrée par l'état I, est appelée mouvement de paroi. À mesure que l'intensité de l'ex-citation magnétique augmente, les cristaux tendent à s'orienter dans la direction de cette excitation. Cette rotation des domaines magnétiques est illustrée par l'état II. En augmentant encore l'intensité de H on atteint la saturation magnétique du matériau, puis on entre dans la zone de magnétostriction forcée comme le montre l'état III.
0 II III
F I G U R E 2.3 - Processus de première aimantation [13]
Lorsqu'un matériau est soumis à une excitation magnétique H, celui-ci se magné-tise. On désigne par M la magnétisation acquise par le matériau. La magnétisation M est différente dépendamment du matériau utilisé. Cette capacité à se magnétiser est traduite par le coefficient de perméabilité magnétique relative pT par rapport à l'air.
Mathématiquement, on a :
M = (flr - 1) H (2.1) Ainsi, un matériau à perméabilité relative supérieure à 1 a tendance à concentrer les
lignes de champ et ainsi s'aimanter. Au contraire, un matériau à perméabilité relative inférieure à 1 fait fuir les lignes de champ.
On définit la magnétostriction A comme étant la déformation d'un matériau due à une action magnétique sur celui-ci. La figure 2.4 montre (a) l'évolution de la magnétisa-tion M et (b) l'évolumagnétisa-tion de la magnétostricmagnétisa-tion À en foncmagnétisa-tion de l'excitamagnétisa-tion magnétique H lors de la première aimantation du matériau. Les états 0, I, II et III de la figure 2.3 y sont répertoriés. On peut remarquer que M et A augmentent lentement lors de la zone I de mouvement de paroi. Puis la rotation des domaines magnétiques facilite la magnétisation et la magnétostriction comme on peut le voir dans l'état II. Une fois atteint l'état III de magnétostriction forcée, le matériau est à saturation magnétique et A et M stagnent.
À la suite de cette première aimantation le matériau conserve son orientation cris-tallographique de l'état I, cette magnétisation résiduelle est appelée magnétisation ré-manente.
De façon similaire à un élément piézoélectrique, les matériaux magnétostrictifs pré-sentent un axe d'aimantation facile sur lequel l'effet magnétostrictif (déformation pour un champ magnétique donné) est maximisé. Pour cette raison, on représente souvent les
Saturation matérielle Excitation magnétique H (a) /.s C c O O t__ rt 0 / Saturation matérielle T " ^ Magnétostriction forcée 1
I \j
V i II III Excitation magnétique H (b)F I G U R E 2.4 Évolutions (a) de la magnétisation M et (b) de la magnétostriction A en
fonction de l'excitation magnétique H lors de la première aimantation du matériau dipôles magnétiques par des ellipses, comme le montre la figure 2.5, et non pas par des cercles, ceci afin de prendre en compte l'axe d'aimantation facile. Prenons le cas d'un matériau magnétostrictif de coefficient magnétostrictif positif, qui, après sa première aimantation, est à l'état libre décrit par la figure 2.5(a). L'application d'une excitation magnétique H de direction parallèle à son axe facile d'aimantation oriente les dipôles magnétiques dans la même direction, ce qui allonge le matériau comme illustré par la figure 2.5(b). En revanche, une excitation H tendant vers la direction transversale aura tendance à comprimer le matériau comme l'indique la figure 2.5(c).
2.2.3 Lois du comportement magnétostrictif
Étant donné l'interaction entre les domaines mécaniques et magnétiques, la loi de comportement des matériaux magnétostrictifs présente un couplage entre ces deux do maines. En supposant un comportement linéaire, on obtient la loi de comportement suivante [10] :
S = sHT + d H
B = d ' T y f iTH
(2.2)
où S représente le tenseur des déformations en m ■ m l, T le tenseur des contraintes mécaniques en Pascal (Pa), B le vecteur de champ magnétique total en Tesla ( T )l et
1. En raison de la possible confusion entre la contrainte T et l'unité T (Tesla) du champ magnétique, nous préciserons Tesla lorsqu'une telle confusion est possible.
Extension (b)
Compression (c)l
FIGURE 2.5 Dipôles magnétiques (a) à l'état libre, (b) en extension lorsqu'une exci tation H est appliquée suivant la direction d'aimantation facile et (c) en compression lorsque l'excitation magnétique H est transversale à la direction d'aimantation facile, cela dans le cas d'un coefficient magnétostrictif positif
H le vecteur d'excitation magnétique appliquée en A ■ m 1. Le vecteur B est similaire
à la magnétisation M et est défini dans le prochain paragraphe. On désigne par sH
la compliance mécanique à excitation magnétique constante en Pa~x, cette compliance
est liée au module d'Young E par la relation 2.3.
E (2.3)
/xT symbolise la perméabilité magnétique du matériau à contrainte constante en
Hm~l (H : Henry), d et d'les matrices des coefficients piézomagnétiques en m_4_1, qui,
si on considère comme hypothèse que le matériau présente une réversibilité totale [10], sont respectivement égales à d et à sa transposée d*.
On rappelle cidessous les relations les plus importantes qui relient les diverses gran deurs du domaine magnétique : l'excitation magnétique H, le champ magnétique B et la magnétisation M. Le coefficient p0 représente la perméabilité magnétique de l'air
i
B =
no(H
+ M)
B = PoPrH B = - ^ M Vr ~ 1 (2-4) (2.5) Ax<F I G U R E 2.6 - Définition des directions longitudinales et transversales d'un barreau
magnétostrictif
La figure 2.6 illustre les directions longitudinales (x3) et transversales (_c1; a.2)d'un
barreau de matériau magnétostrictif. Pour un tel matériau au comportement symétrique et orthotrope, polarisé dans la direction £3, les matrices constitutives présentent les
formes suivantes [10] : M d = '11 '12 0 0 0 0 dis 0 '12 M 0H '11 .// _,// '13 0 0 0 '1.3 0 0 0 0 0 0 dis 0 0 MJ T 0 0 r x H &13 „/f ' 1 3 r x H &33 0 0 0 d.31 0 0 0 0 T rL22 0 0 0 J H '44 0 0 0 0 T ^ 3 3 0 0 0 0 i>44 0 0 ' 0 0 0 0 (2.6)
Il est à noter que les équations de comportement précédentes ne prennent pas en compte les effets thermiques, en effet, une dilatation thermique conduit à une déforma-tion de l'échantillon et donc à la créadéforma-tion d'un champ magnétique. Dans le cadre de cette étude, les expériences menées en laboratoire sont réalisées à température ambiante, les effets thermiques ne sont donc pas pris en compte.
2.2.4 Matériaux magnétostrictifs
Les matériaux n'ayant pas tous les mêmes propriétés cristallographiques, ils n'ont pas tous les mêmes capacités magnétostrictives. Le tableau 2.1 présente les déformations à saturation magnétique de différents matériaux suivant leurs axes faciles d'aimantation, aussi appelées coefficients de magnétostriction à saturation [31].
TABLE 2.1 - Magnétostriction à saturation pour différents matériaux
Matériau Magnétostriction à saturation (en pe)
Métaux Fer Nickel Cobalt - 9 - 3 3 - 6 2 Ferrites Fe304 CoFe204 + 40 - 110 Composés de terres rares et de fer
TbFe2
SmFe2
Tbo,3Dy0,7Fe2 (Terfenol-D)
Metglas 2605SC
+ 1753 - 1560 + 1068
+ 40
Comme on peut le voir, les composés de terres rares présentent une magnétostriction importante en comparaison des autres matériaux, ces composés sont donc désignés comme des matériaux fortement magnétostrictifs ou à magnétostriction géante. Ce type de matériau est souvent issu de la métallurgie des poudres, aussi appelé frittage. Ce sont donc des matériaux fragiles résistant mal à la tension. Par exemple, le Terfenol-D
(Tb0,3Dy0,7Fe2) produit par Etrema possède une résistance en compression d'environ
700 M P a en comparaison d'une résistance en tension de 30 M P a [10]. Les signes positif et négatif des magnétostrictions à saturation illustrent les sens des déformations des alliages lorsque ceux-ci sont saturés magnétiquement suivant leurs axes d'aimantation facile. Ainsi, à saturation magnétique, l'alliage SmFe2 se raccourcit de 1560 pe alors
Sur le plan commercial, les matériaux magnétostrictifs les plus courants sont le Terfenol-D et le Metglas, on retrouve ces deux matériaux dans le tableau 2.1. La com-pagnie Etrema commercialise le Terfenol-D sous la forme de poudre métallique, de barres de sections circulaires ou carrées et mêmes de plaques, alors que Metglas se concentre sur des films de faibles épaisseurs fabriqués par vaporisation de poudre d'al-liages magnétostrictifs. Dans le cadre de notre application c'est le Terfenol-D qui est utilisé.
2.3 Courbes comportementales expérimentales
En pratique, le comportement magnétostrictif est non linéaire et très peu de re-cherches ont été réalisées pour caractériser expérimentalement le Terfenol-D en régime dynamique. Les seules travaux concernent Kellogg [13] qui étudie les boucles mineures au sein des cycles d'hystérésis pour des contraintes variant à une fréquence de 4 Hz. Ces données ont été utilisées pour concevoir le dispositif de récupération d'énergie vi-bratoire. Le dispositif expérimental utilisé par Kellogg est illustré par la figure 2.7. Un barreau de Terfenol-D est placé au coeur d'un solénoïde dans lequel circule un courant électrique / continu, ceci de manière à obtenir une excitation magnétique H continue. De plus le barreau est contraint mécaniquement et la contrainte imposée est mesurée par une cellule de charge. Le but de Kellogg étant de caractériser le comportement magnétostrictif du matériau, celui-ci a mesuré la déformation S par le biais de jauges de déformation et la magnétisation M par une sonde à effet Hall. Les essais de Kel-logg ont consisté à faire varier lentement la contrainte T pour différentes excitations magnétiques H constantes.
I'
> _c
Vc
t * > > _c
Vc
H3__
_ > M, SFIGURE 2.7 - Schéma du dispositif expérimental utilisé par Kellogg pour caractériser
les propriétés du Terfenol-D
est de déceler la zone de comportement dans laquelle l'interaction entre les domaines mécanique et magnétique est élevée, ceci afin de maximiser la récupération d'énergie. Le cas étudié par Kellogg est unidirectionnel selon l'axe longitudinal du barreau (axe 3). Les grandeurs décrites ici sont donc de direction parallèle à l'axe facile d'aimantation Xs, les différents tenseurs de la loi de comportement 2.2 se réduisent à des scalaires, soit :
!
S = sHT + dH
B = dT + pTH (2-7)
où les indices 33 sont omis pour simplifier l'écriture.
Cette loi linéaire est cependant un cas idéalisé du comportement magnétostrictif. En effet, le comportement magnétostrictif est linéaire seulement sur une faible plage, comme vont le montrer les courbes présentées ciaprès.
2.3.1 Étude magnétomécanique
La récupération d'énergie par magnétostriction utilise l'effet Villari. De façon pra tique, elle est réalisée par un solénoïde qui convertit l'énergie magnétique en énergie électrique. L'interaction magnétomécanique, symbolisée par le coefficient piézomagné tique d reliant la contrainte T au champ magnétique B, doit alors être maximisée. L'évolution du coefficient piézomagnétique du TerfenolD est tracée sur la courbe de la figure 2.8 pour différentes valeurs d'excitations magnétiques H continues.
Le coefficient d représente le rapport du champ magnétique produit sur la contrainte appliquée. À une excitation magnétique donnée, il est donc avantageux d'avoir un coef ficient d important de manière à obtenir un champ magnétique B (et donc une magné tisation M) le plus grand possible pour une contrainte donnée. D'après la figure 2.8, on remarque que le coefficient d est maximum, en valeur absolue, pour une contrainte T de 14 M P a et une excitation magnétique H de 16.1 kA ■ m 1, à ce point de fonctionne
ment d vaut 0.025 T • M P a '1. Ainsi, en faisant varier la contrainte autour de 14 M P a
avec une excitation magnétique de 16.1 kA ■ m 1, le champ magnétique B obtenu est
maximisé. Ce point de caractéristique est alors tout indiqué pour constituer le point de fonctionnement initial du générateur.
La figure 2.9 présente l'évolution de la magnétisation M du TerfenolD en fonction de la contrainte T, pour diverses excitations magnétiques H. La zone dans laquelle le matériau présente la plus forte variation de magnétisation M pour la plus faible variation de contrainte se situe à une contrainte avoisinant 14 M P a . Cette valeur de contrainte correspond à la zone où le coefficient piézomagnétique d est maximum, ce qui confirme l'information donnée par les courbes de la figure 2.8. De plus, la contrainte de 14 M P a se situe dans une région de l'interaction magnétomécanique qui peut être
0.05 193.2 kA/m |d| max 60 40 Contrainte (T), MPa 0 l4MPa
FIGURE 2.8 Coefficient piézomagnétique du TerfenolD en fonction de la contrainte pour diverses excitations magnétiques de 0 à 193.2 kA/m par pas de 16.1 kA/m [13] linéarisée, cette zone est représentée par la droite tracée au coeur de l'hystérésis sur la figure 2.9. On en discutera davantage dans la section suivante.
2.3.2 Étude mécanique
La figure 2.10 présente l'évolution du module d'Young du TerfenolD en fonction de la contrainte appliquée pour différentes excitations magnétiques. Pour une excitation magnétique continue de 16.1 kA • m 1, ces courbes montrent que le module d'Young du
TerfenolD est minimum aux environs de 14 M P a . Ces valeurs d'excitation magnétique et de contrainte sont les mêmes que celles permettant d'obtenir le coefficient piézoma gnétique d maximum. En utilisant un tel point de fonctionnement on peut alors obtenir l'interaction magnétomécanique maximale tout en ayant le module d'Young minimal. Le fait que le module d'Young soit faible permet d'avoir un système plus flexible et donc une fréquence naturelle plus faible, permettant ainsi de diminuer les pertes par courants de Foucault (voir chapitre suivant).
La figure 2.11 présente sous un angle différent la même information que la figure 2.10. Elle décrit l'évolution de la déformation en fonction de la contrainte appliquée pour di verses excitations magnétiques. Comme l'indique la droite tracée sur la figure 2.11, pour une excitation de 16.1 kA ■ m 1 et une contrainte de 14 MPa, le point de fonctionne
![FIGURE 1.5 Trois types de structures possibles pour un générateur électrostatique en micromachinerie [25]](https://thumb-eu.123doks.com/thumbv2/123doknet/5519468.131779/19.904.138.802.97.518/figure-types-structures-possibles-générateur-électrostatique-micro-machinerie.webp)
![FIGURE 2.8 Coefficient piézomagnétique du TerfenolD en fonction de la contrainte pour diverses excitations magnétiques de 0 à 193.2 kA/m par pas de 16.1 kA/m [13]](https://thumb-eu.123doks.com/thumbv2/123doknet/5519468.131779/37.904.193.790.92.520/figure-coefficient-piézomagnétique-terfenol-fonction-contrainte-excitations-magnétiques.webp)
![FIGURE 2.11 Déformation du TerfenolD en fonction de la contrainte pour diverses excitations magnétiques de 0 à 193.2 kA/m par pas de 16.1 kA/m [13]](https://thumb-eu.123doks.com/thumbv2/123doknet/5519468.131779/40.898.149.789.91.533/figure-déformation-terfenol-fonction-contrainte-excitations-magnétiques-ka.webp)