CONCEPTION, CARACT ´ERISATION ET VALIDATION D’UN EMBOUT DE FIL-GUIDE MAGN´ETIQUE DIRIG´E PAR UN APPAREIL D’IMAGERIE `A
R´ESONANCE MAGN ´ETIQUE AM´ELIOR´E
VIVIANE LALANDE
INSTITUT DE G´ENIE BIOM ´EDICAL ´
ECOLE POLYTECHNIQUE DE MONTR´EAL
M ´EMOIRE PR´ESENT´E EN VUE DE L’OBTENTION DU DIPL ˆOME DE MAˆITRISE `ES SCIENCES APPLIQU´EES
(G ´ENIE BIOM ´EDICAL) AVRIL 2012
´
ECOLE POLYTECHNIQUE DE MONTR´EAL
Ce m´emoire intitul´e :
CONCEPTION, CARACT ´ERISATION ET VALIDATION D’UN EMBOUT DE FIL-GUIDE MAGN´ETIQUE DIRIG´E PAR UN APPAREIL D’IMAGERIE `A
R´ESONANCE MAGN ´ETIQUE AM´ELIOR´E
pr´esent´e par : LALANDE Viviane
en vue de l’obtention du diplˆome de : Maˆıtrise `es sciences appliqu´ees a ´et´e dˆument accept´e par le jury d’examen constitu´e de :
Mme VILLEMURE Isabelle, Ph.D., pr´esidente
M. MARTEL Sylvain, Ph.D., membre et directeur de recherche Mme BOUDOUX Caroline, Ph.D., membre
`
A Ad`ele, Salinge, Delphine, Ginette et Dicite. . .
REMERCIEMENTS
En premier lieu, je tiens `a remercier mon directeur de recherche, Pr. Sylvain Martel, qui m’a fait confiance et m’a donn´e l’opportunit´e de travailler sur ce projet motivant. Il m’a apport´e les moyens d’accomplir ce projet en me donnant acc`es `a un ´equipement exceptionnel et en m’offrant des objectifs ambitieux. Nous sommes tous conscient de la chance que nous avons de r´ealiser notre recherche dans ce laboratoire.
Je suis reconnaissante envers Pr. Boudoux et Pr. Villemure qui ont accept´e d’´evaluer mon travail et qui ont apport´e des corrections tr`es constructives `a ce m´emoire.
Sans Pr. Fr´ed´erick P. Gosselin ma maˆıtrise n’aurait pas ´et´e la mˆeme. Depuis son arriv´ee `
a l’´Ecole Polytechnique, il m’a guid´ee au travers des diff´erentes ´etapes de ma recherche en prenant le temps de m’aider, de m’expliquer, de me faire prendre du recul et de me relire. Nos ´
echanges ont toujours ´et´e productifs et m’ont toujours motiv´ee `a avancer dans ma recherche. Mes coll`egues et amis Charles Tremblay, Manuel Vonthron et Benjamin Conan ont travaill´e d’arrache-pied, en ´equipe, pour r´ealiser la plateforme de guidage en un temps record et dans une constante bonne humeur. Je tiens d’ailleurs `a remercier particuli`erement Charles Tremblay pour ses bons conseils, ses formations techniques et son aide indispensable `a toutes les ´etapes de ma maˆıtrise. Manuel Vonthron a jou´e un rˆole important pendant ces ann´ees de maˆıtrise en m’aidant dans l’ex´ecution d’exp´eriences, en r´ealisant des logiciels, en me relisant... Merci `a eux.
Les derni`eres exp´eriences n´ecessitaient le concours de nombreuses personnes. Elles ont pu se r´ealiser simplement grˆace `a l’aide et au professionnalisme de tous les acteurs de ces exp´eriences venus du CHUM Notre Dame et de l’Universit´e de Montr´eal. Le support et l’expertise de Dr. Gilles Soulez et de Dr. Gilles Beaudoin auront ´et´e indispensables pour ce travail. Les conseils et l’aide de Jocelyne Lavoie, de Michel Gouin, de Joann Levesque et du v´et´erinaire St´ephane M´enard nous ont ´et´e tr`es pr´ecieux et je les remercie pour leur disponibilit´e, leur gentillesse et leur efficacit´e.
L’animalerie du CHUM Notre Dame, par le biais de Isabelle Houle et de H´el`ene H´eon, nous a apport´e son soutien en nous aidant et nous conseillant dans l’´elaboration de notre animalerie et de nos exp´eriences. Je les en remercie.
Au quotidien, la pr´esence de Ga¨el Bringout, d´esign´e responsable de tous les maux du laboratoire, Nina Olamaei, devenue experte en argot fran¸cais, Alexandre Bigot, Dominique De Lanauze, Nasr Tabatabei, Ouajdi Felfoul, Mahmood Mohammadi, voleur de frites officiel du laboratoire, Chantal Balthazard, Yasmin Barrios, Neila Kaou et tous les autres membres aura permis de travailler dans un milieu dynamique et d’entraide.
Mes remerciements s’adressent ´egalement `a tous mes proches qui m’ont toujours soutenue et relu attentivement.
Mon exp´erience qu´eb´ecoise n’aurait pas ´et´e la mˆeme sans l’excellent enseignement de Taekwon-do ITF de Maˆıtre Forget et de toute son ´equipe d’instructeurs au CEPSUM. Leur apport aura ´et´e majeur dans mon d´eveloppement et dans mon int´egration au Qu´ebec. C’est une exp´erience que je n’oublierai pas.
R´ESUM´E
Le cath´et´erisme endovasculaire est une proc´edure utilisant les vaisseaux sanguins pour faire naviguer des outils m´edicaux `a des fins th´erapeutiques. L’efficacit´e des outils d´epend de la g´eom´etrie des art`eres, de la dext´erit´e du manipulateur et des techniques de visualisation. Par exemple, l’avanc´ee des outils dans la vasculature est limit´ee par la friction des outils sur les vaisseaux, par les r´eductions de diam`etre des vaisseaux, par la tortuosit´e de ceux-ci, par la forte angulation qui existe entre les art`eres... Actuellement, pour visualiser la progression des outils dans le corps, le radiologue interventionniste r´ealise le cath´et´erisme avec un fluoroscope dont les radiations sont ionisantes pour les patients et le corps m´edical.
Ces probl´ematiques de navigation et de nocivit´e sont `a l’origine de notre projet. Notre objectif est d’une part d’am´eliorer le guidage des outils utilis´es pour le cath´et´erisme endo-vasculaire et d’autre part d’utiliser une technologie de visualisation inoffensive pour tous les acteurs de la proc´edure de soin. Nous proposons d’utiliser un appareil d’imagerie `a r´esonance magn´etique (IRM) qui permet `a la fois d’´eliminer tout probl`eme de nocivit´e et d’obtenir une meilleure visualisation des tissus environnants. Cependant, l’appareil IRM pr´esente un coˆut cons´equent amenant `a un nombre d’IRM tr`es limit´e dans les hopitaux et donc `a une disponibilit´e limit´ee de cette m´ethode d’imagerie. L’appareil IRM a la particularit´e d’ˆetre compos´e d’un aimant puissant produisant un champ magn´etique unidirectionnel et de bo-bines de gradient magn´etique tridimensionnelles. Notre hypoth`ese est que le contrˆole de ces ´
el´ements permet de cr´eer une force magn´etique dans toutes les directions de l’espace et ainsi d’attirer tout objet magn´etique dans la direction choisie. `A partir de cette hypoth`ese, nous proposons de d´evelopper une nouvelle technologie de guidage : un embout magn´etique qui se fixe `a l’extr´emit´e des outils du cath´et´erisme (cath´eter ou guide) afin de pouvoir diriger activement l’extr´emit´e de l’outil `a l’aide d’une force magn´etique.
Pour atteindre ces objectifs, nous utilisons un IRM am´elior´e dont la capacit´e `a produire une force magn´etique est multipli´ee par 20 par rapport `a un IRM clinique. Dans notre ´etude, nous concevons plusieurs embouts diff´erents que nous caract´erisons ensuite afin d’´evaluer leurs performances et de les comparer avec celles d’outils standards. Enfin, la derni`ere ´etape est celle de la validation qui permet de v´erifier que la technologie est fonctionnelle en conditions r´eelles, soit in vivo.
Notre caract´erisation s’appuie sur des montages exp´erimentaux de notre conception qui nous aident `a quantifier les d´eformations obtenues sur un outil dot´e d’un embout magn´etique sur lequel une force magn´etique est appliqu´ee. Une mod´elisation th´eorique vient appuyer les quantifications exp´erimentales en expliquant l’origine du comportement de l’outil. Nous
´
etudions ´egalement la capacit´e de manœuvrabilit´e de notre outil que nous comparons avec celle d’outils pr´esents sur le march´e. D’autres montages exp´erimentaux nous permettent de comprendre le m´ecanisme de passage d’un outil dans une intersection ainsi que l’angulation maximale que notre outil peut atteindre. L’ensemble de cette caract´erisation nous a amen´es `a constater que le m´ecanisme de passage d’un outil dans la vasculature est plus complexe qu’il n’y parait et que de nombreux param`etres entrent en jeu. Nous avons ´egalement pu mettre en avant les capacit´es de manœuvrabilit´e de nos outils qui sont meilleures que celle des outils standards test´es.
Enfin, l’´etape de validation nous a permis de faire naviguer avec succ`es notre outil dans la vasculature de lapines chez lesquelles nous avons r´eussi `a atteindre, d`es la premi`ere tentative, toutes les art`eres test´ees.
L’ensemble de ces r´esultats nous permet de proposer un embout, dont les performances ont ´et´e ´evalu´ees, mais aussi toute une nouvelle plateforme de guidage d’outils magn´etiques destin´es aux proc´edures de cath´et´erisme sans utilisation de radiations ionisantes.
ABSTRACT
Endovascular catheterization consists in navigating medical tools inside the blood vessel network at therapeutic ends. The efficiency of these tools depends on the vessel’s geometry, the doctors’s dexterity and the imaging technique. Indeed, the tools progress in the vascular network is limited by the friction of the vessels walls, the progressive shrinking of the vessels lumen, their tortuosity, the angle between the vessels intersections... Currently, the tool’s progress in the body is imaged with a fluoroscopic apparatus which radiations are ionising for both patients and the medical team.
These steering and health issues are the reason of our project. Our goal is to improve the steering of catheterization tools while using an innocuous imaging technique. We thus propose to use a Magnetic Resonance Imaging (MRI) system for catheterization procedures that would eliminate any noxious sources and provide a better visualisation of the surroundings tissues. The MRI system is made of a powerful magnet and tridimentional gradient coils. Our hypothesis is that the combinaison of these two hardwares can create a 3D-magnetic force to attract any magnetic material towards any direction. From this hypothesis, we develop a new steering technology: a magnetic tip attached to the distal end of catheterization tools (catheters or guidewires) in order to actively steer the distal end of the tool with a magnetic force. The MRI system provides both excellent and safe imaging and magnetic steering possibilities. However, this apparatus has a limited availability in clinical constraints due to its cost. In our experiments, to improve its magnetic force, we use an upgraded MRI system able to produce a magnetic force 20 times larger than a clinical MRI.
In our study, we design several tips that we also characterize in order to evaluate their performances and compare them with those of standard tools. We use laboratory-made experimental setups to quantify the static deformation of our upgraded catheter under a magnetic force. A theoretical model explains and predicts its behavior for different tip con-figurations. We also study the steerability of our upgraded catheterization tool and compare it to standard tools. Our experimental setups also help us understand the mechanics of the tool entrance in an intersection and the maximal angle our tool can reach. The whole char-acterization brought us to notice that the guidewire entrance into an intersection is more complex than expected and numerous parameters are involved. We could also notice that our tools have better steerability than those of standards tools according to our evaluation method.
Beyond our upgraded and steerable tool, we developed a whole steering platform that enabled us to push our characterization process further. We successfully navigated our tool in rabbits vascular network. At first attempt, we could steer our device into every tested artery.
We thus propose a tip, which performances have been evaluated, and a new steering platform, in order to catheterize patients more efficiently and safely.
TABLE DES MATI`ERES
D´EDICACE . . . iii
REMERCIEMENTS . . . iv
R´ESUM´E . . . vi
ABSTRACT . . . viii
TABLE DES MATI`ERES . . . x
LISTE DES TABLEAUX . . . xiv
LISTE DES FIGURES . . . xv
LISTE DES ANNEXES . . . xviii
LISTE DES SIGLES ET ABR´EVIATIONS . . . xix
CHAPITRE 1 INTRODUCTION . . . 1
1.1 Motivations . . . 2
1.1.1 Le cath´et´erisme . . . 3
1.1.1.1 Les ´etapes du cath´et´erisme . . . 4
1.1.1.2 Les unit´es utilis´ees . . . 5
1.1.2 Le cath´eter, le guide et les probl`emes rencontr´es . . . 6
1.1.2.1 L’angulation . . . 6
1.1.2.2 La disposition . . . 8
1.1.2.3 La tortuosit´e . . . 9
1.1.2.4 La transmission de la force . . . 10
1.1.2.5 La st´enose . . . 11
1.1.3 Les m´ethodes de visualisation . . . 13
1.1.3.1 Les rayons X . . . 13
1.1.3.2 L’imagerie par r´esonance magn´etique . . . 16
1.1.4 R´esum´e des motivations . . . 18
1.2 Revue de l’´etat de l’art . . . 18
1.2.2 Le guidage . . . 19
1.2.2.1 Le guidage m´ecanique . . . 20
1.2.2.1.1 Pr´eformage . . . 20
1.2.2.1.2 Cˆables de traction . . . 20
1.2.2.2 Le guidage hydraulique . . . 20
1.2.2.3 Le guidage par les propri´et´es des mat´eriaux . . . 21
1.2.2.4 Le guidage magn´etique . . . 21
1.2.2.4.1 Le magn´etisme : . . . 22
1.2.2.4.2 Le couple magn´etique pour le guidage de cath´eter. . 28
1.2.2.4.3 La force magn´etique pour le guidage de cath´eter. . . 30
1.2.3 Comparaison des m´ethodes de guidage . . . 30
1.2.4 Les caract´erisations et les validations . . . 34
1.2.4.1 Les mod`eles in vitro . . . 34
1.2.4.2 Les mod`eles in vivo . . . 34
1.3 Probl´ematique . . . 35
CHAPITRE 2 CONCEPTION DU DISPOSITIF . . . 38
2.1 Conception de notre outil . . . 38
2.1.1 L’embout . . . 38
2.1.1.1 Anisotropie de forme . . . 38
2.1.1.2 Anisotropie magn´etocristalline . . . 40
2.1.1.3 Multi-billes . . . 41
2.1.1.4 La bille unique et le contrˆole du crochet . . . 41
2.1.1.5 Cahier des charges de l’embout . . . 42
2.1.2 Le support . . . 43
2.1.2.1 La compatibilit´e IRM . . . 43
2.1.2.2 La mesure de la rigidit´e . . . 43
2.1.3 Le liant . . . 46
2.1.3.1 Type de fixation . . . 46
2.1.3.2 Evaluation des colles´ . . . 47
2.1.3.3 Contrˆole du crochet par le collage . . . 49
2.1.4 Conclusion et discussion . . . 49
2.2 Conception de mod`eles vasculaires . . . 51
2.2.1 L’´evaluation de l’angulation . . . 51
2.2.2 Le fantˆome r´ealiste . . . 51
CHAPITRE 3 CARACT ´ERISATION DU DISPOSITIF . . . 54
3.1 Etude de la d´´ eformation statique . . . 54
3.1.1 Int´erˆet . . . 54
3.1.2 Proc´edure exp´erimentale . . . 55
3.1.3 Mod`ele th´eorique de la d´eformation . . . 57
3.1.3.1 D´eveloppement du mod`ele . . . 57
3.1.3.2 La force magn´etique dans le cas de dipˆoles multiples . . . 59
3.1.3.3 D´efinition des nombres adimensionnels . . . 60
3.1.3.4 R´esolution . . . 61
3.1.4 Comparaison du mod`ele avec les exp´eriences . . . 62
3.1.4.1 Analyse qualitative . . . 62
3.1.4.2 Analyse quantitative . . . 64
3.1.4.3 Changement d’orientation de la plateforme de test . . . 66
3.1.4.4 Discussion et conclusion . . . 67
3.1.5 Conception retenue . . . 67
3.2 Evaluation de la manœuvrabilit´´ e . . . 69
3.2.1 Int´erˆet . . . 69
3.2.2 Proc´edure exp´erimentale . . . 70
3.2.3 R´esultats . . . 72
3.2.3.1 Analyse quantitative . . . 72
3.2.4 Conclusion et discussion . . . 75
3.3 Etude de la navigation in vitro´ . . . 76
3.3.1 Int´erˆet . . . 76
3.3.2 Proc´edure exp´erimentale . . . 77
3.3.3 R´esultats . . . 77
3.3.4 Conclusion et discussion . . . 82
3.4 Evaluation des limites d’angulation . . . .´ 83
3.4.1 Int´erˆet . . . 83
3.4.2 Proc´edure exp´erimentale . . . 83
3.4.3 R´esultats . . . 84
3.4.4 Discussion . . . 87
CHAPITRE 4 VALIDATION IN VITRO ET IN VIVO . . . 89
4.1 Validation in vitro . . . 89
4.1.1 Int´erˆet . . . 89
4.1.3 R´esultats . . . 90
4.1.4 Discussion . . . 92
4.2 Validation in vivo . . . 93
4.2.1 Int´erˆet . . . 93
4.2.2 Choix exp´erimentaux . . . 93
4.2.3 Protocole exp´erimental . . . 93
4.2.4 R´esultats . . . 97
4.2.5 Discussion . . . 100
CHAPITRE 5 CONCLUSION . . . 106
5.1 Synth`ese des travaux . . . 106
5.2 Solutions propos´ees . . . 107
5.3 Limitations des solutions propos´ees . . . 109
5.4 Am´eliorations futures . . . 110
R´EF´ERENCES . . . 112
LISTE DES TABLEAUX
Tableau 2.1 Mesure de la rigidit´e de 3 outils du commerce et comparaison avec des donn´ees de la litt´erature. . . 46 Tableau 2.2 Evaluation de la r´´ esistance des colles par le temps pass´e dans une
so-lution saline `a 40°C. . . 48 Tableau 3.1 D´etails des caract´eristiques de nos quatre configurations de tests exp´
e-rimentaux. . . 56 Tableau 3.2 Tableau comparatif des avantages et des inconv´enients apport´e par
chaque conception d’embout. . . 68 Tableau 3.3 Description des outils utilis´es. . . 71 Tableau 3.4 R´esultats du passage dans l’intersection ou de l’´echec pour des fantˆomes
ayant des dsdiff´erents et avec ou sans la pr´esence d’une force magn´etique. 79
Tableau 3.5 Comparaisons de plusieurs param`etres calcul´es et mesur´es pour les dif-f´erents fantˆomes. . . 81 Tableau 3.6 R´esultats des tests d’angulation pour les guides Terumo et Balt. . . 85 Tableau 4.1 D´efinition des propri´et´es des outils ´evalu´es et des tests effectu´es. √
signifie ‘oui’ et X signifie ‘non’. . . 90 Tableau 4.2 R´esultats de guidage dans le fantˆome r´ealiste . . . 92 Tableau 4.3 D´etails des r´esultats du guidage in vivo. . . 98 Tableau 4.4 R´esum´e des r´esultats du guidage in vivo. Les ratios repr´esentent le
nombre de r´eussite de passage dans l’intersection par rapport au nombre de tentatives. . . 98
LISTE DES FIGURES
Figure 1.1 Comparaison de la morphologie des arbres et du r´eseau vasculaire . . . 3
Figure 1.2 Carte des vaisseaux sanguins . . . 4
Figure 1.3 El´ements principaux du cath´et´erisme. . . 5
Figure 1.4 Convention de mesure des angles. . . 7
Figure 1.5 Mouvements exerc´es par l’interventionniste. . . 8
Figure 1.6 Comparaison de la visualisation en 2D et 3D. . . 8
Figure 1.7 Irritation des vaisseaux . . . 9
Figure 1.8 Vaisseaux tortueux et friction. . . 9
Figure 1.9 Flambement de l’outil sous une compression. . . 10
Figure 1.10 Perforation des vaisseaux due `a la rigidit´e de l’outil. . . 10
Figure 1.11 Flambement de l’outil versus avanc´ee de l’outil. . . 11
Figure 1.12 Guidage au travers d’une st´enose. . . 12
Figure 1.13 Modalit´es d’imagerie possibles pour l’angiographie. . . 13
Figure 1.14 Plateforme d’angiographie interventionnelle . . . 14
Figure 1.15 Images produites par un fluoroscope. . . 16
Figure 1.16 Angiographie par IRM d’un pancr´eas. . . 17
Figure 1.17 Artefact provoqu´e par une bille ferromagn´etique sur une image IRM. . 19
Figure 1.18 Diff´erentes formes de cath´eter et de guide possibles. . . 20
Figure 1.19 Cath´eter guid´e m´ecaniquement. . . 21
Figure 1.20 Cath´eter guid´e par pression hydraulique. . . 21
Figure 1.21 Hyst´er´esis des mat´eriaux. . . 23
Figure 1.22 Couple et force magn´etiques. . . 24
Figure 1.23 Repr´esentation du champ magn´etique dans la mati`ere. . . 25
Figure 1.24 Repr´esentation des axes et des plans dans un IRM. . . 26
Figure 1.25 Repr´esentation du gradient magn´etique. . . 27
Figure 1.26 Bobines additionnelles d’un IRM. . . 27
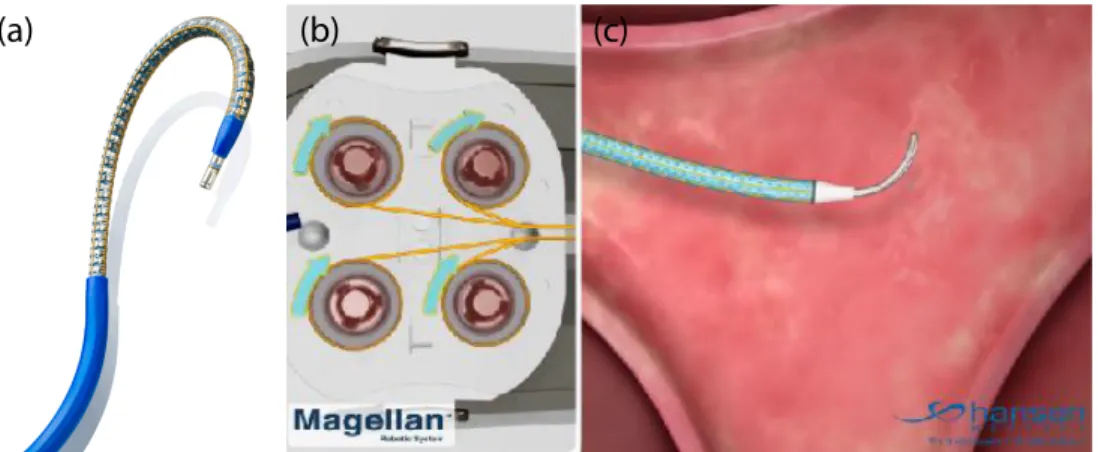
Figure 1.27 Photo du cath´eter de St´er´eotaxis et de sa plateforme de guidage. . . . 28
Figure 1.28 Guidage de cath´eter `a l’aide d’un couple magn´etique. . . 29
Figure 1.29 Guidage de cath´eter `a l’aide d’un couple magn´etique. . . 29
Figure 1.30 Guidage de cath´eter `a l’aide d’un gradient magn´etique. . . 31
Figure 1.31 Sch´ema repr´esentant les diff´erentes fa¸cons de guider des cath´eters ou des guides. . . 32 Figure 1.32 Comparaison des diff´erentes caract´eristiques de tous les outils pr´esent´es. 33
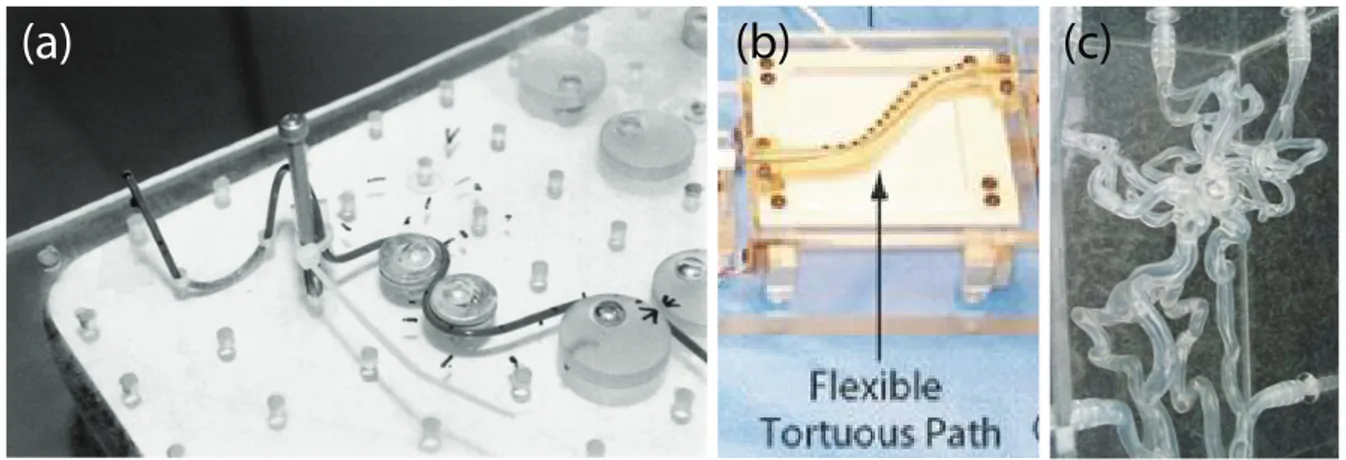
Figure 1.33 Photos de plateformes de test pour ´evaluer les performances d’outils
du cath´et´erisme. . . 34
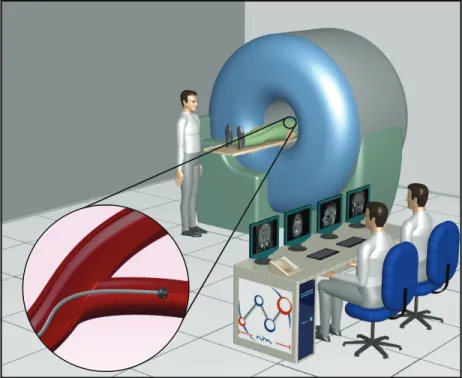
Figure 1.34 Ensemble de la plateforme de test. . . 36
Figure 2.1 Comparaison de l’effet d’un embout anisotrope de forme et isotrope de forme. . . 39
Figure 2.2 Comparaison du comportement de l’outil lorsque la bille est directe-ment attach´ee au support et quand elle est libre de tourner dans un boitier. . . 40
Figure 2.3 Repr´esentation de plusieurs conceptions d’embouts magn´etiques . . . . 41
Figure 2.4 Comparaison de l’influence de la direction de magn´etisation du mat´eriau. 42 Figure 2.5 Repr´esentation de l’apparition d’un crochet dans une vasculature. . . . 43
Figure 2.6 Evolution des conceptions d’embouts. . . .´ 44
Figure 2.7 Repr´esentation de la r´esistance du cath´eter ou du guide `a la force ma-gn´etique due `a la rigidit´e de l’outil. . . 44
Figure 2.8 M´ethode de mesure de la rigidit´e . . . 45
Figure 2.9 Repr´esentation des diff´erentes solutions de collage. . . 47
Figure 2.10 Etapes pour l’´´ evaluation de la r´esistance de la colle. . . 48
Figure 2.11 Proc´edure de collage. . . 50
Figure 2.12 Fantˆomes d’´evaluation de l’angulation des outils. . . 52
Figure 2.13 Photo du fantˆome r´ealiste. . . 53
Figure 3.1 Sch´ema d’un cath´eter d´eform´e par l’application d’une force magn´etique. 56 Figure 3.2 Photographie des embouts ferromagn´etiques utilis´es. . . 57
Figure 3.3 Sch´ema du mod`ele de dipˆole des billes ferromagn´etiques. . . 58
Figure 3.4 Montage photo de la d´eformation du cath´eter soumis `a un gradient magn´etique. . . 62
Figure 3.5 Courbes adimensionnelles du d´eplacement de l’embout du cath´eter et du guide en fonction d’une force magn´etique variante. . . 63
Figure 3.6 Solution num´erique du d´eplacement de l’embout de la poutre en fonc-tion de la force pour plusieurs dipˆoles. . . 64
Figure 3.7 Quantification du saut non lin´eaire de l’embout pour diff´erentes valeurs d’espacement ρ entre les dipˆoles. . . 65
Figure 3.8 Solution num´erique du d´eplacement de l’embout en fonction de la force appliqu´ee sur une poutre orient´ee parall`element au champ B0. . . 66
Figure 3.9 Photographie de l’embout utilis´e pour les prochaines caract´erisations. . 70
Figure 3.10 Vue de haut de la plateforme de test de manœuvrabilit´e. . . 71 Figure 3.11 Repr´esentation des zones de manœuvrabilit´e des outils commercialis´es. 73
Figure 3.12 Repr´esentation des zones de manœuvrabilit´e de nos outils magn´etiques
et comparaison avec les outils standards. . . 74
Figure 3.13 Zigzag effectu´es par MAG1. . . 75
Figure 3.14 Repr´esentation des diff´erents param`etres de la g´eom´etrie des art`eres. . 78
Figure 3.15 Comparaison du comportement du guide sous l’influence d’une force magn´etique. . . 79
Figure 3.16 Exemples de flambement de guide dˆu `a une forte friction. . . 82
Figure 3.17 Illustration du m´ecanisme de flambement et de son intensit´e. . . 83
Figure 3.18 Fantˆomes de verre utilis´es pour quantifier les capacit´es de nos outils. . 84
Figure 3.19 Photo illustrant la courbure du guide. . . 85
Figure 3.20 Illustration des diff´erentes formes de surface. (a) a un angle de 70° et (b) un angle de 110°. . . 86
Figure 3.21 Analyse g´eom´etrique des param`etres influant dans le calcul de θ. . . 87
Figure 3.22 Analyse image par image de l’avanc´ee du guide Terumo dans deux fantˆomes. . . 88
Figure 4.1 Plateforme de test in vitro. . . 91
Figure 4.2 Repr´esentation des art`eres vis´ees lors des exp´eriences chez l’homme et chez l’animal. . . 94
Figure 4.3 Support du lapin plac´e dans l’IRM. . . 94
Figure 4.4 Reconstruction des vaisseaux sanguin de la lapine `a partir d’images IRM. 95 Figure 4.5 Plateforme de test pour une exp´erimentation in vivo. . . 96
Figure 4.6 Salle de contrˆole du tracking, de l’imagerie et de la force magn´etique. . 97
Figure 4.7 Contrˆole de la direction du gradient . . . 99
Figure 4.8 R´esultats des exp´eriences de guidage magn´etique et repr´esentation du tracking. . . 103
Figure 4.9 R´esultats des exp´eriences de guidage magn´etique. . . 104
Figure 4.10 Accumulation de fibrine et d´eformation . . . 104
Figure 4.11 Equipe m´´ edicale et d’ing´enieurs impliqu´es dans les tests in vivo. . . 105
Figure 5.1 Comparaison du cath´eter de Stereotaxis avec nos guides magn´etiques. 107 Figure 5.2 Gamme d’embouts propos´ee . . . 108
LISTE DES ANNEXES
Annexe A Article de journal - Medical Physics, 2011 . . . 120
Annexe B Article de conf´erence - EMBC 2010 . . . 130
Annexe C Protocole In vivo . . . 135
LISTE DES SIGLES ET ABR´EVIATIONS
IRM Imagerie `a R´esonance Magn´etique
2D Deux dimensions
3D Trois dimensions
PMI Proc´edure minimalement invasive
RX Rayons X
PVD Proc´edure vasculaire p´eriph´erique MRA Angiographie par r´esonance magn´etique Fr French (unit´e de distance)
EI Rigidit´e
T Tesla (unit´e magn´etique)
CNC Machine `a commande num´erique
C/S Acier chrom´e
B0 Champ magn´etique principal d’un appareil IRM
M Magn´etisation
m Moment magn´etique
V Volume
Tm Couple magn´etique
Fm Force magn´etique
⃗
∇B, Gz Gradient magn´etique en T/m
µ0 Perm´eabilit´e du vide
r Espacement entre deux billes magn´etiques η Force magn´etique adimentionnelle
ξ D´eplacement de l’embout adimentionnel n Nombre de billes composant l’embout
ρ Espacement adimentionnel entre deux billes magn´etiques
l Longueur du cath´eter
⃗
BBA Champ magn´etique de B sur A
r Rayon de la bille
θe Angle de la poutre `a l’extr´emit´e libre
n Nombre de dipˆoles magn´etiques η Force magn´etique adimensionnelle ζ D´eformation adimensionnelle mesur´ee ρ Espacement adimensionnel entre les dipˆoles
ξ D´eplacement adimensionnel de l’embout de Diam`etre de l’art`ere d’entr´ee
ds Diam`etre de l’art`ere cible
δ D´eflexion de l’embout θ Angle entre la verticale et l ρ Rayon de courbure de l’outil
CHAPITRE 1
INTRODUCTION
Dans la pratique de la m´edecine d’aujourd’hui, la qualit´e de vie, les coˆuts et l’efficacit´e cli-nique sont les maˆıtres-mots qui guident les choix r´ealis´es par les hˆopitaux [1]. Les chercheurs, les ing´enieurs et le corps m´edical proposent depuis des d´ecennies des nouvelles technologies qui am´eliorent au moins un de ces trois besoins. Ainsi, la chirurgie ouverte, lourde proc´edure de soin, s’est vue en partie et petit `a petit remplac´ee par des proc´edures dites minimalement invasives (PMI) qui r´eduisent grandement le traumatisme du corps avec une meilleure effi-cacit´e m´edicale. Ces PMI, prises dans leur ensemble, ont permis une am´elioration des trois besoins des hˆopitaux [2]. Le domaine des PMI est vaste et tr`es vari´e, et repr´esente un sujet tr`es actif de recherche et de d´eveloppement autant dans les entreprises priv´ees que dans la recherche publique.
Nous nous int´eressons plus particuli`erement aux PMI utilisant des outils qui passent par les vaisseaux sanguins pour se rendre `a la zone malade. Notre but est de proposer un outil am´elior´e de diagnostic et de traitement afin de r´ealiser des interventions plus efficacement et dans des conditions de sant´e meilleures pour les patients et les m´edecins. Cet outil, un fil-guide, est actionn´e magn´etiquement et localis´e dans la vasculature du patient par un appareil d’imagerie `a r´esonance magn´etique (IRM), qui est une technologie sans radiations ionisantes [3]. Cet actionnement nous permet de guider notre outil dans les m´eandres du corps humain `a l’aide d’une force magn´etique et sans l’utilisation des technologies classiques de fluoroscopes dont les radiations sont ionisantes.
Ce projet de guidage d’outils s’inscrit dans un plus vaste projet de lutte contre le cancer. La chimioth´erapie, traitement anti-cancer, utilise des substances nocives et n’est actuellement pas cibl´e sur la tumeur ce qui implique que les cellules saines sont autant affect´ees par ce « poison » que les cellules malades. Les effets de ces traitement repr´esentent un coˆut humain et ´economique lourd. Le projet vise `a cr´eer un dispositif qui permettrait aux m´edicaments de cibler uniquement les tumeurs. Pour cela, nous amenons un cath´eter am´elior´e, outil que nous proposons ici, au plus proche de la tumeur. Puis, d`es que les vaisseaux sanguins deviennent trop petits pour le passage d’un cath´eter, celui-ci relˆache des particules magn´etiques. Ces der-ni`eres sont charg´ees de m´edicament anti-cancer et sont, elles aussi, guid´ees dans la vasculature pour atteindre la tumeur et seulement la tumeur [4].
Pour guider le cath´eter dans ces minces vaisseaux, nous avons d´evelopp´e un embout magn´ e-tique, plac´e sur l’extr´emit´e de l’outil et actionn´e par un IRM modifi´e. L’objectif est d’am´ elio-rer les capacit´es de guidage du cath´eter tout en utilisant une technologie d’imagerie inoffen-sive. Le d´eveloppement de notre cath´eter modifi´e est la premi`ere pierre de cet ´edifice de lutte contre le cancer. Dans la suite de ce m´emoire, grˆace `a de nombreuses exp´eriences en labora-toire, nous concevons, caract´erisons et validons les performances m´ecaniques et magn´etiques de notre outil grˆace `a des reproductions de vaisseaux sanguins ainsi que des exp´eriences sur le vivant.
Ce projet de recherche est pluridisciplinaire. Aussi, nous donnons dans cette introduction toutes les informations et connaissances n´ecessaires `a la compr´ehension des chapitres sui-vants pour des lecteurs non-sp´ecialistes. En premier lieu, nous d´etaillons les motivations qui nous am`enent `a d´evelopper notre outil puis nous faisons une revue de litt´erature pr´esentant les principaux outils similaires d´evelopp´es ou en cours de d´eveloppement dans le monde. Enfin, `a la lumi`ere des informations pr´esent´ees, nous terminons avec l’expos´e pr´ecis de la probl´ematique de ce m´emoire.
1.1 Motivations
Avant l’apparition des PMI, le soin le plus courant se faisait par le biais de la chirur-gie ouverte. Aucune m´ethode de diagnostic n’´etait alors d´evelopp´ee. Comme l’origine de la souffrance du patient ne pouvait pas ˆetre identifi´ee, la chirurgie pouvait ˆetre mal dirig´ee et inefficace. Avec le d´eveloppement des m´ethodes d’imagerie et de diagnostic, la chirurgie est devenue de plus en plus cibl´ee et efficace. Cependant, malgr´e les efforts, la chirurgie explo-ratoire reste une proc´edure lourde et coˆuteuse. Pour soigner `a un endroit pr´ecis, c’est toute l’´epaisseur du corps depuis l’ext´erieur jusqu’`a la zone cibl´ee qui est ouverte. Les traumatismes sont multiples, et le soin doit ˆetre aussi efficace pour la plaie que pour le mal qui a ´et´e trait´e. Les risques d’infections et de complications sont possibles. Une perte de sang et des cicatrices accompagnent ce type de proc´edure. La r´ecup´eration du patient suite `a l’intervention est longue puisque la blessure est grande, ce qui va de pair avec un s´ejour prolong´e en milieu hospitalier, une consommation accrue de m´edicaments et une reprise lente de l’activit´e du patient. En dehors des probl´ematiques de sant´e, les coˆuts ´economiques pour la soci´et´e et le patient sont, eux aussi, tr`es importants.
`
A partir de ces constats, les PMI se sont d´evelopp´ees et leurs applications sont vari´ees pour remplacer certaines chirurgies. Les m´edecins utilisent `a pr´esent les orifices naturels ou bien les vaisseaux sanguins pour naviguer des outils `a l’int´erieur de ces r´eseaux cr´e´es naturellement et qui permettent d’atteindre des endroits pr´ecis du corps pour r´ealiser un diagnostic ou un
soin.
Dans toute la suite, notre int´erˆet se porte sur les proc´edures minimalement invasives endovasculaires. Il convient de faire le point sur quelques notions indispensables.
Les vaisseaux sanguins. Pour r´eguler notre temp´erature ou alimenter nos muscles et nos organes, il existe un immense r´eseau ferm´e de transport de nutriments et d’hormones dans lequel circule le sang. Les art`eres s’´etendent du cœur aux tissus et les veines font le trajet retour des tissus vers le cœur. Ces deux types majeurs de vaisseaux ont des fonctions diff´erentes : par exemple, les art`eres am`eneront un sang charg´e en oxyg`ene aux tissus pour les alimenter, tandis que les veines ram`eneront leurs d´echets, comme le dioxyde de carbone [5].
L’alimentation de tous les tissus du corps r´eclame un r´eseau vasculaire complexe, en trois dimensions (3D) et tr`es ramifi´e `a l’image d’un arbre (Figure 1.1). Chacune des ramifications de l’arbre vasculaire est aussi appel´ee une bifurcation ou une intersection et chaque vaisseau sanguin conduit `a un endroit diff´erent. Pour se rep´erer, le m´edecin poss`ede une carte de ce syst`eme sanguin (Figure 1.2) `a l’aide de laquelle il suivra le chemin pr´eexistant des vaisseaux pour se rendre `a un tissu particulier sans cr´eer de dommages sur son passage.
Figure 1.1. Comparaison de la morphologie des arbres (b) avec le r´eseau vas-culaire (a). (Sources : [6, 7]).
1.1.1 Le cath´et´erisme
Dans le champ des proc´edures minimalement invasives, nous nous int´eressons au cath´et´ e-risme endovasculaire qui est une proc´edure faisant l’usage d’un outil appel´e le cath´eter, d´efini dans la suite. Le cath´et´erisme permet le drainage, l’administration de fluides ou de m´ edica-ments, des mesures de pression, des pr´el`evements, des observations, des chirurgies telles que des ablations ou des angioplasties [8].
a
b
c
Figure 1.2. Vaisseaux sanguins d’un lapin qui sert de carte pour le m´edecin. Le choix de prendre l’intersection (a) conduit vers le rein droit, l’intersection (b) vers le rein gauche et (c) vers l’une ou l’autre des pattes.
– un cath´eter d’introduction : cylindre creux de polym`ere long de quelques centi-m`etres. Il est la porte d’entr´ee dans le syst`eme vasculaire (Figure 1.3 (c)).
– un cath´eter : cylindre creux de polym`ere long de plusieurs dizaines de centim`etres et dont le diam`etre ext´erieur est inf´erieur au diam`etre interne du cath´eter d’introduction afin de pouvoir ˆetre gliss´e `a l’int´erieur de ce dernier (Figure 1.3 (e)).
– un fil-guide (souvent abr´eg´e en « guide ») : fil en alliages m´etalliques dont la longueur est plus grande que celle du cath´eter et dont le diam`etre est inf´erieur au diam`etre interne du cath´eter d’intervention afin de pouvoir glisser `a l’int´erieur (Figure 1.3 (f)).
Vocabulaire : Les diam`etres internes sont appel´ees des lumi`eres. On parle de la lumi`ere d’un vaisseau sanguin ou de la lumi`ere d’un cath´eter. `A ne pas confondre avec le diam`etre d’un cath´eter, qui, lorsque la pr´ecision est absente, repr´esente le diam`etre ext´erieur.
1.1.1.1 Les ´etapes du cath´et´erisme
Avant de rentrer dans les d´etails de chacun de ces ´el´ements et de leurs probl´ematiques, il est n´ecessaire de comprendre le fonctionnement de la proc´edure. Pour se rendre `a un endroit
pr´ecis du syst`eme vasculaire, il faut cr´eer une porte d’entr´ee dans ce syst`eme en pla¸cant un cath´eter d’introduction dans l’art`ere choisie soit en r´ealisant une incision fine et pr´ecise soit par ponction percutan´ee (m´ethode de « Seldinger » [9]). Cette « porte » restera fixe pendant toute la proc´edure et c’est en glissant `a l’int´erieur de cette porte que les outils entreront dans le syst`eme vasculaire. Un cath´eter d’intervention est alors gliss´e dans le cath´eter d’introduction et est pouss´e jusqu’`a la zone d’int´erˆet. Comme le cath´eter n’est pas un outil tr`es facile `a diriger, un autre outil est gliss´e en son sein pour l’aider. Ce dernier, un guide, plus maniable, est amen´e `a l’endroit voulu plus ais´ement. Le cath´eter est ensuite tract´e sur le guide. Le fil-guide est retir´e et les outils ou les m´edicaments passent par ce nouveau chemin que le cath´eter a cr´e´e [8].
(a) (b) (d) (e) (f) (c)
Figure 1.3. Sch´ema repr´esentant les principaux ´el´ements utilis´es pour un ca-th´et´erisme. (a) repr´esente les tissus situ´es autour des vaisseaux sanguins (b). Un cath´eter d’intervention (c) est gliss´e dans un cath´eter d’introduction (d). Un fil-guide (e) est gliss´e `a l’int´erieur du cath´eter (c). Une valve (f) permet d’apporter de la saline ou des m´edicaments et sert de valve de fermeture pour ´
eviter la sortie du sang. Le cath´eter (c) et le fil-guide (e) sont courts sur le sch´ema pour des raisons de clart´e.
Vocabulaire : Dans tous les outils m´edicaux ayant une forme longitudinale comme ceux que nous ´etudions, l’extr´emit´e de l’outil la plus proche du m´edecin et qui reste `
a l’ext´erieur du corps est l’extr´emit´e proximale, celle qui se trouve `a l’int´erieur est qui est au plus loin du m´edecin est l’extr´emit´e distale.
1.1.1.2 Les unit´es utilis´ees
On retrouve trois unit´es de longueur utilis´ees pour caract´eriser les outils du cath´et´erisme [10] :
– Le French (Fr) indique le diam`etre externe des cath´eters. A l’origine, le French ne mesure pas le diam`etre, mais plutˆot la circonf´erence externe du cath´eter [10]. Par soucis de simplification, la conversion suivante a ´et´e adopt´ee : 3F r= 1mm
– Les millim`etres (mm) ou les pouces (in) s’utilisent pour parler de la lumi`ere des cath´eters ou bien du diam`etre d’un fil-guide. L’unit´e du syst`eme imp´erial est la plus utilis´ee.
– Les centim`etres (cm) s’utilisent pour parler de la longueur totale de l’outil. 1.1.2 Le cath´eter, le guide et les probl`emes rencontr´es
Depuis que le premier cath´eter a ´et´e invent´e en 1868 [11], ses performances se sont am´ elio-r´ees et une multiplication du nombre de cath´eters disponibles s’est produite pour proposer des sp´ecificit´es diff´erentes telles que : le diam`etre, la longueur, le revˆetement de surface, la rigidit´e, la forme de l’embout, la tractabilit´e1 , la poussabilit´e, la
manœuvrabi-lit´e, la r´esistance `a la pliure ou encore la conformabilit´e. La caract´erisation de notre outil passera par l’´etude de ces param`etres que nous d´efinissons ici.
Face au patient, la premi`ere ´etape dans le choix de l’outil est la longueur du cath´eter et du guide n´ecessaire pour atteindre la zone cible. Nous nous int´eressons aux cath´et´erismes dits s´electifs qui traversent plusieurs intersections dans le syst`eme vaculaire. Les longueurs utilis´ees sont comprises entre 1 et 3m. Le second choix correspond aux diam`etres des outils qui doivent pr´esenter un compromis entre un diam`etre minimal pour naviguer ais´ement et ´
eviter la formation d’un thrombus (caillot sanguin) [12] et un diam`etre maximal pour garantir une bonne solidit´e [13]. Le choix des autres caract´eristiques d´epend de la morphologie des vaisseaux.
1.1.2.1 L’angulation
Une difficult´e que l’on retrouve dans tous les cath´et´erismes est l’angulation qui existe entre le vaisseau sanguin dans lequel l’outil est situ´e et le vaisseau cible (figure 1.4).
Note : Pour d´efinir nos angles, nous posons que le vaisseau sanguin dans lequel se trouve l’outil est la position 0°. Tout ´ecart de cette position donne un angle qui n’a pas de signe (Figure 1.4). Un angle de 90° `a droite ou `a gauche repr´esente une difficult´e identique (et la droite et la gauche sont des notions relatives au point d’observation dans lesquelles nous ne rentrerons pas). Les angles sont donc compris entre 0° et 180°.
1. Les termes utilis´es sont traduits de l’anglais par l’auteur. Ces derniers ´etant des n´eologismes anglais,
0°
90° 90°
Figure 1.4. Convention utilis´ee dans ce m´emoire pour d´efinir la valeur d’un angle. La valeur de 0° (ou de 180°) correspond l’endroit o`u est situ´e l’outil. Tout angle est calcul´e relativement `a la disposition de l’outil. L’angle de la bifurcation repr´esent´e sur le sch´ema est de 120°.
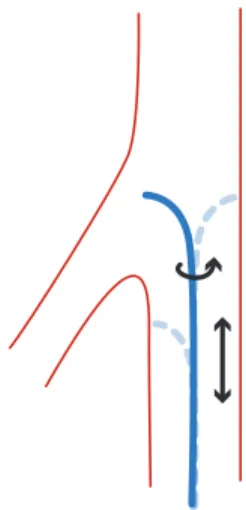
Pour atteindre les intersections angul´ees, les outils sont souvent ´equip´es d’un embout ayant une forme de crochet qui permet de « crocheter » une intersection (voir Figure 1.18) c’est-`a-dire de rentrer dans l’intersection grˆace au crochet de l’extr´emit´e distale. L’utilisation d’une forme d’embout en crochet est la m´ethode la plus utilis´ee pour naviguer dans les vaisseaux et il est un ´el´ement majeur de la manœuvrabilit´e de l’outil.
Le radiologue interventionniste ne peut utiliser que deux types de mouvements produits `a l’extr´emit´e proximale et qu’il cherche `a transmettre `a son extr´emit´e distale (Figure 1.5)
– un mouvement lin´eaire de va-et-vient qui permet au cath´eter d’avancer ou de reculer dans la vasculature ;
– un mouvement de rotation appliqu´e en faisant rouler le cath´eter sous ses doigts ce qui oriente l’embout courb´e dans la direction souhait´ee. Cette action n´ecessite alors une bonne conformabilit´e de l’outil, soit la capacit´e `a reproduire un mouvement de torsion sur toute la longueur de l’outil.
Figure 1.5. Mouvements que l’interventionniste peut transmettre : translation et rotation du guide ou du cath´eter.
1.1.2.2 La disposition
L’interventionniste utilise un appareil qui fourni une image en 2D de la zone o`u il se trouve. Le syst`eme vasculaire et les outils, par contre, sont en 3D et la perte d’information associ´ee `
a cette dimension manquante am`ene un manque de contrˆole des outils. La figure 1.6 montre un cas dans lequel l’art`ere se trouve « vers le haut » mais la m´ethode d’imagerie ne peut pas « voir » cette particularit´e depuis son point de vue. Le m´edecin aura alors beaucoup de difficult´es `a faire rentrer son outil, mˆeme s’il est dot´e d’une forme sp´eciale, puisqu’il cherchera `
a l’orienter sur « la gauche » alors qu’il faut l’orienter « vers le haut ».
x x y y z (a) (b)
Figure 1.6. Repr´esentation de la perte d’information lors du passage d’un en-vironnement 3D (a) `a une visualisation 2D (b)
pour crocheter l’intersection. Ces r´ep´etitions peuvent ˆetre irritantes et traumatisantes pour les vaisseaux allant parfois jusqu’`a l’apparition de vasospasme, `a la cr´eation d’un h´ematome ou encore une perforation du vaisseau (Figure 1.7). Les complications qui s’en suivent, peuvent ˆ
etre tr`es lourdes. Les mat´eriaux des guides d’aujourd’hui ont permis de r´eduire grandement les risques de perforation, mais le probl`eme existe toujours.
(a) (b)
Figure 1.7. Les multiples essais du guide ou du cath´eter pour franchir une intersection peuvent amener `a une irritation ou `a une perforation du vaisseau
1.1.2.3 La tortuosit´e
Parmi les probl`emes rencontr´es dans le cath´et´erisme, la tortuosit´e des vaisseaux, qu’ils soient malades ou sains, apporte une combinaison de plusieurs difficult´es.
La tortuosit´e am`ene l’outil `a entrer en contact avec les parois sur une grande surface (Figure 1.8). L’augmentation de la surface de contact augmente la friction et peut causer une d´eformation du vaisseau, une vasoconstriction, des blessures dues `a la conformabilit´e des outils qui ne serait plus id´eale, et mˆeme une embolisation (obstruction) du vaisseau conduisant `a une isch´emie de l’organe que le vaisseau alimente [14].
Figure 1.8. Une g´eom´etrie tortueuse de vaisseaux sanguins entraˆıne une friction accrue entre les parois des vaisseaux sanguins et l’outil.
La r´eduction de la friction : elle est primordiale contre la tortuosit´e. Pour cela, le revˆetement de surface de l’outil est lubrifiant. Un compromis doit ˆetre trouv´e pour assurer une friction minimale avec le vaisseau et une friction suffisante pour que l’interventionniste sente que l’outil se d´eplace sous peine de perforations non ressenties. Le probl`eme est le mˆeme `a l’int´erieur du cath´eter o`u le revˆetement de surface doit pr´esenter un compromis de lubrification pour permettre au guide de coulisser tout en assurant pour assurer une bonne tractabilit´e du guide.
Flexibilit´e versus rigidit´e. La tortuosit´e r´eclame de la part des outils un certaine flexibi-lit´e pour suivre le chemin mais aussi une certaine rigidit´e pour garder la possibilit´e d’avancer dans ce r´eseau tortueux. La rigidit´e est une propri´et´e qui impacte la plupart des caract´ eris-tiques. Sa valeur d´epend du mat´eriau et de ses dimensions [15].
Dans le cas o`u l’outil est souple, la manœuvrabilit´e est meilleure [16] mais l’intervention-niste aura des difficult´es de poussabilit´e de son outil qui flambera (se courbera) sous la pouss´ee du m´edecin, sans pour autant avancer l’outil (Figure 1.9).
Figure 1.9. Un outil trop souple flambe sous la compression plutˆot que d’avancer dans la vasculature.
A contrario, si l’outil est trop rigide, il n’arrivera pas `a suivre le chemin tortueux. Dans les cas les plus s´ev`eres, l’interventionniste pourra perforer le vaisseau ou il ne pourra simplement plus transmettre son mouvement (Figure 1.10).
Figure 1.10. Un outil trop rigide ne peut pas suivre les courbures des vaisseaux et risque de percer ceux-ci.
1.1.2.4 La transmission de la force
En dehors de la morphologie des vaisseaux, une friction excessive peut ´egalement ap-paraˆıtre lorsque les outils ont parcouru une grande distance dans les vaisseaux. En effet, les
parois des vaisseaux canalisent le mouvement et aident au d´eplacement mais apr`es une longue distance parcourue dans les vaisseaux, une grande surface de l’outil est en contact avec les vaisseaux et la friction est forte. La force de pouss´ee ne contrecarre plus la friction entre l’outil et les parois. L’outil pr´ef`ere alors flamber (se courber) plutˆot que d’avancer dans la vasculature.
Figure 1.11. L’outil pr´ef`ere flamber sous la compression plutˆot que d’avancer dans la vasculature lorsque la friction entre l’outil et les vaisseaux est trop importante.
1.1.2.5 La st´enose
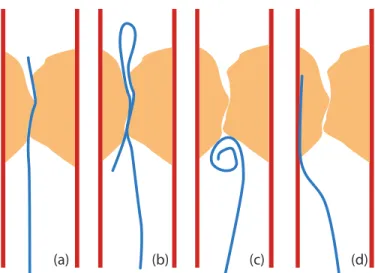
La st´enose est une r´eduction de la lumi`ere du vaisseau sanguin due `a des inflammations, ou `a du diab`ete par exemple. Le soin appliqu´e consiste `a faire passer un guide au travers de la st´enose puis de tracter un cath´eter-ballon (cath´eter qui peut se gonfler) pour d´eployer un stent (maillage m´etallique `a m´emoire de forme) qui r´e-ouvre l’art`ere.
Parfois, le guide est incapable de trouver une entr´ee dans la st´enose comme cela est pr´esent´e en figure 1.12. Le cas (b) montre l’importance pour un guide d’avoir une bonne r´esistance `
a la pliure et donc une bonne rigidit´e. Dans le cas contraire, le guide peut casser ou devenir inutilisable car il adopte une nouvelle forme non contrˆol´ee et inconnue de l’op´erateur.
Le cath´et´erisme est un exercice difficile. L’interventionniste est une personne entraˆın´ee qui poss`ede une grande dext´erit´e pour atteindre les intersections qu’il souhaite. L’efficacit´e des outils qu’il utilise est primordiale. Il faut d’ailleurs souligner que de nombreux besoins sont en contradiction pour la conception de ceux-ci [17] : un guide souple est n´ecessaire pour qu’il s’adapte `a toutes les morphologies de vaisseaux rencontr´ees mais, dans le mˆeme temps, un guide rigide est indispensable pour transmettre les mouvements de l’op´erateur. Pour allier ces deux contraintes, on retrouve souvent un gradient de rigidit´e sur la longueur de l’outil avec une rigidit´e plus importante `a l’extr´emit´e proximale qu’`a l’extr´emit´e distale pour permettre de pousser tout en gardant une certaine manœuvrabilit´e distale [18]. Les cath´eters et les
(a) (b) (c) (d)
Figure 1.12. Difficult´es de passage au travers d’une st´enose. Le cas (a) montre un passage sans probl`eme, le cas (b) montre qu’une partie du guide parvient `a passer en cr´eant un coude. Les cas (c) et (d) montrent des incapacit´es `a trouver l’entr´ee de la st´enose. Image reproduite `a partir de [8].
guides sont alors des produits de haute technologie mais bien souvent, le compromis parfait n’existe pas.
Les m´edecins utiliseront alors plusieurs guides ou cath´eters diff´erents avec tantˆot une bonne poussabilit´e, tantˆot une bonne manœuvrabilit´e. Les complications li´ees aux outils sont ´evalu´es entre 10 et 35% selon les ´etudes [19–24]. Ces r´esultats sont atteints grˆace `a la pr´ecaution du radiologue interventionniste qui connaˆıt les limites des outils et qui peut arrˆeter la proc´edure pr´ematur´ement pour ´eviter tout dommage. L’incapacit´e des outils `a s’adapter `a la morphologie des vaisseaux a amen´e, en 2003, `a une consommation moyenne de 4 guides par proc´edure angiographique, soit une consommation de 1.5 millions de guides par an sur le march´e des ´Etats-Unis seulement. L’ensemble du march´e des produits de radiologie interventionnelle est ´evalu´e `a 2.4 milliards de dollars en 2008 [25].
Les probl`emes que nous avons r´epertori´es ne sont pas sp´ecifiques au domaine biom´edical. D’autres champs d’´etude sont ´egalement pr´eoccup´es par ce manque de contrˆole : par exemple, l’industrie p´etroli`ere tente d’am´eliorer leurs forages horizontaux et leur entretien [26]. Dans notre cas et le leur, les cons´equences de ce manque de contrˆole correspondent `a une incapacit´e `
a se rendre au niveau de la zone `a traiter ou `a forer, `a une cassure ou un d´efaut des outils utilis´es [27] ou `a des blessures vasculaires. Ces probl`emes sont connus et de nombreuses solutions ont ´et´e et sont d´evelopp´ees, dont celle que nous pr´esenterons dans ce m´emoire.
`
A retenir : La navigation est complexe et une manœuvrabilit´e des outils efficace est difficile `a obtenir `a cause de l’angulation des art`eres, de leurs dispositions, des m´ethodes de visualisation, de la tortuosit´e, de la longueur d’outils n´ecessaire et des possibles st´enoses.
1.1.3 Les m´ethodes de visualisation
Le syst`eme vasculaire est complexe (Figure 1.1) et mˆeme si le sch´ema g´en´eral est `a peu pr`es le mˆeme chez tout le monde, ce n’est pas le cas des d´etails. Les diam`etres, la forme et la position changent entre les individus mais aussi suivant la posture du corps, le rythme car-diaque et respiratoire. Autant de changements qui n´ecessitent de voir comment les vaisseaux sanguins sont dispos´es.
Vocabulaire : L’angiographie est le terme employ´e pour d´esigner toute visualisa-tion des vaisseaux sanguins, sans consid´eration pour l’appareil de visualisation. On parle d’angiographie interventionnelle lorsqu’un cath´et´erisme est r´ealis´e `a l’aide une angiographie.
Les rayons X et la r´esonance magn´etique sont deux techniques d’angiographie. Leur fonc-tionnement d´epasse le cadre de cette ´etude et nous ne pr´esenterons que les ´el´ements utiles `a la compr´ehension du pr´esent m´emoire.
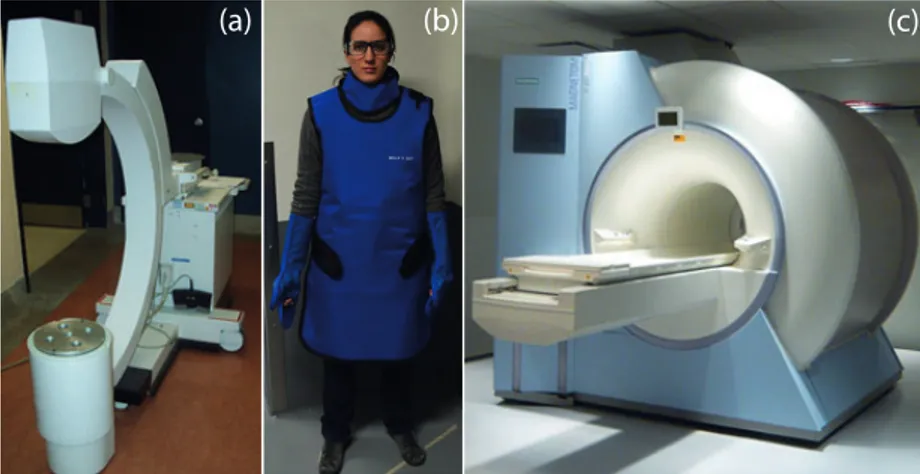
(a) (b) (c)
Figure 1.13. Modalit´es d’imagerie possibles pour l’angiographie. (a) est un ap-pareil de fluoroscopie qui n´ecessite la tenue montr´ee en (b) pour se prot´eger des radiations ionisantes. (c) est un appareil IRM de 1.5 Tesla.
1.1.3.1 Les rayons X
La technologie des rayons X (RX) se base sur la diff´erence d’absorption des rayons entre les os et les tissus mous et elle est connue pour les radiographies de fractures [28]. Les RX
seuls ne permettent pas de distinguer le reste des tissus mous des tumeurs ou des vaisseaux sanguins [29]. Cette technologie est tr`es utilis´ee dans les hˆopitaux car son coˆut est faible (compar´e `a celui d’un IRM), l’infrastructure est moins complexe, la technologie est connue, maˆıtris´ee par de nombreuses personnes et fiable. De plus, il existe des appareils mobiles qui permettent de se rendre au chevet du patient pour r´ealiser des diagnostics.
Deux types d’appareils utilisent les rayons X : le CT scan et le fluoroscope. Le CT scan est capable de r´ealiser des images en 3D mais il n’est pas utilis´e pour r´ealiser des proc´edures de cath´et´erisme interventionnel.
`
A l’aide d’un agent de contraste inject´e dans les vaisseaux sanguins, le fluoroscope (Figure 1.13, (a)) apporte le possibilit´e de r´ealiser des angiographies interventionnelles et est le « gold standard » de l’angiographie interventionnelle.
Pour allier les capacit´es d’angiographie du CT scan avec les capacit´es interventionnelles du fluoroscope, les hˆopitaux ont parfois recours `a la cr´eation de salles de haute technologies combinant les deux types d’appareils (Figure 1.14).
Figure 1.14. Plateforme d’angiographie interventionnelle du centre hospitalier universitaire de Sherbrooke (CHUS) combinant un CT scan et un C-arm (fluo-roscope).
La nocivit´e de la technologie [12]. Les rayons X sont ionisants et `a l’origine de l’appa-rition de cataractes, de cancers, ou encore de st´erilit´es. D’ailleurs, certains patients souffrant de probl`emes cardiaques, ou les femmes enceintes ne doivent pas ˆetre soumis `a des examens
RX du fait de cette nocivit´e [29]. Les patients qui peuvent ˆetre examin´es aux rayons X ne sont soumis qu’`a une faible quantit´e de rayonnement dans la mesure o`u les examens restent ponc-tuels. Une mammographie repr´esente une exposition 12 fois sup´erieure `a l’exposition annuelle normale d’une personne. L’´equipe m´edicale est expos´ee de fa¸con quotidienne `a ces radiations et s’en prot`egent `a l’aide d’une barri`ere physique (Figure 1.13, (b)). Ainsi, ils portent des gilets, des gants, des prot`eges thyro¨ıde et des lunettes de plomb, ´el´ement qui fait barri`ere aux RX. Le plomb est lourd et toute la combinaison am`ene un surpoids de 8 kg environ support´es pendant de longues heures de proc´edures. Des probl`emes de tension dans le dos et d’hernie discale peuvent apparaˆıtre [12].
Le compromis entre l’exposition aux RX et la visualisation. Le but recherch´e est de r´eduire au maximum les doses re¸cues. Ainsi, les rayons X ne sont activ´es qu’en cas de n´ecessit´e. Comme la technologie ne permet pas de voir les vaisseaux sanguins, l’injection d’un agent de contraste est utilis´ee pour cr´eer un contraste suppl´ementaire, visible par l’appareil. La visualisation des vaisseaux sanguin est furtive puisque d`es que l’injection est termin´ee, l’agent est dilu´e par le sang dans les vaisseaux et ils ne sont plus visibles. Le moment de l’injection est enregistr´e et l’interventionniste peut visualiser autant de fois qu’il le souhaite la vid´eo pour avoir une id´ee de la vasculature et ainsi ajuster ses outils pour l’intersection concern´ee. Il avance ensuite ses outils dans la vasculature `a l’aveugle ou bien en regardant en temps r´eel, mais sur une courte dur´ee, le d´eplacement de son cath´eter « dans le vide » (Figure 1.15, (a)) puisqu’au moment o`u il se d´eplace, il n’y a pas d’injection d’agent de contraste et il ne voit donc pas la vasculature.
La nocivit´e de l’agent de contraste. L’agent de contraste utilis´e peut causer des r´ eac-tions allergiques `a l’origine de vomissements, de d´emangeaisons ou, plus grave et plus rare, `
a des chocs anaphylactiques. Ces r´eactions sont amplifi´ees chez les patients en insuffisance r´enale [30].
La visualisation 2D. La fluoroscopie est une projection en 2 dimensions. Il est impossible de d´eterminer `a partir de cette simple vue la g´eom´etrie compl`ete des vaisseaux sanguins ce qui pose des probl`emes de contrˆole des outils (voir la section 1.1.2.2).
Cathéter
(a)
1cm(b)
1cmFigure 1.15. Images produites par un fluoroscope. (a) montre la visualisation sans agent de contraste o`u l’on peut voir les cˆotes en arri`ere plan et le cath´eter au premier plan. (b) montre l’image tr`es furtive obtenue lors de l’injection d’un agent de contraste, les vaisseaux sanguins sont visibles mais le cath´eter ne l’est plus.
`
A retenir : Les rayons X sont `a la base de la technologie la plus commun´ement utilis´ee pour r´ealiser des angiographies mais pr´esentent trois difficult´es : un contraste ne permettant pas de voir les vaisseaux sanguins, une visualisation limit´ee `a de la 2D et l’´emission de rayons ionisants qui obligent le port de lourds tabliers en plomb. La technologie permet de voir des modifications osseuses mais ne permet pas de voir nettement les tumeurs ou les tissus environnants.
1.1.3.2 L’imagerie par r´esonance magn´etique
Un appareil d’imagerie `a r´esonance magn´etique (IRM) (Figure 1.13, (c)) est un scanner permettant d’imager le corps humain en 2D ou en 3D. Il peut ´egalement r´ealiser des mesures du flot sanguin ou de perfusion [29]. Il est sp´ecialis´e dans l’imagerie des tissus mous du corps (Figure 1.16).
L’angiographie par r´esonance magn´etique (MRA) est une utilis´ee cliniquement pour r´ealiser des diagnostics ou des pr´e-´evaluations de la maladie avant l’intervention. Les vais-seaux sanguins peuvent ˆetre vus de deux fa¸cons : soit par l’utilisation d’agents de contraste (diff´erents de ceux pour les RX [29]), soit par une m´ethode dite de temps de vol (« Time of Flight »). Cette derni`ere ne n´ecessite aucun agent de contraste et se base sur le mouvement du flot sanguin pour faire ses images ; son temps d’acquisition est ´egalement plus long. L`a o`u les RX peuvent seulement d´elimiter le pourtour des vaisseaux, la MRA est capable de voir les parois des vaisseaux mais aussi l’ensemble des tissus alentours et leurs morphologies ce
5 cm
Figure 1.16. Angiographie par IRM d’un pancr´eas.
qui rend cette technologie pr´ecieuse pour les interventions li´ees `a des cancers.
Les limitations. L’IRM est une technologie dispendieuse, avec une infrastructure et une utilisation complexe. Les hˆopitaux ne sont ´equip´es que de tr`es peu d’appareils de ce type ce qui am`ene souvent `a un temps d’attente ´elev´e. L’infrastructure associ´ee est lourde et coˆuteuse ; la technologie n’est alors pas mobile. Il n’existe aujourd’hui pas d’application clinique utilisant la MRA en interventionnel car il n’existe pas encore de solutions efficaces pour voir les outils d’un cath´et´erisme, ni pour r´ealiser des images en temps r´eel. Cette visualisation est actuellement un sujet de recherche et sera donc trait´ee dans l’´etat de l’art (section 1.2.1). Enfin, l’IRM ´
etant compos´e d’un aimant puissant, toute personne portant un pacemaker ou tout appareil magn´etique ne peuvent pas b´en´eficier d’un examen IRM. Il n’est pas recommand´e pour les femmes enceintes de r´ealiser ce type d’examen non plus. Enfin, la pr´esence d’´el´ements m´etalliques est ´egalement `a l’origine d’artefact dans les images et peut rendre tout examen impossible selon la localisation des ´el´ements m´etalliques. Les personnes claustrophobes ne peuvent avoir d’examen avec la forme classique d’IRM (en forme de tunnel). Parfois, l’ob´esit´e pourra ´egalement poser probl`eme pour r´ealiser un examen.
`
A retenir : L’IRM n’est pas une technologie utilis´ee pour r´ealiser des angiographies interventionnelles `a cause de son incapacit´e `a voir les outils du cath´et´erisme. Quant elle est utilis´ee, elle ne l’est que pour faire du diagnostic. Elle permet de r´ealiser des images en 3D et de visualiser nettement les tissus environnants tels que des tumeurs sans ´emettre de rayons nocifs. Toute personne portant un pacemaker ou un appareil magn´etique ne peut pas b´en´eficier d’une IRM.
1.1.4 R´esum´e des motivations `
A l’heure actuelle, le cath´et´erisme est une technique utile mais qui manque de pr´ecision et d’efficacit´e `a cause d’un manque de guidage certain. La visualisation des outils dans le syst`eme vasculaire passe par l’utilisation de RX mais elle ne permet que de d´elimiter le pourtour des vaisseaux sanguins. La motivation de ce projet vient alors de la volont´e de supprimer les radiations ionisantes et d’am´eliorer les capacit´es de guidage des outils.
1.2 Revue de l’´etat de l’art
Notre contexte de travail est celui du cath´et´erisme endovasculaire s´electif. Les diff´erentes difficult´es qui lui sont associ´ees motivent de nombreuses ´equipes de recherche. Nous nous penchons sur les solutions que ces groupes ont d´evelopp´ees pour am´eliorer les m´ethodes de visualisation et les m´ethodes de guidage.
1.2.1 Les m´ethodes de visualisation
Les m´ethodes courantes de visualisation du cath´et´erisme sont bas´ees sur la technologie des rayons X dont il est demand´e `a tous de r´eduire les doses autant que possible (ALARA : « as low as reasonably achiveable ») [12]. La suppression compl`ete de l’utilisation des rayons X est investigu´ee en utilisant un appareil IRM dont les avantages et les inconv´enients sont pr´esent´es en 1.1.3.2. Si l’appareil IRM est la solution d’imagerie que nous explorons, la technologie propos´ee dans ce m´emoire n’a pas pour vocation `a remplacer enti`erement l’angiographie interventionnelle par RX puisque les deux appareils pr´esentent des limitations ce qui les rend compl´ementaires.
La visualisation IRM ne permet pas une localisation des outils du cath´et´erisme. Les re-cherches actuelles proposent deux m´ethodes de localisation (que nous appellerons « tra-cking ») : passive et active [29].
La localisation passive s’appuie sur l’utilisation de bagues plac´ees `a l’extr´emit´e des outils et qui cr´eent un contraste suppl´ementaire sur les images IRM. Il est consid´er´e que 10 loca-lisations par seconde sont n´ecessaires pour couvrir les besoins d’une majorit´e des op´erations endovasculaire. La m´ethode passive ne permet pas d’atteindre cette fr´equence et les outils restent difficiles `a localiser sur chaque image.
Les localisations actives requi`erent un ajout de mat´eriel sur le cath´eter tels que des bo-bines ou des antennes. Ces m´ethodes souffrent souvent d’un probl`eme de chauffe des outils qui entrainent une brulure des vaisseaux sanguins et parfois un changement des propri´et´es m´ eca-niques des outils qui modifient les possibilit´es de navigation. Une autre m´ethode de tracking
actif, celle que nous utilisons dans ce m´emoire, se base sur la d´etection de la position d’un embout ferromagn´etique plac´e `a l’extr´emit´e d’un cath´eter. Tout mat´eriau ferromagn´etique plac´e `a l’int´erieur d’un IRM perturbe localement le champ magn´etique et cr´ee un artefact, un trou noir dans l’image IRM produite (Figure 1.17). Le d´eplacement de la position de l’artefact est rep´er´e par une rapide s´equence d’IRM d’excitation par signature magn´etique s´elective (MS-SET) [31–34] ayant une r´esolution de 0.58 mm. Le r´esultat obtenu est un vec-teur de d´eplacement de l’art´efact. La position obtenue est superpos´ee sur une angiographie r´ealis´ee au pr´ealable et la position de l’artefact dans la vasculature est alors connue.
(a) 5 cm (b) 5 cm
Figure 1.17. Images IRM d’artefact d’une bille ferromagn´etique issues de [35]. (a) repr´esente une imagerie classique, (b) correspond `a la s´equence MS-SET qui localise le centre de l’artefact.
Cette technique est une m´ethode efficace de localisation mais elle est trouv´ee en fonction de la position de la bille dans l’IRM. Si le patient bouge, la superposition de la localisation avec l’angiographie qui a ´et´e r´ealis´ee au d´ebut de l’exp´erience n’aura plus de sens. Par ailleurs, la localisation n’est pas ajust´ee en fonction de la respiration du patient.
1.2.2 Le guidage
Le guidage des outils passe g´en´eralement par une modification de l’extr´emit´e distale qui permet une adaptation active de l’extr´emit´e `a la g´eom´etrie des vaisseaux sanguins. Cette adaptation est une flexion de l’embout du cath´eter qui permet de crocheter les intersections. Cette libert´e de mouvement additionnelle par rapport aux outils courants s’acquiert par des moyens m´ecaniques, structurels, hydrauliques ou magn´etiques [36]. Les diff´erentes m´ethodes de guidage sont expos´ees dans la suite et leurs avantages, leurs inconv´enients, stade de d´ eve-loppement sont compar´es `a la fin de la revue de litt´erature sur la figure 1.32.
1.2.2.1 Le guidage m´ecanique
1.2.2.1.1 Pr´eformage Le cath´et´erisme classique utilise des guides et des cath´eters ayant un embout en forme de crochet pour atteindre plus facilement les bifurcations (Figure 1.18). Ces outils sont simples `a fabriquer mais ils ne s’adaptent pas `a la forme de la bifurcation pendant le traitement [8], ce qui implique un changement d’outils `a chaque nouveau besoin, un gaspillage de mat´eriel, de temps et une fatigue du corps m´edical.
Figure 1.18. Diff´erentes formes de cath´eter et de guide possibles pour s’adapter aux g´eom´etries des vaisseaux.
1.2.2.1.2 Cˆables de traction L’adaptation de l’embout `a la forme de l’intersection est solutionn´ee m´ecaniquement en profitant de l’espace offert par la lumi`ere d’un cath´eter pour placer un m´ecanisme de guidage. Plusieurs fils sont install´es sur toute la longueur du cath´eter et r´epartis sur la circonf´erence de l’outil. La traction d’un fil `a l’extr´emit´e proximale entraine une courbure de l’extr´emit´e distale (Figure 1.19) [29,37,38]. Cette technologie est commercia-lis´ee pour r´ealiser des proc´edures d’´electrophysiologie et d’ablation par radiofr´equence dans le cœur [39] mais aussi le traitement des maladies vasculaires p´eriph´eriques [38]. Les appli-cations du guidage m´ecanique restent limit´ees car la technologie est complexe et difficile `a miniaturiser.
1.2.2.2 Le guidage hydraulique
La conception du cath´eter peut ˆetre adapt´ee facilement pour cr´eer des compartiments herm´etiques. Ces derniers re¸coivent une pression hydraulique diff´erente qui am`ene `a faire fl´echir le cath´eter [40]. Le m´ecanisme est simple `a fabriquer et la gamme des outils peut varier de 1mm `a 20mm de diam`etre.
(a) (b) (c)
Figure 1.19. Cath´eter actionn´e `a l’aide de cˆables de traction en (a). La traction de cˆable en (b) induit une flexion en (c)
Figure 1.20. Sch´ema de l’int´erieur d’un cath´eter actionn´e par la pression hy-draulique. Chaque compartiment peut accueillir une pression diff´erente pour le faire fl´echir.
1.2.2.3 Le guidage par les propri´et´es des mat´eriaux
Une autre m´ethode propose d’utiliser des mat´eriaux `a m´emoire de forme ou `a ´echange ionique pour permettre une flexion [41,42]. Les mat´eriaux `a m´emoire de forme ont la propri´et´e de garder la forme qu’on leur donne sans se casser. La forme peut ˆetre donn´ee sous l’influence de la chaleur cr´e´ee par effet joule [43, 44] ou par une pression hydraulique [45]. Les mat´eriaux `
a ´echange ionique, quant `a eux, poss`edent une anode et une cathode dans leurs conceptions. Quand un courant est appliqu´e entre les deux ´electrodes, le mat´eriau se plie du cˆot´e de l’anode.
1.2.2.4 Le guidage magn´etique
Toutes les m´ethodes que nous avons vues pr´ec´edemment ont des mouvements limit´es au nombre de cˆables de traction, de compartiments hydrauliques ou d’´electrodes [36]. Le magn´etisme, par contre, permet d’effectuer un travail `a distance, potentiellement en 3D et sans limitations de mouvement. Il permet d’avoir le contrˆole du mouvement en dehors du
cath´eter. Le guidage magn´etique constitue le cœur de notre travail, aussi, nous pr´esentons les ´
el´ements de magn´etisme indispensables `a la compr´ehension avant de pr´esenter les cath´eters magn´etiques existants.
1.2.2.4.1 Le magn´etisme : il est produit par le mouvement de charges ´electriques qui entraˆıne l’attraction ou la r´epulsion d’objets magn´etiques. Le magn´etisme peut ˆetre cr´e´e par la pr´esence d’un champ ´electrique dans une bobine ou bien peut se trouver `a l’´etat naturel dans certains mat´eriaux.
L’intensit´e magn´etique d’un mat´eriau. En pr´esence d’un champ magn´etique ex-terne, certains mat´eriaux alt`erent localement ce champ soit en augmentant son amplitude, comme le font les mat´eriaux dits ferromagn´etiques ou paramagn´etiques, ou bien en la r´ e-duisant comme les mat´eriaux dits diamagn´etiques. Cet effet d´epend de leurs propri´et´es ma-gn´etiques intrins`eques. Parmi elles, on retrouve le moment magn´etique qui est une sorte de mesure infinit´esimale de l’intensit´e magn´etique du mat´eriau. Ramen´e `a l’´echelle macrosco-pique, l’ensemble des moments magn´etiques correspond `a la magn´etisation (M ) qui s’exprime en A/m et qui se d´efinit comme suit [46]
M = m
V (1.1)
O`u m est le moment magn´etique (A.m2) et V le volume du mat´eriau (m3). Les mat´eriaux
ayant la plus forte magn´etisation sont les mat´eriaux ferromagn´etiques tels que le fer, le chrome, le nickel ou certaines terres rares. Ce sont ceux qui nous int´eresseront pour toute la suite.
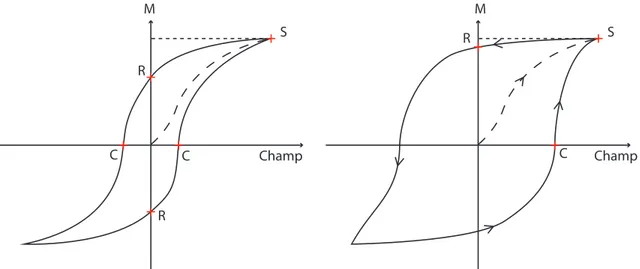
Les diff´erents types de ferromagn´etisme : Sous la pr´esence d’un champ magn´ e-tique ext´erieur fort, en plus d’alt´erer l’intensit´e de ce dernier, les mat´eriaux magn´etiques s’aimantent jusqu’`a une certaine limite appel´ee la magn´etisation `a saturation (Figure 1.21, point S). La magn´etisation de la plupart des mat´eriaux arrive `a saturation sous l’application d’un champ de 1.5 Tesla (T) [47]. Lorsque le champ varie, les mat´eriaux pr´esentent un ph´ e-nom`ene d’hyst´er´esis (Figure 1.21) qui correspond `a une incapacit´e du mat´eriau `a revenir `a son ´etat d’origine lorsque le champ appliqu´e est enlev´e. Pour revenir `a un champ nul au sein du mat´eriau, il faut appliquer un champ magn´etique dans le sens inverse appel´e le champ coercitif (Figure 1.21, point C).
Les mat´eriaux ferromagn´etiques peuvent cependant avoir deux comportements distincts. Lorsque le champ externe est supprim´e, certains mat´eriaux qui ont une hyst´er´esis « fine »