Méthode d'éléments spectraux avec joints pour des géométries axisymétriques
237
0
0
Texte intégral
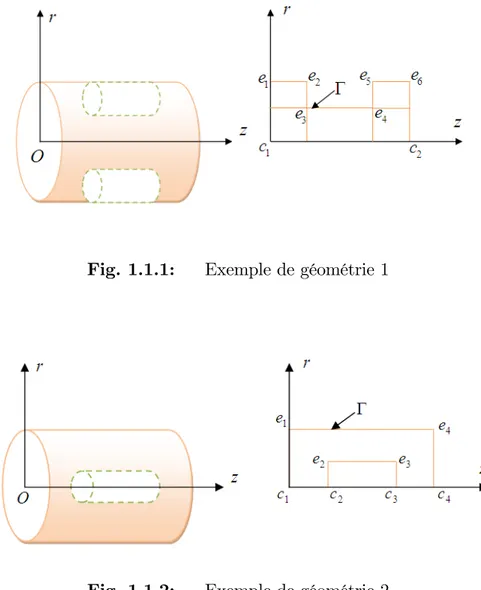
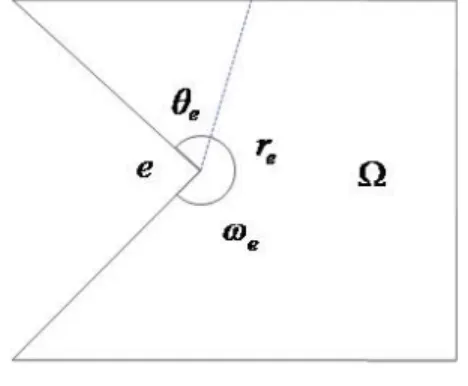
Figure

+7
Documents relatifs