T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par l’Université Toulouse III – Paul Sabatier Discipline ou spécialité : Génie Electrique
JURY
M. Jean – Hugues PAILLOL, Professeur des Universités - PAU. Président M. Olivier LESAINT, Directeur de recherche au G2ELAB, Grenoble. Rapporteur
M. François FOREST, Professeur à l’IES- Montpellier. Rapporteur M. Michel DUNAND, Resp. Interconnexion, Labinal. Examinateur
M. Régis Meuret, Resp. Pôle SPEC, Hispano-suiza. Examinateur
M. Thierry LEBEY, Directeur de recherche CNRS- Toulouse. Directeur de thèse M. Jean-Pascal CAMBRONNE, Professeur à l’UPS- Toulouse. co-Directeur de thèse
Ecole doctorale : Génie électrique, électronique et télécommunications, Toulouse Unité de recherche : Physique, Chimie, Automatique
Directeurs de Thèse : M. Thierry LEBEY, Jean-Pascal CAMBRONNE Rapporteurs : M. Olivier LESAINT, Directeur de recherche au G2ELAB, Grenoble
M. François FOREST, Professeur à l’IES, Montpellier
Présentée et soutenue par
Flavien KOLIATENE
Master Recherche Matériaux pour l’électronique & Ingénierie des Plasmas Maître ès science
Le 5 janvier 2009
Titre :
CONTRIBUTION A L’ETUDE DE L’EXISTENCE DES DECHARGES
DANS LES SYSTEMES DE L’AVIONIQUE
La vie est une succession de paragraphe
La vie est une succession de paragraphe
La vie est une succession de paragraphe
La vie est une succession de paragraphessss qui finissent tous par un point
qui finissent tous par un point
qui finissent tous par un point
qui finissent tous par un point
d’interrogation.
d’interrogation.
d’interrogation.
d’interrogation.
«««« Charlélie Couture
Charlélie Couture
Charlélie Couture
Charlélie Couture»»»»
A
A
A
A
Ma mère,
Ma mère,
Ma mère,
Ma mère, mes frères et sœurs, ma femme, ma fille et
mes frères et sœurs, ma femme, ma fille et
mes frères et sœurs, ma femme, ma fille et
mes frères et sœurs, ma femme, ma fille et ma belle famille…
ma belle famille…
ma belle famille…
ma belle famille…
A
A
A
A
Tous ceux qui me sont chers…
Tous ceux qui me sont chers…
Tous ceux qui me sont chers…
Tous ceux qui me sont chers…
A
A
A
A
La
La
La
Résumé
Grâce aux progrès réalisés dans le domaine de l’électronique de puissance, la puissance électrique embarquée dans les véhicules de transport (automobile, ferroviaire, maritime…) est en constante augmentation. Cette évolution est aussi en train de se produire dans les aéronefs conduisant inévitablement à une augmentation du niveau de tension. La souplesse de contrôle, la maintenance facilitée ainsi que le coût sont les atouts supposés des systèmes dits « Plus
électrique ». Cependant, la mise en place de systèmes plus électriques peut conduire à
l'apparition de phénomènes défavorables aux systèmes d'isolation électrique tels que des décharges. Une étude sur les conditions d’initiation des Décharges Partielles (DP) est donc apparue nécessaire pour garantir la fiabilité des systèmes d’isolation et donc de l’ensemble de la chaîne de puissance électrique.
C'est dans ce cadre que s'inscrit le travail qui est présenté dans ce manuscrit. Une attention particulière est portée à la caractérisation expérimentale de l'existence de DP dans les systèmes électriques embarqués dans les aéronefs. Ceci est lié, d'une part, à l'environnement spécifique (pression, température, humidité,..) et, d'autre part, à l'augmentation du niveau de tension.
Jusqu'à très récemment, ce phénomène n'était pas pris en compte dans les spécifications des équipements électriques embarqués, compte tenu du faible niveau de tension fonctionnement (115V AC et 28V DC). Nous rappelons tout d'abord l'évolution et le besoin en puissance électrique dans les nouvelles générations d'avions de plus en plus électriques. Un état de l'art sur les mesures de DP est ensuite présenté. La phénoménologie de décharges électriques dans l'air et notamment la loi de Paschen sont exposées. Enfin, des expressions correctives issues de la littérature sont présentées et discutées.
Nous présentons ensuite le banc d'essai mis au point permettant, d'une part de caractériser le claquage électrique de l'air sous atmosphère contrôlée (pression, température et taux de l'humidité relative) et d'autre part d'effectuer les mesures de DP sous contraintes aéronautiques. Les mesures effectuées nous ont permis dans une première étape de définir selon la plage de température d'utilisation, le domaine de validité des expressions correctives. Nos mesures montrent ensuite que l'initiation des DP étant inévitable, certains équipements seront plus exposés que d'autres à leur développement dans leurs conditions normales de fonctionnement.
Des recommandations doivent donc être établies afin d'imposer dans les spécifications les mesures de DP comme tests de qualification.
Mots clés : Avionique, Loi de Paschen, Tension de claquage, Isolation électrique, Paramètres
Abstract
Thanks to the progress realized in power electronics field, the electric power embarked on the transport vehicles (automobile, railroad, maritime…) is in constant increase. This evolution is also occurring in aircrafts, leading inevitably to an increase of the voltage level. The control flexibility, the facilitated maintenance as well as the cost are the assumed assets of systems called "More Electric". However, the implementation of more electric systems can lead to the occurrence of unfavourable phenomenons to the insulation electrical systems such as discharges. It seemed therefore necessary to develop a study on initiation conditions of Partial Discharges (PD) to guarantee the reliability of insulation systems which is the whole chain of electric power.
It is in this frame the work relates to and it is presented in this manuscript. A particular attention is carried out concerning the experimental characterization of the PD existence in the electric systems embarked in aircrafts. This is bound, on one hand, to the specific environment (pressure, temperature, humidity) and, on the other hand, to the increase of the voltage level.
Until very recently, this phenomena was not taken into account in the specifications of the embarked electric equipments, considering the low functioning voltage level (115V AC and 28V DC). We remind first of all about the evolution and the need in electric power in the new generations of more and more electric aircraft. A state of the art on the measures of PD is then presented. The phenomenology of electric shocks in the air in particular Paschen law are explained. Finally, corrective expressions coming from the literature are presented and discussed.
Then we present the bench test worked out allowing, on one hand the characterization of the electric strain of the air under controlled atmosphere (pressure, temperature and relative humidity) and on the other hand the measures of PD under avionics constraints. The measures allowed us in a first stage to define according to the temperature set of use, the domain of validity of the corrective expressions. Our measures show then that the initiation of the PD being inevitable, some equipment will be more exposed than the others to PD development in normal functioning conditions.
Recommendations must thus be established to impose within the specifications the PD measures as qualification tests.
Keywords: Avionics, Paschen Law, Breakdown voltage, electric Insulation, Atmospheric
REMERCIEMENTS
En dépit du fait qu’un seul nom d’auteur figure sur la couverture d’un mémoire de thèse !!! Que serait-on, seul face à son sujet de thèse !? Telle est la question que je me pose avant de commencer les traditionnels remerciements… Faire une liste exhaustive de tous les gens que j’ai rencontrées pour faire avancer directement ou indirectement ce travail serait hasardeux… Alors les absent(e)s de cette liste m’excusent, ma mémoire est sélective. Mais à coup sur j’ai pensé à vous à un moment…
Tout d’abord, Je remercie Monsieur Christian Laurent, directeur du Laboratoire
Plasma et Conversion d’Energie (Laplace) pour m’avoir accueilli au sein du dit labo.
Je remercie très sincèrement mes « chefs » Thierry Lebey et Jean Pascal Cambronne qui ont pu encadré et dirigé ce travail avec beaucoup de compétences et de sympathie. Au cours de ces années, votre grande disponibilité, votre rigueur scientifique, votre enthousiasme et vos précieux conseils m’ont permis de travailler dans les meilleures conditions. La confiance que vous m’avez accordée ainsi que nos nombreuses discussions m’ont permis de progresser. Soyez assuré, Monsieurs, de toute mon estime et de mon profond respect. De même, je tiens à souligner la patience et leurs contributions dans la rédaction de ce document. J’exprime toute ma reconnaissance à Sorin Dinculescu et Alain Boulanger qui ont apporté une contribution précieuse pour la mise en place du banc d’essai, sans lequel, la partie expérimentale de ce travail n’aurait pu se réaliser.
Pour les nombreuses discussions, très fructueuses lors des réunions, qui ont permis d’orienter cette étude ainsi que son financement, je remercie le consortium des industriels partenaires ce travail : Technofan, Hispano-suiza, Nexans, Thalès et Labinal représentés respectivement par : Christophe Cester, Regis Meuret & Sebastien Vieillard, Jean-Pierre Ferlier et Hakim Jannah,
Remerciement
Mario Martinez et en particulier Michel Dunand et Kahina Meziani dont les contributions au travers de nombreuses suggestions m’ont beaucoup étayé. Je remercie les rapporteurs de cette thèse Olivier Lesaint et François Forest pour la rapidité avec laquelle ils ont lu mon manuscrit et l’intérêt qu’ils ont porté à mon travail. Merci également au Professeur Jean-hugues Paillol, d’accepter de présider ce jury.
Pour tous les moments passés ensemble au travail et en dehors, j’adresse un sentiment très particulier et toute ma reconnaissance à tous les permanents de l’équipe MDCE que j’ai eu le grand plaisir de côtoyer.
A mes collègues doctorants et post-doctorants : Axel Rumeau, Fabrice Aymonino, Eddy Aubert, Ludovic Menager, Sombel Diaham, Hung, Cyrille Duschene, Tomer Vaday, Maher Souidan ; pour le soutien que vous m’avez apporté tout au long de ma thèse. Je vous exprime toute mon amitié.
Aux ami(e)s : Landry, Phillipe, Guy, Thierry, Salouza, Gaetan, Gerome & Stéphanie, et tous ceux qui n’ont cessé de m’encourager, j’adresse mes vifs sentiments.
A ma belle famille ; Dominique, Chantal, Anne-Sophie, Céline, Marie Claude et Jean-Marie, Françoise,... j’exprime toute ma reconnaissance pour leur soutien assouvi.
Enfin, je tiens à remercier de façon particulière ma femme Sandrine et ma fille Lucile, qui ont été mes précieuses collaboratrices tout au long de cette étude.
Table des matières ___________________________________________________________________________
Table des matières ___________________________________________________________________________
___________________________________________________________________________ 5
-INTRODUCTION GENERALE ... 9
CHAPITRE I :
ENVOL DE LA PUISSANCE ELECTRIQUE EMBARQUEE ... 15
I.1- Généralité sur les sources d’énergies embarquées... 17
I.2- Des avions de plus en plus électriques ... 18
I.2.1- Historique de l’évolution de l’énergie électrique embarquée ... 19
I.2.2- Vers l’avion plus électrique : Génération et réseau de bord ... 20
I.2.2a- Nécessité d’un système Hybride : Electro-hydraulique ... 22
I.2.3- Evolutions futures : Vers le tout électrique et le plus composite ... 23
I.2.3a- Le frein électrique ... 24
I.2.3b- Mutualisation de l’électronique ... 24
I.2.3c- Structure composite ... 25
I.2.4- Positionnement du problème ... 25
I.2.5- Problématique industrielle ... 27
I.3- Fonctionnement et environnement aéronautique ... 28
I.3.1- Identification des contraintes spécifiques du système aéronautique ... 28
I.3.1a- Contraintes de fonctionnement ... 28
I.3.1b- Contraintes environnementales ... 29
b1- Température ... 30 b2- Pression ... 30 b3- Humidité ... 30 b3.1- L’humidité relative ... 31 b3.2- Le rapport du mélange ... 31 b3.3- La température de rosée ... 31 b4- Densité de l’air ... 32
b5- Conditions d’humidité en fonction de l’altitude ... 33
b6- Variation des paramètres atmosphérique en environnement avion ... 34
CHAPITRE II : PHENOMENOLOGIE & MESURES DES DECHARGES
PARTIELLES (DP) ... 37
II.1- Décharges électriques dans les gaz : LE PLASMA ... 39
II.1.1- Bref rappel de la théorie des gaz ... 39
Table des matières ___________________________________________________________________________
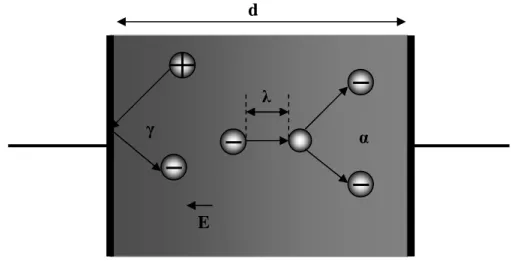
II.1.2a- Les collisions ... 40
II.1.2b- Paramètres physiques d’initiation de la décharge ... 41
II.1.3- Mécanisme de formation et processus physiques des décharges électriques ... 43
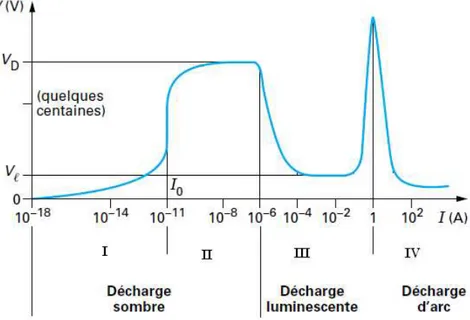
II.1.4- Loi de Paschen : Rappels théoriques ... 45
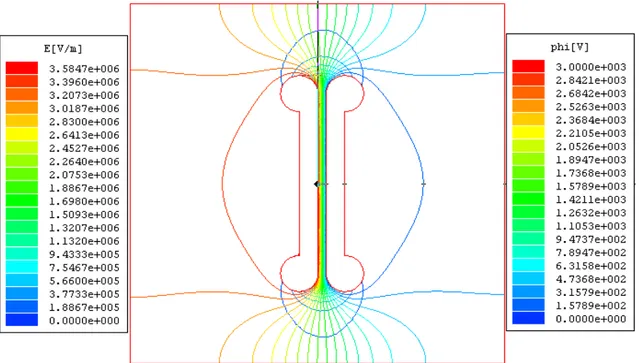
II.1.5- Notion du champ disruptif ... 49
II.1.5a- Influence de la géométrie des électrodes ... 50
II.1.6- Variation des conditions environnementales ... 54
II.1.7- Décharge en présence d’une paroi isolante ... 57
II.1.7a- Combinaison de diélectriques de différentes permittivités ... 58
II.1.7b- Critères de la fonction d’isolation ... 59
II.2- Les décharges Partielles : Etat de l’art ... 59
II.2.1- Définitions et classification ... 6
II.2.1a- Définitions ... 60
II.2.1b- Classification et terminologie ... 60
II.2.2- Les mesures des DP comme technique de diagnostic du système d’isolation électrique ... 61
II.2.2a- Objectif ... 61
II.2.2b- Les différentes techniques de détection... 62
b1- les techniques autres qu’électriques ... 62
b1.1- La détection radio ... 62
b1.2- La détection acoustique ... 62
b1.3- La détection optique ... 62
b2- La détection électrique ... 63
b2.1- Historique ... 63
b2.2- Les montages de détection électrique ... 63
b2.3- Les grandeurs liées aux DP ... 64
b2.3i- Le bruit de fond ... 64
b2.3ii- La calibration de la mesure des DP ... 65
b2.3iii- La Charge apparente ... 65
b2.3iv- Relation entre charge apparente et charge réelle ... 65
b2.3v- Tension d’apparition et d’extinction des décharges (TADP et TEDP) ... 67
b2.3vi- Les grandeurs calculées ... 67
II.2.2c- Techniques d’analyse des DP ... 69
c1- Objectifs ... 69
c2- Procédures ... 69
c3- Reconnaissance par observation directe ... 71
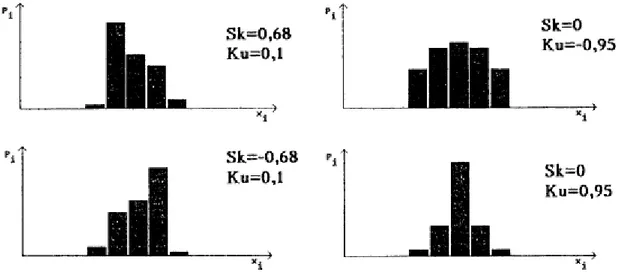
c4- Reconnaissance par utilisation des coefficients statistiques : skewness & kurtosis ... 71
Table des matières ___________________________________________________________________________
___________________________________________________________________________ 7
-II.2.4- Nocivité des DP ... 76
II.2.5- Diagnostics des équipements de l’électronique de puissance ... 77
II.2.6- Les DP et les normes aéronautique : ABD0100 ... 77
CHAPITRE III : CARACTERISATION EXPERIMENTALES ET
RESULTATS ... 79
III.1- Claquage de l’air sous contraintes environnementales ... 81
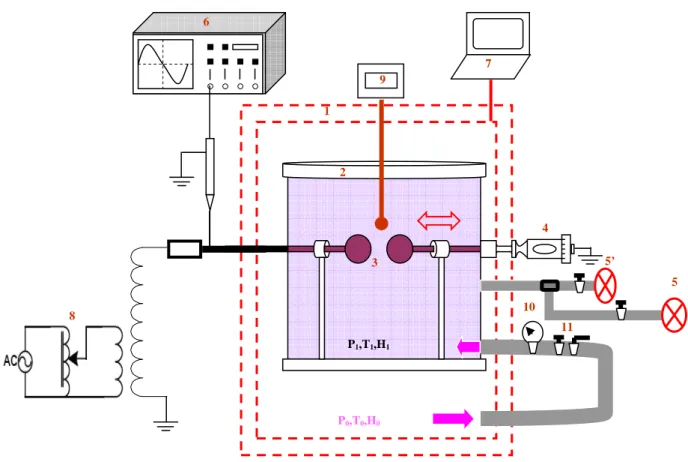
III.1.1- Description du dispositif expérimental ... 81
III.1.2- Mode opératoire et protocoles expérimentaux ... 84
III.1.2a- Essais en température-humidité ... 84
III.1.2b- Essais en pression simulant des variations d’altitude ... 85
b1- Pompage ... 85
b2- Réglage de la distance inter-électrodes ... 86
b2.1- Etalonnage de la vis micrométrique ... 86
III.1.3- Mesure de la tension de claquage de l’air ... 88
III.1.4- Résultats et analyses ... 89
III.1.4a- Comparaison des résultats avec la courbe théorique de Paschen ... 89
III.1.4b- Effet de variation des paramètres environnementaux ... 91
b1- Température et pression ... 91
b2- Humidité ... 95
III.1.5- Validation des facteurs correctifs ... 97
CHAPITRE IV : LES DECHARGES PARTIELLES (DP) DANS LES
SYSTEMES DE L’AVIONIQUE ... 103
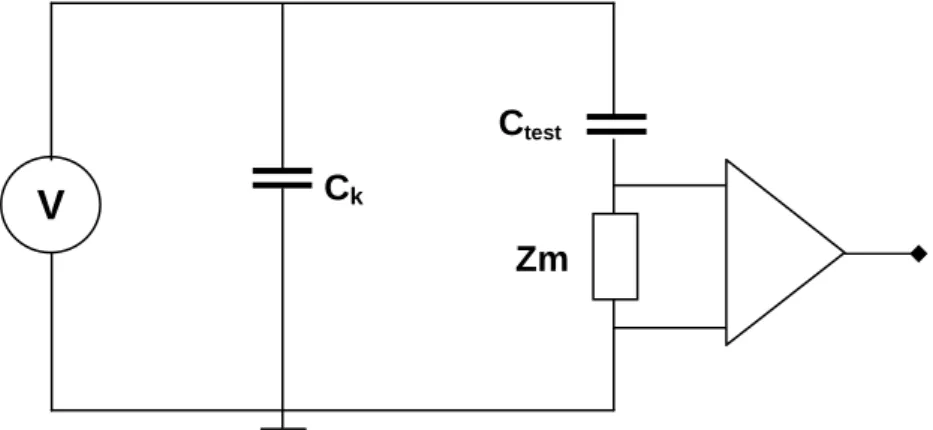
IV.1- Présentation du dispositif ... 105
IV.2- Acquisition et traitement des données ... 107
IV.3- Description des véhicules tests ... 108
IV.4- Caractérisation des DP ... 109
IV.4.1- Environnement de fonctionnement des équipements ... 109
IV.4.2- Mesures des DP ... 110
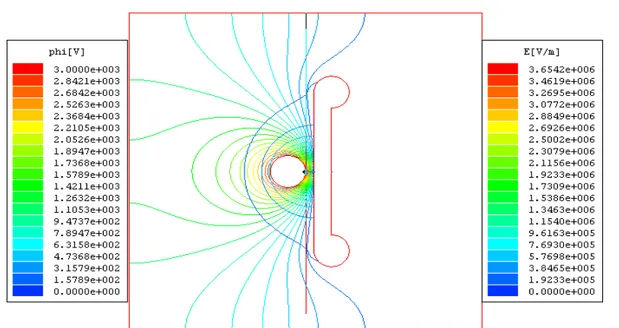
IV.4.2a- Isolation des câbles ... 110
a1- Champ et potentiel dans un câble ... 112
a2- Disposition des câbles aéronautiques ... 113
a3- Résultats des mesures des DP ... 114
a3.1- Influence de la jauge ... 115
a3.2- Influence des contraintes d’installation ... 116
Table des matières ___________________________________________________________________________
IV.4.2b- Isolation statorique ... 119
b1- Mesures des DP en impulsionnelle : Test d’isolation entre spires ... 120
b2- Mesures des DP en AC 50Hz ... 122
b3- Isolation des autotransformateurs ... 124
IV.4.2c- Isolation des composants d’électronique de puissance ... 127
IV.5- Analyses et recommandations ... 129
CONCLUSION ... 131
ANNEXES ... 137
INTRODUCTION
GENERALE
Introduction générale ___________________________________________________________________________
Introduction générale ___________________________________________________________________________
___________________________________________________________________________ 11 Les inquiétudes, entretenues d’une part, par l’augmentation exponentielle de la consommation des énergies fossiles et d’autre part, par le souci de préserver l’environnement ont motivé les acteurs impliqués dans le domaine du transport à mettre en place des solutions alternatives. Une des solutions possibles consiste dans le développement de véhicules plus électriques voire hybrides. Cependant, la mise en place des systèmes plus électriques constitue un challenge. De nombreux défis doivent être relevés pour garantir la fiabilité des systèmes. Dans ce contexte, de l’automobile au ferroviaire en passant par le maritime et l'aéronautique, les systèmes électriques subissent de profondes mutations et doivent être repensés. L’essor de l’électronique de puissance durant ces dernières années participe à ce changement. Fiabilité, modularité, gain de masse, souplesse de fonctionnement sont, parmi d’autres, les qualités qu’apportent ces nouveaux modes de conversion d’énergie. Qui ne peut constater l’évolution faite de la célèbre 2CV à la nouvelle C5 ? De la même manière, la comparaison entre le premier train alimenté par caténaire et le nouveau AGV (Automotrice Grande Vitesse) en dit long sur l’apport d’organes électriques. Retenons que les caractéristiques principales recherchées sont le confort, la sécurité, le coût et l’impact sur l’environnement.
Dans le secteur aéronautique, dont la contrainte principale est la masse embarquée, plusieurs réflexions sont menées pour arriver à ces objectifs en incorporant aussi la fiabilité des équipements. Des investigations sont donc menées sur la fiabilité des convertisseurs statiques (plate forme du Laboratoire Pearl), sur les problèmes liés à la compatibilité électromagnétique et sur la phénoménologie des Décharges Electriques Partielles (DP) notre cas d’étude. Le travail que nous allons présenter s’inscrit dans le cadre d’une collaboration entre le laboratoire Laplace via l’équipe Matériau Diélectrique dans la Conversion d’Energie (MDCE) et les industriels qui interviennent dans la chaîne de puissance électrique embarquée dans les aéronefs. Cette collaboration associe les entreprises du groupe Safran (Labinal, Hispano-Suiza, Technofan), avec Thalès Avionics System (TAES) et Nexans (fabricant de câbles). Improprement appelées corona dans la littérature, les Décharges Partielles (DP) correspondent à des ruptures d’isolation localisées soit à la surface, soit dans le volume du Système d’isolation Electrique (SIE). L’existence de ce phénomène entraîne leur vieillissement précoce. Jusqu’à très récemment, ce phénomène n’était pas pris en compte dans les spécifications relatives aux équipements électriques de l’avionique, compte tenu des faibles niveaux de tension utilisés (115V AC 400Hz et 28V DC). L’augmentation des charges électriques a conduit à une augmentation de la puissance embarquée. Cette exigence se traduira par une augmentation du niveau de tension (230V AC à fréquence variable
360-Introduction générale ___________________________________________________________________________
800Hz et +/-270 ou 0-540V DC). Ainsi, cette augmentation combinée aux contraintes imposées par l’environnement avionique : baisse de pression liée à l’altitude, cycles de température et variation du taux d’humidité, risque de rendre l’existence des DPs inévitable.
Dès lors, tout le problème consiste donc, d’une part à identifier les contraintes spécifiques aux systèmes de l’avionique et d’autre part à quantifier expérimentalement l’impact de ces contraintes sur l’occurrence des décharges afin d’apporter, dans le futur, soit des outils d’aide aux dimensionnements, soit des critères de choix d’équipements via la préconisation des tests spécifiques, pour garantir la fiabilité de la fonction d’isolation.
Dans le premier chapitre, nous présentons l’évolution de l’énergie électrique embarquée dans les aéronefs. Après avoir rappelé les différentes sources d’énergie traditionnellement utilisées, nous nous focalisons sur l’aspect électrique. Notamment l’architecture du réseau de bord et les différentes fonctions qui font appel de plus en plus aux systèmes électriques. Cette évolution a progressivement ouvert la voie vers l’Avion Tout Electrique, et ses conséquences constituent un des challenges à relever. Nous identifions les contraintes spécifiques à l’environnement des systèmes embarqués dans les aéronefs notamment la variation des paramètres atmosphériques, susceptibles d’influencer l’initiation des décharges.
Dans le second chapitre, nous rappelons les principes fondamentaux de la physique des décharges ainsi que l’état de l’art sur l’utilisation des DP comme technique de diagnostic des équipements électriques. Les principaux paramètres physiques, les phénomènes ainsi que les lois sont brièvement rappelés. La revue de la littérature effectuée à cet effet a permis d’identifier des expressions correctives proposées pour prendre en compte l'impact sur la courbe de Paschen d'éventuels écarts liées aux conditions environnementales.
Dans le troisième chapitre, nous décrivons le dispositif expérimental mis au point ainsi que les résultats obtenus. Ce chapitre est consacré à la caractérisation de la décharge électrique en champ uniforme dans l’air sous différentes conditions, obtenues par la variation des paramètres atmosphériques (pression, température et le taux d’humidité relative). C’est le tracé de la loi de Paschen dans ces conditions spécifiques qui constitue notre apport principal. Nous discutons aussi de la validité des expressions correctives proposées dans la littérature.
Introduction générale ___________________________________________________________________________
___________________________________________________________________________ 13 variation des paramètres environnementaux sur la tension d’apparition des DP dans les conditions spécifiques à l’avionique. Nous en déduisons les limites d’utilisation des équipements actuels et nous donnons quelques recommandations.
Enfin, dans la conclusion, nous dégageons les résultats essentiels de cette étude et les perspectives de recherches qui en découlent.
Introduction générale ___________________________________________________________________________
Chapitre I :
ENVOL DE LA PUISSANCE
ELECTRIQUE EMBARQUEE
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 17 L’utilisation de l’électricité dans le monde aéronautique n’est pas récente. Mais, progressivement, les avionneurs ont manifesté un profond souhait d’élargir son utilisation à l’ensemble des fonctions remplies à bord des avions. De surcroît, le confort des passagers comme le développement des distractions à bord (cinéma, jeux,…) ne fait qu’augmenter la demande en puissance électrique embarquée. Dans ce chapitre, tout en rappelant les principales sources d’énergies traditionnellement utilisées, nous présentons succinctement l’évolution et l’intérêt de l’utilisation croissante de l’énergie électrique ainsi que les contraintes spécifiques liées au fonctionnement et à l’environnement du système de l’avionique.
I.1- Généralité sur les sources d’énergies embarquées
Trois sources d’énergie coexistent actuellement dans les aéronefs : hydraulique, pneumatique et électrique. Ces trois sources d’énergie sont toutes obtenues à partir du réacteur. L’énergie primaire est donc fournie par la combustion du Kérosène et les autres sources citées constituent le secondaire.
Hydraulique : L’énergie hydraulique est fournie par une pompe hydraulique couplée
mécaniquement à l’arbre du réacteur. Les principales fonctions du circuit hydraulique sont l’actionnement des commandes de vol, le relevage du train d’atterrissage ainsi que le freinage.
Pneumatique : L’énergie pneumatique est obtenue par prélèvement d’air chaud sur les
étages haute et basse pression du réacteur. Les fonctions réalisées par le pneumatique sont principalement le conditionnement d’air de la cabine et du cockpit (climatisation et pressurisation) et le dégivrage des bords d’attaque des ailes. Le circuit d’air permet aussi le démarrage des réacteurs, mais cette fois l’alimentation se fait par l’APU « Auxiliary Power Unit ». L’APU est un générateur auxiliaire alimenté lui aussi par du kérosène. Il est essentiellement utilisé au sol avant le démarrage des réacteurs.
Electrique : L’énergie électrique est fournie par un alternateur entraîné mécaniquement par la rotation de l’arbre du réacteur. Les fonctions de l’énergie électrique sont nombreuses et variées et en perpétuelle augmentation.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
Ces sources d’énergie, dites de servitude, présentent des avantages et des inconvénients, énumérés dans le tableau I.1.
Avantages Inconvénients
Hydraulique Fort couple Fuite de Skydroll®
Tuyauterie importante Pneumatique Démarrage des réacteurs Prélèvement sur le réacteur Electrique Coût de maintenance
Gain de poids
Compatibilité Electromagnétique Possibilité d’existence des Décharges Partielles ou couronne.
Tableau 1.1 : Avantages et inconvénients des différentes sources d’énergie.
Les principaux inconvénients de l’hydraulique sont les risques de corrosion et d’incendie lors d’une fuite du liquide hydraulique : le Skydroll®. De plus, les prélèvements d’air effectués sur les réacteurs pour maintenir la pression dans le circuit pneumatique pénalisent le rendement du réacteur. Ainsi, Boeing annonce près de 35% de réduction de la puissance nécessaire par l’utilisation d’une architecture électrique à la place d’un système pneumatique. Le remplacement d’un système hydraulique ou pneumatique ainsi que toute la tuyauterie associée permet également d’envisager un gain de masse. Cependant les contraintes avioniques imposent une sécurité de fonctionnement et une disponibilité des équipements. Pour assurer ces contraintes, le gain en poids est difficile à estimer et dépend des choix technologiques. En effet, qui dit plus d’électricité embarquée, dit aussi davantage de câbles pour conduire le courant. On estime ainsi à plus de 500 kilomètres la longueur des câbles dans l’A380. Un des principaux avantages de l’électricité est la simplicité de la maintenance possible directement sur avion [Wei]. De plus l’électronique peut transmettre des informations sur l’état du système permettant des actions de maintenance avant apparition d’un défaut majeur. En réduisant ainsi les temps d’immobilisation de l’avion, le taux de disponibilité, qui est synonyme de rendement, augmente.
I.2 - Des avions de plus en plus électriques
D’une manière générale, l’électricité prend une place prépondérante dans le schéma énergétique des véhicules, notamment dans la distribution interne d’énergie. Les aéronefs n’échappent pas à cette tendance. Le besoin en puissance électrique est de plus en plus croissant comme l’illustre la figure I.1, ce qui pourrait entraîner l’abandon progressif de l’énergie hydraulique ou pneumatique à bord des aéronefs : c’est le concept de l’avion « tout
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 19
Figure I.1 : Evolution de la puissance électrique embarquée [S01]
Nous revenons brièvement dans les paragraphes suivants sur l’historique de cet envol de la puissance électrique embarquée dans les aéronefs.
I.2.1 - Historique de l’évolution de l’énergie électrique embarquée
Comme illustré sur la figure I.1, les chiffres parlent d’eux-mêmes. Depuis le début de l’histoire de l’aéronautique, les avions deviennent de plus en plus électriques. Dans les années 50, l'un des premiers avions civils "long courrier" (la caravelle SE 210, 80 passagers) consommait environ 27kW avec une distribution électrique de 28V en continu. A l’époque, l’ensemble des commandes étaient hydrauliques et mécaniques. Au début des années 70, Airbus commercialise l’A300 (260 passagers) et la consommation est de 250kW avec une distribution complètement revue. Le réseau principal est à 115V AC triphasé à 400Hz. Pourquoi ce choix ? La réponse est liée à la masse. La fréquence plus élevée que pour les réseaux électriques terrestres s’explique, entre autres, par le fait que la taille des matériaux magnétiques diminue quand la fréquence augmente. A cette époque, l’électricité n’est toutefois utilisée que pour l’instrumentation de vol. A la fin des années 80, l’A320 consomme 300kW, soit guère plus que son prédécesseur, mais il sonne le glas des anciennes commandes de vol. Dotés d’un système appelé « Fly by Wire », les volets sont toujours actionnés par pression hydraulique mais la commande est entièrement électrique. Le confort et le divertissement du passager prennent aussi une part non négligeable de la consommation électrique. Sécurisante et souple d’utilisation, cette nouvelle technologie sera appliquée par les autres avionneurs [Bon].
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
I .2.2 - Vers l’avion plus électrique : Génération et réseau de bord
L’architecture type d’un gros porteur (A330 par exemple, Figure I.2) est constituée de trois circuits hydrauliques (H1 à H3) et de deux alternateurs qui, connectés aux turbines (Engine + Gen) alimentent séparément un bus de 115V – 400Hz.
Figure I.2 : Architecture type du réseau électrique d’un biréacteur. Circuit hydraulique en
tirets [Lan]
L’ensemble des charges de forte puissance (commerciales ou techniques) est branché sur ce bus bar. Pour assurer la constance de la fréquence, un système électro-hydraulique permet de fixer une vitesse constante sur l’arbre de la machine (Constant Speed Drive). L’ensemble alternateur plus CSD constitue le générateur principal (Figure I.3) et est appelé IDG (Integrated Drive Generator). Une machine à aimants permanents PMG (Permanent Magnet
Generator) assure l’alimentation d’une excitatrice par le biais d’un ensemble redresseur plus
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 21 Dans certaines conditions, une source électrique auxiliaire, APU (Auxiliary Power Unit), souvent en queue d’avion, assure la génération d’air pour le démarrage des moteurs et le conditionnement de la cabine. Elle est principalement utilisée au sol [Ema]. Deux prises de parc (Ext A et B) permettent l’alimentation de l'avion quand celui-ci est à l’arrêt. Un transformateur redresseur (TR) assure la conversion entre le bus bar alternatif et continu (28VDC). C’est un système dodécaphasé qui facilite le filtrage des harmoniques de courant générées et de réduire les ondulations de tension en sortie [Bon]. Enfin, côté secours, des batteries branchées sur le bus bar DC assurent l’alimentation des organes de vol vitaux. De plus, une éolienne de secours, la RAT (Ram Air Turbine), permet à la fois de pressuriser un circuit hydraulique (H1) et d’assurer la fourniture électrique de ces mêmes organes via un alternateur de quelques kW (Constant Speed Motor / Generator). En ce qui concerne le circuit hydraulique, il en existe trois indépendants (H1, H2, et H3) dont la génération est assurée par des pompes. Chacun de ces circuits possède un accumulateur (non représenté sur la figure) qui permet d’absorber les variations de pression. Comme nous l’avions mentionné, l’un des circuits sert également de secours [Wei].
C’est l’A380 qui marque le plus l’histoire de l’aéronautique, par sa taille, ce qui nous importe peu dans le cadre de cette étude, mais surtout par son architecture qui se différencie nettement des précédentes et traduit le souhait de l’avionneur d’aller vers le « plus électrique ». Plusieurs évolutions importantes sont à noter. Tout d’abord, du point de vue de la puissance installée à bord, qui passe à 800kW avec quatre générateurs à fréquence variable de 200kW chacun [Lan]. L’un des trois circuits hydrauliques des architectures dites « 3H » est remplacé par un circuit électrique pour obtenir une architecture dite « 2H+2E». Le fait de n’avoir que deux circuits hydrauliques principaux et de remplacer le troisième circuit hydraulique classique par un secours électrique peut être un facteur de diminution de masse.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
Figure I.4 : Architecture 2H+2 E du réseau de l’A380 [Lan]
Le système de secours est toujours alimenté électriquement par une éolienne (RAT) fournissant suffisamment de puissance pour assurer les fonctions vitales. Cela a permis de supprimer des pompes hydrauliques et la tuyauterie associée entraînant un gain de masse non négligeable. La deuxième évolution est la suppression du système complexe et lourd d’entraînement à vitesse constante de l’alternateur alimentant le réseau AC. Le précédent système IDG devient VFG (pour Variable Frequency Generator) en s’affranchissant du système CSD. Cette modification a pour conséquence de revoir l’ensemble des charges électriques car la fréquence peut désormais varier entre 360 Hz et 800Hz. La tension est toujours régulée à 115V/200V.
Autre différence remarquable par rapport aux anciens produits Airbus, les fonctions jusque-là assurées par les vérins et machines hydrauliques sont remplacées par de nouveaux systèmes hybrides.
I.2.2.a - Nécessité d’un système Hybride : Electro-hydraulique
En dépit des avantages indéniables du système électrique, l’hydraulique conserve une place importante dans la conception des systèmes. Ainsi, on assiste à une utilisation accrue des architectures hybrides « électro-hydraulique » qui remplacent les systèmes entièrement
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
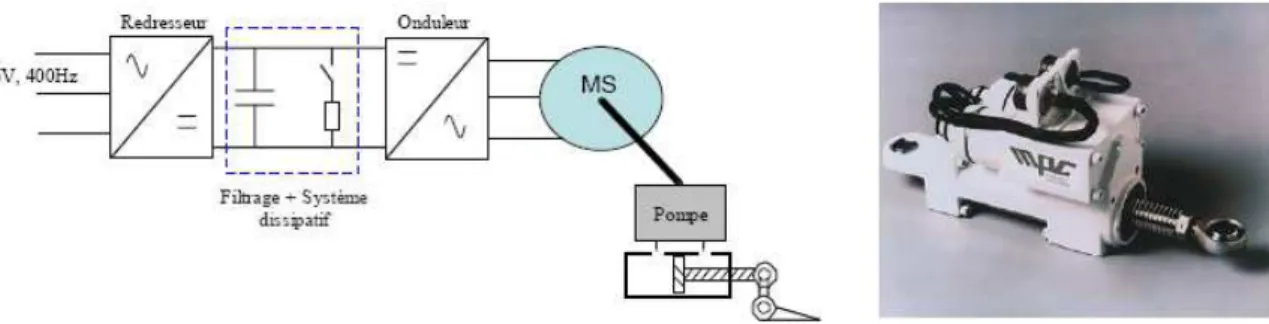
___________________________________________________________________________ 23 quantités importantes de fluide hydraulique, l'idée a consisté à générer localement l’énergie hydraulique nécessaire pour actionner tel ou tel système. En d’autres termes, le principe d’une génération de puissance hydraulique centralisée et commune à tous les systèmes est remplacé par des réseaux hydrauliques décentralisés, activés par l’intermédiaire d’une électropompe (ou micro-pompe), elle-même entraînée par un moteur électrique situé à proximité immédiate du système. Ainsi, les actionneurs hydrauliques sont remplacés par des nouveaux systèmes tels que les EHA (Electro-Hydrostatic Actuator) et EMA (Electro-Mechanical Actuator) qui représentent et plus d’un tiers des actionneurs à bord de l’avion (Figure I.5).
Figure I.5 : Schéma de principe d’un Actionneur Hydro Electrique (Electro-Hydrostatic
Actuator) et photo d’un Actionneur Electro Mécanique (Electro Mechanical Actuator)
La partie électrique de ces actionneurs est composée d’un étage d’entrée constitué d’un pont de diodes puis d’un onduleur de tension commandé en courant. Le niveau de tension du bus continu de chaque onduleur est de 270 VDC pour une puissance de plusieurs kilowatts.
Cette évolution, aussi remarquable soit-elle, est loin de son apogée. C’est ainsi que les avionneurs annoncent une nouvelle génération d’aéronefs : le Boeing 787 « dreamliner » et l’Airbus A350, qui ouvrent la voie vers le « tout électrique ».
I.2.3 - Evolutions futures : Vers le tout électrique et le plus composite
Les spécialistes s’accordent pour considérer l’avion tout électrique comme l’aéronef du futur [S02]. Le remplacement des systèmes hydrauliques par des dispositifs électriques permet en effet de répondre à un défi majeur : réduire encore et toujours les coûts d’exploitation des avions en simplifiant la maintenance.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
I.2.3.a - Le Frein électrique
Le développement du frein électrique est une véritable avancée technologique. Avec les freins électriques, les équipements hydrauliques sont remplacés par des boîtiers électroniques et les pistons hydrauliques par des actionneurs électro-mécaniques. Ainsi, lorsque le pilote freine, c’est un calculateur qui envoie l’information à un boîtier de commande, qui transforme l’information électrique en un effort électro-mécanique : les actionneurs placés sur la couronne de frein, qui remplacent les pistons hydrauliques, serrent alors les disques de carbone les uns contre les autres comme dans le freinage hydraulique traditionnel.
1. Moteur électrique 2. Réducteur à engrenage 3. Vis et écrou 4. Disque carbone rotor 5. Disque carbone stator
Figure I .6 : Schéma du principe du frein électrique [S03]
Le futur 787 dreamliner intègre des freins électriques développés par la société Messier-Bugatti [S03]. Le 787 est pourvu de huit roues principales. Chacun des freins est actionné par un système électronique nommé EBAC et disposé dans une baie avionique. Les actionneurs situés au niveau des roues sont alors reliés aux EBAC par des câbles de puissance dont la longueur est au moins égale à la longueur de la jambe du train d’atterrissage.
I.2.3.b - Mutualisation de l’électronique
Les différents systèmes électriques ne fonctionnent pas tous durant les mêmes phases de vol. Pour alléger les systèmes embarqués, plusieurs charges peuvent donc être alimentées par le même convertisseur. Si ces charges ne fonctionnent pas au même moment, le convertisseur est dimensionné pour la charge dont la puissance est la plus importante. Par exemple une même électronique pourra commander le train d’atterrissage et la direction quand l’appareil est au sol. L’inconvénient de cette structure est que si les charges ne sont pas toutes situées au
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 25 même emplacement, les convertisseurs devront alors alimenter les charges via des câbles de puissance plus ou moins longs. Ceci induit les phénomènes cités dans le tableau I.1.
I.2.3.c- Structure composite
Autrefois réservés essentiellement au domaine militaire, les matériaux composites structuraux s’émancipent de cette filiation et s’ouvrent au domaine civil [S02]. La structure des avions civils était jusqu’à très récemment entièrement métallique. Les qualités mécaniques des composites, en terme de résistance par rapport au poids de la structure, font pencher les avionneurs vers ce type de matériau. Boeing annonce 50% de composite pour le 787 alors qu’Airbus annonce 52% pour son nouvel A350 (ces chiffres sont fournis en pourcentage du poids total de l’avion). Ces matériaux sont composés de couches de fibres de carbone agglomérées dans une résine époxy permettant le maintien mécanique. Le nombre de couches utilisé dépend des caractéristiques mécaniques désirées. Une structure en métal conducteur, cuivre ou bronze, peut être ajoutée sur la peau du matériau composite notamment sur le fuselage. Cette partie métallique a été ajoutée pour conduire les courants engendrés par un impact foudre sur l’avion. Les propriétés électriques en terme de conductivité du matériau composite sont en effet très médiocres par rapport à l’aluminium. De plus ces propriétés ne sont pas isotropes. Dans la direction privilégiée, la conductivité du composite (données Airbus) est 60 fois moins importante que pour l’aluminium.
1.2.4 – Position du problème
La présentation décrite dans les paragraphes précédents illustre les progrès réalisés et traduit le besoin en puissance électrique. L’énergie électrique devra assurer désormais les fonctions principales de l’avion (Figure I.7).
Pour arriver à ces objectifs, le principal enjeu se situe autour de l’architecture du réseau elle-même. Il faut trouver l’architecture « optimale » qui permet d’inclure les nouveaux systèmes tout en garantissant leur fiabilité et leur disponibilité. En effet, les actionneurs tels que les EHA absorbent un courant très important pendant leur démarrage. Ils sont donc générateurs de perturbations pouvant entraîner des "creux" de tension sur le réseau à chaque déplacement d’une gouverne [Ema]. L’inconvénient de l’électricité par rapport à l’hydraulique est la difficulté à accumuler l’énergie électrique pour répondre aux variations brutales de puissance.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
Figure I.7 : Représentation des fonctions électriques futures
Comme nous l’avons mentionné précédemment, pour assurer l’alimentation des charges dont les puissances consommées sont de plus en plus importantes, l’augmentation du niveau de tension est envisagée. Ainsi, le bus principal passerait de 115V à 230V entre phase et neutre à fréquence variable (360-800Hz). Le passage d’une fréquence fixe (400Hz) à une fréquence variable pour l’alimentation des équipements électriques constitue une étape majeure. Cette variabilité de la fréquence est liée au régime du moteur qui va jusqu’à la valeur maximale de 850Hz. Elle permet de délivrer une tension dont la fréquence tient compte des variations de vitesse du moteur. Du coup, l’ensemble du système de câblage et les organes de distribution s’en trouvent simplifiés. Auparavant, quel que soit le régime du moteur, il fallait en effet accorder la tension produite sur une fréquence unique. La création d’un bus HVDC « High Voltage Direct Current » est aussi à l’étude. Le choix du niveau de tension retenu se fera entre 0- 540V et ±270V. L’avantage d’un bus HVDC est de réduire le dimensionnement des câbles pouvant entraîner une réduction de masse non négligeable. En effet, à puissance donnée l’augmentation de la tension entraîne une diminution dans les mêmes proportions du courant. Cependant, il existe plusieurs inconvénients. Outre le problème de la proportionnalité entre le niveau de tension du bus continu et les perturbations électromagnétiques [Gen], dans un environnement aussi sévère que l’aéronautique, le taux d’humidité, la pression et la température sont des grandeurs qui influencent l’initiation des DP. Ces phénomènes qui se produisent dans les gaz occlus ou environnant le SIE peuvent conduire à long terme au
Moteur + Générateur électrique Cœur électrique Commandes de vol Commandes de vol Commandes de vol Contrôle moteur Charges commerciales Train d’atterrissage Dégivrage
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 27 d’un certain niveau de tension, combiné aux contraintes liées à l’environnement de fonctionnement, la quasi-totalité des équipements de puissance (câbles, machines, autotransformateurs, module de puissances IGBT, …) sont assujettis à ce phénomène [Bil, Bo1, Co1, Le1]. Ainsi, nous exposons dans le paragraphe suivant les contraintes spécifiques au système aéronautique.
1.2.5 – Problématique industrielle
Du point de vue industriel, la fiabilité des équipements est entachée par l’apparition des DP dans les cas où, les matériaux isolants utilisés n’ont pas été élaborés en tenant compte de cet aspect. Ainsi, dans les hypothèses présentées, les entreprises partenaires de cette étude (Labinal, Hispano-Suiza, Technofan, Nexans et Thales) qui fournissent les équipements de la chaine de puissance électrique s’intéressent à ce phénomène du fait de la susceptibilité des DP sur leurs équipements. Ces entreprises, actrices notables dans l’amélioration du système électrique, ont, à des degrés différents un dénominateur commun, le système d’isolation électrique, maillon faible de la chaîne de puissance électrique et siège des DP. Les activités industrielles concernées par ce phénomène, varient selon les entreprises :
Labinal développe pour la distribution électrique, les systèmes de câblage et des harnais
moteur.
Hispano-suiza est spécialisé dans l’extraction et la gestion de la puissance au travers des
convertisseurs électroniques de puissance et de systèmes électriques.
Technofan est spécialisé dans les systèmes de ventilation. Ce sont les différentes phases
d’isolation dans une machine (entre spires, entre phase et de fond d’encoche) et des autotransformateurs.
Nexans, fabrique des câbles pour aéronautique utilisés dans la fabrications des harnais.
Thales AES développe des équipements électriques (générateurs, …) et systèmes
électroniques de puissance
Tous ces équipements, quelque soit la configuration du système d’isolation, sont assujettis aux phénomènes des DP si les conditions d’initiations sont réunies.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
I.3 – Fonctionnement et environnement aéronautique
I.3.1 – Identification des différentes contraintes spécifiques du système aéronautique.
Le bon fonctionnement du système électrique nécessite la connaissance des contraintes que le système doit subir tout en garantissant sa fiabilité. Ces contraintes sont de deux types :
I.3.1.a - Contraintes de fonctionnement
Ce sont les paramètres de fonctionnement électrique en mode normal ou anormal souvent répertoriés dans les normes (ABD0100 dans le cas de l’aéronautique) : nature et niveau de la tension, fréquence, courant,…
Dans le cadre de notre étude, nous nous intéressons au niveau de tension, principal paramètre d’initiation des décharges électriques dans l’environnement du système. Les tableaux I.2 et I.3 présentent les valeurs des tensions vues par l’isolant [Lab].
Régime Normal Régime Anormal
Sans pics Avec pics Sans pics
Stable Transitoire Stable Transitoire Stable Transitoire
115V Phase/Neutre 167 254 439 526 176 254 Entre phases 294 441 549 713 305 441 230V Phase/Neutre 334 508 878 1052 354 509 Entre phases 588 882 1098 1426 611 882
Tableau I.2 : Analyse des tensions en régime alternatif
Régime normal Régime Anormal Stable Transitoire Stable Transitoire
0 – 270
Phase/Neutre 280 330 290 350
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 29
Entrephase 560 660 580 700
Tableau I.3 : Analyse des tensions en régime continu (HVDC)
Ces valeurs résument les contraintes de tension sur le système d’isolation selon la configuration du réseau. Par exemple, dans le cas des câbles représentés sur la figure I.8, ce que nous avons noté Phase/Neutre peut concerner les câbles monofilaires (a) au contact d’un plan de masse (ou blindage) et l’Entre phases, les câbles bifilaires (b) pour les contraintes d’une différence de potentiel entre les âmes. La configuration dite de "l’entre phases" simule le cas d’un « harnais » dans lequel les câbles étant gainés ensemble, l’épaisseur d'isolant est donc plus importante du fait de leur juxtaposition.
a) câble monofilaire blindé b) câbles bifilaires
Figure I.8 : Schématisation des contraintes électriques sur l’isolation des câbles
La connaissance de ces valeurs permettra dans la suite de notre travail de les comparer avec les résultats de mesure des tensions de seuils d’initiation des DP dans les différents modes de fonctionnement. Ces modes de fonctionnement sont présentés dans la norme MIL-STD-704F [S05]. Les précisions sur la durée des différents modes de fonctionnement, dans les conditions de vol sont présentées en annexe1.
I.3.1.b - Contraintes environnementales
L’environnement aéronautique est caractérisé par la variation des paramètres atmosphériques liée d’une part au changement d’altitude et d’autre part à la localisation de l’équipement (température élevée à proximité des réacteurs). Ces paramètres se définissent comme suit :
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
b.1 - Température
Au niveau macroscopique, c’est une mesure de l’énergie cinétique (Ec = 3/2 kT), liée à la
vitesse moyenne d’une molécule, qui est fonction croissante du degré d’agitation thermique des particules. Dans l’environnement d’un avion, la température de l’air varie en fonction de la couche atmosphérique liée à l’altitude. Ainsi, la norme aéronautique DO160 prévoit « des susceptibilités » liées à la variation de la température en altitude (1ft ≈ 0.3m). Plusieurs procédures d’essais sont définies selon cette variation (figure I.9) pour caractériser les performances de l’équipement selon son utilisation et le profil de vol.
Figure I.9 : Variation de la température en environnement avion
b.2 - Pression
La pression atmosphérique est le poids d’une colonne d’air, qui s’étend sur une altitude donnée jusqu’au sommet de l’atmosphère, en un point quelconque de l’atmosphère. Ce poids s’applique sur tous les objets à la surface de la terre. La pression atmosphérique évolue avec l’altitude [Annexe2], plus précisément elle diminue, exponentiellement, d’un facteur 10 chaque fois que l’on s’élève de 16 km. Intuitivement, cette diminution s’explique par la raréfaction des particules d’air. Notons au passage que ce paramètre est utilisé pour mesurer l'altitude puisque le fonctionnement d’un altimètre repose sur ce principe.
b.3 Humidité
L’humidité de l’air atmosphérique est la quantité d’eau sous forme de vapeur, exprimée en
Altitude (ft)
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 31 d’humidité, on fait allusion au ‘taux d’humidité’ exprimé en % qui représente en fait l’humidité relative. La détermination de cette mesure est étroitement liée à d’autres grandeurs physiques, telles que la température et la pression. Le taux d’humidité dans un volume (V) d’air est généralement exprimé à partir d’un des trois paramètres suivants :
b.3.1 – L’humidité relative
On appelle pression de vapeur saturante Ps(T) , la valeur maximale que peut atteindre la
pression partielle Pv de la vapeur d’eau à la température T, une partie de cette vapeur se
condense (apparition d’eau liquide).
L’humidité relative s’exprime (en pourcentage) par la relation :
100 * ) ( (%) T P P HR s v = (1.1)
L’humidité relative ne donne pas directement la quantité de vapeur d’eau dans l’air, mais seulement un rapport entre l’état de l’air considéré et celui de l’air saturé à la même température et à la même pression. Le diagramme de Mollier[Annexe2] permet de faire correspondre à température et à taux d’humidité relative donnés, l’équivalent en humidité absolue.
b.3.2 – Le rapport du mélange
Noté r et exprimé en g/Kg , il exprime le rapport des masses Meau de vapeur d’eau et Mairsec
d’air sec à température constante. Cette grandeur est la référence en humidité. Elle exprime l’humidité absolue sec air eau M M r = (1.2) b.3.3 – La température de rosée
C’est la température à laquelle il faut refroidir, à pression constante, une masse M d’air humide pour atteindre la saturation. La connaissance de cette température permet de déterminer le taux d’humidité de l’air, ceci, grâce à l’utilisation de tables et de diagrammes.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
b.4 – Densité de l’air
L’humidité absolue et relative sont liées par la température et la pression partielle de la vapeur d’eau. Le diagramme ci-dessous (figure I.10) donne les relations liant les paramètres : humidité relative Hr, humidité absolue Ha, les pressions partielles de l’eau Pe et de l’air Pa, la masse de l’eau me, la pression P et le volume V de l’air humide.
Fig. I.10 : Diagramme de relation liant les paramètres atmosphériques [Zeb]
où Ra est la constante des gaz parfaits, et θ la température du gaz exprimée en °C. L’indice s
indique que le paramètre correspond à la saturation. Le diagramme démontre que les deux manières de représenter le taux d’humidité peuvent être converties de l’une à l’autre. Le paramètre le plus important dans leur liaison est la température. La densité de l’air δ est ainsi définie par la pression P et la température θ :
+ =
θ
δ
273 293 760 P (1.3) δ = 1 pour θ = 20°C et P = 760 mmHg définies comme conditions normales de température et de pression (CNTP) [Atk, Pee].Dans l’étude de la capacité d’isolation de l’air, l’humidité est un paramètre caractéristique de la tenue en tension notamment en ce qui concerne l’initiation des décharges couronnes au
Densité de l’air + = θ δ 273 293 760 P Pression de l’air e L P P P = + Température θ (°C) Humidité absolue V m R T P H e a e r = = 1 Pression partielle de l’eau Pe Pression partielle de l’air PL Pression de la vapeur Pes Humidité relative as a es e r H H P P H = =
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 33
b.5 - Conditions d’humidité en fonction de l’altitude
En fonction de l’altitude (z ; en mètre), la quantité d’eau rapportée à la quantité d’air sec qui la contient et exprimée en g/kg est définie par l’équation :
( )
z b z ca
r = × ln 2 + ×ln + (1.4)
a, b et c étant des paramètres dépendant du type de mission : polaire, tropicale,… Le tableau
I.4 issu des données Airbus donne les valeurs de ces paramètres.
Type de Mission a b c
Polar Mission (PM) -3,115.10-3 -1,556.10-2 0,4245
Tropical Mission ™ -4,320.10-1 1,855 20,20
Allowable Maximum Hot Day (AMHD) -3,969.10-2 6,189.10-2 2,9107 Structural Maximum Hot Day (SMHD) -4,612.10-2 1,770.10-1 2,3954
Standard Day (SD) -4,732.10-2 1,2570.10-1 5,2870
Tableau I.4 - Valeurs des paramètres de profil de mission
La variation de l’humidité en fonction de l’altitude extrapolée dans la figure I.11 dépendra donc du type de mission.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
b.6 - Variation des paramètres atmosphérique en environnement avion
Le fonctionnement des systèmes électriques à bord des aéronefs est soumis à d’incessantes variations des paramètres atmosphériques liées, d’une part à l’altitude et, d’autre part, à la localisation du système dans l’avion. Ainsi, comme le montre le tableau I.4, les normes définissent des « zonning » pour identifier les contraintes environnementales en fonction de la situation des équipements [ABD].
Tableau I.5 : Valeurs récapitulatives des variations des paramètres atmosphériques en
fonction de leur zonning
Le tableau I.5 donne les valeurs de températures ambiantes dans les différentes zones de l’avion. La localisation de ces zones sur avion est présentée sur la figure I.12. Ainsi, l’APU placé dans la queue de l'avion (le "tail cone"), "voit" une température de 120°C. D’autres composants (harnais,…) de puissance à proximité du réacteur sont soumis à des températures avoisinant 180°C.
Les zones, dites « pressurisées » (pression constante), concernent le fuselage qui comporte la cabine des passagers, le cockpit et les soutes. Les autres zones dites « non pressurisées» varient en fonction des conditions extérieures et donc de l’altitude.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
___________________________________________________________________________ 35
Figure I.12: Schématisation des différentes zones dans un aéronef.
Les développements récents permettent d'envisager une évolution à court terme vers l’Avion
Tout Electrique. Toutefois, la particularité de l’environnement avionique peut constituer une
limite pour l’utilisation de la puissance électrique notamment en ce qui concerne le niveau de tension. Nous avons donc identifié les contraintes spécifiques à cet environnement et qui sont susceptibles d’influencer la tension d’initiation des décharges. Dans la suite, tout en rappelant les théories physiques de la décharge, nous tenterons dans un premier temps de caractériser expérimentalement l’impact de la variation des paramètres atmosphériques sur la phénoménologie des décharges électriques. Ensuite, nous déterminerons les conditions dans lesquelles ces décharges sont susceptibles de se produire dans les équipements embarqués via la détection de leurs tensions seuils dans des conditions environnementales différentes.
I- Envol de la Puissance Electrique Embarquée ___________________________________________________________________________
Chapitre II :
PHENOMENOLOGIE & MESURES
DES DECHARGES PARTIELLES
II- Phénoménologie & Mesures des Décharges Partielles ___________________________________________________________________________
II- Phénoménologie & Mesures des Décharges Partielles ___________________________________________________________________________
___________________________________________________________________________ 39
II.1 - Décharges électriques dans les gaz : Le Plasma
Les plasmas sont désignés comme étant le quatrième état de la matière faisant suite dans l’échelle des températures aux trois états classiques : solide, liquide et gazeux. Le terme de « plasma » (du grec « matière informe ») a été introduit la première fois en 1923 par les physiciens américains I. Langmuir et L. Tonks pour désigner dans les tubes à décharge [Bro, Nas, Del], certaines régions équipotentielles contenant un gaz ionisé électriquement neutre. Ainsi, un plasma est défini comme un gaz constitué de particules chargées, d’ions et d’électrons mais tel que l’ensemble reste globalement électriquement neutre. Les plasmas constituent un vaste domaine de la physique qui a suscité un vif intérêt en vue d’application aussi bien dans l’industrie (torche à plasma, traitement de surface, gravure,…) que dans la vie quotidienne (téléviseur à écran plasma). Par contre, dans le cadre de notre étude, un plasma est indésirable au voisinage du Système d’Isolation Electrique (SIE) du fait de sa nocivité. Nous présentons brièvement dans cette partie une revue sur les paramètres physiques responsables de l’initiation d’une décharge ainsi que la théorie qui gouverne ce phénomène et l’utilisation de la caractérisation des décharges électriques « partielles » (DP) comme technique de diagnostic du SIE.
II.1.1 - Bref rappel de la théorie des gaz
A l’équilibre, et en l’absence de forces extérieures, un gaz est constitué d’un ensemble de particules uniformément réparties, dont la vitesse n’a aucune direction privilégiée (distribution isotrope). L’énergie de chaque particule peut être stockée sous différentes formes, énergie de translation dans le cas d’un atome, énergie de rotation et de vibration dans le cas d’une molécule [Jan].
Dans le cas simple d’un atome en translation, son énergie est définie à partir des composantes cartésiennes de la vitesse et est égale à :
kT mv 2 3 2 1 2 = (2.1) Où :
v : est la vitesse quadratique moyenne de la particule
T : la température thermodynamique
k : la constante de Boltzmann (k =1,38.1023J/K)