Analyse et justification de la sécurité de systèmes robotiques en interaction physique avec l’humain
152
0
0
Texte intégral
Figure

+7
Outline
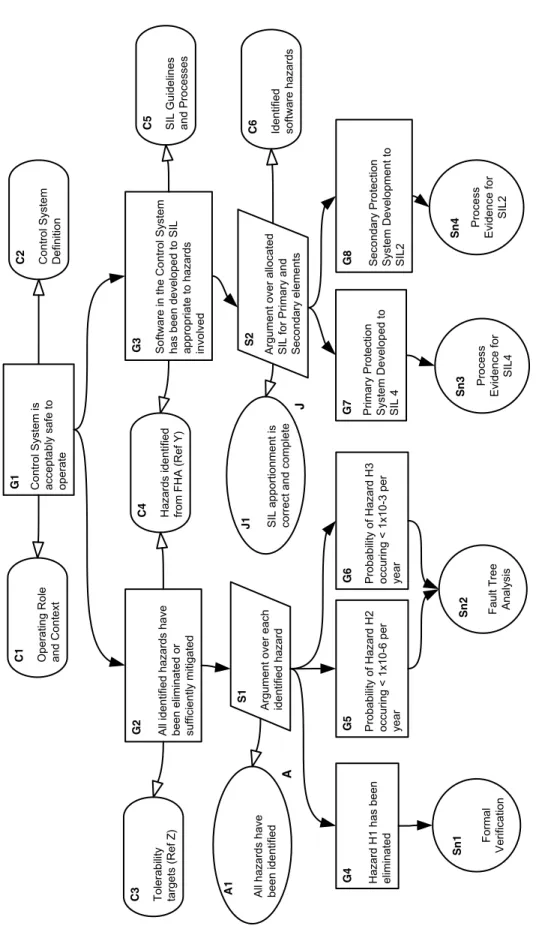
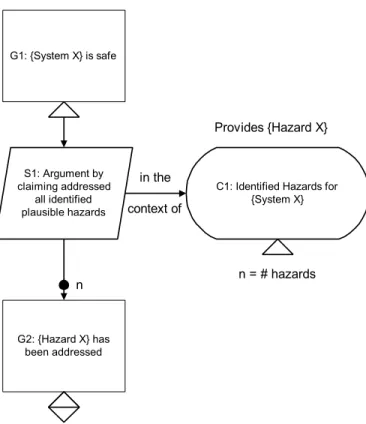
Argumentaire de sécurité
Approches qualitatives
Approche quantitative : théorie de Dempster-Shafer
Vers une nouvelle approche d’évaluation de la confiance d’un argumentaire
Les fonctionnalités du robot d’aide à la déambulation
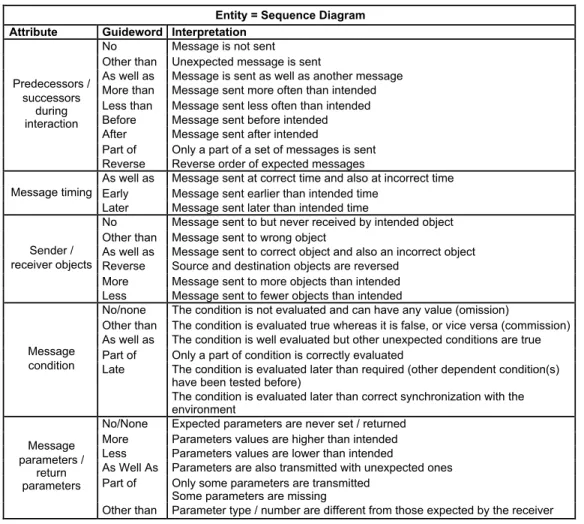
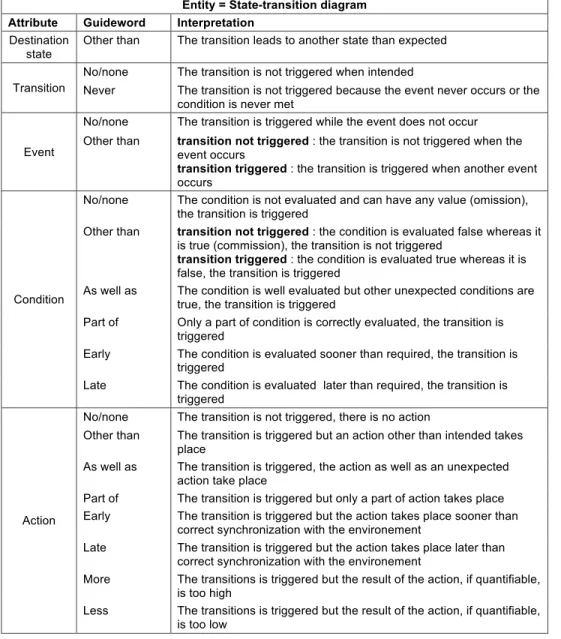
Validation de l’approche HAZOP-UML
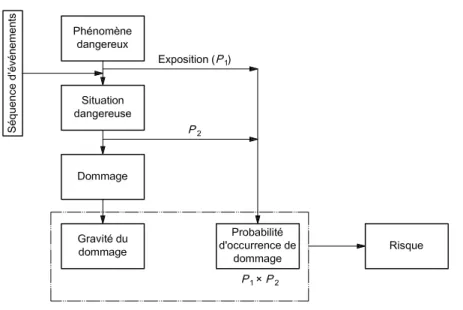
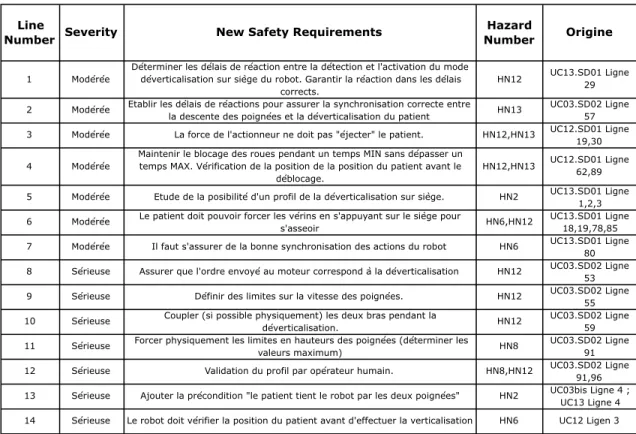
Critères de risque
Argumentaire de sécurité du robot
Étude de la sensibilité de la confiance
Documents relatifs