UNIVERSITE TOULOUSE III PAUL SABATIER SHERBROOKE UI.F.R. P.C.A. LA FACULTE DE GENIE DE L'UNIVERSITÉ DE THESE EN COTUTELLE
Pour obtenir le grade de PHILISOPHIAE DOCTOR (Ph.D.)
Spécialité : Génie civil
Thèse présentée et soutenue par Rani HAMROUCHE Le 23 novembre 2011
RECONNAISSANCE GEOMETRIQUE DES STRUCTURES EN MAÇONNERIE OU EN BETON PAR IMAGERIE RADAR MULTI-RÉCEPTEURS : APPROCHE NUMÉRIQUE ET
EXPÉRIMENTALE
Directeurs de thèse
Jean-Paul BALAYSSAC, Gérard BALLIVY
Jury français: G. Arliguie, examinatrice E. Antczak, rapporteur J.-P. Balayssac, examinateur X. Ferrières, Examinateur V. Garnier, rapporteur G. Klysz, examinateur J. Salin, examinateur Jury québécois
G. Ballivy, directeur, Université de Sherbrooke J. Rhazi, codirecteur, Université de Sherbrooke J.-F. Lataste, examinateur externe, U. Bordeaux 1 P. Rivard, rapporteur, Université de Sherbrooke
Published Héritage
Branch Direction du Patrimoine de l'édition 395 Wellington Street Ottawa ON K1A0N4 Canada 395, rue Wellington Ottawa ON K1A 0N4 Canada
Your file Votre référence ISBN: 978-0-494-89698-3 Our file Notre référence ISBN: 978-0-494-89698-3
NOTICE:
The author has granted a
non-exclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by
télécommunication or on the Internet, loan, distrbute and sell theses
worldwide, for commercial or non-commercial purposes, in microform, paper, electronic and/or any other formats.
AVIS:
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par télécommunication ou par l'Internet, prêter, distribuer et vendre des thèses partout dans le monde, à des fins commerciales ou autres, sur support microforme, papier, électronique et/ou autres formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
L'auteur conserve la propriété du droit d'auteur et des droits moraux qui protégé cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement
reproduits sans son autorisation.
In compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
Conformément à la loi canadienne sur la protection de la vie privée, quelques
formulaires secondaires ont été enlevés de cette thèse.
Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
AUTEUR : Rani HAMROUCHE
TITRE : Reconnaissance géométrique des structures en maçonnerie ou en béton par imagerie radar multi récepteurs : approche numérique et expérimentale
DIRECTEURS DE THESE : Jean-Paul BALAYSSAC, Gérard BALLIVY LIEU ET DATE DE SOUTENANCE : Université Toulouse III - Paul Sabatier
le 23 novembre 2011 RESUME :
Dans un contexte économique très contraignant, les gestionnaires de patrimoines bâtis sont désireux d'évaluer leurs structures afin de connaître, d'une part l'état de l'ouvrage vis-à-vis de sa sécurité et d'autre part d'évaluer les besoins d'entretien. Parmi les pathologies structurelles les plus répandues dans les ouvrages anciens en maçonnerie, on trouve la présence de vides à l'intérieur des maçonneries et plus particulièrement les défauts de jointoiement. L'objectif de ce travail de recherche est d'utiliser la technologie radar afin d'accroître la précision de cette technique en matière de reconnaissance géométrique des structures maçonnées et plus particulièrement la détection de défauts de jointoiement.
Un algorithme d'imagerie inspiré des méthodes de migration, basé sur une acquisition multi-récepteurs, a été développé. Pour pouvoir mettre en œuvre cette méthode, des améliorations dans l'exploitation des données radar, comme la détermination de l'instant d'émission, inaccessible pour les systèmes radar classiques, ont été nécessaires. Le développement de l'algorithme a été fait à partir d'expérimentations numériques sur des milieux simulés intégrant diverses dimensions de défauts de jointoiement. Une étude de sensibilité a également été proposée.
L'algorithme d'imagerie a enfin été testé sur différentes structures en maçonnerie et son efficacité pour détecter des vides de faibles dimensions (défauts de jointoiement, conduits enfouis) a été démontrée. La détermination de la vitesse de propagation des ondes dans le milieu combinée à l'exploitation de la phase des échos enregistrés a permis de localiser précisément et d'identifier partiellement les différentes interfaces de la structure auscultée. MOTS-CLES : Contrôle non destructif, radar, maçonnerie, imagerie, migration.
DISCIPLINE ADMINISTRATIVE :
Docteur de l'Université Toulouse III - Paul Sabatier, spécialité : Génie Civil Ph.D de l'Université de Sherbrooke - Sherbrooke, Qc, Ca, spécialité : Génie Civil INTITULE ET ADRESSE DU LABORATOIRE :
Laboratoire Matériaux et Durabilité des Constructions (LMDC), INSA-UPS, 135 Avenue de Rangueil, 31077 TOULOUSE cedex 4
Groupe de Recherche sur l'Auscultation et l'Instrumentation (GRAI) / Chaire CRSNG-Industrie sur l'auscultation des structures de béton,
TITLE : Géométrie récognition of masonry or concrete structures using multi-receiver radar imaging : experimental and numerical approach
DIRECTORS : Jean-Paul BALAYSSAC, Gérard BALLIVY
PLACE AND DATE OF DISSERTATION : Paul Sabatier University Toulouse III 23 November 2011
ABSTRACT:
In a very restrictive economic context, the built héritage managers are eager to evaluate their structures in order to know there security state and also assess the need for maintenance. Among the most common structural disorders in old masonry structures, we find the presence of voids within the masonry and especially deep unfilled joint defects. The objective of this research is to use radar technology to increase the accuracy of this technique in recognizing géométrie masonry structures and particularly the détection of deep unfilled joint defects. An imaging algorithm inspired from migration methods and based on a multi-receiver acquisition was developed. To implement this method, improvement in the use of radar data, such as determining the émission time, inaccessible to conventional radar system were needed. The development of the algorithm was made from numerical experiments on simulated environments integrating various dimensions of unfilled joint defects. A sensitivity study has also been proposed.
The imaging algorithm was finally tested on real masonry structures and the effectiveness in detecting small-sized voids (deep unfilled joint defects, buried pipes) was demonstrated. The détermination of wave velocity in the médium combined to the exploitation of phase in the recorded echoes allowed to precisely locate and partially identify the différent interfaces of the monitored structure.
KE Y-WORD S : Contrôle non destructif, radar, maçonnerie, imagerie, migration. SPECIALITY :
Doctor of Paul Sabatier University - Toulouse III, speciality : Civil Engineering Ph.D of Sherbrooke University - Sherbrooke, Qc, Ca, speciality : Civil Engineering LABORATORY ADRESS :
Laboratoire Matériaux et Durabilité des Constructions (LMDC),
INSA-UPS, 135 Avenue de Rangueil, 31077 TOULOUSE cedex 4 France
Groupe de Recherche sur l'Auscultation et l'Instrumentation (GRAI) / Chaire CRSNG-Industrie sur l'auscultation des structures de béton,
\
A mon f>èw Hocw tfamrou&le..,
\
A ma mère Ojcmi^a Hamroucke,,.
Cestpr-àce a Mas (jaeJen sa/s fd a<y>ouf<lloi.,.
C'est à vous <ja.e Je dédie ce modeste traMjf,,,
Rani {fciMroa.ùke
C£r^~ ô>\
J
ojJ\
\j& Jb\\<S3
d>\) iTi/"
Ce travail de recherche a été réalisé au sein du Laboratoire Matériaux et Durabilité des Constructions (LMDC), INSA-UPS Toulouse, France. Ainsi que le Groupe de Recherche sur l'Auscultation et l'Instrumentation (GRAI) de l'Université de Sherbrooke, Québec, Canada. Il s'inscrit dans le cadre d'une cotutelle entre l'Université Paul Sabatier (Toulouse, France) et l'Université de Sherbrooke (Sherbrooke, Qc, Canada) et faisait partie d'un projet financé par la Région Midi-Pyrénées et l'Université de Sherbrooke. C'est dans ce contexte que j'ai pu bénéficier d'une allocation de recherche.
En premier lieu, je tiens à remercier Mme Ginette Arliguie, directrice du LMDC au moment où j'ai entamé cette thèse, de m'avoir accueilli au sein du laboratoire et d'avoir présidé mon jury de thèse. Qu'elle trouve ici toute ma reconnaissance. Je tiens aussi à remercier M. Gérard BALLIVY, directeur de thèse, de m'avoir accueilli au sein du GRAI, ce qui m'a permis de vivre l'expérience enrichissante de la recherche au Canada.
Je voudrais particulièrement exprimer ma plus profonde reconnaissance à M. Jean-Paul BALAYSSAC et M. Gilles KLYSZ pour avoir dirigé mon travail de thèse. Si ce travail a pu être mené, c'est grâce à leurs conseils pour mes recherches ainsi que leur soutien dans les moments difficiles tout au long de ce travail. Je ne les remercierai jamais assez pour leurs qualités humaines, M. Gilles KLYSZ toujours disponible, avec une bonne humeur toujours au rendez-vous, M. Jean-Paul BALAYSSAC pour sa bienveillance et sa générosité exceptionnelle. Tous deux d'une patience rare. C'était pour moi une grande chance d'avoir travaillé avec eux.
Je remercie également M. Jamal. RHAZI qui m'a encadré durant mon séjour à l'université de Sherbrooke, avec qui j'ai pu appréhender la dimension industrielle des techniques NDT, et ce grâce au grand nombre d'auscultations que j'ai pu effectuer sur des structures réelles.
Je remercie sincèrement M. Emmanuel Antczak et M. Vincent GARNIER d'avoir acceptés de rapporter ce travail de recherche ainsi que pour l'intérêt qu'ils ont porté à mon travail.
Je remercie également M. Xavier FERRIERES et M. Jean SALIN d'avoir accepté d'examiner ce travail de recherche et de m'avoir fait part de leurs remarques constructives.
Je tiens à remercier également tous les chercheurs ou anciens chercheurs du LMDC avec en particulier et par ordre alphabétique Abdel, Jean-Claude, Laurent, Makani, Nordine, Rachida, Sifaques, Thomas, Vincent, Wahid... Que les membres techniques Bernard ATTARD et Danick CHARBONNEAU trouvent toute ma gratitude pour leurs disponibilités, leurs conseils et leurs aides.
Un grand merci aux membres de ma famille notamment mes parents, ma sœur Ahlem et ma tante Cherifa pour leur soutien et leur encouragement ainsi qu'une pensée à mes frères en Algérie Bassem et Maissane. A Mélody, celle qui était présente au quotidien autant dans les moments de joie que dans les moments les plus pénibles et qui n'a cessé de me soutenir et de m'encourager. J'en profite aussi pour remercier Didier et Yvelines LE LOUARNE, parents de Mélody pour leur soutien moral continu. Aux vieux compagnons de galère comme j'aime les appeler et par ordre alphabétique Farouk Belgacem, Alain De Marignan, Alexis Hotton, Messaoud Nacer Bey, Seid SOUALAH ainsi qu'à ceux que j'ai laissés en Algérie où ailleurs dont la liste est trop longue pour les citer ici, mais qui se reconnaitront.
Table des matières
Table des matières 1
Liste des figures 7
Liste des tableaux 17
Principales notations 19
I. Introduction générale 23
1.1 Problématique générale 23
1.2 Cadre d'étude 24
1.3 Objectifs et plan de la thèse 25
II. Les maçonneries et leur évaluation par les contrôles non destructifs 27
II. 1 Introduction 27
II.2 Les constructions en maçonnerie 28
11.2.1 Matériaux utilisés dans les structures maçonnées 28
11.2.1.1 Les briques 28
11.2.1.2 Les pierres 29
11.2.1.3 Le mortier 29
11.2.2 Appareillages des constructions en maçonneries 30
11.2.3 Conclusion 31
II. 3 Pathologies structurelles des constructions maçonnées 32
11.3.1 Détérioration des briques 32
11.3.2 Détérioration des pierres 33
11.3.3 Détérioration du mortier 33
II. 3.4 Conclusion 33
II.4 Techniques non destructives appliquées aux structures en maçonnerie 34
2 Table des matières 11.4.1 Techniques acoustiques 34 11.4.1.1 Essai sonique 34 11.4.1.2 Impact-écho 36 11.4.1.3 Tomographie 39 11.4.2 Thermographie infrarouge 42 11.4.3 Technique radar 44 11.4.4 Conclusion 49
III, Méthodes radar et techniques de traitement 51
III. 1 Notions sur la propagation des ondes électromagnétiques 52
III. 1.1 Propriétés électromagnétiques des matériaux 52
III. 1.1.1 Milieu diélectrique, polarisation, courant de déplacement 52
III. 1.1.2 Milieu diélectrique à perte 55
III. 1.1.3 Conductivité complexe et densité totale de courant 55
III. 1.1.4 Notions de perméabilité magnétique 58
III. 1.2 Équations de propagation des ondes électromagnétiques 59 III. 1.3 Atténuation de propagation des ondes électromagnétiques 62 III. 1.4 Vitesse de propagation des ondes électromagnétiques 65 III. 1.5 Réflexion des ondes EM à l'interface de deux milieux 66
in
.2 Description du GPR (de type impulsionnel) 70111.2.1 Historique 70
111.2.2 Principe 70
in.2.3
Limites de détection72
III.3 Traitement et analyse des signaux 76
111.3.1 Traitement en mode A-scan 76
111.3.2 Migration des données 80
in
.3.2.1 Migration de KirchhofF 81III.3.2.2 Migration avant sommation en profondeur (pre-stack depth migration). 83 IH.3.2.3 Migration par retournement temporel (Reverse-time migration) 84 111.3.2.4 Principe de la méthode SAR (Radar à ouverture de synthèse) 85
111.3.2.5 Migration F-K 87
III.4 Conclusion 88
IV. Imagerie radar des structures en maçonnerie 89
IV. 1 Introduction 89
IV.2 Simulation de la propagation des ondes EM dans les structures maçonnées 89
IV.2.1 Présentation du code de simulation 89
IV.2.2 Caractérisation EM des matériaux 90
IV.3 Simulation de la propagation EM en milieu homogène et hétérogène 93
IV.3.1 Milieu homogène 94
IV.3.2 Milieu hétérogène 97
IV.4 Technique d'imagerie proposée 100
IV.4.1 Principe fondamental de la technique d'imagerie proposée 100
IV.4.2 Validation numérique 106
IV.4.3 Algorithme avec prise en compte de plusieurs émetteurs 112 IV.4.4 Algorithme avec prise en compte de plusieurs émetteurs et correction de la vitesse 119
IV.4.5 Traitement appliqué aux fenêtres temporelles 123
IV.4.5.1 Pondération des fenêtres temporelles 123
IV.4.5.2 Exploitation de la phase dans les fenêtres temporelles 128
IV.4.6 Conclusion 134
IV.5 Études numériques de sensibilité à la détection de l'algorithme 135
IV.5.1 Limites de détection en profondeur 135
IV.5.2 Résolution de détection (Dimension minimale détectable) 143
4 Table des matières IV.5.3 Résolution de détection horizontale (distance horizontale minimale détectable)
149
IV.5.4 Résolution de détection verticale (distance verticale minimale détectable).. 159
IV.6 Conclusion 162
V. Validation expérimentale 163
V.l Introduction 163
V.2 Acquisitions GPR en laboratoire 164
V.2.1 Acquisition au sein du GRAI (Université de Sherbrooke) 164
V.2.1.1 Paramètres d'acquisition et de traitement 164
V.2.1.2 Présentation des défauts et résultats 166
V.2.1.3 Conclusion 178
V.2.2 Mesures sur une maquette de maçonnerie de briques 179
V.2.2.1 Présentation de la structure auscultée 179
V.2.2.2 Paramètres d'acquisition 180
V.2.2.3 Résultats obtenus avant et après traitement 181
V.2.2.4 Conclusion 185
V.3 Acquisitions GPR sur ouvrages 187
V.3.1 Acquisition au palais de justice de Salaberry-de-Valleyfïeld (Québec-Canada) 187
V.3.1.1 Présentation de la structure auscultée 187
V.3.1.2 Paramètres d'acquisition 188
V.3.1.3 Résultats obtenus avant et après traitement 190
V.3.1.4 Conclusion 194
V.3.2 Acquisition sur un pont en maçonnerie de briques à Cazères (région
Midi-Pyrénées-France) 195
V.3.2.1 Présentation de la structure auscultée 195
V.3.2.2 Paramètres d'acquisition 198
V.3.2.3 Résultats obtenus 199
V.3.2.4 Conclusion 203
VI. Conclusions et perspectives 205
VI. 1 Contexte et objectifs 205
VI.2 Aptitude de l'algorithme d'imagerie à l'exploration des structures en maçonnerie
206
VI.3 Perspectives 207
VII. Bibliographie 209
VIII. Annexes 215
Vm. 1 Sommation des images (matrices) construite à chaque position d'émetteur 215 VIII.2 Résultats obtenus avant et après traitement au palais de justice de
Salaberry-de-Valleyfïeld (Québec-Canada) 219
VIII.3 Résultats obtenus avant et après traitement sur un pont en maçonnerie de briques
à Cazères (région Midi-Pyrénées-France) 230
7
Liste des figures
Figure II.2.1 Exemples d'appareillages en maçonnerie de briques (a) et de pierres (b) 31 Figure II.3.1 Influence de l'environnement, de la qualité des matériaux et de la structure sur
les mécanismes de détérioration [11] 32
Figure II.4.1 Modes de transmission pour l'essai sonique (a) direct, (b) semi direct, (c)
indirect 35
Figure II.4.2 Essai sonique appliqué à un mur en maçonnerie de pierres pour le contrôle de l'efficacité de l'injection et comparaison des résultats avant et après l'intervention (les couleurs sombres indiquent les plus grandes vitesses) [14] 36
Figure II.4.3 Configuration de l'essai d'impact-écho [15] 36
Figure II.4.4 Spectre des fréquences obtenu sur un mur en maçonnerie de pierres [16] 37 Figure II.4.5 Classification d'un contrefort en maçonnerie de pierre à partir des résultats de
l'impact écho [16] 38
Figure II.4.6 : Exemple de chemin des rais soniques et des signaux obtenues [18] 39 Figure II.4.7 Image de tomographie acoustique (pont de Middleton) [5] 40 Figure II.4.8 Zone de faibles vitesses indiquant des zones endommagées [20] 41 Figure II.4.9 a) mur en maçonnerie de briques avec des vides d'air, b) tomographie issue des données ultrasons, c) tomographie issue des données radar [22] 42 Figure II.4.10 Image thermique d'une structure en maçonnerie [26] 43 Figure II.4.11 a) Image de la structure auscultée, b) Image thermique prise immédiatement
après le coucher du soleil [28] 44
Figure II.4.12 a) passage de l'antenne sur la surface de la structure b) B-scan obtenu lors de
l'acquisition [29] 45
Figure II.4.13 B-scan obtenu sur une structure en maçonnerie de pierres [32] 46 Figure II.4.14 a) vue en plan du vide d'air, b) B-scan obtenu par le passage d'une antenne
900 MHz sur la surface de la structure [30] 47
Figure II.4.15 B-scan obtenu avec une antenne de fréquence central 1,5 GHz sur deux murs de
maçonnerie accolé à un mur en béton [33] 48
Figure II.4.16 B-scan obtenu avec une antenne de 250 MHz sur un pont en maçonnerie de
pierres [34] 49
Figure III. 1.1 Propagation d'une onde électromagnétique plane 60 Figure III. 1.2 Vecteur d'onde réfléchie et transmise d'une onde incidente à l'interface de deux
milieux diélectriques 67
Figure III.2.1 Antenne dipolaire de type papillon 71
Figure III.2.2 Principe du radar a impulsions 72
Figure III.2.3 Résolution verticale Ar et horizontale Al à une profondeur h 73 Figure III.2.4 (a) les échos sont clairement définis avec T>W (b) les échos sont perceptibles
jusqu'à T=W (c) les échos sont indiscernables T<W 74
Figure III.2.5 Résolution verticale en fonction £r pour différentes bandes passantes de
GPR [46] 75
Figure III.3.1 Coordonnées des acquisitions A-scan, B-scan et C-scan 77 Figure III.3.2 Application du filtre Dewow sur un signal GPR brut 78
Figure III.3.3 Principe de base de la migration 81
Figure III.3.4 Ondes enregistrées générées par la source secondaire de Huygens donnant ainsi
la forme hyperbolique 82
Figure III.3.5 Principe de migration de Kirchhoff (l'amplitude d'entrée en B sur l'hyperbole
est déplacée dans le profil de sortie au point A) 82
Figure III.3.6 Courbe isochrone dans un milieu homogène 84
Figure III.3.7 Focalisation par retournement temporel 85
Figure IV.2.1 Dispositif de mesure pour la caractérisation électromagnétique des briques.... 91 Figure IV.2.2 Corrélation de deux signaux (simulé et mesuré) sur brique avec une distance
émetteur-récepteur de 23,9 cm 92
Figure IV.3.1 Vide de joint parallèle à la surface de mesure 94 Figure IV.3.2 Évolution de l'onde EM dans le mur « homogène » 95
Liste des figures 9 Figure IV.3.3 Signal enregistré par le récepteur lors de l'émission au-dessus du défaut dans le
cas d'un mur « homogène » 96
Figure IV.3.4 B-scan enregistré lors du passage émetteur récepteur le long du mur
« homogène » 97
Figure IV.3.5 Évolution de l'onde EM dans le mur « hétérogène » 98 Figure IV.3.6 Signal enregistré par le récepteur lors de l'émission au-dessus du défaut dans le
cas du mur « hétérogène » 99
Figure IV.3.7 B-scan enregistré lors du passage émetteur récepteur le long du mur
\
« hétérogène » 99
Figure IV.4.1 a) Signaux enregistrés, b) Régression linéaire sur les points reliant distance et
temps d'arrivée 102
Figure IV.4.2 Trajets linéaire émetteur-point-récepteur 103
Figure IV.4.3 Illustration du fenêtrage temporel (point réellement réflecteur) 104 Figure IV.4.4 Illustration du fenêtrage temporel (point non réflecteur) 105
Figure IV.4.5 B-scan du milieu homogène sans défaut 107
Figure IV.4.6 B-scan du milieu homogène avec défaut 107
Figure IV.4.7 Image fournie par l'algorithme (milieu sans défaut) 108 Figure IV.4.8 Image fournie par l'algorithme (milieu avec défaut) 108 Figure IV.4.9 B-scan d'un milieu hétérogène (milieu sans défaut) 109 Figure IV.4.10 B-scan d'un milieu hétérogène (milieu avec défaut) 110 Figure IV.4.11 Image fournie par l'algorithme (milieu sans défaut) 111 Figure IV.4.12 Image fournie par l'algorithme (milieu avec défaut) 111 Figure IV.4.13 B-scan d'un milieu homogène (milieu sans défaut) 113 Figure IV.4.14 B-scan d'un milieu homogène (milieu avec défaut) 114 Figure IV.4.15 Image fournie par l'algorithme (milieu sans défaut) 115 Figure IV.4.16 Image fournie par l'algorithme (milieu avec défaut) 115 Figure IV.4.17 B-scan d'un milieu hétérogène (milieu sans défaut) 116
Figure IV.4.18 B-scan d'un milieu hétérogène (milieu avec défaut) 116 Figure IV.4.19 Image fournie par l'algorithme (milieu hétérogène sans défaut) 117 Figure IV.4.20 Image fournie par l'algorithme (milieu hétérogène avec défaut) 117 Figure IV.4.21 Image après retraitement par l'algorithme pour le milieu avec défaut 118 Figure IV.4.22 Signaux réels à la bonne position en utilisant la vitesse réelle 119 Figure 1V.4.23 Signaux réels reçus pour une mauvaise position ou une vitesse incorrecte.. 120 Figure IV.4.24 Résultat retraité par l'algorithme avec correction de vitesse 122 Figure IV.4.25 Image fournie par l'algorithme sans pondération (milieu homogène) 124 Figure IV.4.26 Image fournie par l'algorithme avec une valeur de pondération=2 (milieu
homogène) 125
Figure IV.4.27 Image fournie par l'algorithme avec une valeur de pondération=5 (milieu
homogène) 125
Figure IV.4.28 Image fournie par l'algorithme sans pondération (milieu hétérogène) 126 Figure IV.4.29 Image fournie par l'algorithme avec une valeur de pondération=2 (milieu
hétérogène) 127
Figure IV.4.30 Image fournie par l'algorithme avec une valeur de pondération=5 (milieu
hétérogène) 127
Figure IV.4.31 Image fourme par l'algorithme impliquant que la phase négative (milieu
homogène) 129
Figure IV.4.32 Image fournie par l'algorithme conservant la phase positive (milieu
homogène) 130
Figure IV.4.33 Image fournie par l'algorithme impliquant que la phase négative (milieu
hétérogène) 131
Figure IV.4.34 Enchevêtrement de l'onde au niveau de l'interface de mortier 132 Figure IV.4.35 Image fournie par l'algorithme impliquant que la phase positive (milieu
hétérogène) 133
Figure IV.4.36 Image fournie par l'algorithme impliquant que la phase positive et négative
(milieu hétérogène) 134
Liste des figures 11 Figure IV.5.1 Position du défaut dans le mur simulé (à gauche défaut horizontal, à droite
défaut vertical) 136
Figure IV.5.2 B-scan du mur homogène avec défaut horizontal à 58 cm de profondeur 137 Figure IV.5.3 Traitement par l'algorithme du mur homogène avec défaut horizontal à 58 cm
de profondeur 137
Figure IV.5.4 B-scan du mur homogène avec défaut vertical à 74 cm de profondeur 138 Figure IV.5.5 Traitement par l'algorithme du mur homogène avec défaut vertical à 74 cm de
profondeur 138
Figure IV.5.6 Position du défaut dans le mur simulé 139
Figure IV.5.7 B-scan du mur hétérogène avec défaut horizontal à 58 cm de profondeur 140 Figure IV.5.8 Traitement par l'algorithme du mur hétérogène avec défaut horizontal à 58 cm
de profondeur 140
Figure IV.5.9 B-scan du mur hétérogène avec défaut vertical à 44 cm de profondeur 141 Figure IV.5.10 Traitement par l'algorithme du mur hétérogène avec défaut vertical à 44 cm de
profondeur 141
Figure IV.5.11 B-scan du mur hétérogène avec défaut vertical à 74 cm de profondeur 142 Figure IV.5.12 Traitement par l'algorithme du mur hétérogène avec défaut vertical à 74 cm de
profondeur 142
Figure IV.5.13 B-scan du mur homogène avec un défaut (2><2 cm) à 28 cm de profondeur. 144 Figure IV.5.14 Traitement par l'algorithme du mur homogène avec un défaut (2X2 cm) à
28 cm de profondeur 144
Figure IV.5.15 B-scan du mur homogène avec un défaut (0,5><0,5 cm) à 28 cm de profondeur 145 Figure IV.5.16 Traitement par l'algorithme du mur homogène avec un défaut (0,5x0,5 cm) à
28 cm de profondeur 145
Figure IV.5.17 B-scan du mur hétérogène avec un défaut (2x2 cm) à 28 cm de profondeur 146 Figure IV.5.18 Traitement par l'algorithme du mur hétérogène avec un défaut (2x2 cm) à
28 cm de profondeur 146
Figure IV.5.19 B-scan du mur hétérogène avec un défaut (0,5x0,5 cm) à 28 cm de profondeur 147 Figure IV.5.20 Traitement par l'algorithme du mur hétérogène avec un défaut (0,5><0,5 cm) à
28 cm de profondeur 147
Figure IV.5.21 B-scan du mur hétérogène avec un défaut vertical (2x5 cm) à 22 cm de
profondeur 148
Figure IV.5.22 Traitement par l'algorithme du mur hétérogène avec un défaut vertical
(2x5 cm) à 22 cm de profondeur 148
Figure IV.5.23 B-scan du mur homogène avec deux défauts espacés de 20 cm 150 Figure IV.5.24 Traitement par l'algorithme du mur homogène avec deux défauts espacés de
20 cm 150
Figure IV.5.25 B-scan du mur homogène avec deux défauts espacés de 10 cm 151 Figure IV.5.26 Traitement par l'algorithme du mur homogène avec deux défauts espacés de
10cm 151
Figure IV.5.27 B-scan du mur homogène avec deux défauts espacés de 5 cm 152 Figure IV.5.28 Traitement par l'algorithme du mur homogène avec deux défauts espacés de
5 cm 152
Figure IV.5.29 B-scan du mur homogène avec deux défauts espacés de 1 cm 153 Figure IV.5.30 Traitement par l'algorithme du mur homogène avec deux défauts espacés de
1 cm 153
Figure IV.5.31 B-scan du mur hétérogène avec deux défauts espacés de 20 cm 154 Figure IV.5.32 Traitement par l'algorithme du mur hétérogène avec deux défauts espacés de
20 cm 155
Figure IV.5.33 B-scan du mur hétérogène avec deux défauts espacés de 10 cm 156 Figure IV.5.34 Traitement par l'algorithme du mur hétérogène avec deux défauts espacés de
10 cm 156
Figure IV.5.35 B-scan du mur hétérogène avec deux défauts espacés de 5 cm 157 Figure IV.5.36 Traitement par l'algorithme du mur hétérogène avec deux défauts espacés de
5 cm 157
Liste des figures 13 Figure IV.5.37 B-scan du mur hétérogène avec deux défauts espacés de 1 cm 158 Figure IV.5.38 Traitement par l'algorithme du mur hétérogène avec deux défauts espacés de
1 cm 158
Figure IV.5.39 B-scan du mur homogène avec deux défauts espacés de 30 cm 160 Figure IV.5.40 Traitement par l'algorithme du mur homogène avec deux défauts espacés de
30 cm 160
Figure IV.5.41 B-scan du mur hétérogène avec deux défauts espacés de 30 cm 161 Figure IV.5.42 Traitement par l'algorithme du mur hétérogène avec deux défauts espacés de
30 cm 161
Figure V.2.1 Images prises avant (gauche) et après (droite) le coulage de la dalle en béton 164
Figure V.2.2 Exemple de scan pris sur le défaut 1 165
Figure V.2.3 Illustration et positionnement du défaut 1 (dimensions en mm) 166 Figure V.2.4 Illustration et positionnement du défaut 2 (dimensions en mm) 167 Figure V.2.5 Illustration et et positionnement du défaut 3 (dimensions en mm) 167
Figure V.2.6 B-scan pour le défaut 1 168
Figure V.2.7 Défaut 1 résultats du traitement (a) avec phase positive (b) avec phase négative 169
Figure V.2.8 B-scan pour le défaut 2 170
Figure V.2.9 Défaut 2 : résultats du traitement (a) avec phase positive (b) avec phase négative 171
Figure V.2.10 B-scan pour le défaut 3 172
Figure V.2.11 Défaut 3 : résultats du traitement (a) avec phase positive (b) avec phase
négative 173
Figure V.2.12 Illustrations et positionnement du défaut 4 (dimensions en mm) 175
Figure V.2.13 B-scan pour le défaut 4 176
Figure V.2.14 Défaut 4: résultats du traitement (a) avec phase positive (b) avec phase
négative 177
Figure V.2.15 (a) Vue de face du mur avec position des différents défauts, (b) Vue de dessus avec position des différents défauts, (c) Images du mur en cours de construction 179 Figure V.2.16 Vues des défauts Al (a) et B1 (b) lors de la construction 180
Figure V.2.17 B-scan pour le défaut Al 181
Figure V.2.18 Résultat du traitement avec phase négative (défaut Al) 182
Figure V.2.19 B-scan pour le défaut A2 183
Figure V.2.20 Résultat du traitement avec phase négative (défaut A2) 183
Figure V.2.21 B-scan pour le défaut B1 184
Figure V.2.22 Résultat du traitement avec phase négative (défaut Bl) 185 Figure V.3.1 (a) Image prise lors de l'acquisition, (b) Gros plan sur la maçonnerie de pierres
qui constitue la façade 188
Figure V.3.2 (a) Face Sud de l'édifice (b) Face Nord de l'édifice 188 Figure V.3.3 Position des lignes d'acquisitions sur la façade 1 190 Figure V.3.4 Ligne 1 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 191
Figure V.3.5 Ligne 1 : résultats du traitement (a) avec phase négative (b) avec phase positive 193 Figure V.3.6 a) Vu d'ensemble Pont de la Hourride b) intrados de la voûte 1 195 Figure V.3.7 Élévation aval du pont et coupe longitudinale [89] [90] 196
Figure V.3.8 Plan de la voûte [91] 196
Figure V.3.9 Lignes d'acquisition GPR sur la voûte n° 1 (vue en plan) 198 Figure V.3.10 Ligne 1 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 200
Figure V.3.11 Ligne 1 : (a) Résultat du traitement avec phase négative (b) Résultat du
traitement avec phase positive 202
Figure VIII. 1.1 Sommation des images (matrices) construite à chaque position d'émetteur 216 Figure VIII. 1.2 Aperçu de la sommation : a) 8 premières matrice b) i matrice intermédiaire
c) 8 dernières matrices 217
Liste des figures 15 Figure Vffl.2.1(a) Face Sud de l'édifice (b) Face Nord de l'édifice 219 Figure VIII.2.2 Position des lignes d'acquisitions sur la façade 1 219 Figure VIII.2.3 ligne 2 (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 220
Figure VII1.2.4 Ligne 3 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 221
Figure VIII.2.5 Position des lignes d'acquisitions sur la façade 2 222 Figure VIII.2.6 Ligne 4 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 223
Figure VIII.2.7 Ligne 5 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 224
Figure VIII.2.8 Ligne 6 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 225
Figure VIII.2.9 Position des lignes d'acquisitions sur la façade 3 226 Figure VII1.2.10 Ligne 7 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 227
Figure VIII.2.11 Ligne 8 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 228
Figure VIII.2.12 Ligne 9 : (a) B-scan obtenu (b) Résultat du traitement sans exploitation de la
phase 229
Figure Vffl.3.1 Vu d'ensemble Pont de la Hourride 230
Figure VIII.3.2 Lignes d'acquisition GPR sur la voûte n° 1 (vue en plan) 230 Figure VIII.3.3 Ligne 2 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 231 Figure VIII.3.4 Ligne 3 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 232 Figure VIII.3.5 Ligne 4 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 233 Figure VIII.3.6 Ligne 5 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 234 Figure VIII.3.7 Ligne 6 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 235 Figure VIII.3.8 Ligne 7 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 236
Figure VIII.3.9 Ligne 8 : (a) B-scan obtenu (b) Résultat du traitement avec phase négative 237
17
Liste des tableaux
Tableau IV.2-1 Composition du mortier 92
Tableau IV.6-1 Limites de détection de l'algorithme d'imagerie 162
Principales notations
Unités A Ampère C Coulomb F Farad H Henry m mètre S Siemens s seconde T Tesla V Volt W Watt Q Ohm Constantesc Vitesse de la lumière dans le vide ou dans l'air ( = j = 3.108 [m/s]) V Mo^o
10"9
e0 Permittivité diélectrique du vide ou de l'air ( = = 8,854.10"12 [F/m])
3Ô7T
/u0 Perméabilité magnétique du vide ou de l'air ( = An. 10"7 [H/m])
i2= - 1
e = 2,718
20 Principales notations
Grandeurs vectorielles
B Champ magnétique [Tesla] D Déplacement électrique [As/m2] Ë Champ électrique [V/m]
H Excitation magnétique [A/m]
M Aimantation ou moment magnétique par unité de volume [A/m] P Polarisation électrique [C/m2].
j Densité de courant [A/m2]
k Vecteur d'ondes
Grandeurs scalaires
a Coefficient d ' atténuation P Constante de propagation
y Constante de propagation complexe (/ = « + //?) s Permittivité diélectrique absolue [F/m]
£r Permittivité diélectrique relative [sans dimension]
e* Permittivité diélectrique effective complexe
S t tt
Er" Permittivité diélectrique relative complexe ( = -J— = sr - isr )
£o s'r Constante diélectrique s" Facteur de perte 9i Angle d'incidence 9r Angle de réflexion
A
Longueur d'onde (à Perméabilité magnétique [H/m]jur Perméabilité magnétique relative [sans dimension]
v Mobilité du porteur de charge
p Densité de charges [C/m3]
pp Densité de charge de polarisation [C/m3]
<y Conductivité électrique
»
a* Conductivité effective complexe ( s* = )
iû) <p Phase
X Susceptibilité diélectrique du milieu considéré
Xm Susceptibilité magnétique [sans dimension]
(ù Pulsation co = 2rtf
f Fréquence
fc Fréquence centrale d'une antenne
1 = Courant électrique
n Nombre d'ions par unité de volume
Pp La profondeur de pénétration d'une onde électromagnétique
q La charge £ r = —^ Coefficient de réflexion E0I E0 t = —- Coefficient de transmission £o, t Temps T Période temporelle v Vitesse de propagation
22 Principales notations Vy Vitesse de phase
IM
Z, Impédance électromagnétique du milieu i ( = — ) V Ei Opérateurs div Divergence [m"1] rot Rotationnel [m'1] grâd Gradiant [m"1] A Laplacien [m"2] ô
— Dérivé par rapport au temps [s"1]
Cigles et abréviations
EM ElectroMagnétique CND Contrôle Non Destructif CSG Common Shot Gather
FDTD Finite Différence Time Domain GPR Ground Penetrating Radar
OPPM Onde Plane Progressive Monochromatique RADAR RAdio Détection And Ranging
WARR Wide Angle Reflexion Refraction
I.
Introduction générale
1.1 Problématique générale
La préservation du patrimoine bâti historique et sa mise en valeur sont des besoins qui ne cessent de s'accentuer pour des raisons socio-économiques et culturelles. C'est une préoccupation majeure des gouvernements Français et Québécois qui y consacrent des ressources importantes depuis de nombreuses années. En France, l'inventaire des ponts par type [1] fait état de 33 types de ponts (au total 24 856 ponts), dont les ponts voûtés en maçonnerie (4577 ponts), suivis par les ponts-cadre en béton armé (3974 ponts) puis les ponts dalle ou dalle nervurée en béton précontraint (3560 ponts). Le pourcentage des ponts en maçonnerie non évalués est passé de 4 à 21 % entre 1996 et 2005, soit 5 fois plus en moins de 10 ans. Au Québec, en vertu de la Loi sur les biens culturels [2] [3], 595 bâtiments sont protégés au titre de monuments historiques et près de 10 000 immeubles sont inclus dans des arrondissements et des sites historiques.
Dans ce contexte, il existe donc un besoin pressant d'évaluation de ces structures afin de connaître, d'une part l'état de l'ouvrage vis-à-vis de sa sécurité et d'autre part d'évaluer les besoins d'entretien en collectant in situ les informations nécessaires à l'identification d'endommagement mécanique, de pathologie établie, de risque pathologique, des caractéristiques géométriques... etc.
Une des difficultés majeures concernant l'évaluation de l'état des anciennes structures maçonnées est le manque, voire l'inexistence, d'informations, de plans de fabrication ou encore de connaissance des techniques de construction utilisées, sans oublier les éventuelles restaurations ou reconstructions partielles que ces structures ont subies tout le long de leur vie. Cette difficulté est majorée dans le cas des monuments protégés où l'utilisation des techniques de contrôle qui risqueraient d'altérer la structure est restreinte et même parfois interdite. Dans ce contexte, l'utilisation des techniques d'évaluation non destructive est incontournable.
24 Chapitre I : Introduction générale
1.2 Cadre d'étude
Les travaux de cette thèse ont été réalisés dans le cadre d'une cotutelle entre l'Université Paul Sabatier (Toulouse, France) et l'Université de Sherbrooke (Sherbrooke, Qc, Canada). Ils s'intègrent dans le cadre d'une collaboration franco-canadienne dans le domaine du contrôle non destructif des ouvrages de Génie Civil entre le Laboratoire Matériaux et Durabilité des Constructions, (LMDC INSA-Université Paul Sabatier, Toulouse) France et le Groupe de Recherche sur l'Auscultation et l'Instrumentation (GRAI, Sherbrooke, Québec, Canada) dans le cadre de la chaire CRSNG-Industrie sur l'auscultation des structures de béton piloté par M. le Professeur Gérard Ballivy.
En France ces travaux faisaient partie d'un projet soutenu par la Région Midi-Pyrénées de juillet 2007 à juillet 2011, dans le cadre des « appels à projets recherche et transfert de technologie (APRTT) ». Le projet, piloté au LMDC par Mme le Professeur Ginette Arliguie, s'intitulait « Auscultation du patrimoine bâti historique ». Il associait le LMDC, le GRAI, l'ONERA de Toulouse et deux PME de la région toulousaine, la société GETEC et l'entreprise Arkogéos. Il visait au développement de méthodes non destructives pour une meilleure évaluation du patrimoine bâti ancien de Midi-Pyrénées. Le périmètre du projet n'était pas limité aux ouvrages d'art mais était également étendu aux bâtiments remarquables et édifices religieux. Le patrimoine visé dans ce projet était relatif aux édifices construits en maçonneries de briques, très courantes en région Midi-Pyrénées et plus particulièrement dans le Midi Toulousain. La problématique pourrait toutefois être étendue sans difficulté aux maçonneries de pierres. Le doctorat ayant démarré en même temps que le projet, nous avons mis à profit les premiers mois pour établir un état de l'art, à la fois sur les besoins en matière de pathologies et de dysfonctionnement des ouvrages anciens en maçonnerie, mais aussi sur les pratiques existantes en France et à l'étranger dans l'utilisation des méthodes non destructives dans ce contexte. Nous avons rencontré des spécialistes d'ouvrages anciens (Service Départemental de l'Architecture et du Patrimoine et Architecte des Bâtiments de France) qui nous ont fait part de leurs besoins pour les édifices remarquables dont ils avaient la charge. La société GETEC, spécialisée dans le diagnostic des ouvrages d'art, nous a renseigné sur l'état actuel des ponts de la région Midi-Pyrénées et sur les besoins en auscultation non destructive. Le besoin essentiel exprimé par l'ensemble de nos interlocuteurs, commun à tous types d'ouvrages, concernait la recherche de vides invisibles à l'intérieur des maçonneries (murs, piles, contreforts, voûtes,...). Au cœur de cette
problématique, nous avons pu identifier une préoccupation plus spécifique aux ouvrages d'art, la recherche de vides dans les jointoiements, essentiellement dans les maçonneries de briques. Ces défauts de jointoiement sont de petite taille (inférieure à la longueur d'onde des moyens d'auscultation les plus courants) et peuvent être à des profondeurs importantes. Ils ont pour conséquence un dysfonctionnement mécanique de la structure et également un risque de pénétration d'agents agressifs dans la maçonnerie par l'infiltration des eaux de ruissellement. Il est important de bien évaluer le volume et la position de ces vides afin, d'une part de mieux appréhender l'étendue d'une réparation et d'autre part de s'assurer que celle-ci a été correctement réalisée.
1.3 Objectifs et plan de la thèse
L'objectif principal de la thèse vise donc à accroître la précision de la technologie radar en matière de reconnaissance géométrique appliquée aux structures maçonnées pour la détection de défauts de jointoiement. Pour y parvenir, différents concepts ont été exploités simultanément en particulier :
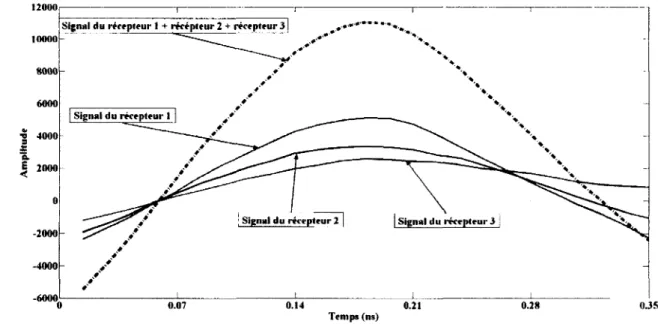
l'acquisition avec plusieurs positions de récepteurs pour chaque position d'émetteur. Ce mode d'acquisition appelé common shot gather (CSG) est fréquemment utilisé en géophysique pour l'imagerie sismique. Il permet de déterminer la vitesse de propagation ainsi que de remonter au temps d'émission de l'onde électromagnétique qui n'est pas connu pour les systèmes radar.
Le développement d'un algorithme de reconstruction d'image inspiré des techniques de migration issues de la géophysique et dont le but est de refocaliser les ondes difïractées sur l'objet difïractant.
Outre ce premier chapitre introductif, dans le chapitre 2 nous présentons l'historique et les principes constructifs des ouvrages en maçonnerie, les matériaux qui les constituent ainsi que les pathologies auxquelles ils sont sujets. Enfin, nous abordons les principales techniques appliquées au contrôle des structures en maçonnerie.
Dans le chapitre 3, nous présentons un rappel des bases de l'électromagnétisme avant de détailler le fonctionnement et les limites du GPR. Enfin, nous décrivons les traitements et les analyses les plus répandus et appliqués aux données de l'auscultation radar.
Dans le quatrième chapitre, nous procédons à des simulations numériques de propagations d'ondes électromagnétiques afin de générer des signaux pour développer un algorithme
26 Chapitre I : Introduction générale d'imagerie. Ces simulations sont menées pour un milieu hétérogène, censé représenté une structure en maçonnerie, ainsi que pour un milieu homogène qui servira de référence et permettra de mieux comprendre et interpréter les résultats obtenus grâce à l'algorithme d'imagerie développé. Cet algorithme vise à reconstituer une image de la structure auscultée permettant d'identifier la taille et la position des défauts recherchés. Son architecture de base s'appuie sur le principe des techniques de migration, auquel nous avons apporté une série d'améliorations nécessaires afin d'optimiser le diagnostic. Pour finir, afin de mieux connaître la résolution de la technique d'imagerie proposée, nous terminons ce chapitre par une étude numérique de sensibilité à la détection, qui permet de définir de façon théorique les limites de l'algorithme.
Le cinquième et dernier chapitre est consacré à la validation expérimentale. Le traitement d'imagerie est appliqué à des signaux réels obtenus en laboratoire puis in situ. Ceci permet de constater les avantages que peut apporter l'algorithme d'imagerie proposé par rapport aux traitements habituels, ainsi que ses limites réelles. Les difficultés rencontrées pendant les mesures et leurs incidences sur la qualité de l'imagerie sont également évoquées.
II.
Les maçonneries et leur évaluation par les
contrôles non destructifs
II. 1 Introduction
La maçonnerie est depuis l'antiquité l'art de bâtir une construction par l'assemblage de matériaux élémentaires qui sont généralement des briques ou des pierres, liées avec du mortier. Il existe une large variété d'applications de la maçonnerie :
les murs,
les arches, dômes et les voûtes, les poutres et colonnes.
Les structures en maçonnerie sont généralement des constructions très durables. Cependant, certains paramètres comme les matériaux utilisés, la qualité de leurs fabrications et l'appareillage, c'est-à-dire la façon dont les unités de briques ou de pierres sont assemblées, peuvent influer considérablement sur la durabilité de la construction en maçonnerie. Il est donc particulièrement nécessaire de contrôler et d'évaluer ces structures afin d'assurer leur sauvegarde.
Les techniques de contrôle non destructif des structures maçonnées sont globalement les mêmes que celles utilisées pour les structures en béton [4], les objectifs étant identiques à savoir définir la géométrie de la structure, détecter de potentiels défauts (fissures ou interfaces internes), estimer le taux d'humidité et de salinité, un ensemble d'indicateurs primordiaux pour le maitre d'ouvrage afin de prendre les dispositions adaptées à d'éventuelles restaurations de l'édifice [4] [5].
28 Chapitre H : Les maçonneries et leur évaluation par les contrôles non destructifs
II.2 Les constructions en maçonnerie
II.2.1 Matériaux utilisés dans les structures maçonnées
Les variétés des matériaux utilisés dans les structures maçonnées sont aussi diverses que les régions dans lesquelles ils sont utilisés, ce qui fait qu'il n'y a pas de modèle type de brique ou de pierre vis-à-vis de leurs dimensions ou de leur composition. Ceci est d'autant plus vrai pour l'appareillage des briques ou pierres. Pour cette raison, nous allons procéder à une description assez sommaire des principaux matériaux utilisés dans la construction des structures en maçonnerie.
II.2.1.1 Les briques
Elles sont produites à partir d'argile naturelle, de limon ou du mélange des deux [6]. On rencontre deux catégories de briques qui sont les briques crues (durcies naturellement) et les briques cuites (durcies artificiellement). Leurs caractéristiques physiques essentielles sont :
l'homogénéité de composition et de structure ; la régularité des formes et des dimensions ;
la porosité qui varie de quelques pour cent à plus de 50 % ;
la densité qui varie de 1,36 pour les briques de qualité inférieure à 2,2 pour les briques exceptionnelles [7].
Quant aux caractéristiques mécaniques elles peuvent être définies ainsi :
la résistance à la compression simple qui varie de 6 à 70 MPa pour les briques exceptionnelles [7],
la résistance à la traction simple est négligée, - le module de Young qui varie de 5 à 25 GPa [7].
A noter que ces caractéristiques sont très variables suivant l'origine de la matière première et la méthode de fabrication des briques. De même pour les dimensions des briques où il existe une très grande diversité. Pour notre étude nous utiliserons des briques de type foraines spécifiques à la région Midi-Pyrénées. Ces briques ont des dimensions inchangées depuis le 18e"1' siècle, soit 28x40 cm soit 30x42 cm avec une épaisseur allant de 4,5 à 5 cm. Cette
grande surface confère à la brique une meilleure liaison et une plus grande stabilité à l'intérieur de la maçonnerie. La fabrication de la brique dans le midi toulousain se fait suivant les étapes suivantes :
extraction de l'argile en automne pour le stockage tout le long de l'hiver,
- préparation de la pâte au printemps, qui consiste au broyage, addition d'eau et d'éléments dits dégraissants comme le sable, indispensable pour diminuer le retrait lors du séchage et de la cuisson quand les terres sont trop fines,
- façonnage, consistant à mettre la pâte dans des moules ou des cadres en bois avec ou sans fond, ces moules étant préalablement sablés pour éviter l'adhérence, ce qui va donner un aspect rugueux aux briques,
séchage à l'air libre pour éviter que les briques n'éclatent lors de la cuisson,
la cuisson, qui dure généralement 3 jours suivie d'une semaine pour que les briques refroidissent.
11.2.1.2 Les pierres
On peut citer ici deux grandes catégories, les pierres de taille et les moellons. Les pierres de taille sont des éléments de grande dimension, de hauteur d'assise allant de 0,25 m à 0,60 m, de largeur comprise entre 1,5 et 2 fois la hauteur. Elles sont utilisées dans les parties nobles (résistance et/ou esthétique). Concernant les moellons, ils peuvent être bruts ou partiellement taillés. Ils sont utilisés autant pour le remplissage que pour la construction et leurs dimensions sont très variables. Les propriétés de la pierre dépendent directement de sa nature qui va du calcaire ordinaire (très faible résistance à la compression) au quartzite (très forte résistance à la compression) [7] [8].
11.2.1.3 Le mortier
Le mortier est un mélange de liant (chaux ou ciment) et de sable, additionné d'une quantité d'eau suffisante pour constituer une pâte plus ou moins plastique, apte à remplir les joints en maçonnerie. Il a pour mission principale d'assurer, d'une part l'adhérence vis-à-vis de la brique et d'autre part une cohésion interne importante, ainsi il constitue la phase continue de l'assemblage qui assure le monolithisme de la maçonnerie [8]. Les propriétés mécaniques et physiques du mortier doivent être proches de celles de la brique afin d'éviter l'altération rapide soit du mortier soit de la brique. En revanche la capacité capillaire du mortier doit être supérieure à celle de la brique, car il devra jouer le rôle de drain qui élimine l'eau absorbée par les briques.
30 Chapitre II : Les maçonneries et leur évaluation par les contrôles non destructifs On peut distinguer trois types de mortier [7] [8]:
- à base de chaux (aérienne ou hydraulique), à base de ciment,
- bâtards (mélange de ciment et de chaux).
II.2.2 Appareillages des constructions en maçonneries
L'appareillage correspond à la façon d'assembler des briques ou des pierres pour former la construction en maçonnerie. Il existe une très grande variété de maçonneries en raison du nombre de matériaux utilisés : pierres naturelles, briques crues ou en terre cuite trouée ou non trouée, blocs de béton (agglomérés), mortiers de chaux ou de ciments ainsi que de dispositions possibles dans le plan des murs (appareils) ou dans l'épaisseur [8] [9]. Dans la Figure II.2.1 on peut voir quelques exemples d'appareillages en maçonnerie de briques et de pierres.
(a)
Appareil en parmeresses « ssaaa ta»» issu *»«* «a»MiBBIMiBMa -a
à la française
.• r-. "• ; ,
"TT ira
" • 'i' 1: ,• ;.! >.Y-M . ni, ài: ..
. :\y.ï-'-y m** W ;V':; • KH n v \ ; ; . r-:'; «v- .• ?.v SKi ?;vt *<•:• : v" »* 2;,* i«7 >- r" '* s-.;.:' h.:; - k-,< v?:v:- '• v ! ft •= • • "• 'i -• ->•-!-Tf • •''! r ' D*.:» •"« »•-. : v •' ••-s- ï> ; -, •: i""' ' " ' -, 'r 4 • S; î ' ' • v." s Appareil enboutisse
m v&< mi m> amjmim m m *'ts «aOfl OOuolliii Kg ??*? ws* %»|3ï§fÉ m& ta#
niw h» «ffiSMraMtMtt&MftiRK. »&$&«»»<»•• w®e«i'>«iE«ïii@ifô3«isa»ae8»E®aiSia9iii!i* ^ m s^. «* IMP ?ws IR,ï a» «s è>> «•« «s »Si
ui i»? m m m m m «as «w s? t» «s t t4 mM m mm* m m >m m m t» m* m >mu mi m m- mit m sê!B mt mb *& tm m mi m
m mm m mmsm Sur champ
t
4.-. .• .- • '! .1 -r-.. '• " •" ..-^r ! : t\Vr:,,v . ;N:t>.••=';• -. -. -. " ; • • -r.-:* -, » J S b_.. • ' . - • i-- - j - --r '•;•>« ;«: •>•?.. ®>a' • r . ":-r- ' ; 'i •' ïà:','i
à claire-voie t? Rii » M «Si? mi £5i! m fiffij ï: b m tM® m im m M M p. naai r.
» un M m ms, PW Mf-TRADITIONNEL.
A DOUBLE ÉPAISSEUR
A SIMPLE ÉPAISSEUR TRADITIONNELô
0>MUR EN GALETS
Figure II.2.1 Exemples d'appareillages en maçonnerie de briques (a) et de pierres (b)
II.2.3 Conclusion
Suite à cet aperçu sur les constructions en maçonnerie, on peut constater que les structures en maçonnerie, qui pour beaucoup sont anciennes, sont des structures qui sont très diverses de par leurs composants et leur mode constructif. Ainsi leurs évaluations devraient suivre cette diversité en s'adaptant non pas à quelques types de maçonnerie, mais à un milieu complexe
32 Chapitre II : Les maçonneries et leur évaluation par les contrôles non destructifs constitué de divers matériaux et formant de multiples interfaces afin de garantir une l'évaluation de ces structures.
II.3 Pathologies structurelles des constructions maçonnées
Les pathologies des maçonneries peuvent toucher les briques (ou les pierres), le mortier ou bien les deux constituants en même temps. Ces pathologies sont principalement physiques et/ou chimiques [10], et elles sont influencées par l'environnement (température, humidité relative, présence de polluants, etc.) durant et après la construction, combiné à la qualité des matériaux et la structure (Figure II.3.1).
Structure Qualité des matériaux
L'environnement Déficience structurelle Processus physique Processus chimiques Mécanismes de détérioration Physique Chimique
Figure II.3.1 Influence de l'environnement, de la qualité des matériaux et de la structure sur les mécanismes de détérioration [11]
La détérioration physique est une conséquence de l'érosion, du gel-dégel, d'une cristallisation minérale et de fissures dues à l'action mécanique. La détérioration chimique est une conséquence de la dissolution, sulfatation, réaction avec des dépôts polluants, etc. Dans le cas des maçonneries de briques par exemple, la dégradation chimique est due habituellement à la durabilité du mortier [12].
II.3.1 Détérioration des briques
Les facteurs affectant la durabilité des briques peuvent être classés en deux catégories, facteurs internes et facteurs externes. Les principaux facteurs internes sont [12]:
le type d'argile et sa granulométrie, - le taux d'impuretés,
le processus de production et la cuisson. Concernant les facteurs externes, ils sont comme suit :
détérioration chimique due aux pluies acides et à la pollution atmosphérique,
le gel-dégel qui crée des contraintes cycliques causant ainsi des dommages physiques, - la cristallisation des sels issus de la lixiviation du mortier ou du sol qui génère des
contraintes similaire à celle de l'effet gel-dégel.
11.3.2 Détérioration des pierres
Les facteurs affectant la durabilité des pierres sont relativement similaires à ceux des briques : - la nature de la pierre et sa mise en œuvre,
- matériaux inadaptés (mortiers trop durs),
- la détérioration chimique due aux pluies acides et à la pollution atmosphérique, - la croissance des racines des plantes,
- la cristallisation des sels issus de la lixiviation du mortier ou du sol.
11.3.3 Détérioration du mortier
La dégradation du mortier engendre une fragilisation puis la destruction des structures en maçonnerie de briques. Le mortier joue un rôle de liant et assure la continuité entre les briques, l'altération de cette continuité constitue un risque pour l'ensemble de la maçonnerie. Les causes de cette dégradation peuvent être classées en trois grandes catégories : mécaniques, chimiques et biologiques. Les causes mécaniques sont principalement :
des tassements différentiels,
la croissance de végétaux s'insinuant à l'intérieur des joints exerce des contraintes nuisibles au mortier,
l'action du gel-dégel.
Les causes chimiques sont principalement les pluies acides et la pollution atmosphérique. La chaux étant de nature basique, elle est sensible à l'action des acides, ce qui se traduit par des chaines de décomposition produisant des sels qui s'éliminent par dissolution dans l'eau, ou à l'opposé comme les sulfates qui cristallisent en produisant des gonflements.
Les causes biologiques sont dues à la production d'acide nitrique à partir d'azote atmosphérique ou d'acide sulfurique par des pyrites, microorganismes, bactéries ou levure et champignons qui constituent un danger pour le mortier. La multiplication de ces phénomènes provoquant des dégradations aussi bien visibles qu'invisibles [8] créant ainsi des défauts de jointoiement. La localisation et le dimensionnement de ces défauts de jointoiement seront parmi les objets principaux de la présente étude.
11.3.4 Conclusion
Les structures en maçonnerie subissent avec le temps bon nombre de détériorations causées par divers facteurs. Ces détériorations sont aussi bien externes, par conséquent visibles, qu'internes nécessitant alors des auscultations plus poussées. Dans ce contexte, l'application
34 Chapitre II : Les maçonneries et leur évaluation par les contrôles non destructifs des techniques de contrôle non destructif s'avère très intéressante pour deux raisons. La première raison est le caractère non intrusif des techniques de contrôle non destructif dont la mise en œuvre n'affecte ni l'intégrité ni l'esthétique de structures sensibles. La seconde raison concerne la possibilité d'investiguer des volumes importants en peu de mesures et donc à des coûts nettement plus faibles que les outils destructifs usuels.
II.4 Techniques non destructives appliquées aux structures en
maçonnerie
II.4.1 Techniques acoustiques
Les techniques acoustiques sont des techniques issues de la géophysique qui sont appliquées au contrôle non destructif de l'état des matériaux et des structures de Génie Civil depuis plus de trente ans. Ces techniques exploitent la transmission et la réflexion des ondes mécaniques à travers le milieu à des fréquences soniques et ultrasoniques.
II.4.1.1 Essai sonique
L'essai sonique est basé sur la propagation d'une onde de compression de fréquences comprises entre 500 Hz et 10 kHz dans l'épaisseur de la structure. L'onde est émise d'un côté de la structure généralement par l'impact d'un marteau et l'acquisition, qui dépend de la configuration de mesure, est réalisée par un accéléromètre (Figure II.4.1). La vitesse d'onde résultante est alors une moyenne des vitesses locales le long du chemin parcouru. Les grandeurs de vitesse peuvent être tracées sous la forme d'une cartographie en 3D, avec la grille des points représentée en X et en Y et la vitesse d'impulsion portée en Z. Ce format permet une évaluation simple de l'état relatif de la maçonnerie ou une évaluation de l'état interne d'une structure, comme une voûte de pont en maçonnerie [5] [13].
a b ^
Figure II.4.1 Modes de transmission pour l'essai sonique (a) direct, (b) semi direct, (c) indirect
La Figure II.4.1 illustre les modes de transmission utilisés principalement pour des aperçus tomographiques. Il est généralement admis que la transmission directe est une technique simple à appliquer dans le CND des structures puisque la longueur de trajet est définie par la structure. En outre, seul le temps d'arrivée de la première onde est concerné, ce qui rend inutile la distinction entre fréquences complexes et réflexions. Cette méthode est utilisée avec succès pour évaluer l'uniformité du matériau, détecter la présence des vides, estimer la profondeur d'une fissure extérieure et estimer le module de Young [4] [13]. La détection des défauts est possible du fait que les ondes soniques ne peuvent pas se transmettre à travers un espace rempli d'air, (une fissure, un vide ou un décollement à l'interface entre la brique ou la pierre et le mortier), ce qui nécessite que l'onde trouve un chemin autour du vide, avec comme résultat une atténuation et l'augmentation du temps de trajet [4] [5]. Les résultats de cette technique (Figure II.4.2) montrent sa sensibilité à la présence de vides (défauts de jointoiement) et sa pertinence pour le contrôle de la qualité d'injection [14]. Ainsi sur l'image du milieu qui représente le résultat de l'essai sonique avant injection de mortier, on remarque les faibles vitesses de propagation dues à la présence de défauts de jointoiement. Le résultat de l'essai après injection (image de droite) affiche des vitesses nettement plus élevées suite au comblement des défauts de jointoiement par le mortier.
36 Chapitre II : Les maçonneries et leur évaluation par les contrôles non destructifs
Figure II.4.2 Essai sonique appliqué à un mur en maçonnerie de pierres pour le contrôle de l'efficacité de l'injection et comparaison des résultats avant et après l'intervention (les
couleurs sombres indiquent les plus grandes vitesses) [14]
Cette technique reste néanmoins limitée quant à l'estimation des dimensions des défauts.
II.4.1.2 Impact-écho
L'impact-écho, à l'origine développé pour mesurer l'épaisseur et l'intégrité d'une structure, est exécutée point par point, en utilisant un petit marteau pour frapper la surface de la zone auscultée à un endroit donné et en enregistrant l'énergie réfléchie avec un accéléromètre placé à côté de l'impact (Figure II.4.3).
Figure II.4.3 Configuration de l'essai d'impact-écho [15]
Dans cette technique, ce sont principalement les ondes de compression ou ondes P (P-waves) qui sont exploitées, elles se propagent vers l'intérieur du matériau et se réfléchissent au fur et à mesure qu'elles rencontrent les potentielles discontinuités du milieu [5].
Très mauvaise adhérence pierre-mortier Mauvaise adhérence pierre-mortier Très bonne adhérence pierre-mortier
Figure II.4.4 Spectre des fréquences obtenu sur un mur en maçonnerie de pierres [16] La complexité des ondes enregistrées rend l'analyse dans le domaine temporel très difficile, raison pour laquelle l'analyse fréquentielle est recommandée pour l'impact-écho. Les crêtes dans le spectre des fréquences correspondent à l'épaisseur ou aux fréquences de résonance des discontinuités. Connaissant la vitesse de l'onde de compression dans la maçonnerie, la profondeur de la fissure correspondante peut être calculée. La Figure II.4.4 montre trois exemples correspondant à trois conditions différentes d'adhérence du mortier. Dans le cas A, le plus grand pic de fréquence 6054 Hz correspond au joint de mortier, le second pic de fréquence 1172 Hz vient des multiples réflexions sur le fond du mur. Ceci indique que la plus grande partie de l'onde a été réfléchie au niveau du joint de mortier. Dans le cas B, le pic 878 Hz indique que l'onde a atteint le fond du mur, la présence de pics entre 5100 et 7200 sont le signe de la présence d'une multitude de petits vides sur toute l'épaisseur du mur. Pour le cas C, le plus grand pic vient des multiples réflexions entre la surface de mesure et le fond du mur. Dans ce dernier cas, une grande partie de l'onde a pu traverser toute l'épaisseur du mur sans réflexion majeure et ainsi indiquer une bonne adhérence pierre-mortier [16].
38 Chapitre II : Les maçonneries et leur évaluation par les contrôles non destructifs
État de jointofement
[mi Moyen m Mauvais
'Très mauvais
Figure Iï.4.5 Classification d'un contrefort en maçonnerie de pierre à partir des résultats de l'impact écho [16]
La Figure II.4.5 montre l'exploitation des données obtenues par impact-écho sur un contrefort en maçonnerie de pierres. Ces données sont classées en fonction de l'état du jointoiement de la maçonnerie de pierres. Elles sont très utiles pour cibler les zones nécessitant des réparations, notamment en vue d'injections de mortier. D'ailleurs selon Lin et al [17], cette technique donne de très bons résultats pour les contrôles après injection. Néanmoins, comme la technique précédente, son potentiel pour estimer les dimensions des défauts est limité.
![Figure II.4.8 Zone de faibles vitesses indiquant des zones endommagées [20]](https://thumb-eu.123doks.com/thumbv2/123doknet/5614287.135286/46.916.193.723.88.567/figure-ii-zone-faibles-vitesses-indiquant-zones-endommagées.webp)
![Figure II.4.12 a) passage de l'antenne sur la surface de la structure b) B-scan obtenu lors de l'acquisition [29]](https://thumb-eu.123doks.com/thumbv2/123doknet/5614287.135286/50.918.271.653.97.564/figure-passage-antenne-surface-structure-scan-obtenu-acquisition.webp)