Mesure des marées et des vagues à l’aide d’une bouée
GNSS
Mémoire
Benoît Crépeau Gendron
Maîtrise en sciences géomatiques
Maître ès sciences (M. Sc.)
Québec, Canada
ii
Résumé
Ce projet effectué en collaboration avec le Centre Interdisciplinaire de Développement en Cartographie des Océans (CIDCO) de Rimouski porte sur la mesure des marées et des vagues à l’aide d’une bouée GNSS. En l’occurrence, une bouée bathymétrique HydroBall® développée par le CIDCO a été adaptée pour le projet. Des modifications comme la stabilisation de l’antenne, la reconfiguration des composantes électroniques et l’augmentation de son autonomie y ont été apportées dans le but d’améliorer la qualité des mesures GNSS (GPS et GLONASS) et de permettre l’acquisition de données sur une période d’un peu plus d’un mois. D’une part, des expérimentations faites au Laboratoire Hydraulique Environnemental de l’INRS pouvant générer des vagues de diverses amplitudes et périodes ont été effectuées. Les traitements GNSS ont permis de décrire le mouvement des vagues afin de mesurer l’amplitude et la période de ces dernières. Ces mesures GNSS ont été comparées à celles de jauges ultrasons très précises utilisées en guise de comparaison.
D’autre part, des observations GNSS effectuées à Rimouski sur une période d’observations de plus d’un mois ont été réalisées. Ces mesures de niveau d’eau à l’aide de la bouée GNSS ont été comparées aux mesures du marégraphe de Rimouski du SHC situé à proximité.
Les analyses effectuées ont principalement porté sur les traitements GNSS en mode absolu de précision PPP tant pour la mesure des marées que des vagues.
À la lumière des résultats obtenus, on constate que cette bouée de petite taille, facilement déployable et peu dispendieuse, permet en un seul instrument la mesure des marées et des vagues à une précision centimétrique, et ce en mode de positionnement absolu.
iii
Abstract
This project, carried out in collaboration with the Interdisciplinary Center for the Development of Ocean Mapping (CIDCO) in Rimouski, approaches the measurement of waves and tides using a GNSS buoy. One of the HydroBall® bathymetric buoy developed by CIDCO was adapted for this specific purpose. Modifications such as stabilization of the antenna, reconfiguration of the electronic components and increase in its autonomy, were made to improve the quality of the GNSS measurements (GPS and GLONASS) and to allow the acquisition of data for a period of up to one month.
In the case of the wave measurements, experiments were carried out at the INRS Hydraulic Environmental Laboratory where waves of varying amplitudes and periods were generated. GNSS treatments were used to describe the wave’s movement, thus allowing the determination of their amplitude and period. The GNSS measurements were compared with those of accurate ultrasonic gauges used as reference values.
In the case of the tide measurements, GNSS observations were carried out in Rimouski’s harbour over a one month period. These water level measurements using the GNSS buoy were compared to measurements collected from a nearby CHS Tide gauge.
The analyzes carried out mainly focused on GNSS processing in an absolute mode using precise point positioning (PPP) for both tide and wave measurements.
Our results show that this small, easily deployable and affordable buoy allows, in a single instrument, the measurement of tides and waves at a centimeter level of accuracy using precise point positioning.
iv
Table des matières
Résumé ... ii
Abstract ...iii
Liste des tableaux ... vii
Liste des figures ... viii
Remerciements ...x
Chapitre 1. Introduction ... 1
1.1. Mise en contexte ... 1
1.1.1. Importance de la mesure des marées et des vagues ... 1
1.1.2. Mesures conventionnelles des marées et des vagues ... 2
1.1.3. Ouverture technologique d’une bouée GNSS ... 4
1.2. Problématique ... 4
1.3. Hypothèses générales de recherche et objectif ... 5
1.4. Méthodologie ... 7
1.4.1. Étape 1 - Modifications, mesures et vérifications de l’HydroBall ... 8
1.4.2. Étape 2 - Acquisition des données ... 8
1.4.3. Étape 3 - Traitements des données et comparaison des résultats ... 9
1.5. Bouées GNSS pour la mesure des niveaux d’eau... 11
1.5.1. Comparaison de 2 travaux d’importance ... 11
1.5.2. Établissement de système de référence vertical et modèle de séparation ... 16
1.5.3. Hydrologie ... 17
1.5.4. Niveau de la mer ... 17
1.6. Bouées GNSS pour la mesure des vagues ... 18
1.6.1. Mesure des vagues – quelques applications ... 18
1.6.2. Mesure des vagues avec une bouée GNSS ... 20
1.6.3. Modèles de bouées existantes ... 20
1.7. Caractéristiques des marées et des vagues ... 21
Chapitre 2. Modes de traitement GNSS ... 24
2.1. Mode absolu ... 24
2.1.1. Outil SRCS-PPP ... 24
2.1.2. Outil SCRS-PPP-AR ... 26
v
2.3. Point de référence de l’antenne ... 27
Chapitre 3. Aspects techniques ... 29
3.1. Modifications et améliorations apportées à l’HydroBall ... 29
3.1.1. Composantes d’origine de l’HydroBall ... 29
3.1.2. Modifications et améliorations des composantes de l’HydroBall ... 30
3.2. Système d’ancrage ... 32
3.3. Ligne de flottaison ... 33
3.4. Tests de vérification et essais préliminaires ... 35
3.4.1. Piliers sur le toit du PEPS... 35
3.4.2. Tests au parc nautique de Cap-Rouge ... 39
Chapitre 4. Mesure des vagues ... 40
4.1. Modus Operandi ... 40
4.2. Configurations et séquences d’observations ... 43
4.3. Aspects techniques des tests au LHE ... 44
4.3.1. Modes de traitements GNSS ... 44
4.3.2. Paramètres d’observation de la bouée... 45
4.4. Statistiques sur le traitement GNSS ... 46
4.5. Régression sinusoïdale ... 47
4.5.1. Résumé de l’interpolation spatiale des jauges et du modèle de régression sinusoïdale ... 51
4.6. Interpolation spatiale des jauges à la position de l’HydroBall ... 52
4.7. Comparaison des altitudes vis-à-vis une des jauges ... 55
Chapitre 5. Mesure des marées ... 58
5.1. Modus Operandi ... 58
5.1.1. Opérations préalables au mouillage ... 58
5.1.2. Opérations techniques du mouillage ... 60
5.1.3. Séquences d’observations ... 62
5.2. Paramètres d’observation de la bouée ... 63
5.3. Résultats préliminaires au premier site d’ancrage ... 64
5.3.1. Trois journées représentatives au premier site d’ancrage ... 64
5.3.2. Comparaison des traitements GNSS en mode relatif au marégraphe ... 65
5.3.3. Comparaison des traitements GNSS en mode absolu ... 67
5.4. Résultats au deuxième site d’ancrage en mode absolu précis PPP ... 69
vi
5.4.2. Méthode de Van de Casteele ... 75
5.4.3. Comparaison des traitements obtenus du logiciel TCWL-Tools du SHC... 77
Chapitre 6. Conclusions et recommandations ... 86
6.1. Conclusions ... 86
6.2. Recommandations ... 87
Bibliographie ... 91
Annexe I. Spécifications techniques ... 94
I.1. Spécifications techniques du récepteur et de l’antenne GNSS ... 94
I.2. Fichier ANTEX et compatibilité entre l’outil SCRS-PPP et l’en-tête du fichier RINEX ... 96
Annexe II. Analyse des résidus du test de vérification sur le toit du PEPS ... 97
Annexe III. Statistiques de la régression sinusoïdale ... 98
Annexe IV. Graphiques des résultats obtenus pour l’interpolation spatiale des jauges à la position de l’HydroBall ... 102
Annexe V. Avis au ministre des Transports du Canada ... 106
Annexe VI. Bouée dérivante ... 110
Annexe VII. Espace mémoire d’enregistrement ... 112
Annexe VIII. Système d’alimentation de l’HydroBall ... 113
Annexe IX. Traitements préliminaires au Port de Rimouski ... 114
Annexe X. Tableaux résumés des composantes harmoniques des marées à Rimouski... 117
vii
Liste des tableaux
TABLEAU 1.1:DIMENSIONS ET CARACTÉRISTIQUES PRINCIPALES DES 3 BOUÉES FRANÇAISES (ANDRÉ ET AL.2014).
... 12
TABLEAU 1.2:SPÉCIFICATIONS DES DIFFÉRENTES BOUÉES COMPARÉES. ... 21
TABLEAU 2.1:PARAMÉTRAGE DE L'OUTIL SCRS-PPP OFFERT À L’UTILISATEUR. ... 25
TABLEAU 2.2:RÉSUMÉ DES PARAMÈTRES DE TRAITEMENTS SCRS-PPP... 26
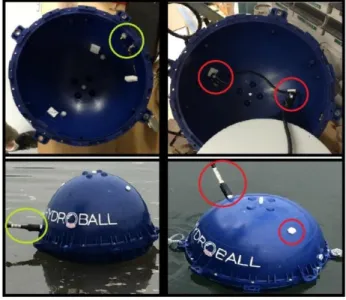
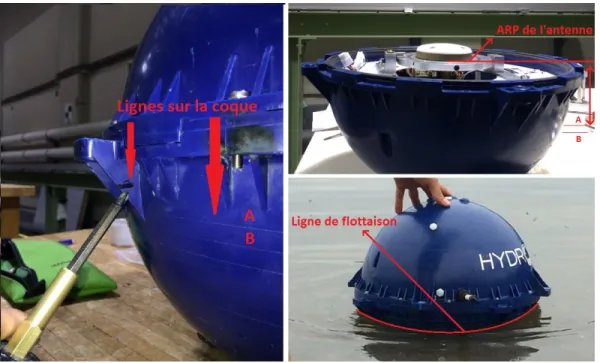
TABLEAU 3.1:DISTANCES VERTICALES ENTRE LES LIGNES A ET B SUR LA COQUE DE L'HYDROBALL ET LE POINT DE RÉFÉRENCE DE L'ANTENNE GNSS(ARP). ... 35
TABLEAU 3.2:TRAITEMENTS TBC CINÉMATIQUES,L1, MASQUE DE 10°, CONSTELLATION GPS, TAUX DE 15 SECONDES AVANT L’ABAISSEMENT DE L’ÉLECTRONIQUE DANS LA COQUE INFÉRIEURE DE L’HYDROBALL... 37
TABLEAU 3.3:TRAITEMENTS TBC CINÉMATIQUES,L1, MASQUE DE 10°, CONSTELLATION GPS, TAUX DE 15 SECONDES AVEC LES MODIFICATIONS ABAISSANT L’ÉLECTRONIQUE DANS LA COQUE INFÉRIEURE DE L’HYDROBALL. ... 38
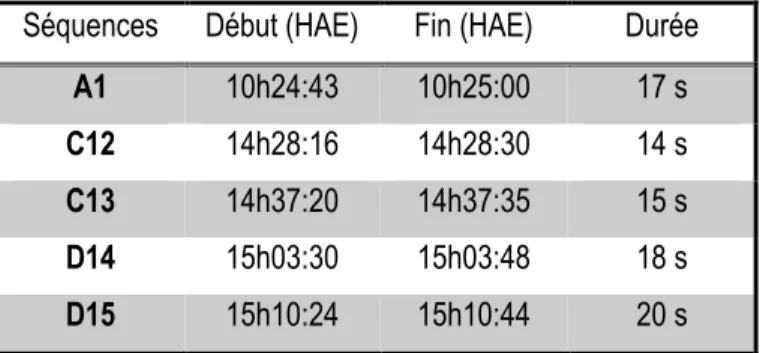
TABLEAU 4.1 :DESCRIPTION DES SESSIONS ET DES SÉQUENCES SÉLECTIONNÉES. ... 44
TABLEAU 4.2 :MOYENNE DES PRÉCISIONS GNSS VERTICALES CALCULÉES À CHAQUE ÉPOQUE ET INFORMATION SUR LES TRAITEMENTS PPK. ... 46
TABLEAU 4.3:SOUS ENSEMBLE DE SÉQUENCES (SESSIONS) AU CANAL DE L’INRS UTILISÉES POUR LA RÉGRESSION SINUSOÏDALE. ... 47
TABLEAU 4.4:ESTIMATION DES PARAMÈTRES DU MODÈLE SINUSOÏDAL, SÉQUENCE A1. ... 50
TABLEAU 4.5:ÉCARTS ENTRE LES PARAMÈTRES D'INTÉRÊT (A ET T), SÉQUENCE A1. ... 51
TABLEAU 4.6:COMPARAISON DES PARAMÈTRES SINUSOÏDAUX ESTIMÉS AVEC LE MODÈLE DE RÉGRESSION SINUSOÏDALE. ... 52
TABLEAU 4.7:STATISTIQUES DES DIFFÉRENCES ENTRE VALEURS DES JAUGES INTERPOLÉES ET SOLUTIONS GNSS DE L’HYDROBALL POUR LE MODE SINUSOÏDAL DES VAGUES. ... 54
TABLEAU 4.8:STATISTIQUES DES DIFFÉRENCES ENTRE LES VALEURS DE LA JAUGE 2 ET DES SOLUTIONS GNSS LORSQUE L’HYDROBALL ÉTAIT VIS-À-VIS LA JAUGE 2(À ±0.2 M LONGITUDINALEMENT). ... 56
TABLEAU 5.1:SÉQUENCES D'OBSERVATIONS DES MARÉES AU PORT DE RIMOUSKI. ... 63
TABLEAU 5.2:POURCENTAGE DE SOLUTIONS RÉUSSIES, MOYENNE ET ÉCART-TYPE DES DIFFÉRENCES D’ALTITUDE POUR LES TRAITEMENTS GNSS PAR RAPPORT AUX MESURES DU MARÉGRAPHE. ... 69
TABLEAU 5.3:IMPACT DE LA VARIATION DU CRITÈRE DE PRÉCISION VERTICALE SUR LE POSITIONNEMENT PPP TRAITEMENTS BRUTES (SANS MOYENNE MOBILE). ... 71
TABLEAU 5.4:STATISTIQUES JOUR PAR JOUR DU TRAITEMENT PPP SELON 2 CRITÈRES DE PRÉCISION VERTICALES PPP AVEC MOYENNE MOBILE DE ±1.5 MIN... 74
TABLEAU 5.5:PHÉNOMÈNE ASTRONOMIQUE, VITESSE EN °/H ET PÉRIODE DE QUELQUES-UNES DES PRINCIPALES COMPOSANTES HARMONIQUES DU SIGNAL DE MARÉE. ... 78
TABLEAU 5.6:DIFFÉRENCES ENTRE LES COMPOSANTES HARMONIQUES DU SIGNAL DE MARÉE POUR LES VALEURS OFFICIELLES (SHC) ET SINECO(35J.). ... 80
TABLEAU 5.7:DIFFÉRENCES ENTRE LES COMPOSANTES HARMONIQUES DU SIGNAL DE MARÉE POUR LES VALEURS OFFICIELLES (SHC) ET HYDROBALL (35J.). ... 81
TABLEAU 5.8:DIFFÉRENCES ENTRE LES COMPOSANTES HARMONIQUES DU SIGNAL DE MARÉE POUR LES VALEURS SINECO(35J.) ET HYDROBALL (35J.). ... 81
TABLEAU 5.9:COMPARAISON DES DIFFÉRENCES DES PRÉDICTIONS AU 15 MINUTES DES MARÉES POUR LE MOIS DE MARS 2017. ... 84
TABLEAU 5.10:ÉCART POUR CHAQUE MOMENT DE HAUTES ET BASSES MERS DES PRÉDICTIONS POUR LE MOIS DE MARS 2017. ... 85
viii
Liste des figures
FIGURE 1.1PRINCIPE DE RATTACHEMENT D'UN MARÉGRAPHE À UN SYSTÈME DE RÉFÉRENCE VERTICAL (SOURCE:
UNIVERSITY OF COLORADO 2011). ... 2
FIGURE 1.2:DIAGRAMME PRÉSENTANT LA MÉTHODOLOGIE ASSOCIÉE AU PROJET. ... 7
FIGURE 1.3:DÉVELOPPEMENT DU POSITIONNEMENT RELATIF TEMPOREL GPS(KIROUAC 2011). ... 10
FIGURE 1.4:TROIS BOUÉES GPS FRANÇAISES DE GAUCHE À DROITE ;SHOM,INSU ET IPGP(ANDRÉ ET AL.2013). ... 12
FIGURE 1.5:BOUÉE HYDROLEVEL MINI DE LA COMPAGNIE AXYSTECHNOLOGIES INC.(RILEY ET AL.2014). ... 14
FIGURE 1.6:CONFIGURATION DE L'ANCRAGE DE LA BOUÉE HYDROLEVEL MINI (RILEY ET AL.2014). ... 15
FIGURE 1.7:BOUÉE DE TYPE DATAWELL MODÈLE MKIII MUNIE D’UN ACCÉLÉROMÈTRE POUR MESURER LA HOULE (DATAWELL BV2017). ... 19
FIGURE 1.8:BOUÉE DE TYPE WAVEDROID (WAVEDROID 2016). ... 21
FIGURE 3.1:DISPOSITION DES COMPOSANTES D’ORIGINE DE L'HYDROBALL AVANT MODIFICATIONS (CIDCO2014).29 FIGURE 3.2:MODIFICATIONS APPORTÉES AUX VOYANTS LUMINEUX ET À L'ANTENNE DE COMMUNICATION DE L'HYDROBALL. ... 31
FIGURE 3.3:AJOUT D'UN CYLINDRE DE BATTERIES SOUS L'HYDROBALL POUR UNE PLUS GRANDE AUTONOMIE. ... 32
FIGURE 3.4:SYSTÈME D'ANCRAGE DE LA BOUÉE HYDROBALL (GIRARDOT 2001). ... 33
FIGURE 3.5:MESURE DE LA LIGNE DE FLOTTAISON PAR RAPPORT À L’ANTENNE GNSS. ... 34
FIGURE 3.6:REPORT DE LA DISTANCE VERTICALE ENTRE LE POINT LE PLUS BAS DE L'ANTENNE GNSS (ARP) ET LES LIGNES GRADUÉES SUR LA COQUE (NKE INSTRUMENTATION 2016). ... 35
FIGURE 3.7:TEST DE VÉRIFICATION SUR LE TOIT DU PEPS DE L'UNIVERSITÉ LAVAL. ... 36
FIGURE 3.8:ANTENNE GNSS AU CENTRE DE LA BOUÉE ET ÉLECTRONIQUE ABAISSÉE SOUS L'ANTENNE GNSS (PHOTO DU BAS). ... 38
FIGURE 3.9:EXPÉRIMENTATIONS AU PARC NAUTIQUE DE CAP-ROUGE. ... 39
FIGURE 4.1:VUE DU CANAL HYDRAULIQUE DE L’INRS. ... 40
FIGURE 4.2:VUE AÉRIENNE DU CANAL HYDRAULIQUE DE L’INRS. ... 41
FIGURE 4.3:ACCÈS À LA BOUÉE À L'AIDE D'UNE EMBARCATION PNEUMATIQUE À PARTIR DU PONT ROULANT RÉTRACTABLE. ... 42
FIGURE 4.4:EXEMPLES DE VAGUES DANS LE CANAL DE L’INRS(À GAUCHE : DE FORME SINUSOÏDALE; À DROITE : PHÉNOMÈNE DE RÉSONNANCE). ... 43
FIGURE 4.5 :CYLINDRE (SANS BATTERIES) SOUS L'HYDROBALL ET STABILISATION DE L'ANTENNE GNSS. ... 43
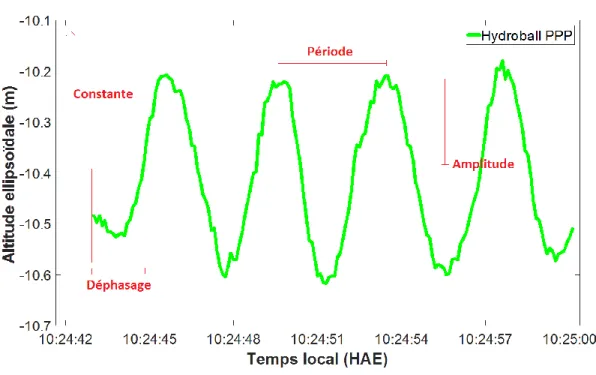
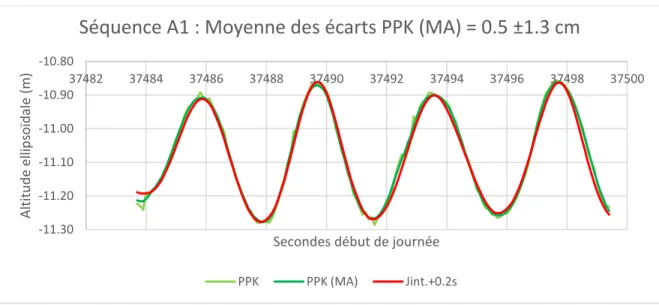
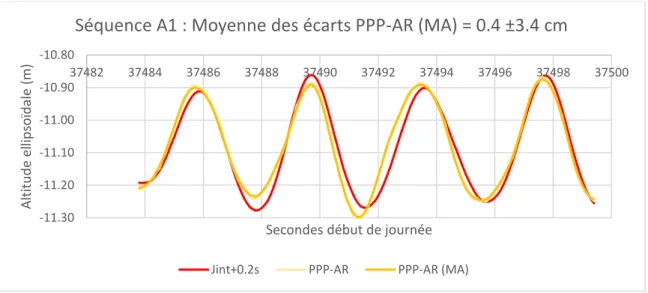
FIGURE 4.6:OBSERVATIONS DE L'HYDROBALL ET DES JAUGES POUR LA SÉQUENCE A1. ... 48
FIGURE 4.7:REPRÉSENTATION GRAPHIQUE DES PARAMÈTRES DU MODÈLE DE RÉGRESSION SINUSOÏDALE. ... 49
FIGURE 4.8:SÉRIES DE DONNÉES EN BLEU ET MODÈLE DE RÉGRESSION AJUSTÉ EN ROUGE, SOLUTION PPK(EN HAUT À GAUCHE), SOLUTION PPP(EN HAUT À DROITE), JAUGE 2(EN BAS À GAUCHE) ET LA JAUGE 3(EN BAS À DROITE). ... 50
FIGURE 4.9:ILLUSTRATION DU PRINCIPE DE LA MOYENNE MOBILE. ... 53
FIGURE 4.10:RÉSULTATS OBTENUS DE L’INTERPOLATION SPATIALE POUR LE TRAITEMENT PPK. ... 54
FIGURE 4.11:RÉSULTATS OBTENUS DE L’INTERPOLATION SPATIALE POUR LE TRAITEMENT PPP. ... 55
FIGURE 4.12:RÉSULTATS OBTENUS DE L’INTERPOLATION SPATIALE POUR LE MODE DE TRAITEMENT PPP-AR. ... 55
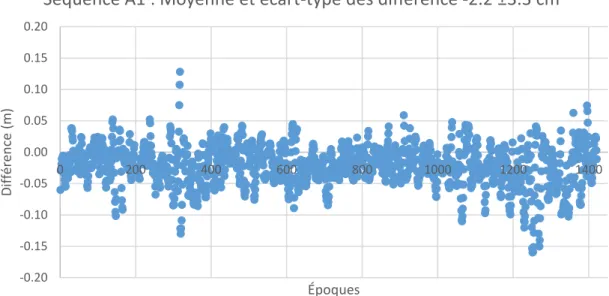
FIGURE 4.13:DIFFÉRENCES ENTRE LES VALEURS DE LA JAUGE 2 ET DE LA SOLUTION PPK(TBC) LORSQUE L’HYDROBALL ÉTAIT SITUÉE À ±0.2 M DE LA JAUGE 2(SÉQUENCE A1). ... 57
FIGURE 5.1:TRANSPORT DE L'HYDROBALL ET DU SYSTÈME D'ANCRAGE DE CHEZ MULTI-ÉLECTRONIQUE VERS LA MARINA DE RIMOUSKI... 59
ix
FIGURE 5.3:TECHNIQUE DE MOUILLAGE MISE À L'EAU EN DERNIER UTILISÉE POUR DÉPLOYER LES BOUÉES SELON (GIRARDOT 2001); FIGURE DE GAUCHE ET MISE À L’EAU DE L'HYDROBALL À L’AIDE D’UN PALAN (FIGURE DE DROITE). ... 61 FIGURE 5.4:VUE D'ENSEMBLE DES INSTALLATIONS DU PORT DE RIMOUSKI (SOURCE L’AVANTAGE RIMOUSKI). ... 62 FIGURE 5.5:DONNÉES MÉTÉOROLOGIQUES PROVENANT DE LA BOUÉE IML-4 AU LARGE DE RIMOUSKI,(OGSL2016).
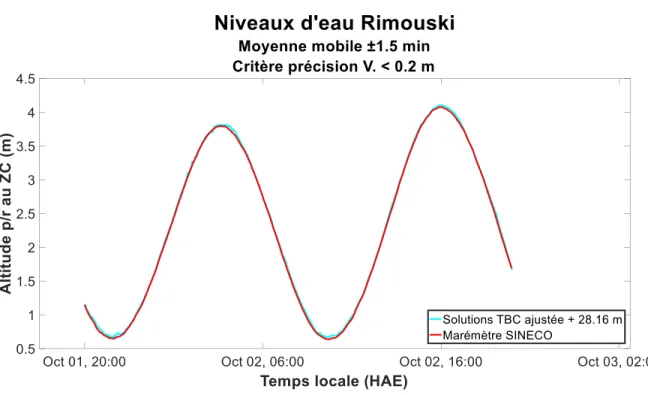
... 65 FIGURE 5.6:SOLUTION TBC AVEC MOYENNE MOBILE ET DONNÉES SINECO POUR UN CRITÈRE DE PRÉCISION
VERTICALE <0.2 M POUR LE 2 OCTOBRE 2016. ... 66 FIGURE 5.7:SOLUTION PPP AVEC MOYENNE MOBILE, SOLUTION PPP-AR AVEC MOYENNE MOBILE ET DONNÉES
SINECO POUR LE 2 OCTOBRE 2016 AVEC UN CRITÈRE DE PRÉCISION VERTICALE <0.2 M. ... 68 FIGURE 5.8:SÉRIES TEMPORELLES DE LA SOLUTION PPPGNSS ET DES MESURES DU MARÉGRAPHE POUR UN
CRITÈRE DE PRÉCISION VERTICALE <0.40 M. ... 72 FIGURE 5.9:SÉRIES TEMPORELLES DES TRAITEMENTS PPPGNSS ET DES MESURES DU MARÉGRAPHE POUR UN
CRITÈRE DE PRÉCISION VERTICALE <0.10 M. ... 73 FIGURE 5.10:GRAPHIQUE DE VAN DE CASTEELE POUR L'ENSEMBLE DES OBSERVATIONS AVEC MOYENNE MOBILE DE
±1.5 MIN ET CRITÈRE DE PRÉCISION VERTICALE <0.4 M. ... 76 FIGURE 5.11:GRAPHIQUE DE VAN DE CASTEELE POUR L'ENSEMBLE DES OBSERVATIONS AVEC MOYENNE MOBILE DE
±1.5 MIN ET CRITÈRE DE PRÉCISION VERTICALE <0.1 M. ... 76 FIGURE 5.12:SÉRIE TEMPORELLE DES PRÉDICTIONS DU SIGNAL DE MARÉE POUR LE MOIS DE MARS 2017. ... 83 FIGURE 5.13:SÉRIE TEMPORELLE DES PRÉDICTIONS DU SIGNAL DE MARÉE POUR LES 18 ET 19 MARS 2017. ... 83
x
Remerciements
J’aimerais tout d’abord adresser mes remerciements à mon directeur de recherche, Dr. Rock Santerre, pour l’inspirant projet de recherche que ce dernier m’a proposé. Je tiens à souligner sa façon méthodique de travailler, sa disponibilité et ses conseils qui m’ont grandement servi et guidé dans la réalisation de ce projet de maîtrise. Je me permets aussi d’ajouter que c’est grâce à ses nombreux contacts à l’extérieur de l’Université Laval que plusieurs des étapes du projet ont pu être réalisées.
Je tiens également à remercier Mathieu Rondeau, principal correspondant au CIDCO et initiateur de l’HydroBall®, qui a grandement contribué à la réalisation concrète de ce projet de recherche, tant aux niveaux technique, méthodologique que financier (obtention du contrat avec Hydro-Québec). Ce fut un plaisir de travailler avec ce grand professionnel.
Au département des sciences géomatiques, je tiens à remercier tout d’abord Guy Montreuil pour la réalisation des modifications techniques sur la bouée; j’ai beaucoup apprécié mes visites dans l’atelier de mécanique du laboratoire de métrologie. J’aimerais aussi remercier Stéphanie Bourgon pour ses judicieux conseils scientifiques, Jonathan Gagnon, Jean-Philippe Veilleux, M. Ali Chouaer et Alexandre Grondin-Nadeau pour leurs aides techniques. Finalement, merci au Dr. Marc Cocard pour ses conseils dans le cadre de mon comité d’encadrement.
J’aimerais aussi remercier Dr. Nicolas Seube, directeur scientifique du CIDCO, pour ses conseils et son aide en tant que codirecteur de recherche. D’ailleurs, j’ajouterais mes remerciements à l’ensemble de l’équipe du CIDCO, pour leur accueil chaleureux et leur contribution dans ce projet de recherche avec une mention toute spéciale à Julien Desrochers et Camille Stoeffler.
Des remerciements également à l’équipe de Multi-Électronique, à l’équipe du Laboratoire hydraulique de l’INRS ainsi qu’à M. Bernard Tessier (Service hydrographique du Canada), au Dr. Simon Banville (Levés géodésiques du Canada) et au Dr. Boussaad Akrour (Garde côtière canadienne) qui ont tous joué un rôle important dans la réalisation de mon projet de recherche.
Finalement, j’aimerais remercier le Conseil de recherche en sciences naturelles et en génie du Canada (CRSNG) pour les bourses d’études supérieures que j’ai obtenues par l’entremise des subventions accordées à mon directeur de recherche, Dr. Santerre. J’aimerais aussi remercier l’Ordre des arpenteurs-géomètres du Québec et le groupe Cadoret arpenteurs-géomètres, pour l’obtention d’une bourse du Fonds Joncas. Ce financement fait partie intégrante de la réussite de mes études.
1
Chapitre 1. Introduction
1.1. Mise en contexte
L’impact des changements climatiques est de plus en plus présent dans nos vies. Pour certains milieux, l’impact de cette évolution du climat sur l’environnement est accentué; l’environnement maritime et côtier en est un bon exemple. L’hydrographie, l’océanographie, la climatologie et la géomorphologie sont tous des domaines qui étudient les changements climatiques interagissant dans le processus dynamique d’érosion et de submersion marine (Morneau 2015). Ces domaines s’appuient sur une variété de technologies afin d’acquérir, d’analyser et de traiter l’information reliée aux changements climatiques. Parmi ces technologies, l’utilisation du système GNSS (GPS) occupe déjà une place importante dans l’ensemble de ces domaines.
Les dernières années ont vu surgir l’émergence de nouvelles utilisations du système GNSS favorisant par le fait même le développement de nouvelles applications en milieu maritime et côtier. Celles-ci sont supportées par des récepteurs GNSS de plus en plus accessibles (prix abordable, autonomie et miniaturisation) et des algorithmes de traitements plus puissants.
Les marées et les vagues sont des phénomènes importants à mesurer et étudier qui touchent directement les domaines dont il est fait mention plus haut. D’ailleurs, il est démontré que l’utilisation du système GNSS présente un potentiel intéressant pour la mesure des marées et des vagues (Patra & Jena 2014) et (Arroyo-Suarez et al. 2006).
Dans le cadre de ce mémoire, on s’intéressera précisément à l’étude de la mesure des marées et des vagues à l’aide d’une bouée GNSS optimalement adaptée à cet effet.
1.1.1. Importance de la mesure des marées et des vagues
Les marées et les vagues font l’objet de mesures depuis déjà longtemps (Patra & Jena 2014) et (Santerre 2015). En arpentage, la mesure des marées est utile plus particulièrement au niveau de la délimitation du droit de propriété. Plus précisément, la mesure de la marée sert à établir la limite des hautes eaux. On peut aussi penser aux mesures de marées pour l’établissement de surfaces de référence verticale, comme le zéro des cartes qui est la surface de référence verticale à laquelle se rapportent toutes les profondeurs indiquées sur les cartes marines du Service hydrographique du Canada (SHC). Dans un autre ordre d’idée, le trafic maritime bénéficie aussi beaucoup des mesures de niveau d’eau, car les navires sont souvent restreints quant à leur tirant d’eau afin de pouvoir naviguer dans les chenaux et les ports. En effet, la connaissance des marées permet d’optimiser le tirant d’eau des navires en fonction de leur déplacement et du niveau actuel des marées, ce qui permet une meilleure détermination du dégagement sous quille. Les constructions maritimes, la bathymétrie et les études sur l’environnement bénéficient aussi des mesures de niveau d’eau.
2
La mesure des vagues est utile à plusieurs niveaux, par exemple pour les études sur les impacts environnementaux. Plus particulièrement, on peut nommer le ministère des Transports du Québec qui entretient bon nombre de routes longeant de nombreux cours d’eau et où la mesure des vagues est importante afin d’évaluer l’impact de l’érosion sur ces routes. Dans le même ordre d’idée, la mesure des vagues est essentielle pour la sécurité publique reliée à l’érosion, qui non seulement affecte les routes le long des cours d’eau, mais aussi toutes autres constructions bordant ces cours d’eau. On peut aussi penser à l’utilisation de la mesure des vagues pour les plaisanciers et les adeptes de sports nautiques (surf, kayak de mer, planche à voile, etc.). Pour ces personnes, la mesure des vagues devient très importante pour la planification de leur loisir.
La mesure des marées et des vagues trouve aussi application en ce qui a trait à la création de modèles de prévisions environnementales (Morneau 2015), (Hanson et al. 2014) et (Matte 2014). Ceux-ci sont des outils très utiles à la prise de décision permettant de mesurer et de prédire l’impact, tant social qu’économique, qu’a l’environnement sur notre société. Plusieurs modèles environnementaux existent déjà à des échelles locales, nationale ou encore internationale. La combinaison de la mesure des marées et des vagues en un seul outil (comme une bouée GNSS) peut s’avérer très utile afin d’alimenter ces modèles.
1.1.2. Mesures conventionnelles des marées et des vagues
Plusieurs instruments ont été développés afin de mesurer les niveaux d’eau, et par le fait même les marées. Pour ne pas tous les nommer, on peut citer, entre autres, le marégraphe à flotteur, le marégraphe à pression, le marégraphe à capteur acoustique, le marégraphe radar et plus anciennement la planche à marées. Tous ces instruments fonctionnent selon le même principe : le marégraphe, qui est installé sur une structure stable et permanente (comme un quai), mesure le niveau de l’eau. Ce niveau d’eau est ensuite directement rattaché à des repères de nivellement (par nivellement géométrique). La Figure 1.1 illustre ce fonctionnement.
Figure 1.1 Principe de rattachement d'un marégraphe à un système de référence vertical
3
Ce principe est bien établi, mais il existe plusieurs intérêts à pouvoir effectuer des mesures sans être rattaché à une infrastructure côtière. D’une part, on peut penser à la mesure de niveau d’eau effectuée directement dans les chenaux de navigation, en zone ultra côtière, au large des côtes pour l’établissement de modèles de prévisions environnementales ou de constructions offshore. D’autre part, on peut mentionner les mesures de niveau d’eau dans le Nord canadien où l’infrastructure géodésique est pratiquement absente. À cet effet, une bouée GNSS peut être perçue comme une solution abordable dans tous ces genres de situations.
Il existe divers types d’instruments pour mesurer les vagues (Pandian et al. 2010) : les bouées de surface, les profileurs de courant acoustique Doppler (ADCP), les radars hautes fréquences et les radars à ouverture synthétique. Chacun de ces instruments offre des spécifications de mesures différentes quant à la précision, la portée et l’endroit à partir duquel est effectuée la mesure. La bouée GNSS, quant à elle, s’inscrit dans la catégorie des bouées de surface. En effet, celles-ci se distinguent des autres types d’instruments énumérés ci-dessus en effectuant la mesure des vagues à l’aide de capteurs à l’intérieur de la bouée mesurant le déplacement de celle-ci. Cette mesure s’effectue pour un endroit ponctuel, à l’emplacement de la bouée. Selon (de Vries et al. 2003), il existe 3 principes de fonctionnement pour les bouées de surface afin de déterminer la période et l’amplitude des vagues. Premièrement, il y a les bouées de surface munies d’accéléromètres, pour lesquelles une double intégration du signal d’accélération permet d’obtenir un déplacement de la bouée. Ces bouées sont actuellement les plus répandues. Deuxièmement, on retrouve les bouées munies de récepteurs GNSS mesurant l’amplitude et la période de la vague en utilisant le principe de l’effet Doppler. Ce concept a été développé par la compagnie hollandaise Datawell (de Vries et al. 2003). Finalement, il existe aussi les bouées qui utilisent la fonction de positionnement du GNSS en utilisant les mesures de phase en mode relatif (ou différentiel) pour mesurer les vagues. Celles-ci ont comme inconvénient actuel de requérir une station de référence GNSS pour assurer une précision de positionnement centimétrique.
L’utilisation du GNSS dans les bouées de surface comporte des avantages sur l’utilisation de l’accéléromètre. Le GNSS ne demande pas le calibrage d’un ensemble de capteurs de mouvement embarqué (comme un accéléromètre) et n’inclut pas de pièces mécaniques requérant une manipulation et un entretien délicat (Herbers et al. 2012). Il permet aussi la détection de vagues ayant de très longues périodes (de Vries et al. 2003). D’un autre côté, l’utilisation du GNSS en mode relatif est restreinte quant à la distance à laquelle la bouée peut se situer de la station de référence, de façon à fournir une détermination précise de la mesure des vagues. Habituellement, une distance jusqu’à une vingtaine de kilomètres permet de conserver une précision centimétrique. La bouée GNSS utilisant l’effet Doppler pour mesurer les vagues, elle, n’a aucune limitation à ce niveau puisqu’elle intègre les mesures Doppler du récepteur GNSS pour décrire le déplacement (et non la position) de la bouée dans un repère local nord-ouest-vertical. Dans le présent projet, les mesures GNSS sont
4
faites à l’aide des mesures de phase afin d’établir la position de la bouée en référence à un système global (datum ou ellipsoïde de référence), ce qui la différentie des deux techniques et représente un avantage indéniable.
1.1.3. Ouverture technologique d’une bouée GNSS
Cette mise en contexte nous permet de situer le GNSS dans le domaine de la mesure des marées et des vagues. Elle permet de constater qu’une bouée GNSS, de par sa fonction de positionnement en utilisant les mesures de phase, représente une solution innovante pour la mesure des marées et des vagues comparativement aux instruments existants qui ont été présentés précédemment.
D’abord, elle est un outil efficace pour effectuer des mesures de marées sans avoir à être rattaché à une infrastructure côtière. Ensuite, de par sa fonction de positionnement à l’aide des mesures de phase, elle est potentiellement un outil avantageux par rapport à l’accéléromètre pour mesurer l’amplitude et la période des vagues, particulièrement dans l’optique où il est possible de ne pas requérir à une station de référence pour obtenir une précision de positionnement adéquate. Finalement, le même instrument peut servir à la fois à la mesure des deux phénomènes, soient les marées et les vagues.
Récemment, le Centre Interdisciplinaire de Développement en Cartographie des Océans (CIDCO) a développé un outil nommé HydroBall® qui semble être un appareil prometteur pour la mesure des marées et des vagues. Plus précisément, l’HydroBall, dans sa version d’origine, est une solution autonome d’acquisition de données bathymétriques. Sa petite dimension (diamètre de 40 cm) ainsi que sa légèreté (13 kg) lui procurent un avantage comparatif au sein des instruments de mesures de marées et de vagues déjà existants.
L’objectif de ce mémoire est d’évaluer la qualité des mesures produites par la bouée GNSS qu’est l’HydroBall et de les optimiser dans le contexte de la détermination des marées et des vagues en mettant l’accent sur le traitement GNSS en mode absolu de précision PPP.
1.2. Problématique
La problématique entourant la mesure des marées et des vagues par méthodes de positionnement GNSS peut être divisée en 2 catégories. D’une part, il y a les problèmes associés à l’environnement physique qui entoure la bouée et d’autre part, ceux inhérents à la méthode de positionnement GNSS.
Regardons d’abord la problématique associée à l’environnement physique entourant la bouée GNSS. Plus particulièrement, le roulis et le tangage auquel la bouée fera face peuvent engendrer une perte des signaux GNSS ou encore une diminution drastique de la qualité du positionnement. En effet, lorsqu’elle est à l’eau, la bouée est soumise à plusieurs facteurs pouvant faire rouler et tanguer celle-ci; on n’a qu’à penser à la houle, aux vents ou encore au trafic maritime. Dans le pire des cas, des mouvements trop brusques peuvent engendrer
5
une coupure des signaux GNSS pouvant causer une diminution de la qualité de la géométrie des satellites observés par l’antenne GNSS, autrement dit engendrer de mauvais facteurs DOP (Dilution Of Precision). Dans le même ordre d’idée relié au roulis et au tangage de la bouée, une autre problématique est le report précis (et à faible coût) du centre (électrique) de l’antenne GNSS au niveau de la ligne de flottaison de la bouée. En effet, puisqu’on cherche à effectuer une mesure du niveau d’eau, il faut déterminer précisément le bras de levier (excentrement vertical) séparant l’antenne GNSS et la ligne de flottaison. L’ancrage de la bouée peut aussi être une problématique, car le poids de la chaîne et du crapaud servant d’ancrage peuvent exercer une force verticale variable sur la bouée ayant pour effet d’enfoncer la bouée dans l’eau (changeant ainsi sa ligne de flottaison). Enfin, il faut être en mesure d’éviter toute interférence électronique à l’intérieur de la bouée en plus de déterminer l’effet de l’absorption par la coque des signaux GNSS pouvant dégrader le positionnement vertical GNSS (Braun et al. 1997).
Regardons ensuite la problématique qui est intrinsèquement associée au système de positionnement GNSS. D’une part, il y a l’impact de l’éloignement des stations de référence en mode de positionnement relatif. De plus, sachant qu’il est possible d’obtenir une précision centimétrique avec un positionnement relatif GNSS, on peut se demander dans quelle mesure un traitement en mode absolu pourra fournir une précision de positionnement semblable avec un récepteur GNSS unique (en mode absolu). Cela permettrait d’avoir entre les mains un outil de mesures utilisable en tout lieu (aquatique) du globe sans contrainte d’accès aux observations GNSS d’une station de référence à proximité tel que requis en mode relatif. D’autre part, l’impact de la cadence d’observations du récepteur, de la capacité d’enregistrement et de l’autonomie en énergie électrique de la bouée constitue une autre problématique à tenir en compte. Par exemple, si on veut être en mesure d’observer un phénomène comme les vagues, il faut pouvoir utiliser un récepteur GNSS capable de collecter des mesures fréquemment, soit plusieurs fois par seconde. De plus, la capacité de stockage de la bouée devient un enjeu dans l’optique où on projette d’effectuer des mesures avec la bouée sur une longue période de temps. Enfin, l’autonomie de la bouée devient un enjeu dans le contexte où on souhaite effectuer des mesures de marées sur un cycle lunaire complet (durée de 1 mois) et éventuellement plus longtemps.
1.3. Hypothèses générales de recherche et objectif
La question générale qui sous-tend ce projet de recherche peut se formuler comme suit : une bouée GNSS (en l’occurrence l’HydroBall® développée par le CIDCO), caractérisée par sa fonction de positionnement peut-elle représenter un instrument adéquat de mesure des marées et des vagues? Dans un premier temps, peut-elle effectuer la mesure des marées avec la même exactitude que celle d’un marégraphe? Dans un deuxième temps, peut-elle mesurer les vagues avec une exactitude et un taux d’enregistrement suffisants?
6
Premièrement, l’HydroBall, de par sa fonction de positionnement de son récepteur GNSS, peut mesurer avec une résolution spatiale et temporelle suffisante les vagues. Elle peut le faire en mode relatif et en mode absolu. Pour le mode relatif, on parle de Post Processed Kinematic (PPK) puisque la bouée n’est pas équipée (dans sa version actuelle) des modules nécessaires pour le traitement en temps réel (RTK). Pour le mode absolu, on parle de positionnement ponctuel précis (PPP). Ces 2 modes de traitements GNSS possèdent des avantages et des inconvénients quant à leur utilité pour répondre au besoin de la mesure de l’amplitude et de la période des vagues qui seront présentées dans la méthodologie.
Deuxièmement, la bouée GNSS qu’est l’HydroBall peut mesurer les niveaux d’eau avec la même exactitude que celle d’un marégraphe. Elle peut le faire tant en mode relatif qu’en mode absolu. De la même façon que pour les vagues, ces 2 modes de traitement GNSS possèdent des avantages et des inconvénients quant à leur utilité pour répondre au besoin de détermination des marées qui seront présentées dans la méthodologie. Notons que l’utilisation du mode de traitement PPK sera faite principalement afin de valider la qualité du mode de traitement PPP lequel est a préconisé dans le cadre de cette étude.
L’objectif de ce mémoire est d’évaluer la qualité des mesures produites par une bouée GNSS et de les améliorer dans le contexte de l’évaluation des marées, de l‘amplitude et de la période des vagues. Suivant les hypothèses générales de recherche, cet objectif peut donc se décliner en deux parties, selon qu’il s’agisse des marées ou des vagues :
• Parmi les différentes méthodes de traitement GNSS dont il est fait mention dans les hypothèses générales de recherche concernant la mesure de l’amplitude et de la période des vagues, le mode absolu (PPP) sera-t-il à même de fournir une mesure avec un taux d’échantillonnage et une exactitude suffisamment élevés pour déterminer l’amplitude et la période des vagues?
• Parmi les différentes méthodes de traitement GNSS dont il est fait mention dans les hypothèses générales de recherche concernant la mesure des marées, le mode absolu (PPP) sera-t-il à même de fournir une mesure de même exactitude qu’un marégraphe?
7
1.4. Méthodologie
La Figure 1.2 présente un diagramme montrant les grandes étapes de la réalisation de ce projet. Une description plus complète de la méthodologie s’en suit.
8
1.4.1. Étape 1 - Modifications, mesures et vérifications de l’HydroBall
La première étape de la méthodologie représente les différentes modifications, mesures et vérifications effectuées sur la bouée GNSS. Le Chapitre 3 (Aspects techniques) donne les explications détaillées à ce sujet. Premièrement, des modifications techniques ont été apportées à l’HydroBall. Le centrage et la stabilisation de l’antenne au sein de la bouée, l’abaissement de l’électronique du récepteur GNSS dans la coque et l’ajout d’un cylindre de batteries dans un socle externe à la bouée pour le test longue durée sur la mesure des marées. Ces modifications sont présentées en détail à la section 3.1. Deuxièmement un système d’ancrage conçu et adapté pour la mesure des marées et des vagues a été mis de l’avant. Plus de détails sont fournis à la section 3.2 (Système d’ancrage). Troisièmement, une technique de la détermination de la ligne de flottaison de la bouée a été développée. Celle-ci est essentielle puisqu’elle permet d’établir le bras de levier (distance à la verticale) qui existe entre le centre de phase de l’antenne GNSS et la surface de l’eau. La section 3.3 (Ligne de flottaison) présente la technique en question. Finalement, des essais extérieurs en milieu contrôlé ont été effectués. On note d’une part les tests de vérification sur le toit du PEPS, ayant pour but d’analyser la qualité des signaux GNSS afin de quantifier l’effet de l’absorption des signaux GNSS par la coque de la bouée sur la dégradation (ou non) de la position verticale de l’antenne. D’autre part, des tests ont été faits près du fleuve Saint-Laurent au Parc nautique de Cap-Rouge afin d’évaluer le comportement de l’HydroBall en milieu maritime suite aux modifications lui ayant été apportées. Plus de détails sont fournis à la section 3.4 (Tests de vérification et essais préliminaires).
1.4.2. Étape 2 - Acquisition des données
La deuxième étape de la méthodologie consiste en l’acquisition des données. Cette étape a été faite en deux temps : d’abord l’acquisition de données pour les vagues au Laboratoire Hydraulique Environnemental de l’INRS et ensuite l’acquisition des données pour les marées au Port de Rimouski.
Les mesures des vagues ont été faites le 9 septembre 2016. Le canal hydraulique de l’INRS permet de simuler des vagues avec une amplitude et une fréquence qu’on peut générer et mesurer très précisément à l’aide de capteurs ultrasons. À titre indicatif, mentionnons qu’à Rimouski, pour la dernière année, les vagues ont présenté une amplitude moyenne de 0.6 m et une période moyenne de 1.8 seconde selon le site de l’Observatoire global du Saint-Laurent (OGSL 2016). À travers le monde, l’amplitude et la période des vagues peuvent varier énormément et atteindre des valeurs spectaculaires. Par exemple, lors de tempêtes extratropicales dans l’océan Atlantique Nord, on peut observer des vagues de plus de 14 mètres et des périodes allant jusqu’à 25 secondes (Hanafin et al. 2012). Ainsi l’infrastructure d’envergure mondiale qu’est le canal hydraulique de l’INRS se présente comme un site de choix pour y comparer les mesures des vagues faites par la bouée GNSS. Plus de détails sur l’acquisition des données des vagues sont donnés au début du Chapitre 4.
9
Les mesures de niveau d’eau, quant à elles, ont été effectuées au port de Rimouski. Cet emplacement est un endroit de choix afin d’effectuer ces mesures et ce, pour plusieurs raisons. Premièrement, le port de Rimouski abrite un marégraphe. Ce dernier fait partie du Système d’information sur les niveaux d’eaux côtières et océaniques (réseau SINECO) qui est géré par le Service hydrographique du Canada. Le marégraphe de Rimouski offre une précision de mesure d’environ 1 cm selon (Tessier 2015) pour lequel il sera possible d’avoir facilement accès aux données. C’est à ce marégraphe que l’on comparera l’exactitude des mesures de la bouée GNSS. Plus de détails sur l’acquisition des données sont présentés au début du Chapitre 5.
1.4.3. Étape 3 - Traitements des données et comparaison des résultats
La troisième étape de la méthodologie consiste aux traitements des données GNSS préalablement recueillies. Tout d’abord, il convient de donner quelques précisions au niveau des types de traitements GNSS qui seront utilisés, ainsi que sur le GNSS lui-même. Premièrement, il est important d’expliquer la différence entre le système GPS et GNSS. Le premier est un système de positionnement global basé sur les signaux provenant uniquement des satellites américains GPS tandis que le deuxième est un système de positionnement global qui inclut tant les signaux GPS (américain), que GLONASS (russe), Galileo (européen), BeiDou (chinois) ou encore d’autres systèmes régionaux (UNAVCO 2015). Dans le cadre de cette étude, on utilisera les signaux GPS et GLONASS puisque ce sont les deux seules constellations actuellement complètes. Deuxièmement, la possibilité d’utiliser un récepteur GNSS bi-fréquence est avantageux puisque la combinaison linéaire des mesures sur L1 et L2 permet d’éliminer l’effet ionosphérique et favorise par conséquent la qualité de positionnement pour les traitements en mode absolu et relatif (lorsque la station de référence est distante de plus de 10 km). Troisièmement, le mode relatif (PPK) implique un positionnement nécessitant un 2e récepteur sur un point
connu. La qualité du positionnement est influencée par la distance séparant les deux récepteurs. On parle d’un rayon pouvant aller jusqu’à 15 km afin d’obtenir un positionnement centimétrique (Santerre 2013). Quatrièmement, le mode absolu de précision, aussi appelé positionnement ponctuel précis (PPP) permet un positionnement sans station de référence GNSS. Celui-ci se base sur les éphémérides et les corrections d’horloge précises des satellites. Les levés géodésiques du Canada (RNCan) offrent un outil pour le calcul des positions en mode absolu précis qui se nomme SCRS-PPP. Pour le moment, il supporte seulement le traitement des données en différé (post-traitement) en plus de requérir un long temps de convergence avant de pouvoir obtenir un positionnement de précision centimétrique. Finalement, il est intéressant de présenter le positionnement relatif temporel (PRT ou TRP en anglais), mode de traitement principalement développé au Département des sciences géomatiques de l’Université Laval, qui utilise un mode absolu autonome. Ce dernier constitue un mode de traitement intéressant pour les vagues de par son principe de fonctionnement qui est basé sur la différence de phase par rapport à une époque de référence. La Figure 1.3 illustre ce principe. Le TRP (Time Relative Positioning) peut fournir un positionnement temporel (i.e., un déplacement) centimétrique pour un intervalle de temps court (de quelques minutes).
10
Figure 1.3 : Développement du positionnement relatif temporel GPS (Kirouac 2011).
Pour le traitement de données GNSS, on mettra l’accent sur le traitement en mode absolu précis (PPP) en raison de l’immense avantage que représente la possibilité de se positionner partout sur le globe à l’aide d’un seul récepteur GNSS. Pour le traitement des données en mode relatif (principalement utilisé pour la validation de la qualité du PPP), on emploie le mode PPK (à l’aide d’une station de référence à proximité de la bouée). Mentionnons que le TRP se présente aussi comme un outil prometteur pour la mesure des vagues et fait présentement l’objet de développement et d’amélioration au Département des sciences géomatiques de l’Université Laval. Cette méthode adaptée à la mesure des vagues sera décrite dans (Chouaer 2017). Le Chapitre 2 présente en détails ces modes de traitements GNSS. En résumé, l’accent sera mis, pour l’ensemble des traitements des données, sur le mode absolu précis (PPP) considérant l’immense avantage qu’implique la possibilité d'effectuer des mesures à l’aide d’un seul récepteur, tel que souligné.
On termine la troisième étape de la méthodologie par l’analyse des séries temporelles GNSS décrivant les marées et les vagues. Pour les marées, on utilise un algorithme de lissage (moyenne mobile) afin de pouvoir comparer l’exactitude des niveaux d’eau mesurées à ceux du marégraphe. Le graphique de Van de Casteele (André et al. 2013) constitue une façon de comparer les niveaux d’eau provenant d’instruments de mesures différents. L’utilisation de l’outil TCWL-Tools (Foreman 1996) du SHC permet d’intégrer les niveaux d’eau mesurés par la bouée GNSS et d’analyser les principales composantes harmoniques du signal de marée. Des comparaisons sont faites entre le signal de marée mesuré par la bouée GNSS et celui officiel (mesuré sur un peu plus de 14 ans par le marégraphe de Rimouski) du SHC. Pour le signal des vagues, on procède à l’ajustement d’un modèle de régression sinusoïdale auquel on compare les paramètres d’amplitude et de période mesurées par l’HydroBall à ceux mesurer par les jauges ultrasons du canal de l’INRS ainsi que des comparaisons directes par rapport aux jauges et avec l’interpolation spatiale entre celles-ci lorsque requise.
11
Sans se vouloir une liste exhaustive d’applications où la mesure des marées et des vagues est utile, ce chapitre permet aussi de saisir le contexte dans lequel se situe ce projet de recherche. On présente, dans la section suivante, différents documents et études qui sont en lien avec la mesure des marées et des vagues.
1.5. Bouées GNSS pour la mesure des niveaux d’eau
Comme déjà mentionné à la section 1.1.2 (Mesures conventionnelles des marées et des vagues), l’utilisation d’une bouée GNSS afin de mesurer les marées comporte plusieurs avantages sur les marégraphes actuellement utilisés. L’engagement de plusieurs groupes de recherche, compagnies privées et organismes gouvernementaux démontre le fort engouement entourant l’émergence des bouées GNSS. Cela laisse présager un vaste potentiel d’utilisation des bouées marégraphiques. D’ailleurs, la publication de plusieurs articles dans différents journaux scientifiques à travers le monde en témoigne. On retrouve principalement ces articles dans des journaux spécialisés dans le domaine de l’hydrographie, des sciences de la mer ou encore dans le domaine de la géodésie et du GPS (GNSS). Les prochaines sous-sections traiteront d’abord de la comparaison de 2 principaux travaux d’importance concernant la mesure des marées, ensuite d’études montrant différentes applications de la mesure des marées et finalement une liste de compagnies privées s’étant investies dans le domaine. La présentation de ces différentes études permettra de positionner ce projet de recherche dans ce contexte ainsi que de montrer l’innovation des bouées marégraphiques, particulièrement la bouée HydroBall® développée par le CIDCO.
1.5.1. Comparaison de 2 travaux d’importance
Cette sous-section compare ce présent projet de recherche avec 2 principaux travaux réalisés dans le cadre de la mesure des niveaux d’eau à l’aide de bouées marégraphiques. Préciser ces différences permet de faire progresser les recherches en évitant la redondance et en permettant de choisir une direction complémentaire aux travaux déjà effectués.
Dans un premier temps, un article publié dans la Revue hydrographique internationale en novembre 2013 (André et al. 2013) présente les travaux de 3 organismes français (le Service hydrographique et océanographique de la Marine SHOM, l’Institut National des Sciences de l’Univers INSU et l’Institut de Physique du Globe de Paris IPGP) ayant développé des bouées GPS, dont les mesures ont été comparées à celles d’un marégraphe. Ces bouées françaises sont des outils de comparaison intéressants. D’ailleurs, il convient de présenter ces bouées afin de pouvoir mettre en évidence les principales différences entre l’HydroBall et celles-ci.
12
Figure 1.4 : Trois bouées GPS françaises de gauche à droite ; SHOM, INSU et IPGP (André et al. 2013).
La bouée SHOM (Figure 1.4, gauche) a été conçue pour mesurer avec précision l’altitude ellipsoïdale de la surface de l’eau. Elle possède une autonomie de 10 jours pour un poids de 65 kg et une surface de sa base triangulaire qui avoisine 2.5 m2. De plus, celle-ci comporte des flasques de stabilisation d’un mètre de diamètre
qui permettent de réduire les mouvements de hautes fréquences de la surface de l’eau. Son antenne GPS est située à près d’un mètre au-dessus de la surface de l’eau. La bouée INSU (Figure 1.4, centre) est une version améliorée d’une bouée initialement conçue par une équipe australienne pour le calibrage de mesures altimétriques par satellites. Elle possède 5 jours d’autonomie pour un poids de 20 kg (la plus légère des 3 bouées) et un diamètre de 2 mètres. Une toile est tendue entre les 3 extrémités de la bouée pour améliorer sa stabilité. L’antenne GPS est située à 0.34 m de la surface de l’eau. Finalement, la bouée IPGP (Figure 1.4, droite) a été conçue pour des projets de géodésie terrestre et marine exigeant des mesures précises de la hauteur d’eau. Elle possède 3 jours d’autonomie pour un poids de 30 kg et un diamètre de 0.75 m. Un cylindre sous l’antenne accueille les batteries et les composantes électroniques de la bouée. Sa forme cylindrique et son poids relativement lourd sont destinés à éviter les risques de chavirage en haute mer. L’antenne GPS est à environ 0.15 m au-dessus de la surface de l’eau, le plus petit bras de levier des 3 bouées françaises. Le Tableau 1.1 présente un résumé les dimensions et les caractéristiques principales de ces 3 bouées.
Tableau 1.1 : Dimensions et caractéristiques principales des 3 bouées françaises (André et al. 2014).
Bouée Poids Diamètre d’antenne Hauteur Autonomie Récepteur Antenne
SHOM 65 kg 2.5 m 0.93 m 10 jours Trimble SPS852 GNSS Leica AT504GG choke ring
INSU 20 kg 2 m 0.34 m 5 jours TOPCON GB1000 PG-A1 avec plan de masse
IPGP 30 kg 0.75 m 0.15 m 3 jours TOPCON GB1000 PG-A1 avec plan de masse
Il est intéressant de faire valoir les principales caractéristiques qui différencient la bouée GNSS HydroBall aux 3 autres bouées présentées précédemment. Premièrement, il y a l’ajout d’un système de stabilisation (section
13
3.1) au niveau de l’antenne GNSS qui est placée à l’intérieur de l’HydroBall, ce qui n’est pas présent chez les bouées françaises. Deuxièmement, il y a l’abaissement de l’antenne GNSS le plus près possible de l’eau afin de diminuer le bras de levier entre la ligne de flottaison de la bouée et l’antenne GNSS (< 6 cm), voir section 3.3. Ce bras de levier est plus grand chez les bouées françaises, il atteint 93 cm pour la bouée du SHOM. Troisièmement, le système d’ancrage (section 3.2) utilisé au niveau de l’HydroBall permet d’éviter toute force de tension engendrée par le mouillage sur l’HydroBall. Précisons que pour la bouée du l'INSU, il est fait mention d’une force de tension exercée par le mouillage ayant possiblement courbé le cadre de la bouée affectant ainsi les mesures. Quatrièmement, l’ajout d’un cylindre de batteries sous l’HydroBall (section 3.1) permet une autonomie de plus d’un mois, ce qui est plus que l’autonomie qui varie de 3 à 10 jours pour les bouées françaises. Ce cylindre de batteries joue aussi un rôle de stabilisation de la bouée pour réduire les mouvements de hautes fréquences à la surface de l’eau. De plus, il permet de mettre du poids sous la bouée afin d’éviter que celle-ci ne chavire, dans la même optique que celle de la bouée IPGP. Cinquièmement, l’utilisation du système GNSS au sein de l’HydroBall inclut les observations des constellations GPS et GLONASS (section 3.1) afin d’augmenter le nombre d’observations et donc d’améliorer la qualité du positionnement. Les bouées françaises n’utilisaient que le système de positionnement GPS. Toutefois, la petite taille et le faible bras de levier entre l’antenne GNSS et la ligne de flottaison de l’HydroBall se présentent aussi comme des points faibles de la bouée. Sa petite taille la rend vulnérable aux intempéries et la faible hauteur entre l’antenne GNSS et la ligne de flottaison augmente les risques d’obstruction du signal GNSS par de hautes vagues.
Dans un second temps, un rapport intitulé « GPS Water Level Buoy for Hydrographic Survey Applications » (Riley et al. 2014) a été rédigé pour le compte des organismes américains que sont National Ocean Service (NOS) et Office of Coast Survey (OCS). Ce document présente le déploiement de bouées hydrographiques sur la côte est de l’état de Virginie aux États-Unis. Il se veut une démonstration de faisabilité qui prend la forme d’un rapport détaillé contenant l’ensemble de la démarche suivie (et aussi les résultats) afin d’établir un réseau de bouées marégraphiques aux fins d’acquisition de données hydrographiques.
Il convient de mettre en évidence les principales différences entre l’HydroBall et les bouées utilisées dans ce projet américain. Pour ce faire, voici les principales caractéristiques des bouées utilisées. Ce sont des bouées de type Hydrolevel développées par la compagnie AXYS Technologies Inc. Plus précisément, c’est le modèle Hydrolevel Mini qui a été utilisé et qui est présenté à la Figure 1.5. De par sa taille, ce modèle de bouée se veut facilement déployable par deux personnes à partir d’un navire de petite dimension.
14
Figure 1.5 : Bouée Hydrolevel Mini de la compagnie AXYS Technologies Inc. (Riley et al. 2014).
Ce modèle mesure 0.6 m de diamètre pour un poids 71 kg pour sa configuration comportant la plus grande autonomie (donc un plus grand nombre de batteries). Dans le cadre de l’étude menée par la NOAA, des modifications au système de batteries et au système d’alimentation ont été faites au modèle Hydrolevel Mini pour lui fournir une autonomie de près de 50 jours pour un poids total de 73 kg. On note aussi l’ajout de batteries et le remplacement de certaines composantes électroniques moins énergivores. Ainsi cette bouée est munie d’un récepteur GPS Ashtech MB100 (L1/L2) consommant moins d’un watt et d’une centrale d’attitude (LORD Corp. MicroStrain 3DM-GX1), mesurant le roulis, le tangage et l’azimut qui est peu énergivore. Une antenne et un modem Iridium sont aussi présents afin de pouvoir transmettre périodiquement les données à l’utilisateur. Il est intéressant de mentionner qu’un message courriel envoyé via Iridium (réseau de satellites de communication) peut être transmis à l’utilisateur dans le cas où la bouée s’éloignerait de l’endroit initial de son ancrage. L’ensemble de ses composantes est contrôlé par l’ordinateur de bord Watchman500 et stocké dans le lecteur Compact Flash (tous deux développés par la compagnie AXYS). Comme illustré à la Figure 1.5, l’antenne GPS (dont le modèle n’est pas spécifié dans le rapport) est placée à l’extérieur de la bouée, ce qui augmente le bras de levier entre la ligne de flottaison et celle-ci et qu’on peut estimer à l’aide de la figure à quelques dizaines de centimètres. L’utilisation du logiciel de traitement Applanix POS GNSS permet de coupler les mesures de la station inertielle à celles du GPS afin de corriger l’impact du bras de levier entre l’antenne GPS et la ligne de flottaison suite au roulis et au tangage de la bouée. On indique un temps de traitement de plus de 20 minutes pour 24h d’observations. Par ailleurs, de l’information est aussi fournie dans ce document à propos du système d’ancrage utilisé. La Figure 1.6 illustre ce dernier. À ce sujet, le rapport indique qu’en raison des courants marins, une tension dans la ligne de mouillage peut engendrer le calage de la bouée dans l’eau affectant ainsi la détermination du niveau réel de la surface de l’eau.
15
Figure 1.6 : Configuration de l'ancrage de la bouée Hydrolevel Mini (Riley et al. 2014).
Plusieurs caractéristiques différencient la bouée AXYS de la bouée HydroBall. Premièrement, la dimension des 2 bouées. L’HydroBall mesure environ 0.4 m de diamètre et pèse ~16 kg (85 kg avec l’ajout du cylindre de batteries) alors que la bouée AXYS a un diamètre de 0.6 m et pèse 73 kg (les batteries étant incluses dans la coque sphérique de la bouée).
Deuxièmement, l’antenne de l’HydroBall se trouve à l’intérieur de la coque de la bouée ce qui n’est pas le cas pour la bouée AXYS qui a son antenne GPS à l’extérieur. L’antenne GPS sur la bouée AXYS n’est donc pas stabilisée et n’est pas aussi proche de la ligne de flottaison de la bouée (quelques dizaines de centimètres) que celle dans l’HydroBall (< 6 cm). Comme mentionné, la bouée Hydrolevel Mini utilise le logiciel de traitement Applanix POS GNSS afin de prendre en compte les mesures de la station inertielle pour corriger l’impact de la variation du bras de levier entre l’antenne GPS et la ligne de flottaison qui affecte le report de la mesure des hauteurs GPS à la surface de l’eau. Le résultat du traitement Applanix POS GNSS est lissé et filtré permettant d’obtenir ce qui est appelé le SBET (Smoothed Best Estimate of Trajectory). L’utilisation de ce logiciel implique des coûts élevés puisqu’une dispendieuse centrale d’attitude intégrée à la bouée est requise. De plus, ce couplage implique un traitement des données qui est lourd et une plus grande complexité d’intégration des composantes électroniques dans la bouée. En diminuant le bras de levier entre la ligne de flottaison de la bouée et l’antenne GNSS de l’HydroBall, l’impact du roulis et du tangage sur celui-ci est diminué permettant d’éviter l’utilisation d’un logiciel comme Applanix POS GNSS et une station inertielle. De cette façon, les coûts de la bouée et la complexité des traitements sont réduits tout en simplifiant l’intégration des composantes
16
électroniques de la bouée HydroBall. Plus précisément, les mesures faites par cette dernière sont corrigées d’une constante qui est la mesure verticale entre l’antenne GNSS et la ligne de flottaison de la bouée (tel que décrit à la section 3.3).
Troisièmement, les expérimentations ont été faites à l’aide d’observations GPS et non GNSS (GPS+GLONASS) comme c’est le cas de l’HydroBall. L’avantage d’effectuer des observations sur ces deux constellations permet une plus grande redondance d’observations GNSS pour un meilleur positionnement, particulièrement dans des conditions d’observations défavorables où les forts mouvements de roulis et de tangage de la bouée peuvent entrainer une perte de signal sur certains satellites.
Quatrièmement, le système d’ancrage utilisé comme pour les expérimentations à Rimouski se différencie de celui décrit dans le rapport de la NOAA et est potentiellement utile pour limiter les forces que peuvent engendrer le mouillage de la bouée. Plus de détails sur notre système de mouillage sont présentés à la section 3.2 (Système d’ancrage).
Finalement, la simplicité de fonctionnement de l’HydroBall présente un avantage de coût et de temps de traitement face à la complexité des composantes de la bouée AXYS. Le traitement GNSS des données récoltées par l’HydroBall est plus rapide, plus simple et moins coûteux comparativement aux traitements GPS couplés à une station inertielle par le logiciel Applanix POS GNSS. D’un autre côté, la bouée Hydrolevel Mini est avantagé par rapport à l’HydroBall. D’abord en raison de son autonomie élevée pour un poids relativement léger et ensuite puisqu’elle peut communiquer de l’information et des données via un lien satellitaire Iridium. Précisons que son système d’alimentation combine des batteries de type Lithium Thionyl Chloride (60 batteries LiSOCl2) non
rechargeables pour un coût de 480$ (USD) par déploiement et des batteries Lithium Fer Phosphate (2 batteries LiFePO4 particulièrement légères pour l’énergie emmagasinée) qui sont rechargeables pour un total de 2000$
(USD). Une cinquantaine de jours d’autonomie sont possibles sous cette configuration d’alimentation.
1.5.2. Établissement de système de référence vertical et modèle de séparation
Cette sous-section présente différents travaux de recherche qui mettent de l’avant l’utilisation de bouées GNSS (GPS).
Dans Bisnath et al. (2004), Dodd et al. (2009) et Hocker & Wardwell (2010), les bouées GNSS sont utilisées dans le domaine de l’hydrographie, pour l’établissement de système de référence vertical et l’établissement de modèle de séparation entre l’ellipsoïde et le zéro hydrographique des cartes marines. En effet, les bouées GNSS s’avèrent un outil de choix dans le contexte de levés hydrographiques où il est impossible d’avoir accès à des mesures d’un marégraphe local ou de pouvoir en installer un de façon temporaire (Dodd et al. 2009). Plusieurs facteurs peuvent rendre l’installation d’un marégraphe temporaire impossible, comme l’éloignement de la côte, la profondeur de l’eau ou encore des raisons de sécurité liées à un environnement hostile (Bisnath et al. 2004).
17
Les bouées GNSS peuvent aussi devenir un outil de mesures complémentaire au marégraphe, principalement pour la validation et l’amélioration de modèles de séparation entre l’ellipsoïde géodésique et le zéro des cartes marines. En effet, comme il en est mention dans Byrne et al. (2009), lors de levés hydrographiques, l’approche ERS (Ellipsoidal Referenced Survey) simplifie grandement les opérations de levés en limitant le besoin en infrastructure côtière pour la mesure de niveau d’eau tout en permettant la production des résultats dans un délai de temps tactique. Le développement de modèle de séparation avec l’ellipsoïde peut s’effectuer de plusieurs façons, notamment en intégrant des valeurs de marégraphes, des modèles de géoïde, de topographie de la mer et hydrodynamiques. On peut nommer certains modèles de séparations établis par différents organismes nationaux comme la NOAA (National Oceanic and Atmospheric Administration) par l’entremise du VDatum1 et l’UKHO (United Kingdom Hydrographic Office) avec le VORF2 (Vertical Offshore Reference Frame).
Les mesures faites par les bouées GNSS permettent donc d’enrichir ces modèles de séparation (Dodd & Mills 2011). D’ailleurs la publication de Hocker & Wardwell (2010) est un exemple qui montre l’utilisation de bouées GNSS afin d’établir et d’évaluer l’exactitude de modèles de séparation avec l’ellipsoïde de référence.
1.5.3. Hydrologie
Les bouées GNSS trouvent aussi application dans le domaine de l’hydrologie. On peut citer Apel et al. (2012) ou encore Hostache et al. (2015) qui ont établi le potentiel d’utilisation des bouées GNSS dans ce domaine, où les mesures faites peuvent être inclues au sein de différents modèles hydrodynamiques par exemple.
Citons Valk et al. (2014) qui présentent l’utilité des bouées GNSS pour déterminer l’étale de marées. Par exemple, mentionnons que la détermination de l’étale de marées est utile pour un calibrage plus précis de modèles hydrauliques. Aussi les bouées GPS sont moins coûteuses que les profileurs de courant acoustique Doppler (ADCP) et sont en mesure de fournir une information valable permettant de contraindre des modèles de marées (Valk et al. 2014).
1.5.4. Niveau de la mer
Cette sous-section présente diverses études utilisant les bouées GNSS pour la détermination du niveau de la mer. Dawidowicz (2014) présente, entre autres, les avantages que les bouées GNSS peuvent procurer. Parmi ceux-ci se trouve l’importance d’effectuer des mesures absolues, en référence au centre de la Terre, ainsi que la possibilité de mesurer sur une période et une échelle de temps impossible à atteindre par altimétrie satellitaire. En effet, puisque les satellites altimétriques sont en orbite autour de la Terre, la répétabilité de la mesure pour un endroit ponctuel dépend de la période de l’orbite de celui-ci. Ainsi la résolution temporelle pour des satellites altimétriques comme ERS-2, Envisat, SARAL/AltiKa est de 35 jours et de 10 jours pour des satellites comme
1 https://vdatum.noaa.gov/
18
TOPEX/Poseidon, Jason-1 et Jason-2 (Schwatke et al. 2015). Une bouée GNSS n’a pas cet handicap puisqu’elle effectue des mesures au même endroit de façon continue. Finalement, les bouées GNSS peuvent également être utilisées pour cartographier le géoïde marin (Dawidowicz 2014). Dans Fund et al. (2013) l’accent est mis sur l’observation de la surface de la mer à l’aide d’une bouée GPS en utilisant le positionnement ponctuel précis (PPP). D’autres articles comme celui de Bouin et al. (2009) présentent une méthodologie pour améliorer la résolution locale de modèles de niveau moyen de la mer en cartographiant la surface de la mer à une haute résolution à l’aide de bouées GPS. La thèse de doctorat de Watson (2005) présente aussi l’utilisation de bouées GPS comme un outil de calibrage et de validation pour les missions satellitaires altimétriques comme TOPEX-Poséidon et maintenant Jason-3.
1.6. Bouées GNSS pour la mesure des vagues
Pour débuter cette section, il est intéressant de présenter le contexte qui a conduit à l’utilisation d’un récepteur GNSS pour mesurer les vagues dans le cadre de ce projet de recherche. L’idée initiale du projet était de mesurer uniquement les marées à l’aide d’une bouée GNSS. Cependant, nous nous sommes vite rendu compte que l’HydroBall pouvait tout aussi bien mesurer les vagues à une précision acceptable. En effet, certaines études suggéraient le potentiel d’utilisation de récepteurs GNSS afin de déterminer la hauteur de vagues (Bisnath et al. 2004) à un taux d’enregistrement élevé (10 fois par seconde) pouvant conduire en une description du mouvement des vagues très détaillée. Nos efforts afin d’améliorer la qualité des mesures GNSS au sein de l’HydroBall furent orientés afin de pouvoir effectuer la mesure des 2 phénomènes, soient les marées et les vagues. Le grand nombre d’applications où la mesure des vagues et des marées est utile, élargie considérablement le spectre d’utilisation d’un instrument comme l’HydroBall. Les sous-sections qui suivent permettront de présenter tout particulièrement le contexte entourant la mesure des vagues à l’aide de bouées GNSS.
1.6.1. Mesure des vagues – quelques applications
Tout d’abord, la mesure des vagues s’inscrit dans l’établissement de modèles environnementaux bien souvent utiles à des fins de prévision et de validation météorologiques. Dans un premier temps, il est intéressant de présenter le National Data Buoy Center (NDBC) des États-Unis qui fait partie du National Weather Service (NWS). Le NDBC fait la conception, le développement, l’exploitation et l’entretien d’un réseau de bouées qui collectent une multitude de données environnementales qui incluent entres autres la période et la hauteur des vagues. Ces données sont utilisées par les prévisionnistes du NWS afin d'examiner les conditions de préparation des prévisions météorologiques et de vérifier ces prévisions après leur production (National Data Buoy Center 2012). Précisons aussi la contribution du Coastal Data Information Program (CDIP), qui est un vaste réseau de surveillance des vagues le long des côtes des États-Unis. Cet organisme possède plusieurs capteurs de vagues, dont des bouées de surface de type Datawell, voir Figure 1.7.
19
Figure 1.7: Bouée de type Datawell modèle MkIII munie d’un accéléromètre pour mesurer la houle
(Datawell BV 2017).
Celles-ci sont largement utilisées par cet organisme, présentant l’avantage d’être facilement déployable en plus de transmettre, par lien satellitaire ou radio, les données lors de leur utilisation en zone ultra-côtière. Par exemple, on peut citer (Hanson et al. 2014) qui a présenté un rapport au département des Mines, Minéraux et de l’Énergie de l’état de Virginie pour lequel l’intégration des mesures de vagues est faite à l’aide des bouées de surface de type Datawell. Ce rapport a permis de démontrer le besoin de développer un modèle de prévision des vagues pour supporter le développement de l’énergie éolienne en zone ultra-côtière de la Virginie. Ce modèle de vague est un outil supportant les opérations nécessaires au projet, que ce soit pour la sécurité ou la planification des opérations.
Ensuite, on peut citer l’utilité de la mesure des vagues à des fins récréatives. En effet, grand nombre de plaisanciers, amateurs de surf et de sport nautique utilisent les informations sur les vagues pour planifier leurs sorties en mer. Plusieurs sites internet permettent aux adeptes de ces sports de se renseigner sur les conditions de houle afin de profiter au maximum de leur sortie en mer (Magicseaweed Ltd 2017).
Finalement, il est intéressant de mentionner que le potentiel d’un récepteur GNSS au sein de bouée est utile à des fins de sécurité publique, pour la détection de tsunami, par exemple. En effet, Schöne et al. (2011) présentent l’utilisation d’un réseau de bouées GPS dans un système de détection de tsunami. Plus précisément, cet article fait référence au système nommé « German Indonesian Tsunami Early Warning System » (GITEWS) qui combine la technologie GPS et celle d’enregistreur de pression profonde (ocean bottom pressure-OBP). Cette étude montre que la technologie GPS est suffisamment précise pour détecter des tsunamis d’amplitude plus grande que 10 cm et suggère un taux de réussite acceptable (68% du temps) dans la détection de tsunami d’une amplitude de 5 cm au large pour lequel l’approche des côtes amplifie la hauteur de la vague déferlante. De plus, les niveaux d’eau mesurés par méthode GPS permettent une estimation adéquate du temps d’arrivée ainsi que de l’amplitude du tsunami. Ce réseau de bouées est donc une composante profitable pour l’ensemble