يــــــــملعلا ثحبلاو يــــلاعلا مـــــيلعتلا ةرازو
MINISTÈRE DE L’ENSEIGNEMENT SUPÉRIEUR ET DE LA RECHERCHE SCIENTIFIQUE. يجولونكتلاو موــــــلـعلا ةــــعماج
ـــــ ــــــيضوب دمحم ن ارهوب ا ا
ف
Université des Sciences et de La Technologie d’Oran- Mohamed Boudiaf.
Faculté de Génie Électrique.
THÈSE DE DOCTORAT
Présentée par :
Djilali KAIROUS Thème :
Modélisation, Simulation et Commande d’un Système Éolien a Machine Asynchrone à Double Alimentation
Soutenue le 24 Février 2013 Jury composé de Mrs:
Président : B. MAZARI, Professeur USTO.MB, Oran
Rapporteur : B. BELMADANI, Professeur UHBC, Chlef
Examinateurs : M. BOUHAMIDA, Professeur USTO.MB, Oran
A. BOUHENNA, MC (A) ENSET, Oran
M. CHENAFA, MC (A) ENSET .Oran
REMERCIEMENTS
Je voudrais d'abord exprimer ma gratitude et mes sincères remerciements à mon directeur de thèse, le professeur Bachir BELMADANI, de l’Université Hassiba-Ben-Bouali à Chlef (UHBC), afin de m'avoir accepté dans son équipe d’encadrement et de m’avoir donné une chance unique de repousser les limites de mes ambitions.
Je remercie également le Docteur Mostapha BENGHANEM, enseignant et chercheur à l’USTO.MB, pour les précieux commentaires fournis durant la réalisation de cette thèse.
Je tiens également à remercier:
Le Professeur Benyounes MAZARI enseignant à l’USTO.MB, Oran, président de jury, ainsi que les membres du jury le Professeur Mohamed BOUHAMIDA (enseignant à l’USTO.MB, Oran), le Docteur Abderrahmane BOUHENNA (Maitre de Conférence –A- à l’ENSET, Oran) et le Docteur Mohammed CHENAFA (Maitre de Conférence –A- à l’ENSET, Oran) pour leurs évaluations de mon travail.
Je voudrais remercier Professeur René WAMKEUE de l’UQAT à Canada pour ses nombreux conseils très judicieux au cours des différentes discussions qui vont au fond du sujet.
Je remercie Monsieur Jean-Jacques BEAUDOIN directeur de laboratoire de l’UQAT avec qui j’ai partagé des moments inoubliables sur le sens de travail en groupe et la conservation de sa cohésion.
Je tiens à remercier également Mrs :
Les membres de laboratoire de recherche en machines électriques à l’ENP (Alger), Le professeur Rachid IBTIOUEN, directeur de recherche à l’ENP d’Alger, le Professeur Rachid.
l’université Ciudad Real en Espagne) le Docteur Alfeu JOAOZINHO SGUAREZI FILHO de l’Universidadé Estadual de Campinas du Brézil. Je tiens également à remercier les Professeurs
Ahmed BETTAHAR, Ben-Abdallah ABDI, Miloud TAHAR-ABBES, Larbi LOUKERFI le
Docteur Abdallah BENAROUS ainsi que monsieur le chef de département d’électrotechnique Mr Hadj ALWACHE et tous mes professeurs, mes collègues et mes amis de la faculté de technologie de l’université Hassiba Benbouali de Chlef.
Un remerciement spécial est dédié à mon meilleur ami le Docteur Mourad FOUKA (chercheur au CRAAG à Alger).
Pour terminer, je dédie ce travail à ma famille, particulièrement à ma mère dont le support psychologique m’a permis de surmonter les écueils et difficultés rencontrés tout au long de ce pénible mais intéressant travail de recherche, qu’elle trouve ici toute ma gratitude.
مسب
ّالل
نمحّرلا
ميحّرلا
نَم
ََءٓاَج
َِةَنَسَحۡلٱِب
َ هَلَف
ۥ
َ ر ۡشَع
اَهِلاَث ۡمَأ
َۖ
نَمَو
ََءٓاَج
َِةَئِّيَّسلٱِب
ََلَف
َٓ ىَز ۡج ي
ََّلِّإ
اَهَلۡثِم
َۡم هَو
ََلّ
ََنو مَلۡظ ي
(
٠٦١
)
َۡل ق
ىِنَّنِإ
ىِن ٮَدَه
َٓىِّبَر
َ ىَلِإ
َ طٲَرِص
َ ميِقَت ۡسُّم
ا نيِد
ا مَيِق
ََةَّلِّم
ََميِهٲَرۡبِإ
ا فيِنَح
َۚ
اَمَو
ََناَك
ََنِم
ََنيِكِر ۡش مۡلٱ
(
٠٦٠
)
َۡل ق
ََّنِإ
ىِت َلَص
ىِك س نَو
ََىاَي ۡحَمَو
ىِتاَمَمَو
ََِّ ِلِل
َِّبَر
ََنيِمَل ـَعۡلٱ
(
٠٦١
)
ََلّ
ََكيِرَش
َ هَل
ۥَۖ
ََكِلٲَذِبَو
َ ت ۡرِم أ
َ اَنَأَو
َ لَّوَأ
ََنيِمِل ۡس مۡلٱ
(
٠٦١
)
ماعنلأا
Principales notations utilisées
Chapitre 2 :
: La vitesse du vent .
: Fonction de probabilité de la vitesse du vent. : Facteur d’échelle.
: Un facteur de forme.
: La fonction mathématique Gamma : La fonction de Weibull.
: L’énergie cinétique. : Masse d’air.
: Rayon du capteur de vent. : Densité de l’aire.
: Effort F correspond à la variation de la quantité de mouvement. : Une puissance correspond à la variation de la quantité de mouvement.
: Une puissance réelle.
: Coefficient de puissance ou coefficient de performance.. : L’angle de calage des pales.
: La vitesse relative en bout de pale. : Constante dépend au et
: Vitesse angulaire mécanique. : Vitesse angulaire mécanique référence.
: Le couple mécanique de la turbine, le couple mécanique de la génératrice.
: Le couple électromagnétique. : Le couple résistant. : Le rapport de multiplicateur.
: L’inertie de l’éolien. : L’inertie de la GADA.
: Coefficient de frotement
Chapitre 3 :
Indices s et r : Désigne statore et rotore respectivement.
Indices : d et q : Désigne l’axe direct et l’axe quadrature respectivement. Indices : Désigne les composantes de Concordia.
Indices ref et mes : Désigne référence et mesuré respectivement.
: Puissances active et réactive respectivement. : Puissances références active et réactive
respectivement.
j : nombre complexe ( )
: Inductance mutuelle inductance.
: Résistance. : Inductance propre.
: Nombre de pair des pôles.
, : Constant de temps : statorique et rotorique. : Coefficient de dispersion.
: La fréquence.
: La fréquence de rotation du rotor. : La tension rotorique reportée au stator. : Glissement.
: Le rapport de transformation stator-rotor.
Est le nombre des spires statorique et rotorique respectivement. : Flux.
: Tension rotorique.
:Courant rotorique reporté au stator.
: La matrice de transformation de Park.
: La matrice de transformation inverse de Park.
: L’écart angulaire. : Pulsation. : Matrice d’état. : Vecteur d’état.
U : Vecteur des commandes. : La fonction de transfert.
: Gains proportionnelle et intégral de régulateur PI, respectivement.
: Opérateur de Laplace.
: Tension de bus continue.
: Période d’échantillonnage pour la SVM. : Courant de bus continue.
: L’indice de modulation. : Tension de bus continue. : Capacité de bus continue. Chapitre 4 :
: Nombre réel. : Bite.
: La variation de l’angle.
Nc :Rapport la fréquence d’échantillonnage choisis (Nc). :La période de signale fondamentale.
Chapitre 5 :
: Surfaces de commutation. ̇ : Dérivée de Surfaces de commutation. : Commande (entrée).
: Commande équivalent.
, : Commande maximum et minimum respectivement. : Coefficient de dispertion de la machine.
P : Puissance active. Q: Puissance réactive.
P
S ,SPsurface de glissement liée à la puissance active et puissance réactive respectivement. : Gain de la fonction intégrale.
Chapitre 6 :
L’indice h : Désigne harmonique. L’indice L : Désigne la charge.
L’indice nom : Désigne la valeur nominale.
̅ ̃ : Comparantes continue et harmonique de la puissance active respectivement. ̅ ̃ : Comparantes continue et harmonique de la puissance active respectivement.
: Puissance de référence harmonique active et réactive. : Puissance totale active et réactive.
: Quantité d’énergie cinétique.
Ωvol : Vitesse de rotation du volant d’inertie.
: Contrainte maximale admissible. ρ : La masse volumique du matériau.
- 1 -
TABLE DES MATIÈRES
INRODUCTION GÉNÉRALE ………...……….………...06
CHAPITRE 1: L’ÉNERGIE ÉOLIENNE. L’UTILISATION DE LA GÉNÉRATRICE ASYNCHRONE À DOUBLE ALIMENTATION-GADA- POUR LA PRODUCTION DE L’ÉNERGIE ÉOLIENNE. 1.1 Introduction générale………... 09
1.2 Développement de l’énergie éolienne……….………... 10
1.2.1 Technologie d’éoliens………. 14
1.2.2 Situation actuelle de l’énergie éolienne……….. 16
1.2.3 Tendances actuelles dans le domaine des aérogénérateurs …….. 18
1.2.4 Constitution des aérogénérateurs utilisant la GADA………. 23
1.3 Intégration de la GADA dans un système éolien……… 26
1.4 La GADA en vitesse variable ……… 27
1.5 Performances et commande de la machine GADA…………..………….. 28
1.6 Support de commande en temps réel de la GADA………. 34
1.7 Conclusion…………...………... 38
CHAPITRE 2 : MODÉLISATION DES SYSTÈMES GÉNÉRATEURS ÉOLIENS 2.1 Introduction ……….………... 39
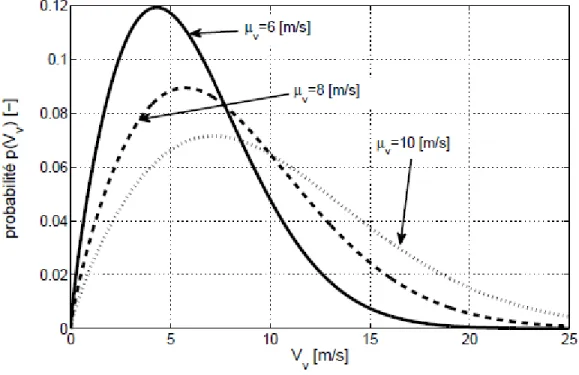
2.2 Modélisation du gisement éolien sur le site de l’aérogénérateur………… 39
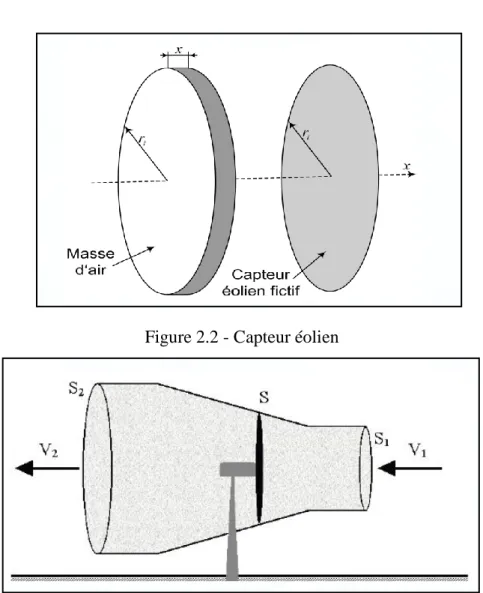
2.3 La conversion de la puissance éolienne………..…… 42
2.3.1 Puissance disponible dans le vent et puissance utilisable…...…… 42 2.3.2 Caractéristiques simplifiées de la puissance d’une turbine
- 2 -
2.3.3 Limitation de la vitesse de rotation de la turbine éolienne………. 47
2.3.4 Caractéristiques de puissance des turbines éoliennes réelles…….. 48
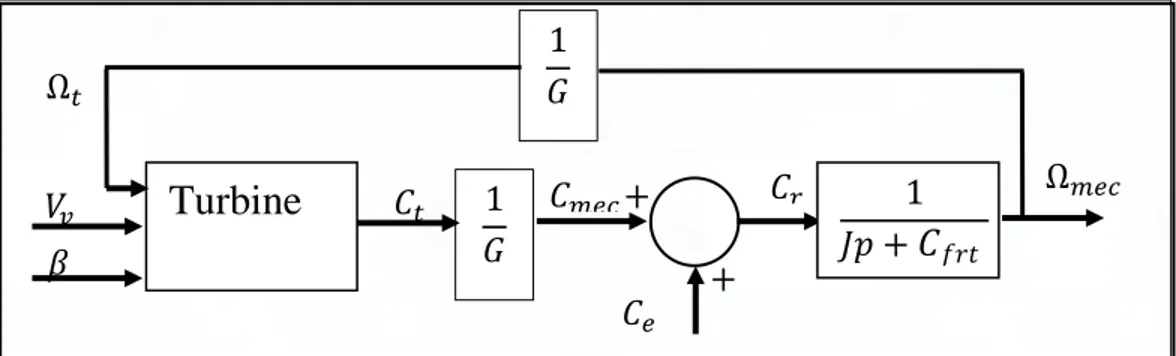
2.4 Modélisation de l’éolienne……….………. 50
2.4.1 Modèle du multiplicateur………... 51
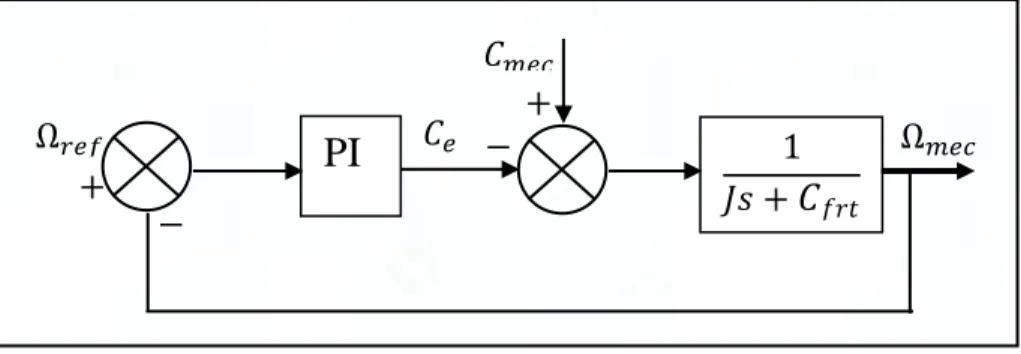
2.4.2 Modèle de l’arbre……….………... 52
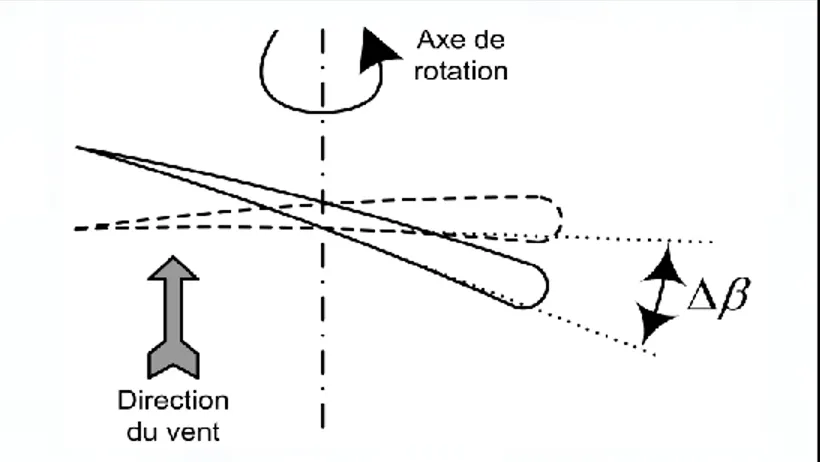
2.5 Contrôle de l’angle des pales « pitch control »………... 52
2.5.1 Contrôle dans la zone basse vitesse……...………....…… 53
2.5.2 Contrôle dans la zone médiane………...………..… 53
2.5.3 Contrôle dans la zone haute vitesse……….…………..… 54
2.6 Conclusion……..……… 55
CHAPITRE 3: MODÉLISATION ET COMMANDE DE LA MACHINE ASYNCHRONE À DOUBLE ALIMENTATION 3.1 Introduction ……….………... 56
3.2 Fonctionnement de la GADA………...……… 57
3.3 Modélisation de la machine asynchrone………. 60
3.3.1 Modèle triphasé de la GADA.………...………… ….…… 60
3.3.2 Modèle biphasé de la GADA………..……… 63
3.4 Les équations de la machine sous forme d’état……….……...… 65
3.5 Commande de la GADA ……… 67
3.5.1 Orientation du flux statorique………...………..…… 68
3.5.2 Relations entre tensions rotoriques et courants rotoriques………. 71
3.6 Commande directe des puissances. ………..………..… 72
3.7 Commande indirecte des puissances.…………..………..……… 73
3.8 Modélisation et commande du convertisseur de puissance côté machine 74 3.9 La stratégie de commande SVM………. 77
3.10 Modélisation et commande du convertisseur de puissance côté réseau…. 83 3.10.1 Commande vectorielle du convertisseur……….……… 83
3.10.2 Modèle de convertisseur côté réseau………...…...… 84
3.10.3 Calcul des régulateurs………...….. 86
3.10.4 Régulateur de tension bus continu………..… 87
- 3 -
3.12 Conclusion……..……… 91
Chapitre 4 : RÉALISATION DU BANC D’ESSAI 4.1 Introduction ……….………... 93
4.2 Présentation du banc d’essai ………….…………...……… 94
4.3 Présentation de la carte ADSP‐BF527 EZ‐KIT ………..…...…… 98
4.3.1 Architecture du processeur ADSP‐BF527……….…………. 100
4.3.2 Les mémoires d’instructions et les mémoires de données ……… 101
4.3.3 Le Core-Timer………...……….……..……… 102
4.3.4 Les ports généraux d’Entrées/Sorties……….. ………...…… 103
4.3.5 Base de temps d’usage général PWM………...……….. 103
4.3.5a Description fonctionnelle des Timers…...……….…... 105
4.3.5b Initialisation des Timers.………….………..…….… 106
4.3.6 L’interface SPI du BF527.………….……... 106
4.3.6a Les lignes du port SPI du BF527………...………... 107
4.3.6b Le signal d’horloge SCK………... 108
4.4 Le convertisseur Analogique/Numérique MCP3204…...……….. 108
4.5 La communication série avec le convertisseur A/D………...….... 109
4.6 Circuit de conditionnement des grandeurs électriques.………..… 110
4.7 Circuit de conditionnement de mesure de la vitesse………... 111
4.8 Circuit de conditionnement des signaux SVM.……….. 113
4.9 Réalisation du code pour commander la GADA……….…...…… 116
4.9.1 Structure du programme……….…….… 116
4.9.2 L’initialisation des interruptions………...….….…… 118
4.9.3 Représentation des données………..……..…… 120
4.9.4 Le système de calcul utilisé……….………... 121
4.10 Génération de SVM………..………..…… 122
4.11 Résultats expérimentaux………. 126
4.11.1 Alimentation de la machine utilisant l’onduleur SVM……….... 126
4.11.2 Connexion du système au réseau………..……….. 129 4.11.3 Fonctionnement en boucle fermée : commande des puissances…. 134
- 4 -
4.12 Difficultés de l’implémentation expérimentale……….. 141
4.13 Conclusion……..……… 142
CHAPITRE 5: COMMANDE AVANCÉE DE LA GADA 5.1 Introduction ……….………... 143
5.2 Généralités sur la commande par mode glissant ………..………... 144
5.3 Conception de la commande par mode de glissement……… 146
5.3.1 La surface de glissement………..………... 147
5.3.2 Calcul de la commande ……….. 148
5.3.3 Commande équivalent……….……... 148
5.3.4 Condition d’existence du mode glissement………. 150
5.3.5 Régime de glissement réel……….. 151
5.4 La logique Floue……….. 152
5.4.1 La fuzzification………... 154
5.4.2 Inférence……….. 154
5.4.3 Déffuzification……….……… 154
5.4.4 Commande hybride, floue - mode de glissement……….. 154
5.5 Commande directe de puissance par mode glissant……… 157
5.6 Résultats de la simulation……….……….. 159
5.7 Test de robustesse……… 166
5.8 Conclusion……..……… 172
CHAPITRE 6 : L’UTILISATION DE LA MADA COMME FILTRE ACTIF ET MOYEN DE STOCKAGE INERTIEL. 6.1 Introduction ……….………... 173
6.2 Filtrage actif...………... 174
6.2.1 Harmoniques et inter-harmoniques……….. 175
6.2.2 Principe du filtrage actif……….. 176
6.2.3 Détermination des références des courants et puissances………... 177
6.2.4 Utilisation de la machine à double alimentations comme filtre actif………...……….. 178
- 5 -
6.2.6 Résultats de simulation………... 180
6.3 Utilisation du MADA en stockage inertiel………... 188
6.3.1 Stockage inertiel………. 188
6.3.2 Stockage par volant d’inertie………..… 189
6.3.3 Avantages et inconvénients du stockage par volant d’inertie……. 191
6.3.4 Comparaison entre les modes de stockage……….. 191
6.3.5 Utilisation de la MADA pour le stockage……… 192
6.3.6 Le contrôle du système SISE associé au générateur éolien……… 195
6.3.6a Calcul de la vitesse de référence……….……….… 196
6.3.6b Calcul du flux de référence……….………. 197
6.3.7 Résultats de simulation………...… 197
6.4 Conclusion ...……….. 201
CONCLUSION GÉNÉRALE ……… 202
ANNEXE……….205
- 6 -
INTRODUCTION GENERALE
L'éolienne à génératrice asynchrone à double alimentation (GADA) est très populaire puisqu'elle bénéficie de certains avantages par rapport à tous les autres types de machines à vitesse variable. En effet, le convertisseur d'énergie utilise, afin de redresser - onduler les courants alternatifs du rotor, une puissance nominale fractionnaire de celle du générateur. Ceci implique moins de pertes par commutations, un coût de production du convertisseur moins élevé et une réduction de la taille des filtres passifs impliquant ainsi une réduction des coûts et des pertes additionnelles.
II existe déjà plusieurs techniques de commande de la GADA dans la littérature. Malheureusement, elles sont complexes et dépendent largement des paramètres de la machine.
Certaines des récentes techniques proposent d'utiliser la GADA afin d'injecter de la puissance réactive dans le réseau électrique. Ceci est dû à l'intérêt des opérateurs de réseaux à génération distribuée d'augmenter la stabilité, la fiabilité et la qualité de l'onde de leur réseau à partir des sites de génération. Certaines études iront même jusqu'à injecter une compensation de courants harmoniques à travers le rotor de la machine afin d'améliorer la qualité de l'onde des réseaux électriques.
II n'est pas clair aujourd'hui que la GADA pourrait être commandée à l'aide d'un algorithme simple, indépendant des paramètres de la machine, tout en permettant à l'éolienne d'améliorer la qualité de l'onde du réseau électrique auquel elle est connectée. II n'est pas non plus certain que la simulation d'un système aussi complexe serait suffisante afin de valider des théories et applications.
Nous voici donc confrontés aux objectifs de notre travail. II consistera à explorer différentes techniques de commande de la GADA. La technique choisie devra être très robuste et
- 7 -
permettre d'utiliser le convertisseur d'énergie afin de compenser n'importe quelle perturbation des courants qui pourraient être occasionnée par une charge non linéaire connectée au réseau. Afin de valider le nouveau système, nous devrons :
- Procéder à des simulations détaillées à l'aide de MATLAB en préparation à 1'implantation en laboratoire.
- Monter le banc d’essai permettant d’alimenter, de mesurer, d’acquisition, et conditionner les différentes grandeurs.
- Contrôler les modules à l'aide de processeurs numériques de signaux discrets programmés en langage assembleur permettant l’acquisition, le traitement et le contrôle du système.
- Concevoir l’interface DSP-convertisseur en conditionnant les différents signaux.
La thèse sera divisée en six chapitres permettant de suivre la démarche poursuivie tout au long de notre travail. Dans le premier chapitre, nous passerons en revue les connaissances de base de l'énergie éolienne ainsi que les techniques et technologies existantes nécessaires à la réussite du travail. Au deuxième chapitre, nous étudierons les technologies d'éoliennes, plus particulièrement et en détail celle avec la GADA. L'étude détaillée de la représentation électrique sera le tremplin vers les chapitres 3 et 5 portant spécifiquement sur la commande de la GADA.
Le chapitre 3 porte sur la commande vectorielle directe et indirecte de la GADA, plus spécifiquement celle avec orientation du flux statorique. Cette technique est bien connue dans la littérature, plus particulièrement pour sa dépendance aux paramètres du système. Elle sera néanmoins un outil de familiarisation et de comparaison pour les techniques avancées du chapitre 5.
Dans le quatrième chapitre, on aborde la partie expérimentale. Cette partie est consacrée aux différents détails de l’implémentation expérimentale. Les deux aspects, matériel et programmation, sont détaillés dans l’objectif de réalisation d’un banc d’essai global, facilite l’implémentation de l’algorithme de contrôle et ainsi commander la GADA pour un tel régime de fonctionnement.
Dans le chapitre 5, nous aborderons la technique de commande par mode de glissement, mieux connue sous l'abréviation SMC qui signifie Sliding Mode Control (anglais). Les deux
- 8 -
types de commande par SMC directe et indirecte de puissance sont analysés et comparés par rapport à la commande vectorielle.
La contribution de la GADA dans l’amélioration de la qualité d’énergie est présentée dans la dernière partie de cette thèse. On détaille, dans cette partie, l’utilisation de la GADA comme filtre actif d’une part et comme un moyen de stockage inertiel d’autre part. Les résultats de simulations prouvent la validité de la démarche proposée.
Pour chaque chapitre, lorsque nécessaire, nous présenterons et analyserons les résultats de simulations et ceux expérimentaux obtenus en laboratoire (Laboratoire de génie électrique à l’université de Québec en Abitibi-Témiscamingue à Canada). en plus de discuter les problèmes rencontrés et solutions.
- 9 -
Chapitre 1 :
L’ÉNERGIE ÉOLIENNE
L’UTILISATION DE LA GÉNÉRATRICE ASYNCHRONE À DOUBLE
ALIMENTATION-GADA- POUR LA PRODUCTION DE L’ÉNERGIE
ÉOLIENNE.
1.1 Introduction.
Le développement récent des technologies de conversion en électricité de l’énergie éolienne trouve son justification dans les préoccupations environnementales, particulièrement le changement climatique dû en grande partie aux émissions de gaz carbonique, et dans le besoin de beaucoup de pays de réduire leur dépendance énergétique. Le rapport du GIEC (Groupe Intergouvernemental sur l’Évolution du Climat) confirme et amplifie les prévisions pessimistes des précédents rapports. Le réchauffement prévu en 2100 est compris entre 1.4 et 5.8 °C. La prévision la plus pessimiste de l’augmentation du niveau général de la mer est d’un peu moins d’un mètre en 2100. Ce niveau peut continuer à s’élever, par l’effet d’inertie, pendant plusieurs siècles même si le réchauffement de la planète était stoppé en 2100.
L’énergie éolienne est l’une des plus économiques options «énergies renouvelables » permettant de réduire les émissions de CO2 provenant de la production d’électricité. On pourrait se dire que, l’électricité éolienne se substituant de l’électricité nucléaire qui n’émet pas de CO2, l’effet sera nul de ce point de vue. Ce serait oublier que de nouvelles capacités de production d’électricité seront nécessaires d’ici quelques années pour environ quelques centaines de térawatt-heures par an et que les centrales à cycles combinés au gaz sont aujourd’hui les plus compétitives et qu’elles émettent du CO2. C’est donc à elles que se substitueront pour partie les centrales éoliennes.
- 10 -
1.2 Développement de l’énergie éolienne.
Le vent a été identifié comme une source d'énergie utile autour de cinq mille ans, quand il fut capturé par les voiles et utilisé pour propulser les bateaux en Égypte.
L’énergie du vent a été transformée en énergie mécanique afin de propulser des navires (3000 ans av. J.-C.), d’entrainer divers types de moulins à céréales et à huile ou encore des pompes à eau au Moyen Age [Mul.02]. Il existe beaucoup d’incertitudes par rapport aux origines des moulins et des turbines entrainées par le vent dans diverses civilisations (Égypte, Grèce, Empire Romain, etc.). Par contre, des preuves irréfutables confirment leur existence dès 644 ap. J.-C. [Hau.06]. Leurs premières traces ont été relevées en Perse où elles présentaient un axe de rotation vertical [Hau.06] [Hei.06] [Man.02]. Comme exemple sur les premiers turbines utilisés, celle de Figure.1.1. Elle montre un principe simple d’utilisation dans les bateaux à voile en Perse.
Ce n’est qu’après les développements de la technologie électrique, à la fin du 19ème siècle, que les éoliennes ont été considérées pour la production d’énergie électrique. Ces nouveaux systèmes sont alors appelés ”aérogénérateurs ”.
Aux États-Unis, la première centrale électrique éolienne a été inventée en 1888 par Charles F. Brush dans l'Ohio (États-Unis). Le système (Figure 1.2.a) avait un diamètre de rotor de 17m, et a généré 12 kW. La machine a travaillé pendant 20 ans et était même dotée d’un système de contrôle complet électrique, basé sur les solénoïdes standard qui a continué à exister pendant un siècle.
En 1891, Poul La Cour (au Danemark) conçoit plusieurs éoliennes expérimentales et mène des recherches en soufflerie. Il découvre que des turbines à rotation rapide composées d’un nombre moins grand de pales génèrent davantage d’électricité que des turbines plus lentes composées de nombreuses pales. Il met au point les premières éoliennes (Figure 1.2b) conçues à partir des principes modernes de l’aérodynamique. D'une puissance 25 kW grâce à des rotors à quatre pales, elles affichent une plus grande efficacité [Eol.].
L’énergie hydraulique, qui est aussi renouvelable, s’est beaucoup plus développée par la suite en raison de ses facilités de stockage spécifiques [Mul.02]. Elle est ainsi restée toujours dominante et les aérogénérateurs ne se sont développés que dans le cadre de recherches ou dans des niches d’application bien spécifiques en petites séries. On peut citer, par exemple, l’éolienne
- 11 -
bipale de 20 m de diamètre, commercialisé par la compagnie CEM (dans les années 1920) en France.
Aux États-Unis d’Amérique (EUA), en 1930, des centaines de milliers de petites turbines étaient utilisés pour l'alimentation des fermes, à l'époque leur utilisation étant de charger des batteries. Elles ont aussi servi pour l’alimentation des équipements de puissance dans des domaines de communication.
Figure.1.1 - Utilisation de turbine en Perse dans le bateau à voile
-a- -b-
Figure 1.2 - Premières Turbines utilisées pour produire de l’électricité [Jor. 06].Éolienne de Charles F. Brush (à Gauche) Éolienne de Poul La Cour (à droite)
- 12 -
La première turbine conçue pour produire une quantité importante d'énergie a été inventée en Russie en 1931. Le ``Balaclava`` pouvait générer 100 kW, et a été exploitée dans la mer Caspienne pour environ deux ans.
En 1941, un éolien bipale a été construit par l’American Smith-Putman (Figure 1.3) capable de générer 1.25MW, jusque quelque années précédentes, elle a était très ambitieux.
Après la deuxième guerre mondiale, le bas prix des dérivés du pétrole et du charbon ont fait en sorte que très peu d’intérêt s’est manifesté envers l’énergie éolienne [Hau.06]. Une petite relance du secteur éolien s’est produite à la fin des années 1960, quand la population occidentale a commencé à s’intéresser aux problèmes environnementaux reliés au d´enveloppement industriel [Man.02] (selon Manwell et al. les premiers mouvements écologistes sont nés grâce au livre intitulé ”Silent Spring” de Rachel Carson en 1962).
Il est possible d'affirmer que c’est la crise pétrolière de 1974 qui a fortement relancé les recherches dans le domaine et le développement d’aérogénérateurs. Au début des années 80, un concept simple et robuste de turbine a émergé et est devenu très populaire dans l'industrie éolienne. Le concept simple et robuste comprend une turbine éolienne trois pales, une boîte de vitesses, une machine à induction directement relié à la grille et un système de contrôle.
- 13 -
De nombreux projets de recherche financés par le gouvernement des E.U.A. ont permis la réalisation des premiers grands aérogénérateurs expérimentaux (de 100kW à 3.2 MW au début des années 1980).
En Europe, et en particulier au Danemark, dès 1974, une commission d’experts danois a déclaré qu’il serait possible de générer 10 % de l’énergie électrique du pays à l’aide d’aérogénérateurs. C’est dans les années 1980 qu’on a pu enfin constater un essor significatif de la commercialisation d’aérogénérateurs.
Pendant cette dernière décennie, les Danois et les Allemands avaient leurs propres systèmes avancés, encouragés par les possibilités d'exploiter les vents forts au nord de l'Europe. Les systèmes européennes préférés a été des éoliennes à axe horizontal (à trois ou deux pales). En effet, le Danemark est devenu le leader au niveau mondial, a créé un marché et a développé une énorme industrie d'exportation avec 90% de la fabrication vendus à l'étranger. En Allemagne, récemment, REpower a introduit une turbine de 5 MW avec 61,5 mètres de hauteur (Figure 1.4). Pour les prochaines années, l’énergie éolienne peut assurer 28,5% de la consommation totale de l’union wuropéenne jusqu’en 2030 selon l’estimation du Conseil Européen de l’Énergie Renouvelable (EREC. 2011).
- 14 -
1.2.1 Technologie d’éoliens.
Le concept d’aérogénérateur le plus ancien est celui de la turbine à axe de rotation vertical, présenté à la figure 1.5a. Il s’agit dans ce cas d’un rotor de type Darrieus, du nom de l’ingénieur français qui l’a proposé en 1925.
D’autres topologies à axe vertical ont été commercialisées comme celle de type Savonius, une structure ” à trainée ” de rendement médiocre et celle du ”rotor en H” ([Hau.06] [Hei.06] [Man.02]). L’avantage principal de la topologie à axe vertical réside dans la possibilité de placer au sol tout l’équipement mécanique et électrique qui constitue la chaîne de conversion électromécanique. De plus, aucun système d’orientation de l’azimut de la turbine n’est nécessaire. Les inconvénients principaux de cette structure concernent l’absence d’auto-démarrage dans le cas du type Darrieus et la difficulté à contrôler la puissance produite et la vitesse de rotation par un système mécanique de variation de l’angle de calage des pales. Ce type de turbine a été largement étudie dans les années1970 et 1980, particulièrement aux E.U.A. et au Canada [Man.02]. On cite ici le groupe d’énergies renouvelables EDEN qui réunissait des chercheurs du LEEPCI et du département de Génie Mécanique de l’Université Laval [Lav.85] [Leh.84] [Via.85].
L’autre concept de turbine est présenté à la figure 1.5bet il se caractérise par un axe de rotation horizontal. Il s’agit de la topologie la plus utilisée actuellement pour la production d’énergie électrique car elle présente différents avantages [Hau.06] [Hei.06] [Man.02]. Le premier consiste dans la possibilité de varier l’angle de calage des pales pour contrôler la puissance produite et la vitesse de la turbine. Ce mécanisme est aussi utilisé pour protéger la turbine contre les survitesses lors des tempêtes. Le second avantage concerne le rendement aérodynamique plus élevé par rapport aux topologies à axe vertical, ce qui implique une puissance captée par unité de surface plus élevée. Le succès des topologies à axe horizontal est également lié à la grande expérience acquise au cours du développement technologique des hélices [Hau.06]. C’est uniquement la topologie à axe horizontal qui est considérée dans cette thèse.
Le nombre de pales des turbines éoliennes à axe horizontal actuelles s’élève à deux ou trois. Ces caractéristiques sont imposées par certains compromis entre les performances et le coût des dispositifs. Sans entrer dans les détails, qui peuvent être consultés en [Hau.06] [Hei.06] [Man.02], on peut souligner que les turbines avec un nombre réduit de pales inferieur à trois
- 15 -
possèdent un rendement aérodynamique bien supérieur à celui des anciennes turbines multi-pales. Elles présentent aussi des vitesses de rotation nominales plus élevées. La tendance à choisir des rotors à trois pales a plusieurs explications. D’une part, les niveaux sonores sont plus acceptables par rapport à des turbines à une ou deux pales[Thr.98], et d’autre part les efforts mécaniques pulsants subis par la structure de l’aérogénérateur sont réduits à partir de trois pales [Hau.06].
Un nombre de pales supérieur à trois impliquerait d’une part une diminution du rendement aérodynamique et d’autre part une augmentation injustifiée du coût et de la masse de la turbine éolienne.
Depuis les débuts du développement des aérogénérateurs, les concepteurs ont essayé d’augmenter le rendement aérodynamique des turbines éoliennes. L’une des solutions adoptée consiste à faire varier la vitesse de rotation de la turbine en fonction de la vitesse du vent [Gra.93] [Thr.98] [Zin.97]. La capacité de varier la vitesse de rotation de la turbine éolienne est directement assujettie à la nécessité de disposer d’un générateur électrique à vitesse variable, puisque ces deux composantes sont mécaniquement couplées entre elles. Dans les applications de grande puissance reliées au réseau électrique, le système de génération doit fournir de l’énergie électrique à fréquence fixe. C’est grâce aux développements de
-a- -b-
- 16 -
l’électronique de puissance que de telles chaînes de conversion ont pu voir le jour. De plus, la possibilité de variation de la vitesse mécanique de l’entrainement favorise l’absorption des variations transitoires du couple moteur de la turbine provoquée par des rafales de vents, ce qui permet de diminuer considérablement la fatigue mécanique de certaines composantes de l’aérogénérateur. Les descriptions détaillées des premières grandes expériences d’aérogénérateurs à vitesse variable peuvent être consultées en [Car.01].
1.2.2 Situation actuelle de l’énergie éolienne (Jusqu’à 2009).
L’énergie éolienne est développée par de très nombreux pays et connaît une croissance très importante : + 30 % par an en moyenne depuis 10 ans (+ 31,8 % en 2009). Les figures 1.6 et 1.7 montrent l’évolution de la capacité éolienne pendant les dernières années et dans quelques pays respectivement.
En 2009, plus de 37 000 M W de nouvelles capacités éoliennes ont été installés dans le monde. L’installation totale d'énergie éolienne a représenté 17% de la capacité de production d'électricité renouvelable en 2010.Ceci est équivalent à 9,3GW [EWEA. 2011].
En Europe, l’éolien constitue la première filière de production électrique européenne en termes de nouvelle puissance installée en 2009 comme le montre la figure 1.8.
- 17 -
Figure 1.7 - Capacité éolienne pour quelques pays dans le monde
Figure 1.8 – Capacité des différentes sources d’énergie
L’installation des éoliennes «offshore» augmenté de 51% passant de 582MW en2009 à 883MW en 2010 avec308 nouvelles turbines installées. Cela porte la capacité totale offshore à 2964MW à partir de1136éoliennes offshore qui, ensemble, générerait11.5 TWh d'électricité éolienne dans une année normale. Le Royaume-Uni(RU) est le leader Européen (et mondial), avec une capacité totale installée éolienne offshore de1341MW.Le Royaume-Uni iest suivi par le Danemark avec854MW, 249 MW aux Pays-Bas, la Belgique : 195MW, 164 MW en Suède, en
- 18 -
Allemagne : 92 MW, 25 MW en Irlande, en Finlande 26 MW et2,3 MW avec la Norvège[EWEA.2011].
Entre1000 et 1500MW de nouvelle capacité éolienne offshore est entièrement raccordé au réseau en Europe en 2011.Dixparcs éoliens européens sont actuellement en construction avec un total de3000 MW–feront plus de doubler la capacité installée dans la grille de45éoliennes offshore déjà connectées. Selon EWEA (Europe an Wind Energy Association), un total de 19GW de capacité éolienne offshore est déjà pleinement consenti. Si construite, ellegénérerait66,6TWh d'électricité éolienne dans une année normale- assez pour alimenter14des plus grandes capitales en Europe avec l'électricité, y compris Paris, Londres et Berlin non inclus dans ce chiffre est la grande capacité supplémentaire d'énergie éolienne en mer prévue mais pas encore pleinement consentie au Royaume-Uni[EWEA2011].
La capacité de production de WTGS individuels est en augmentation avec des avec fabricants comme Vestas, General Electric (GE) et ENERCON, offrant des systèmes de capacité nominale de 3,0MW (V112-3.0 MWà aimants permanents), de 4,1 MW (4,1 à 113 entraînement direct) et de 7,5MW (MW E-126/7.5entraînement direct), respectivement [Vestas.2011][GE 2011][ENERCON 2011].
En 2010,29 nouveaux modèles de turbines offshore ont été annoncés par21 fabricants, alors que 44 modèles de cette nouvelle turbine éolienne ont été annoncés par33 fabricants au cours des deux dernières années [EWEA 2011].
L’éolien représente désormais 340 millions de MWh de production électrique par an, soit 2% de la consommation totale d’électricité dans le monde et a attiré un total d’investissements de 63 milliards de dollars. Les experts du GWEC (Conseil mondial de l’énergie éolienne) prévoient le maintien d’une croissance soutenue de l’éolien, conduisant à un parc installé de près de 409 000 MW en 2014. [http://fee.asso.fr].
1.2.3 Tendances actuelles dans le domaine des aérogénérateurs.
Il existe toute une panoplie de topologies de chaînes de conversion électromécanique applicable aux aérogénérateurs. Une vaste gamme de topologies à vitesse fixe et variable, utilisant la machine synchrone (MS) ou la machine asynchrone sont analysées et comparées en [Lih.08]. La référence [Poo.03] présente cette gamme de topologies modernes en fournissant pour chacune un estimé du coût initial et, s’il y a lieu, le détenteur de la propriété intellectuelle. Dans
- 19 -
cette thèse, nous allons nous concentrer sur les topologies les plus récentes qui permettent la variation de la vitesse de rotation de la turbine tout en fournissant l’énergie à un réseau électrique à fréquence fixe. Il s’agit des aérogénérateurs qui présentent à l’heure actuelle les puissances nominales les plus élevées. Les deux topologies les plus répandues dans le domaine, d’une puissance supérieure à 1 MW, sont illustrées à la figure 1.9.
La topologie présentée à la figure 1.9 (b) et qui utilise la machine synchrone est caractérisée en général par un entraînement mécanique direct entre la turbine éolienne et le générateur. Comme les vitesses de rotation des turbines éoliennes de forte puissance sont basses, le générateur synchrone présente un nombre de pôles élevé. Le convertisseur statique de fréquence gère l’échange de puissance active et réactive entre le réseau et la MS, tout en assurant une fréquence constante du côté du réseau et une fréquence variable du côté générateur. Le convertisseur statique permet un fonctionnement à vitesse de rotation variable de la turbine. Dans ce type d’entraînement classique, toute la puissance électrique produite doit transiter par le convertisseur statique, ce qui implique à priori une puissance de dimensionnement de celui-ci égale à la puissance nominale de l’installation. Pour que cette topologie soit intéressante du point de vue de la minimisation de la masse totale de la nacelle de l’aérogénérateur, il est préférable que l’excitation du rotor de la machine synchrone (MS) soit réalisée avec des aimants permanents. En contrepartie, ceci peut augmenter le coût initial du générateur. Plusieurs recherches sont actuellement en cours sur les topologies optimales de générateurs à aimant permanents qui permettent de réduire la masse et le coût [Dub.04].
La topologie présentée à la figure 1.9 (a) utilise une machine asynchrone à rotor bobiné dont les enroulements du stator sont directement reliés au réseau électrique. Les enroulements du rotor sont reliés au réseau électrique par l’intermédiaire d’un convertisseur statique de fréquence réversible en puissance de type ”quatre quadrants ”. Compte tenu de cet arrangement, cette topologie d’entraînement électrique est usuellement nommée” Machine Asynchrone à Double Alimentation ” (MADA). Comme les machines asynchrones présentent généralement un nombre de pôles limité, il est nécessaire afin de s’adapter aux fréquences industrielles des réseaux électriques (50Hz et 60Hz) d’entraîner leur rotor à des vitesses mécaniques élevées par rapport à celles des turbines éoliennes. Il est donc nécessaire d’utiliser un multiplicateur de vitesse mécanique à engrenages entre la turbine éolienne et la GADA. Les principes de fonctionnement de cette topologie sont présentés ultérieurement.
- 20 -
Figure 1.9 – Topologies d’aérogénérateurs utilisées actuellement dans la gamme des puissances supérieures ou égales au MW
L’ancêtre de la topologie GADA utilisée aujourd’hui est la version de la topologie connue sous le nom de son inventeur, Arthur Scherbius qui utilise des convertisseurs statiques d’électronique de puissance au lieu de convertisseurs rotatifs à base de machines électriques tournantes supplémentaires. Cette topologie pouvait utiliser entre le rotor de la machine asynchrone et le réseau électrique un convertisseur à commutation de courant direct dans le cas d’un cyclo-convertisseur ou indirect dans le cas d’un étage intermédiaire à courant continu. Elle a été utilisée pour les applications à forte puissance sur une plage de variation de vitesse limitée, comme dans les centrales hydrauliques réversibles à réserve pompée [Hod.04]. La référence [Smi.81] est une des premières publications scientifiques présentant l’utilisation de la topologie Scherbius à base de convertisseurs statiques pour des applications éoliennes. Les premiers travaux de recherche sur l’optimisation de cette topologie pour des applications éoliennes ont vu le jour au début des années 1990 [Cad.92]. Cette première version présentait des désavantages importants liés au type de convertisseur statique utilisé. En particulier le commutateur de courant à commutation assistée avec étage indirect à courant continu présente des problèmes de fonctionnement au voisinage de la vitesse de synchronisme qui fait partie de la plage d’utilisation de l’entraînement [Cad.92]. D’autre part le convertisseur direct de type cyclo-convertisseur présente certaines limitations au niveau de la plage de variation de fréquence autorisée, des harmoniques de courant injectés dans le réseau et du facteur de puissance. Au début des années
- 21 -
1990, la montée en tension des interrupteurs entièrement commandés de type IGBT a permis d’utiliser dans la topologie GADA une structure de convertisseur indirect utilisant deux onduleurs de tension reliés par un étage à courant continu de type capacitif et commandés par modulation de largeur d’impulsions (MLI). Les premières études par simulation ont été présentées en [Tan.92] et [Bog.93]. Alors que parmi les premiers travaux expérimentaux, on cite la première publication présentant des résultats expérimentaux sur une GADA de 7.5 kW se trouve en [Pen.96]. Les avantages importants de cette topologie de convertisseur statique ont mené rapidement à son emploi généralisé dans les aérogénérateurs utilisant la topologie GADA.
Une des grandes questions d’actualité sur les chaînes de conversion électromécanique des aérogénérateurs concerne la comparaison des performances de la topologie à entraînement direct utilisant la machine synchrone (MS) et de la topologie utilisant la génératrice asynchrone à double alimentation (GADA). Les deux solutions techniques différentes du point de vue de l’intérêt commercial à long terme ou à court terme. La topologie basée sur la machine synchrone présente une grande simplicité puisqu’elle permet de s’affranchir de l’emploi d’un multiplicateur de vitesse mais elle implique une machine à fort couple d’encombrement important et des convertisseurs statiques dimensionnés pour permettre le transit de la puissance nominale de l’aérogénérateur. La topologie basée sur la GADA doit utiliser un multiplicateur de vitesse mais elle implique une machine de plus faible couple, donc d’encombrement réduit, avec des convertisseurs statiques dimensionnés pour permettre le transit d’une fraction seulement de la puissance nominale de l’aérogénérateur. Une comparaison technico-économique entre ces solutions topologiques les plus modernes, basée sur une approche de modélisation simplifiée est présentée en [Pol.06]. De manière générale, par rapport à une topologie utilisant une machine synchrone à aimants permanents, la topologie utilisant la GADA présente un coût initial plus faible. En revanche elle présente un coût d’entretien plus élevé et un rendement légèrement moins élevé à cause des pertes supplémentaires engendrées par le multiplicateur de vitesse. Des études statistiques concernant d’une part la fiabilité des différents éléments constitutifs des aérogénérateurs utilisant la GADA et la machine synchrone et d’autre part leurs rendements respectifs sont disponibles en [Ech.07] et en [Gra.96].
Comme il a été mentionné, au cours des deux dernières décennies, la puissance nominale des aérogénérateurs a connu une croissance exceptionnelle, passant d’une cinquantaine de kW aux débuts des années 1980 jusqu’ à 6 MW (environ) aujourd’hui. La réalisation d’aérogénérateurs de puissance nominale de plus en plus élevée se justifie par l’abaissement du
- 22 -
coût par unité de masse et par unité d’énergie électrique produite. L’emploi d’aérogénérateurs plus grands permet également d’optimiser l’utilisation de l’espace du gisement éolien.
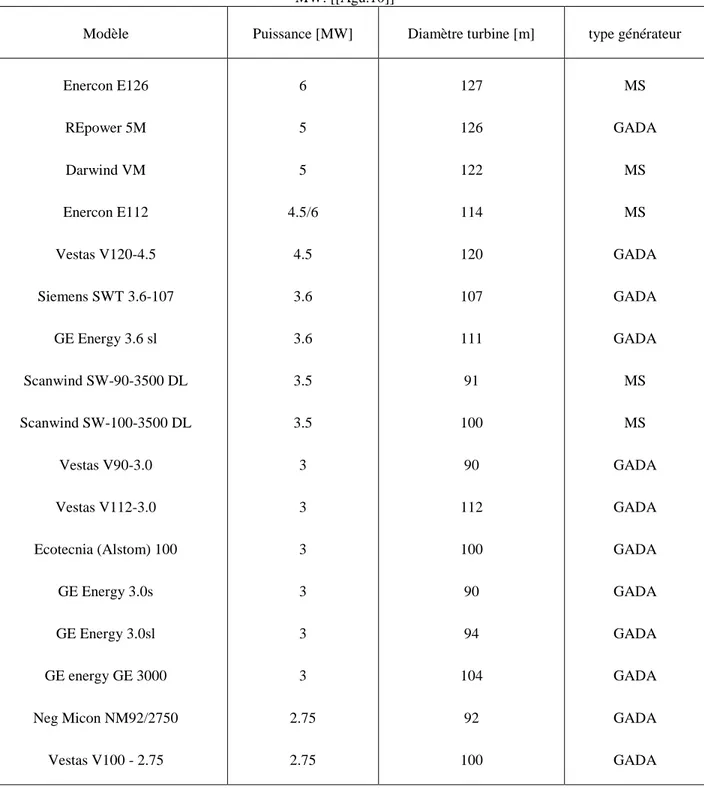
Tableau 1.1 – Modèles de turbines éoliennes offertes sur le marché actuel – Puissances nominales supérieures à 2.5 MW. [[Agu.10]]
Modèle Puissance [MW] Diamètre turbine [m] type générateur
Enercon E126 REpower 5M Darwind VM Enercon E112 Vestas V120-4.5 Siemens SWT 3.6-107 GE Energy 3.6 sl Scanwind SW-90-3500 DL Scanwind SW-100-3500 DL Vestas V90-3.0 Vestas V112-3.0 Ecotecnia (Alstom) 100 GE Energy 3.0s GE Energy 3.0sl GE energy GE 3000 Neg Micon NM92/2750 Vestas V100 - 2.75 6 5 5 4.5/6 4.5 3.6 3.6 3.5 3.5 3 3 3 3 3 3 2.75 2.75 127 126 122 114 120 107 111 91 100 90 112 100 90 94 104 92 100 MS GADA MS MS GADA GADA GADA MS MS GADA GADA GADA GADA GADA GADA GADA GADA
La littérature récente présente des avant-projets d’aérogénérateurs ayant des puissances nominales de 10 MW [Pol.07]. Les plus grandes et plus puissantes turbines éoliennes sur le marché actuel sont présentées au Tableau 1.1 (source [www.thewindpower.net]).
- 23 -
Parmi les constructeurs énoncés au Tableau 1.1, il faut remarquer l’absence de Multibrid- Areva et Winwind qui fournissent des aérogénérateurs d’une puissance nominale de 5 MW et 3 MW respectivement. Ils sont basés sur une nouvelle technologie, brevetée sous le nom de ”multibrid” qui consiste à utiliser une machine synchrone à aimants permanents couplée avec un multiplicateur de vitesse à un seul étage [Sie.98] [Hui.09]. La particularité réside dans le fait que le générateur est intégré dans le multiplicateur de vitesse, ce qui permet une optimisation importante de l’espace et de la masse embarquée dans la nacelle. Généralement, la technologie ”Multibrid” est destinée à un développement important compte tenu des problèmes complexes posés par l’augmentation de la masse des générateurs synchrones à entrainement direct pour la prochaine génération de grands aérogénérateurs.
1.2.4 Constitution des aérogénérateurs utilisant la GADA.
Les éoliennes permettent de convertir l’énergie du vent en énergie électrique. Cette conversion se fait en deux étapes:
-Au niveau de la turbine (rotor), qui extrait une partie de l’énergie cinétique du vent disponible pour la convertir en énergie mécanique.
-Au niveau de la génératrice, qui reçoit l’énergie mécanique et la convertit en énergie électrique, transmise ensuite au réseau électrique.
Du fait de la non-maîtrise de l’énergie primaire, qui de plus, est intermittente, il est difficile d’obtenir une conversion et une transmission de l’énergie régulières, puisqu’à priori la seule possibilité de stockage est inertielle, au prix d’une accélération de la turbine. Dans ces systèmes, la régularité de la transmission de l’énergie est donc tributaire d’un moyen de stockage en sus de l’inertie naturelle de la turbine.
Le fonctionnement général est illustré par la figure 1.10. L’ensemble de la chaîne de conversion fait appel à des domaines très divers et pose des problèmes aérodynamiques, mécaniques, électriques ou d’automatique. [Lav.05].
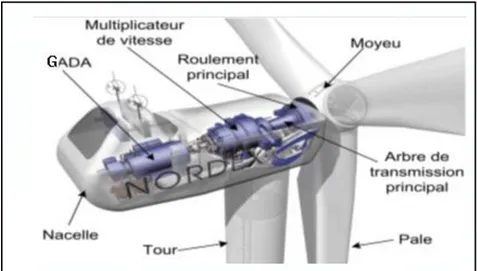
Les principaux éléments constitutifs d’un aérogénérateur utilisant la GADA, ainsi que leur disposition spatiale, sont présentés à la figure 1.11 qui correspond à une éolienne de 2.5MW de la firme Nordex (dessin à l’échelle).
- 24 -
La dernière génération d’aérogénérateurs utilise une tour de forme tubulaire en acier. La fabrication des pales a connu une grande évolution au cours des dernières années [Hau.06].
Figure 1.10 - Structure générale de contrôle pour une éolienne.
Figure 1.11 – Constitution d’un aérogénérateur utilisant la GADA. Image de presse officielle de la firme Nordex
- 25 -
Figure 1.12 – Vue interne d’un moyeu d’une turbine éolienne de 2.5MW [Agu.10]
Les aérogénérateurs plus récents utilisent différents matériaux comme l’aluminium, l’acier, la fibre de verre, la fibre de carbone et même plus récemment le bois [Hau.06][Man.02][Hei.06], qui peuvent même être associés dans des technologies de construction hybrides. La fonction du moyeu, constitué d’acier, ne se limite pas uniquement à maintenir les pales et à transmettre le couple mécanique vers l’arbre principal; il contient aussi un dispositif embarqué de variation de l’angle de calage des pales illustré par la figure 1.12 et qui comporte des convertisseurs d’électronique de puissance, des moteurs et des réducteurs.
Un système similaire est utilisé afin de contrôler la position d’azimut de la nacelle de manière à placer le plan de rotation des pales perpendiculairement à la direction du vent.
La nacelle est constituée d’une structure rigide en acier sur laquelle sont fixés le générateur, le multiplicateur de vitesse et le roulement principal ainsi qu’une couverture de protection généralement constituée de fibre de verre renforcée. Un frein à disque, placé sur l’arbre de transmission à haute vitesse est utilisé lors des arrêts d’urgence et pour maintenir à l’arrêt la turbine éolienne lors d’interventions de maintenance, en cas de tempête ou encore en cas de vents trop faibles.
Un accouplement flexible est placé en général sur l’arbre de transmission à haute vitesse pour permettre de tolérer des erreurs d’alignement entre la GADA et le multiplicateur de vitesse [Hau.06] [Man.02]. Ce composant permet de supporter des surcharges mécaniques importantes qui peuvent soumettre la structure entière de la nacelle à des contraintes de torsion. Il permet
- 26 -
aussi un découplage rapide entre le générateur et le multiplicateur de vitesse en cas d’intervention de maintenance.
La transmission mécanique peut être sujette à des variations de couple importantes, qui peuvent être produites par des rafales de vents, des manœuvres d’arrêt d’urgence de la turbine ou encore des défauts mécaniques ou électriques [Hei.06]. Les problèmes liés aux régimes transitoires de charge mécanique sur la transmission ont été largement atténués par le développement des générateurs à vitesse variable qui assurent un couplage souple entre la vitesse de la turbine et la pulsation électrique fixe du réseau [Car.01]. Cependant, il existe toujours des régimes de fonctionnement qui peuvent affecter lourdement la transmission mécanique: lors d’un régime de défaut électrique (un court-circuit côté réseau par exemple), la GADA peut produire des couples oscillatoires d’amplitude pouvant atteindre 5 à 6 fois le couple nominal, comme cela est décrit en [Hau.06]. D’un point de vue économique, il est impensable de dimensionner toute la transmission mécanique incluant le multiplicateur de vitesse pour ces valeurs de couple très élevées. Habituellement, un système de protection contre les surcharges de couple mécanique est placé sur l’arbre de transmission à haute vitesse ainsi que des composantes mécaniques à rupture comme le ”braking ring coupling” [Hau.06]. Un couplage par embrayage hydraulique placé sur l’arbre de transmission à haute vitesse a déjà été utilisé par certains constructeurs en vue de protéger la transmission mécanique, mais cette solution a été abandonnée en raison des pertes mécaniques importantes en régime de fonctionnement normal [Hau.06].
1.3 Intégration de la GADA dans un système éolien.
La GADA est une génératrice directement couplée au réseau, alors que l’enroulement rotorique triphasé avec bagues collectrices y est connecté par l’intermédiaire d’une interface d’électronique de puissance et, généralement, d’un transformateur.
Pour la grande majorité des éoliennes proposées sur le marché, cette interface est constituée de deux onduleurs de tension a interrupteurs commandables à la fermeture et à l’ouverture (en général ce sont des IGBT) [Pen.96], [Bho.99], [Rod.02], fonctionnant indifféremment en mode redresseur ou onduleur La structure générale spécifique de contrôle d’une structure MASDA est présentée sur la figure 1.13. [Lav.05].
- 27 -
Figure 1.13 - Système de commande d’un générateur asynchrone à double alimentation
1.4 La GADA en vitesse variable
Les éoliennes (WTS) peuvent soit fonctionner à vitesse fixe ou vitesse variable. Pour une éolienne à vitesse fixe, le générateur est relié directement au réseau électrique. Pour une éolienne à vitesse variable, le générateur est contrôlé par un équipement électronique de puissance. Il existe plusieurs raisons d’utiliser le fonctionnement à vitesse variable; à savoir, les possibilités de réduire les contraintes de la structure mécanique, la réduction du bruit acoustique et la possibilité de contrôler la puissance active et réactive [Bur.01].
La plupart des grands fabricants d'éoliennes en train de développer de nouvelles turbines éoliennes plus grandes de la gamme 3-to-5-MW [Act.02]. Ces grandes éoliennes sont toutes basées sur un fonctionnement à vitesse variable avec une génératrice entraînée directement synchrone (sans boîte de vitesses) ou un générateur asynchrone à double-alimentation (GADA) [Pet.05].
- 28 -
Selon [Car.96], la production d'énergie peut être augmentée de 2-6% pour une éolienne à vitesse variable par rapport à une éolienne à vitesse fixe, tandis que dans [Zin.97] il est indiqué que l'augmentation de l'énergie peut être de 39%. La littérature montre que le gain de production d'énergie de l'éolienne à vitesse variable par rapport à l'éolienne à vitesse fixe le plus simple peut varier entre 3-28% selon les conditions du site et les paramètres de conception.
Selon [Dat.02], le captage de l'énergie peut être considérablement augmenté en utilisant une GADA. Ils affirment que la capture de l'énergie a augmenté d'un GADA de plus de 20% par rapport à un système à vitesse variable en utilisant une machine à induction à cage-bar et de plus de 60% par rapport à un système à vitesse fixe.
1.5 Performances et commande de la GADA.
Le principal avantage de la génératrice asynchrone à double alimentation, et ce qui la rendu populaire, est que l'équipement électronique de puissance a seulement pour traiter une fraction (20-30%) de la puissance totale du système [Han.01]. Cela signifie que les pertes dans les équipements électroniques de puissance peuvent être réduites par rapport à l'équipement électronique de puissance qui doit faire face à la puissance totale d’un système avec un générateur synchrone à entraînement direct, en dehors de la réduction des coûts.
La GADA est parfaitement contrôlable si le flux des puissances est bien contrôlé dans les enroulements du rotor à l'aide d'électronique de puissance.
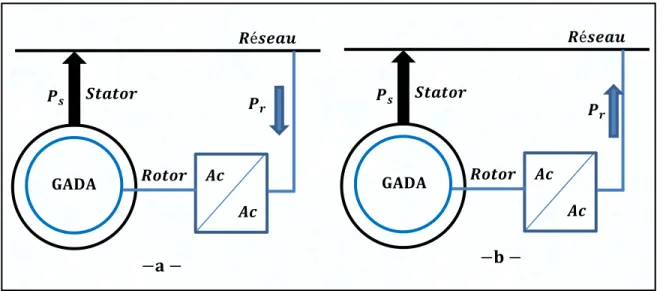
Puisqu'elle peut fonctionner en mode moteur et générateur aux vitesses hypo- et hyper-synchrone, nous avons à distinguer quatre modes opérationnels caractéristiques de la machine où le stator est connecté directement au réseau. Lorsque la GADA fonctionne en moteur hypo-synchrone, la puissance doit être extraite du rotor. Cette puissance est appelée puissance de glissement et pourra être récupérée par 1'entraînement pour être réinjectée au réseau. Si la vitesse augmente au-dessus de la vitesse synchrone, elle fonctionnera en mode hyper-synchrone et la puissance de glissement sera absorbée par le rotor. Lorsqu'elle fonctionne comme générateur, la puissance de glissement sera simplement de signe opposé au fonctionnement moteur pour les modes hypo et hyper-synchrone. Puisque le stator est directement connecté au réseau, la vitesse synchrone de la machine est fixée par la fréquence des tensions au stator. Cependant, à l'opposé de la machine asynchrone à cage, il existe théoriquement une grande plage de points d’opérations couple-vitesse ce qui permet le fonctionnement à couple-vitesse variable dans les quatre quadrants.
- 29 -
Pour la GADA, comme on le verra dans le chapitre 3, la commande des puissances active et réactive se fait directement ou bien indirectement via une régulation des courants.
Le premier pas vers la commande était apparu grâce aux travaux de R. H. Park dans les années 1920 alors qu’il y introduit un changement des variables (tensions, courants ou flux) du stator d'une machine synchrone vers un système d'axe en rotation synchrone avec le rotor. Ce changement de variable a eu pour conséquence d'é1iminer les inductances variables dans le temps des équations dynamiques de la machine et est bien connu de tous aujourd'hui sous le nom de système référentiel rotorique. Nous pouvons affirmer que cette révolution est à l’origine de la commande vectorielle des machines électriques. Elle se caractérise par un découplage du couple et du flux ce qui permet aujourd'hui, grâce à l'avancement de l'électronique de puissance, de remplacer les entraînements à courant continu par des entraînements de haute performance à courant alternatif. II existe une grande quantité de variantes à la commande vectorielle, particulièrement quant au choix du référentiel utilisé. La commande vectorielle s'appuie fortement sur une connaissance approfondie du modèle de la machine électrique ainsi que sur des hypothèses théoriques telles que :
- Les enroulements de la machine sont équilibrés. - La distribution de flux est sinusoïdale.
- II n’y a pas de saturation magnétique. - Les pertes fers sont nulles.
Le principal objectif est de contrôler indépendamment les puissances active et réactive de la GADA, la tension, ou la fréquence. S’intéressant à l’amélioration des performances vis-à-vis robustesse, stabilité de système globale (système éolien), et qualité d’énergie échangée avec le réseau.
La présence des convertisseurs au rotor rendent le contrôle de la GADA plus compliqué que le contrôle d'une machine d'induction, en revanche, ils offrent des possibilités de contrôle extrêmement utiles au pilotage de l’ensemble : contrôle de la qualité des courants et des puissances active et réactive injectés au réseau, meilleur suivi de trajectoire des courants, maîtrise fine et rapide des points de fonctionnement. La commande de l’onduleur côté rotor permet le contrôle de la puissance convertie. Il s’agit en fait de contrôler le couple du générateur afin d’obtenir la vitesse de rotation souhaitée. Les dynamiques des grandeurs électriques et mécaniques étant très différentes, il est avantageux de contrôler la machine par une structure
- 30 -
générale en cascade avec des boucles imbriquées [Pet.03]. Le couple et le flux sont contrôlés par l’intermédiaire de boucles de courant internes très rapides. Ces commandes sont réalisées dans un référentiel tournant [Roy.03], [Atk.99], [Dit.01], [Hof.00], [Pen.97], [Ram.02], [Ehr.01]. Commande vectorielle à flux statorique orienté [Atk.99], [Dit.01], [Gho.01], [Hof.00], [Hop.97], [Leo.01], [Pen.96], [Pen.97], [Wan.93], [Xu.95].
Si la résistance du stator peut être considérée comme faible, l'orientation du flux statorique donne l'orientation à la tension statorique [Dat.99], [Mor.98]. [Per.99].
La consigne de couple provient généralement d’une boucle d’asservissement de vitesse externe plus lente. La consigne de vitesse peut être calculée à partir de la vitesse du vent pour obtenir un fonctionnement optimal aux faibles et moyennes vitesses du vent et pour obtenir un fonctionnement à vitesse de rotation constante (en général) aux fortes vitesses du vent lorsque la puissance captée est limitée.
Une commande nécessite, inévitablement, une bonne connaissance de la variable à contrôler, en particulier, le flux de la machine. Ce dernier devra être estimé à partir de quantités mesurées telles les courants, tensions, vitesse et position du rotor de la machine ou directement dérivé à l'aide de capteurs à effet de Hall placés dans l'entrefer de la machine. En utilisant la transformation de Park, les courants, tensions, flux ou autres variables d'intérêt peuvent être représentés dans un référentiel tournant ou stationnaire commun, ce qui permet de calculer des grandeurs telles que le flux à partir de variables oscillant a des fréquences différentes comme les courants du rotor et stator. De plus, en suivant 1'orientation du référentiel commun, les variables sinusoïdales peuvent être transformées en variables continues en régime permanent permettant l'application de techniques de régulation linéaires simples. Une fois les signaux de compensation générés, les variables seront transformées à nouveau vers le référentiel d'origine où interviendra la modulation des interrupteurs de puissance. II est à noter que le développement de la commande vectorielle appliquée à la GADA remonte à 1981 où des convertisseurs à thyristors en source de courant étaient utilisés afin de contrôler les courants du rotor de la machine [Yam.91].
Considérons la topologie celle où les convertisseurs de puissance se trouvent dans le côté rotor de la GADA, avec cette topologie, l’intégration de la GADA au réseau nécessite un peu de particularités. Cet aspect a été étudié par de nombreux auteurs, la plupart d'entre eux portés sur les aspects dynamiques, économiques, qualité d’énergie et stratégies de contrôle.
- 31 -
Chaque aspect est traité de différentes façons, et tellement les travaux développés sont nombreux dans la littérature (depuis les années 1980 et notamment pendant cette dernière décennie), des états d’art sur le fonctionnement, l’utilisation, la modélisation et la commande de la GADA se trouvent dans les références [Lav.05].[Kho.06].[Boy.06]. En revanche. Les travaux effectués sur la GADA peuvent être partagé comme suit :
Étude des performances dans les différentes zones de fonctionnement de la GADA, leur modélisation et stabilité.
Qualité d’énergie échangé avec le réseau, en tenant compte des différents défauts intervenant dans le réseau électrique (court-circuit, creux de tension, phases déséquilibrées..).
Dimensionnement des convertisseurs de puissance.
Stratégie de contrôle (orientation de flux, commande directe des puissances, lois de commande avancées...).
Estimation des différents paramètres.
Intégration de la GADA dans le réseau électrique.
Dans notre étude, on se limite sur quelques travaux récents qui sont liés à l’aspect contrôle du système éolien avec GADA. On s’intéresse aux quelques travaux sur quelques commande et applications liées au GADA. Parmi les travaux on cite :
D. Schulz [Sch.02] étudie la variation du facteur de puissance, pour les deux génératrices GADA et machine synchrone, en fonction de la variation de la vitesse du vent. Également, il étudie la variation du taux de distorsion harmonique en fonction de la puissance active de la génératrice. Il a conclu qu’il n’y a qu’une légère différence au niveau des harmoniques où la génératrice asynchrone présente un spectre de fréquence contenant un nombre plus important d’harmoniques que la génératrice synchrone à cause du convertisseur du rotor.
J. Bendl [Ben.02] présente une approche qui peut minimiser l’effet des perturbations réseau sur le facteur de puissance de la GADA. Il emploie un contrôle vectoriel utilisant quatre régulateurs de courant, ce qui assure un contrôle indépendant des séquences négatives et positives des courants de la machine.
Le même principe de contrôle vectoriel est utilisé par B. Hopfensperger [Hop.00]pour prouver les performances du fonctionnement d’une GADA sans capteur de vitesse. Il présente