T
T
H
H
È
È
S
S
E
E
En vue de l'obtention du
D
D
O
O
C
C
T
T
O
O
R
R
A
A
T
T
D
D
E
E
L
L
’
’
U
U
N
N
I
I
V
V
E
E
R
R
S
S
I
I
T
T
É
É
D
D
E
E
T
T
O
O
U
U
L
L
O
O
U
U
S
S
E
E
Délivré par l'Université Toulouse III - Paul SabatierSpécialité : Informatique
JURY
Marc NEVEU : Professeur à l'Université de Bourgogne, Rapporteur Jean SEQUEIRA : Professeur à l'Université de la Méditerranée, Rapporteur Jean Pierre JESSEL : Professeur à l’Université Paul Sabatier, Directeur de thèse
Solofo RAKOTONDRAOMPIANA : Professeur à l’Université d' Antananarivo, Codirecteur de thèse Adolphe RATIARISON : Professeur à l’Université d' Antananarivo, Examinateur
Ecole doctorale : Mathématiques, Informatique et Télécommunications de Toulouse Unité de recherche : Institut de Recherche en Informatique de Toulouse Directeurs de Thèse : Jean Pierre JESSEL et Solofo RAKOTONDRAOMPIANA
Rapporteurs : Marc NEVEU et Jean SEQUEIRA
Présentée et soutenue par Fenohery Tiana ANDRIAMANAMPISOA Le 18 Novembre 2008
Titre : Recalage multimodal 3D utilisant le modèle élastique, la méthode des éléments finis et l'information mutuelle dans un environnement parallèle.
Remerciements
Je voudrais exprimer toute ma reconnaissance à toutes les personnes que j’ai côtoyées au cours de ces trois dernières années tant à Madagascar qu’en France. Cette thèse n’aurait pu être réalisée sans leur soutien moral.
Je tiens à remercier particulièrement mes directeurs de thèse Jean Pierre JESSEL et Solofo RAKOTONDRAOMPIANA pour leurs conseils inestimables qu’ils m’ont donnés tout au long de cette thèse.
Je remercie également les professeurs Marc NEVEU et Jean SEQUEIRA pour l’intérêt qu’ils ont porté sur cette thèse.
Je tiens à remercier l’Agence Universitaire de la Francophonie (AUF) qui m’a attribué une bourse d’étude durant la réalisation de cette thèse.
Je ne serais jamais assez éloquent pour exprimer ma gratitude et ma reconnaissance au Professeur René CAUBET, qui n’a pas ménagé ses efforts pour assurer toutes les démarches nécessaires dans la réalisation de la formation doctorale à l’Université de Fianarantsoa Madagascar.
Je souhaite exprimer ma profonde gratitude à ma femme et à ma famille qui ont toujours su m’encourager et me soutenir dans mes démarches.
Enfin, je veux aussi remercier toute l'équipe de l’Institut de Recherche en Informatique de Toulouse notamment celle de VORTEX (Visual Objects: from Reality To Expression) pour son accueil et sa sympathie. Je n’oublie pas tous mes compatriotes thésards Malagasy que j’ai côtoyés durant ces trois dernières années.
Résumé
En imagerie médicale, les analyses, les interprétations et les diagnostics basés sur des comparaisons des images sont des tâches courantes. Actuellement, il est aussi de plus en plus courant d’effectuer des superpositions et éventuellement des fusions des images pour fiabiliser les examens. Pour ce faire, il est indispensable que les images soient mises en correspondance. C’est le processus de recalage. Cette étude traite à la fois le recalage rigide et le recalage non rigide appelé aussi élastique. En effet, le processus de recalage est la combinaison de recalage rigide global suivi de recalage non rigide. De plus, on peut faire la mise en correspondance d’images de différentes modalités. Ainsi, l’information mutuelle avec la variante de Mattes est très adaptée pour effectuer le recalage multimodal.
Parmi les transformations géométriques existantes dans le recalage rigide, on a choisi la rotation centrée, la translation et le changement d’échelle comme transformation rigide. L’application de la transformation se fait sur la globalité des images. En outre, certaines images sont « symétrisables » par rapport à un plan. Avec ces images, le processus de recalage rigide global peut s’étendre à la recherche du plan de symétrie en adaptant certains paramètres de transformation.
En ce qui concerne le recalage non rigide, on s’est basé sur le modèle des matériaux élastiques linéaires isotropes. Cette modélisation permet de donner les caractéristiques de régularisation de l’image. Par la suite, pour résoudre le problème, on a cherché la solution approchée avec l’utilisation de la méthode des éléments finis. Pour la discrétisation, on a opté pour le maillage uniforme pour sa simplicité et le temps de construction est nettement plus rapide par rapport au maillage adaptatif. L’utilisation de l’information mutuelle selon Mattes, comme critère de similarité, procure la possibilité de faire un recalage avec des images de basses résolutions, comme les tomographies par émission de positons (PET) et les tomographies par émission monophotonique (TEMP). Cette thèse présente le principe de cette approche et l’algorithme correspondant. On a fait des expérimentations avec des images médicales en 3D.
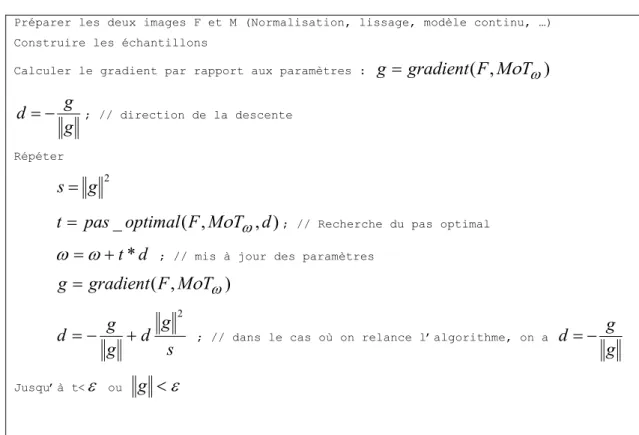
Le fait que la fonction objective générée par l’information mutuelle selon Mattes est à la fois convergente et suffisamment lisse, tant en recalage rigide qu’en recalage élastique, on a adopté la descente de gradient conjugué comme la méthode d’optimisation.
rigide et du recalage élastique dans l’environnement parallèle. L’objectif est de pouvoir déployer le processus de recalage sur un vaste panel d’architecture comme le supercalculateur, les machines en cluster et même une grille de calcul. Ainsi, la parallélisation est fondée sur l’architecture Single Program Multiple Data à mémoire distribuée (SPMD-DM).
Un des grands avantages de cette modélisation est la conservation de l’existence de toutes les parties de l’image. En effet, on a pu remarquer que même pour une petite partie de l’image, comme une petite tumeur, elle ne se perd pas après le recalage. On a pu aussi remarquer que cette méthode de recalage donne de bons résultats tant avec des images de basses résolutions, comme les PET, qu’avec des images de bonnes résolutions, comme les MRI.
Abstract
Current tasks in medical imagery consist of analysis, interpretations and diagnoses based on comparisons of images. Superposition and fusion are convenient too. The main problem is to set in correspondence the images, and this process is called registration. This survey treats rigid and non rigid registration. Indeed, the process consists in the combination of global rigid registration and of non-rigid registration. Besides, it is possible to do registration with images from different modalities. So, Mattes mutual information is interesting for multimodal registration.
In global rigid registration, we have chosen centered rotation, translation and scale transform as geometric transformation. Some images possess a plan of symmetry. So, with these images, the global rigid registration can spread in search of the plan of symmetry while adapting some parameters of transformation.
For the non-rigid registration, we propose a combination of the elastic material model, the finite elements method and the use of the mutual information as a very attractive way to make non-rigid registration. The modelling is based on isotropic elastic linear material model. This modelling allows getting image regularization characteristics. In this survey, the mesh chosen is uniform grid. This choice is based on its simplicity and because the time of construction is faster than for adaptive grid. Using Mattes mutual information, as criteria of similarity, procure the possibility to do registration with low resolutions images like Positron Emission Tomography (PET) and Single Photon Emission Computed Tomography (SPECT). This thesis presents the principle of this approach and the algorithm. We have made an implementation basing of this approach with medical images in 3D.
The objective function generated by the Mattes mutual information is at a time convergent and sufficiently smooth, so, we opted the gradient conjugated as the optimization method.
However one can note that registration requires a too much important calculation time and high occupancy spaces especially with 3D images. Thus, the parallelization is expected. So, this survey deals the transformation of the registration algorithm in a parallel environment. The aim is to be able to open out the registration process on a large kind of architecture like supercomputer, large scale network or clusters. We have worked with Single Program Multiple Data model on
One of the advantages for this modelling is the conservation of the all parts existences in the images. Indeed, we can notice that even a small part of image, such as a little tumour, doesn't get lost after the registration. We could notice that this registration method gives good results with low-resolutions images, such as PET images, as well as with of high-resolutions images, such as MRI images.
TABLE DES MATIERES
I. Chapitre 1 Introduction générale...11
I.1 Imagerie médicale...16
I.1.1 Imagerie anatomique...16
I.1.2 Imagerie fonctionnelle ...19
I.2 Recalage d’images...20
I.3 Contributions...22
II. Chapitre 2 Le recalage d’images...25
II.1 Introduction...25
II.2 Objectifs ...25
II.3 Approches géométriques...26
II.4 Approches iconiques ...28
II.5 Recalage rigide global...28
II.5.1 Transformation...29
II.6 Recalage non-rigide local...31
II.6.1 Modélisations...32
II.6.2 Méthodes de résolution...33
II.7 Conclusion ...35
III. Chapitre 3 Eléments de calcul ...37
III.1 Introduction...37
III.2 Mesures de similarité...37
III.2.1 Moyenne des carrés...37
III.2.2 Corrélation normalisée ...38
III.2.3 Rapport de corrélation ...38
III.2.4 Information mutuelle...38
III.3 Les interpolations...40
III.4 Optimisations...42
III.5 Conclusion ...45
IV. Chapitre 4 Recalage rigide global ...49
IV.1 Introduction...49
IV.2 Transformation 3D...50
IV.3 Information mutuelle...51
IV.4 Algorithme ...52
8
IV.6 Expérimentations en recalage rigide et résultats...55
IV.7 Recherche du plan de symétrie...59
IV.8 Conclusion ...61
V. Chapitre 5 Modèle élastique et méthode des éléments finis ...63
V.1 Introduction...63
V.2 Modèle élastique...63
V.2.1 Déformation ...64
V.2.2 Contraintes...65
V.2.3 Relation entre déformation et contrainte ...66
V.3 Méthode des éléments finis ...67
V.3.1 Déplacement d’un point à l’intérieur d’un élément...68
V.3.2 Relation entre déformations et déplacements dans un élément...70
V.3.3 Matrice de rigidité d’un élément [K ...71 e] V.3.4 Construction de la matrice de rigidité globale K ...72
V.4 Conclusion ...72
VI. Chapitre 6 Recalage élastique ...73
VI.1 Introduction...73
VI.2 Résolution du problème de recalage non-rigide ...73
VI.2.1 Force de similarité F ...74
VI.2.2 Résolution du système linéaire KU =F ...74
VI.3 Algorithme de recalage élastique...76
VI.4 Complexité de l’algorithme de recalage élastique ...77
VI.5 Expérimentations et résultats ...79
VI.6 Approche hiérarchique...82
VI.7 Expérimentations et résultats avec l’approche hiérarchique...84
VI.8 Conclusion ...88
VII. Chapitre 7 Environnement parallèle...91
VII.1 Introduction ...91 VII.2 Architecture-modèle...91 VII.2.1 SIMD-SM...92 VII.2.2 SIMD-DM...93 VII.2.3 MIMD-SM ...93 VII.2.4 MIMD-DM...94
VII.4 Mesure des performances : accélération et efficacité ...95
VII.5 Les communications ...97
VII.5.1 Communication point à point...97
VII.5.2 Communication collective ...98
VII.5.3 Bibliothèques de communication ...99
VII.6 Conclusion...99
VIII. Chapitre 8 Le processus de recalage dans l’environnement parallèle ...101
VIII.1 Introduction ...101
VIII.2 Les parties parallèlisables des algorithmes de recalage...101
VIII.2.1 Recalage rigide...101
VIII.2.2 Recalage non-rigide ...102
VIII.3 Algorithmes mis en parallèle...103
VIII.3.1 Calcul de l’information mutuelle ...103
VIII.3.2 Calcul de gradient de l’information mutuelle par rapports aux paramètres...106
VIII.3.3 Calcul de la matrice inverse de K ...109
VIII.3.4 Calcul de la multiplication matrice-vecteur v=K−1×d ...110
VIII.4 Conclusion...111
IX. Chapitre 9 Expérimentations...113
IX.1 Introduction...113
IX.2 Les bibliothèques : MPI et les calculs en algèbre linéaire...113
IX.2.1 Message Passing Interface (MPI)...113
IX.2.2 Les bibliothèques pour les calculs en algèbre linéaire...114
IX.3 Expérimentation sur SGI ALTIX ...115
IX.3.1 Recalage rigide ...116
IX.3.2 Recalage non-rigide...117
IX.4 Expérimentation sur GRID’5000 ...121
IX.4.1 Recalage rigide ...122
IX.4.2 Recalage non-rigide...123
IX.5 Conclusion ...124
X. Conclusion générale et perspectives...125
X.1 Bilan ...125
X.2 Perspectives...127
Liste des figures
Figure I.1. Scanner X : Siemens SOMATOM SENSATION ...17
Figure I.2. A gauche, équipement IRM. Toshiba OPART . A droite, une coupe cérébrale dans le plan axial ...18
Figure I.3. A gauche, équipement Ultrason : Toshiba ARTIDA. A droite, une image cardiologique à ultrason ...18
Figure I.4. A gauche, appareil pour la TEP : Siemens BIOGRAPH TRUEPOINT. A droite, une image cérébrale en TEP dans les plans transversal, sagittal et coronal...19
Figure I.5. Appareil pour la TEMP : Siemens SYMBIA TRUEPOINT...20
Figure I.6. Coupes dans le plan axial(transversal) de modalités différentes...21
Figure II.1. Processus de recalage. I et J sont respectivement l’image cible et l’image source ...26
Figure II.2. Image simplifiée d’une coupe de cerveau. (a) : l’image de référence avec des points d’amers et (b) : l’image flottante avec les points d’amers correspondants ...27
Figure II.3. Transformation rigide et transformation affine...30
Figure II.4. Coupe axial de poumons. A gauche, en inspiration. A droite, en expiration ...31
Figure IV.1. Transformation géométrique ...49
Figure IV.2. Images IRM de deux patients différents de taille 128x128x128. En haut, l’image de référence, et en bas, l’image flottante. A gauche : les coupes transversales ; au milieu : les coupes sagittales, à droite : les coupes coronales. ...51
Figure IV.3. Algorithme de recalage rigide...54
Figure IV.4. Résultat du recalage rigide avec les images de la Figure 4.2. En haut l’image de flottante avant le recalage rigide, au milieu l’image flottante après le recalage rigide et en bas l’image de référence. A gauche : les coupes transversales ; au milieu : les coupes sagittales, à droite : les coupes coronales...56
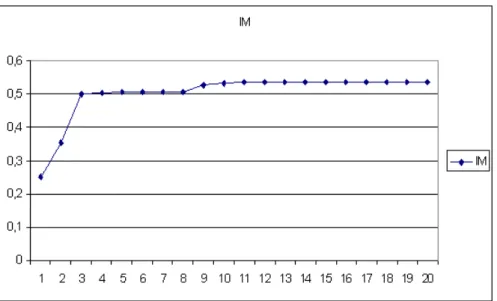
Figure IV.5. Les valeurs de l’information mutuelle (IM) durant le recalage rigide de la figure IV.4. ...57
Figure IV.6. Conversion du problème de recherche de symétrie en problème de recalage rigide...59
Figure IV.7. L’image dans l’axe de symétrie...60
Figure V.1. Objet déformable soumis à une charge externe ...64
Figure V.2.Flux d’effort en un point X selon la normale n ...65
Figure V.3. Représentation des contraintes...66
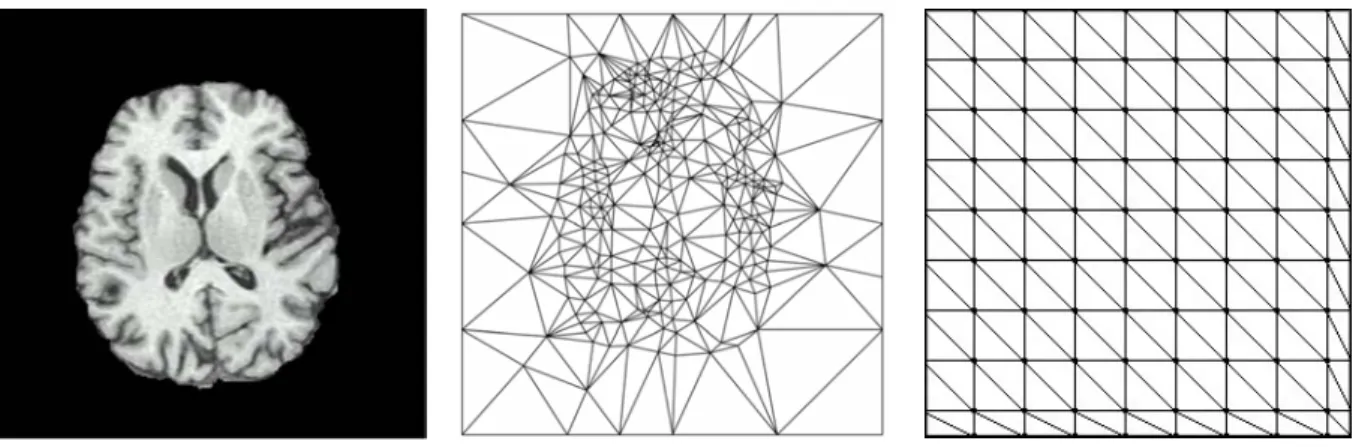
Figure V.4. Maillage d’une image en 2D. A gauche, l’image source. Au centre, maillage adaptif. A droite, maillage uniforme...67
Figure V.5. Une image plongée dans un grille uniforme...68
Figure V.6. Un élément (tétraèdre) et la représentation du calcul d’une coordonnée barycentrique...69
Figure VI.1. Gradient conjugué (Résolution du système linéaire Ku-f=0)...75
12
Figure VI.3. Résultat du recalage élastique. En haut l’image de référence, au milieu l’image flottante avant le recalage élastique et en bas l’image flottante après le recalage élastique. A gauche : les coupes
transversales ; au milieu : les coupes sagittales, à droite : les coupes coronales...80
Figure VI.4. Image recalée avec le maillage déformé...80
Figure VI.5. Les valeurs de information mutuelle (IM) durant le recalage non-rigide de la figure VI.4...81
Figure VI.6. Hiérarchie de maillage en 3 niveaux. A gauche : le niveau 2, au centre : le niveau 1 et à droite : le niveau 0...83
Figure VI.7. Algorithme de recalage non-rigide ...84
Figure VI.8. Résultat du recalage élastique des images de référence et flottante de la Figure 6.4. au niveau 2. ...84
Figure VI.9. Résultat du recalage élastique multi-échelle des images de référence et flottante de la Figure VI.4. au niveau 1. ...85
Figure VI.10. Résultat final du recalage élastique multi-échelle des images de référence et flottante de la FigureVI.3. ...85
Figure VI.11. Les valeurs d‘information mutuelle (IM) durant le recalage élastique multi-échelle des images de référence et flottante de la Figure VI.3. ...86
Figure VII.1. Architecture SIMD-SM. PE est un élément de calcul sous le contrôle du séquenceur externe ...92
Figure VII.2. Architecture SIMD-DM. PE est un élément de calcul sous le contrôle du séquenceur externe et M représente la mémoire...93
Figure VII.3. Architecture MIMD-SM. P est un processeur...93
Figure VII.4. Architecture MIMD-DM. P est un processeur et M est sa mémoire. ...94
Figure VIII.1. Calcul de l’information mutuelle ... 104
Figure VIII.2. Calcul de la mesure similarité en parallèle... 105
Figure VIII.3. Calcul de gradient de l’information mutuelle par rapports aux paramètres ... 107
Figure VIII.4. Calcul de gradient de l’information mutuelle par rapports aux paramètres en parallèle ... 108
Figure IX.1. Modèle de programmation avec MPI... 114
Figure IX.2. Hiérarchie de la bibliothèque ScaLAPACK. Source [Blackford – 1997]... 115
Figure IX.3. Architecture de l’ALTIX 3300. (Source : Sillicon Graphics)... 116
Figure IX.4. Graphe pour les temps d’exécution, les accélérations et les efficacités du Tableau IX.1. ... 117
Figure IX.5. Répartition par blocs cycliques de la matrice et répartition des processeurs ... 118
Figure IX.6. Les 9 sites qui composent le projet Grid’5000 en France. (Source : [Grid 5000]) ... 121
Figure IX.7. Architecture logicielle de Grid’5000 Source : [Grid 5000])... 121
Figure IX.8. Graphe pour les temps d’exécution, les accélérations et les efficacités du Tableau IX.6. ... 122
Figure IX.9. Graphe pour les temps d’exécution, les accélérations et les efficacités du Tableau IX.7. ... 123
Liste des tableaux
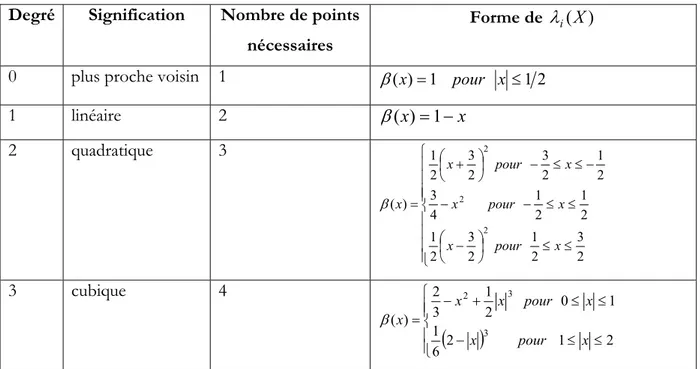
Tableau III.1. Récapitulatif de l’interpolation spline pour la forme des λi(X) , de degré 0 à 3...42
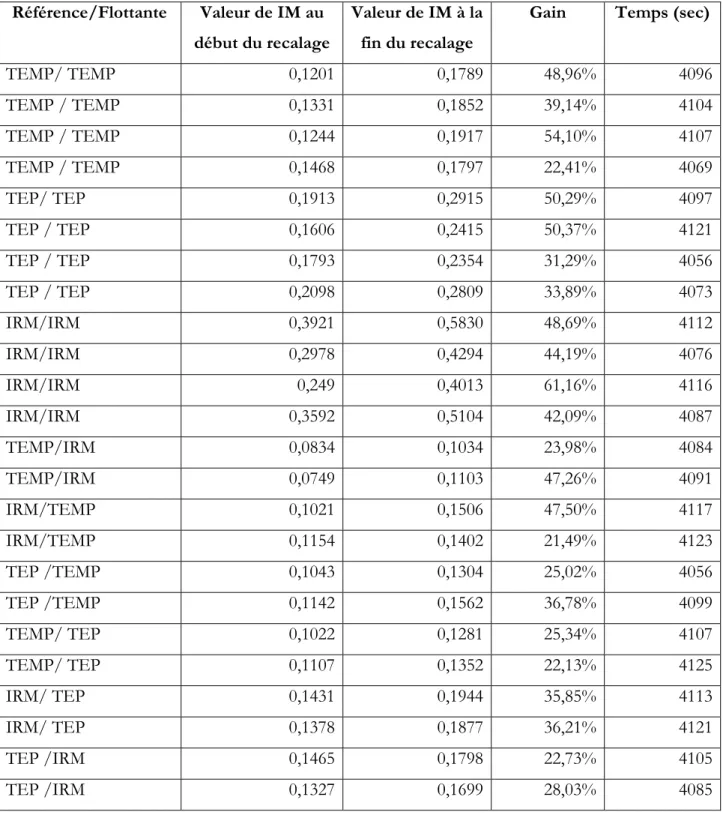
Tableau IV.1. Quelques résultats sur les expérimentations de recalage rigide avec des images TEP, TEMP et IRM...58
Tableau V.1. Relation entre les quatre champs décrivant la sollicitation interne d’un solide ...63
Tableau VI.1. Caractéristiques élastiques des quelques matériaux ...81
Tableau VI.2. Valeurs de IM et gains sur les quatre premières itérations. ...82
Tableau VI.3. Description des maillages pour les 3 niveaux de hiérarchie ...85
Tableau VI.4. Les résultats sur les expérimentations de recalage élastique avec des images TEMP, TEP et IRM. ...87
Tableau IX.1. Comparatif des exécutions sur CALIF... 116
Tableau IX.2. Temps de factorisation et de calcul de l’inverse de K (en seconde) ... 118
Tableau IX.3. Temps d’exécution (en sec), gains et utilisation moyenne de chaque processeur pour les 3 niveaux de recalage élastique, des images de la figure VI.3, avec 1 processeur et 9 processeurs... 119
Tableau IX.4. Description des maillages pour les quatre niveaux... 120
Tableau IX.5. Quelques résultats de recalage sur CALIF... 120
Tableau IX.6. Exécutions du recalage rigide de 1 à 12 processeurs sur Grid’5000... 122
Tableau IX.7. Exécutions de recalage rigide sur Grid’5000 avec 10 à 200 processeurs ... 122
I. Chapitre 1
Introduction générale
Les techniques d’imagerie ne cessent de progresser et d’améliorer leurs résultats tant au niveau de la qualité de l’image que de la vitesse de production de l’image. Les techniques d’imagerie concernent plusieurs domaines notamment la médecine, la télédétection, la paléontologie, l’archéologie, …
Pour tous ces domaines, le but est de pouvoir analyser les images dans un objectif bien précis.
Dans le domaine médical, comparer deux images d’un même patient à des moments différents ou superposer deux images de deux patients sont des tâches quotidiennes. Pour pouvoir suivre l’évolution d’une pathologie d’un patient, on a besoin de comparer différentes images acquises à des instants différents. Toutefois, une technique très pratique est la comparaison d’une image d’un patient par rapport à celle des autres patients ou par rapport à une référence comme l’atlas anatomique ou fonctionnel.
De plus en plus de modalités d’acquisition différentes sont utilisées. Chacune présente ses avantages et ses défauts. Chacune d’elles apporte son lot d’informations pertinentes et une difficulté que l’on rencontre de plus en plus est l’interprétation de ces données.
Une des approches la plus courante est de fusionner des images acquises avec des modalités différentes. Cependant cette opération n’est pas aussi simple à procéder. En effet, la fusion de deux images ne peut pas se faire que si elles sont dans le même repère géométrique. De plus, on peut trouver des distorsions ou des déformations à l’intérieur des images pour rendre la difficulté de comparaison. Avec une même modalité, plusieurs facteurs peuvent être à l’origine de ces problèmes :
• à chaque acquisition, la position du sujet peut être différente, • à chaque acquisition, les paramètres du dispositif sont différents,
• à chaque système d’acquisition, il a ses propres erreurs introduites dans l’image. On peut les interpréter ainsi comme des déformations sur l’image,
• il existe des mouvements de certains éléments des sujets étudiés, par exemple, la déformation des poumons lors de l’inspiration et l’expiration.
Avec tous ces problèmes, il faut faire appel à un processus de recalage qui va permettre de faire coïncider au mieux les images entre elles.
Introduction générale
16
I.1 Imagerie médicale
L’imagerie médicale est un domaine de la médecine qui a connu une grande progression dans les dernières décennies. Evidemment, elle permet au médecin de faire un examen à l’intérieur du corps d’un patient sans avoir recours à l’opération. En effet, elle offre une représentation visuelle de ce qui se passe à l’intérieur d’un corps et permet au médecin de diagnostiquer le patient à partir des images obtenues. De plus, elle permet non seulement d’effectuer un diagnostic mais elle permet aussi actuellement de faire des traitements.
Aujourd’hui, plusieurs techniques d’imagerie existent dans le domaine de la médecine. Généralement, on peut distinguer deux grands types d’imagerie médicale :
• l’imagerie anatomique, • l’imagerie fonctionnelle.
I.1.1
Imagerie anatomique
En imagerie anatomique, une image représente la structure anatomique d’un organe. Ainsi, elle permet de caractériser la forme, le volume d’organes ou encore la structure des tissus. Les images réalisées peuvent être de très bonnes résolutions. Elles sont obtenues :
• soit par la méthode de tomographie. On trouve dans cette catégorie les techniques basées sur le rayon X comme l’angiographie, la tomodensitométrie, la radiographie, … et la résonance magnétique (IRM),
• soit par la méthode échographique qui est fondée sur les ultrasons.
I.1.1.1 Radiographie
La radiographie est une technique d’imagerie basée sur l’utilisation de rayon X. Le plus souvent, la radiographie est encore réalisée sur film. Cependant, plusieurs systèmes proposent la numérisation de l’image obtenue. En effet, on peut transformer les rayons X en électrons par l’intermédiaire d’une couche d'iodure de césium. L'image est créée par la différence d'opacité des tissus aux rayons X. Les tissus mous comme la peau et les muscles sont moins opaques aux rayons X, tandis que les os sont beaucoup plus opaques. Pour des études spécifiques sur certains organes qui n’ont pas d’opacités bien définies, il est indispensable de faire des injections de produits de contraste. Il existe des effets nocifs pour les organismes à cause des rayons X notamment pour les examens répétés.
Introduction générale
I.1.1.2 Tomodensitométrie (TDM)
La tomodensitométrie (TDM) est une technique d’imagerie médicale utilisant le scanner à rayons X. Dans un scanner, il existe un émetteur de rayons X et un récepteur.
Figure I.1. Scanner X : Siemens SOMATOM SENSATION
L’émetteur tourne autour du patient, en lançant des rayons X dans le corps, et le récepteur se charge de mesurer l'intensité des rayons après leur passage dans le corps. C’est à partir de ces mesures qu’on construit l’image. Il est parfois nécessaire de faire ressortir certains tissus en injectant des produits de contraste. Il est évident que la tomodensitométrie peut engendrer des dangers surtout pour des expositions répétées.
I.1.1.3 Imagerie à résonance magnétique (IRM)
L’IRM est une technique d’imagerie très efficace. Elle peut fournir à la fois des données anatomiques et fonctionnelles. Sur certains cas, elle peut procurer des informations pharmacologiques. On peut avoir une image IRM de bonne résolution.
L'IRM est basée sur l'analyse du comportement des protons contenus dans les tissus et soumis d'une part à un champ magnétique et d'autre part à une impulsion de radiofréquence. Lors de l'excitation du proton par l'onde de radiofréquence, il accumule de l'énergie qu'il restitue à l'arrêt de l'impulsion de radiofréquence sous forme d'un signal. C’est ce signal qui est converti en image.
Introduction générale
18
Figure I.2. A gauche, équipement IRM. Toshiba OPART . A droite, une coupe cérébrale dans le plan axial
I.1.1.4 Echographie
L'échographie est une technique d'imagerie utilisant des ultrasons. L'élément de base de l'échographie est une céramique piézoélectrique. Il fait partie de la sonde. Soumis à des impulsions électriques, la céramique vibre et génère des ultrasons.
Figure I.3. A gauche, équipement Ultrason : Toshiba ARTIDA. A droite, une image cardiologique à ultrason
Les échos sont captés par cette céramique. L'image ultrasonore est reconstituée à partir des informations recueillies par la sonde et transmises à l'appareil. Un dispositif de l’appareil se charge d'amplifier et de traiter ces informations afin de les convertir en signal vidéo.
Introduction générale
I.1.2
Imagerie fonctionnelle
L’imagerie fonctionnelle permet d’observer l’activité d’un organe surtout lors de l’exécution d’une tâche spécifique. On peut citer les techniques de médecine nucléaire comme la tomographie par émission de positons (TEP), la tomographie par émission monophotonique (TEMP), … et les techniques électrophysiologiques.
I.1.2.1 Tomographie par émission de positons (TEP)
La tomographie par émission de positons permet de visualiser les activités du métabolisme d’un organe. Elle repose sur le principe de la scintigraphie. En effet, la TEP constitue une modalité d'imagerie fonctionnelle reposant sur l'administration au patient d'un traceur légèrement radioactif dont on étudie le métabolisme dans l'organisme.
Figure I.4. A gauche, appareil pour la TEP : Siemens BIOGRAPH TRUEPOINT. A droite, une image cérébrale en TEP dans les plans transversal, sagittal et coronal.
La plupart du temps, ce traceur est le fluor. Ce traceur est semblable au glucose : il se fixe au niveau des tissus qui consomment de grandes quantités de ce traceur comme les tissus cancéreux, le muscle cardiaque ou encore le cerveau. L’atome radioactif émet des positons dont l'annihilation produit elle-même deux photons. La caméra à positon enregistre les désintégrations de l'isotope injecté au patient et permet ainsi l’acquisition des images. Les images réalisées sont de basses résolutions.
Introduction générale
20
I.1.2.2 Tomographie par émission monophotonique (TEMP)
Tout comme l’imagerie TEP, la tomographie par émission monophotonique (TEMP) consiste à injecter un produit radioactif chez le patient. Le principe ressemble aussi à TEP, mais au lieu de détecter une paire de photons, la TEMP détecte un seul photon. L’acquisition se fait par un ensemble de gamma caméras qui tournent autour du patient.
Figure I.5. Appareil pour la TEMP : Siemens SYMBIA TRUEPOINT
L'imagerie TEMP se distingue de l'imagerie TEP par son moindre coût, mais aussi par une efficacité de détection des photons beaucoup plus faible, ce qui rend impossible d'effectuer une succession de tomographies pendant la durée de réalisation d'un examen, proche d'une trentaine de minutes. Comme la TEP, les images obtenues en TEMP sont de basses résolutions.
A partir de toutes ces informations concernant l’imagerie médicale, le pouvoir de faire des comparaisons sur les images est attrayant. En outre, il est plus intéressant si on peut arriver à fusionner ces données.
Par conséquent, les travaux consistent à la recherche d’une méthode de recalage d’images multimodal totalement automatique et qui s’adapte bien avec des images de basse résolution. De plus, grâce à cette méthode, on pourra faire un recalage avec plus de systèmes d’imagerie comme le TEP, le TEMP, l’imagerie à résonance magnétique (IRM), l’ultrason, … Enfin, on doit envisager la parallélisation des calculs pour repartir le processus de recalage.
I.2 Recalage d’images
Le terme recalage peut signifier mise en correspondance ou alignement. Aucune méthode de recalage unique n’existe pour résoudre tous les problèmes de mise en correspondance. Ce qui nous amène à dire qu’un problème de recalage peut avoir diverses définitions. Pour mieux cerner cette diversification, on va présenter les différents critères de recalage dont :
Introduction générale
• dimension : la dimension peut être un recalage entre 2D-2D,2D-3D ou 3D-3D. il se peut aussi que le composant temporel entre en jeu,
• type de la base : la base de recalage peut être extrinsèque, intrinsèque ou indépendante de l’image. Elle est dite extrinsèque si les composants du recalage sont à l’extérieur des objets (par exemple, on a mis, avant l’acquisition, des marqueurs facilement reconnaissables dans l’image). La base est dite intrinsèque, si les composants nécessaires pour le recalage sont extraits d’images des objets (aucun élément extérieur n’a été placé lors de l’acquisition). Enfin, celle-ci est indépendante de l’image lorsque les appareils de mesure ont des positions spatiales bien définies (recalage par rapport aux prises de vue).
• type de la transformation : la transformation est-elle rigide ou non rigide (affine, projectif, élastique, …),
• globalité de la transformation : une transformation est locale lorsqu’elle n’affecte qu’une partie de l’image. Dans le cas contraire, la transformation est globale,
• niveau d’interaction : les niveaux d’interaction se présentent sous trois formes. Le niveau interactif, c’est à dire que l’opérateur effectue totalement le recalage, le niveau semi-automatique où l’opérateur procure certaines connaissances et corrections au système, et le niveau totalement automatique,
• modalité : la question est de cerner si la source des images provient du même système d’imagerie (monomodal) ou non (multimodal),
• sujet : ce critère est surtout pris en considération dans le domaine de la médecine. S’agirait-t-il des images provenant d’un même patient (intra-sujet), des patients différents (inter-sujet), ou d’une image de référence de l’atlas ?
Introduction générale
22
I.3 Contributions
On a comme critère un recalage d’images multimodal totalement automatique et qui utilise les intensités des images comme primitives. Ce recalage comprend un recalage rigide global suivi d’un recalage non-rigide local. On se base sur des images 3D.
A partir des critères cités ci-dessus, on a fait des études sur une méthode de recalage multimodal. D’abord, on a fait une étude approfondie sur le recalage rigide. On a utilisé l’information mutuelle selon [Mattes et al. 2003] comme mesure de similarité et on a pris la combinaison de la transformation rigide et d’un facteur d’échelle isotrope pour la transformation géométrique. Ensuite, on a effectué une étude sur le recalage non-rigide avec l’utilisation du modèle élastique, de la méthode des éléments finis et de la variante de [Mattes et al. 2003] pour l’information mutuelle. Enfin, on a étudié le portage des algorithmes dans l’environnement parallèle pour repartir le recalage.
Pour mieux présenter ces études, ce mémoire va être divisé en trois parties :
• La partie 1 consiste à présenter les fondements théoriques de recalage. On y trouve deux chapitres. Le chapitre 2 présente l’état de l’art pour le recalage d’images. Il contient les différentes approches et méthodes tant en recalage rigide qu’en recalage non-rigide. Le chapitre 3 énumère les différents éléments de calcul qui interviennent dans le processus de recalage.
• Après la présentation des fondements théoriques, la deuxième partie met en valeur les études de recalage qu’on a entreprises. On détaille dans le chapitre 4 l’étude sur le recalage rigide global. Tandis que dans le chapitre 5, on présente le modèle élastique et la méthode des éléments finis. Le chapitre 6 détaille la méthode de recalage non-rigide avec la combinaison du modèle élastique, de la méthode des éléments finis et de l’information mutuelle. On trouve également quelques expérimentations et résultats dans ce chapitre. • La parallélisation du processus de recalage est ensuite abordée, la troisième partie présente
l’aspect reparti du recalage. Cette partie est divisée en trois chapitres. Le chapitre 7 décrit l’environnement parallèle avec la présentation de quelques architectures. Le chapitre 8 est consacré au portage des algorithmes de recalage dans l’environnement parallèle. On présente ensuite quelques expérimentations qui ont été effectuées dans le chapitre 9.
Partie 1 – Fondements théoriques : état de l’art,
problématique, éléments de calcul
II. Chapitre 2
Le recalage d’images
II.1 Introduction
Le recalage d’images est un problème de mise en correspondance qui n’est pas encore entièrement résolu. Ainsi, il n’existe pas de problème unique de recalage d’images mais plutôt d’une variété d’interprétations visuelles dont nous donnons intuitivement les classifications possibles.
Le recalage d’images peut se définir comme la recherche de la transformation spatiale des points d’une image, en s’appuyant sur les points physiques correspondants d’une autre image, pour que les deux images soient alignées dans le même repère. Ainsi, en recalage, on parle toujours de deux images, l’une sert de référence et l’autre l’image est à transformer. L’image de référence est aussi appelée image cible et l’image à transformer est appelée image source ou image flottante.
Ce chapitre consiste à présenter les différents aspects du recalage d’images. Ainsi, après la description des objectifs du recalage, on abordera les deux grandes approches dans le domaine de recalage. En effet, il existe deux grandes familles d’approches algorithmiques : l’approche géométrique et l’approche iconique [Roche 2001]. Enfin, on décrira, le recalage rigide et le recalage non-rigide.
II.2 Objectifs
Le recalage d’images peut se définir comme la recherche des transformations spatiales des points d’une image flottante, basée sur les points physiques correspondants d’une image de référence, pour que les deux images soient dans le même repère.
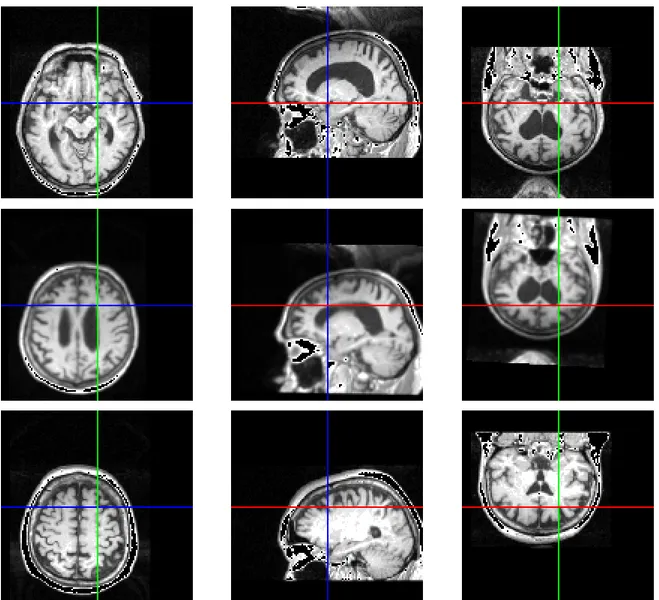
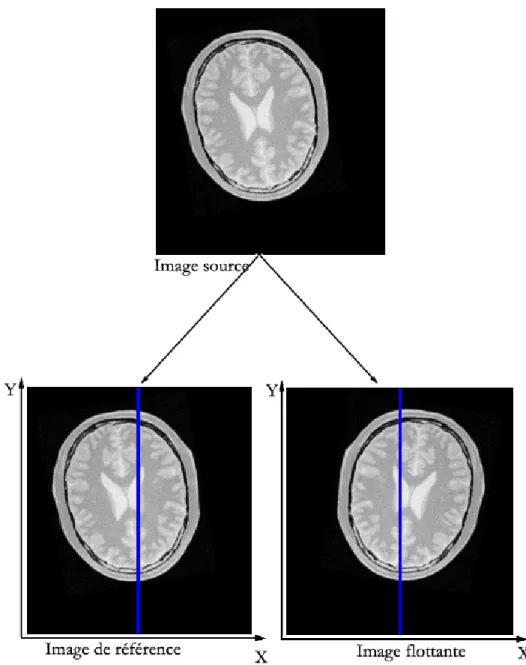
Pour mieux comprendre le problème de recalage, Figure I.6 montre deux coupes de cerveau de modalités différentes.
Comment un médecin peut-il analyser ces images ? Une éventualité est que le médecin ait un sens très imaginatif, et il tente de transformer mentalement les images et essaie par la suite de faire des diagnostics. Cette solution est pratiquement inenvisageable. Ainsi, un processus de recalage calculé est quasiment inévitable pour pouvoir comparer ces deux images.
Chapitre 2 - Le recalage d’images
26
En fait, lors des acquisitions espacées dans le temps d’un objet rigide, cet objet occupe rarement une position fixe par rapport au système d’imagerie. Ainsi, ses représentations successives seront elles mêmes localisées différemment dans les images. Dans ce cas, le recalage consiste à calculer la transformation géométrique qui permet la mise en correspondance des voxels représentant des points physiquement homologues. Par conséquent, ce problème peut être considéré comme étant un problème de transformation linéaire. En effet, on cherche la transformation linéaire à appliquer à l’une des deux images pour qu’elles soient dans le même repère. Dans cette situation, on parle de recalage rigide global.
Cependant, la plupart des objets, surtout dans le domaine de la médecine, ne sont pas parfaitement rigides. Les objets, comme le cœur, l’estomac peuvent se déformer d’une façon complexe d’une acquisition à une autre. Aussi, on cherche les déformations locales qu’il faut appliquer pour qu’on puisse procéder à l’analyse. Il s’agit d’une transformation non rigide.
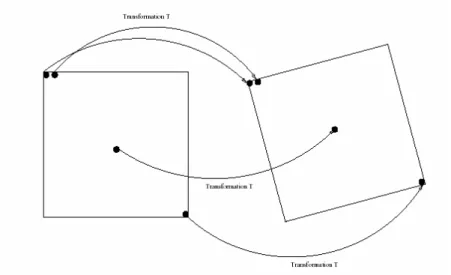
Schématiquement, on peut interpréter le recalage comme présenté dans la Figure II.1:
Figure II.1. Processus de recalage. I et J sont respectivement l’image cible et l’image source
II.3 Approches géométriques
L’approche géométrique consiste à trouver les structures communes dans les deux images c'est-à-dire à identifier dans les deux images les primitives géométriques comme les points, les courbes, les surfaces, les volumes, … et à mettre en correspondance ces primitives. Le recalage d’images se fait en deux grandes étapes : la segmentation et la mise en correspondance ou le recalage proprement dit.
Image I
Image J Interpolation
Mesure Optimisation
Chapitre 2 - Le recalage d’images
(a) (b) Figure II.2. Image simplifiée d’une coupe de cerveau. (a) : l’image de référence avec des points d’amers et (b) :
l’image flottante avec les points d’amers correspondants
L’étape de segmentation consiste à identifier les primitives dans les images. La difficulté se repose sur l’identification de ces primitives homologues. La segmentation peut se faire soit manuellement soit automatiquement. La segmentation manuelle est encore très courante en imagerie médicale. Les primitives sont extraites et labellisées à partir de l’expertise du radiologue. Ces primitives peuvent être des zones propres à l’anatomie du patient, c’est ce qu’on appelle de nature intrinsèque, ou des marqueurs stéréotaxique utilisés pour fournir une invariance topologique, appelées aussi des primitives extrinsèques [van den Elsen et al, 1993]. Par contre, en segmentation automatique, il faut repérer les invariants différentiels comme les coins et les courbes stables. On essaie de reproduire le processus humain pour l’extraction des primitives. Plusieurs études ont été déjà menées sur les détections automatiques des points extrémaux [Thirion 1996], des lignes de crête [Subsol et al. 1998], des surfaces [Pelizzari et al. 1989] et des volumes [Malandain et al. 1994].
La deuxième étape est la mise en correspondance. A partir de la détection de ces primitives, une multitude d’approches permettent de faire le recalage entre autres la minimisation de la distance euclidienne, la minimisation de la carte de distances [Borgefors, 1988] et les algorithmes basés sur des correspondances floues [Rangarajan et al., 1999].
La Figure II.2 présente les points homologues des deux images. On peut lancer la mise en correspondance en cherchant par exemple le minimum de la distance quadratique entre chaque couple de points. Plusieurs littératures se fondent sur la mise en correspondance de points [Fitzpatrick and West, Feb. 2000].
Chapitre 2 - Le recalage d’images
28
Ainsi, la qualité du recalage dépend du nombre de primitives extraites. Le résultat du recalage dépend aussi du résultat de la segmentation. De plus, intuitivement, pour un recalage multimodal avec des images de basse résolution comme les images issues de la tomographie par émission de positons (TEP) et de la tomographie par émission monophotonique (TEMP), l’approche géométrique s’avère moins efficace.
II.4 Approches iconiques
L’approche iconique est basée directement sur les intensités des images. Contrairement à l’approche géométrique, l’étape de compréhension de la géométrie de l'objet ou la segmentation n’est plus nécessaire. Cette approche consiste essentiellement à optimiser un critère de similarité fondé uniquement sur des comparaisons d'intensités. La méthode de bas niveau est une autre appellation de l’approche iconique. Par conséquent, cette approche est plus adaptée en recalage multimodal. Ainsi, c’est à partir des intensités des images qu’on construit la fonction objectif (ou fonction de coût). Le processus de recalage se fait par la suite en optimisant cette fonction.
Grâce aux succès des algorithmes fondés sur l’information mutuelle, cette approche regagne d’intérêt depuis une quinzaine d’année.
De plus, on peut trouver plusieurs variantes de cette approche. [Cachier 2002] propose deux types d’algorithme de recalage en approche iconique : l’algorithme iconique standard, défini par la mesure de similarité et la régularisation, et l’algorithme reposant sur l’appariement iconique, contraint par l’appariement et le lissage par régularisation
On trouve dans [West et al. 1997] une comparaison d’une douzaine de méthodes de recalage scanner/IRM et TEP/IRM, et on constate un net avantage de l’approche iconique par rapport à l’approche géométrique.
Etant donné que cette étude est élargie dans le domaine de recalage multimodal, on se concentre sur l’approche iconique dans la suite de ce mémoire.
II.5 Recalage rigide global
Le recalage rigide global consiste à rechercher la transformation géométrique qui permet d’aligner globalement les structures. Le recalage rigide est surtout utilisé pour des objets rigides. Mais son
Chapitre 2 - Le recalage d’images
utilisation ne se limite pas avec des objets rigides parce qu’on peut l’utiliser pour pouvoir comparer globalement des objets déformables.
On peut définir le recalage rigide par l’expression suivante :
(
I T J)
C T E Tmin , o arg ∈ − = (2.1) avec − T : la transformation recherchée T minarg : fonction d’optimisation C : Mesure de similarité
I : image de référence (comme une fonction) J : image flottante (comme une fonction) E : espace de recherche
Plusieurs études ont été déjà menées dans le recalage rigide [Gilles 1996] [Maintz et al., 1998].
Certaines d’entre elles sont fondées sur la maximisation de l’information mutuelle [Viola 1995] [Maes et al., 1999].
Une méthode de recalage rigide se diffère notamment par la transformation choisie. Plusieurs transformations peuvent être énumérées dont la transformation rigide, la transformation affine, la transformation projective et la transformation utilisant un quaternion.
II.5.1
Transformation
Transformation rigideEn ce qui concerne la transformation rigide, plusieurs interprétations peuvent être constatées. Logiquement, la transformation rigide 3D consiste en une isométrie, c'est-à-dire une composition de rotation et de translation. Par contre, on peut aussi considérer la transformation rigide 3D comme la composition d’une rotation, d’une translation et d’un facteur d’échelle. A tout point
(
x y z)
P , , de l’image, on a le point transformé P'
(
x,'y,'z')
avec l’expression : ). (
' RP T
P→λ + (2.2)
Chapitre 2 - Le recalage d’images
30
Avec des images ne présentant pas d’évolution de structure, cette transformation est très intéressante. De plus, on peut l’utiliser comme transformation préalable avant le recalage non-rigide.
Figure II.3. Transformation rigide et transformation affine Transformation affine
La transformation affine est la composition de la rotation, de la translation, du changement d’échelle et du « cisaillement ». Le cisaillement est une transformation à un étirement selon un axe. A tout point P
(
x,y,z)
de l’image, on a le point transformé P'(
x,'y,'z')
: = 1 1 0 0 0 1 ' ' ' 23 22 21 20 13 12 11 10 03 02 01 00 z y x a a a a a a a a a a a a z y x (2.3)
Une application concrète de cette transformation est la « morphing ». La transformation affine par morceau est très utilisée dans le recalage inter-sujets [Talairach 1988].
Transformation projective
Cette transformation est une transformation affine avec la projection. Elle est essentiellement utilisée dans le domaine de recalage 3D/2D comme le recalage de radiographies sur les données IRM ou Scanner X [Zollei et al. 2001].
L’alignement n’est gardé que pour les éléments appartenant aux axes. En effet, le transformé d’un segment de longueur L n’est pas un segment de longueur sauf que le segment est horizontal ou vertical.
Quaternion
Un quaternion est une extension de nombres complexes. Un quaternion q peut être considéré comme une combinaison linéaire de quatre quaternions "unités" 1, i, j, et k
Chapitre 2 - Le recalage d’images ) , ( . . . 1 . bi c j dk a V a q= + + + = (2.4)
avec a,b,c et d des nombres réels, i2 = j2 =k2 =−1 et le vecteur V a comme coordonnées (b,c,d)
Un quaternion q=(cosϕ,sinϕ.N) représente une rotation d’un angle 2 autour du vecteur ϕ unitaire N
La rotation par quaternion s’avère intéressante du fait qu’on ne cherche que le vecteur unitaire N et l’angle ϕ, mais l’expression de quaternion Q=q0 +q1ir+q2rj+q3kr n’est pas de la forme vectorielle dans l’espace, ainsi cela pose un problème à la combinaison avec la translation et le changement d’échelle dans le recalage.
Figure II.4. Coupe axial de poumons. A gauche, en inspiration. A droite, en expiration
II.6 Recalage non-rigide local
En recalage non-rigide, on se met toujours dans le domaine des déformations locales. Etant donné que le but n’est pas de faire une procédure de « morphing », il faut prendre en compte certains critères de régularité. Par conséquent, deux énergies rentrent en compétition : l’énergie de similarité (externe) et l’énergie de régularisation (interne). L’énergie totale s’exprime par :
) , ( ) (T E I J E E T imilarité s regularité − 14243 = (2.5) avec T : la transformation
I : image de référence (comme une fonction) J : image flottante (comme une fonction)
Chapitre 2 - Le recalage d’images
32
Le but c’est de minimiser cette énergie c'est-à-dire que l’on cherche l’état d’équilibre.
La qualité de recalage dépend alors de la modélisation des images et du choix de la mesure de similarité. On trouve plusieurs modélisations notamment le modèle élastique, le modèle fluide et le modèle spline.
II.6.1
Modélisations
Modèle élastiqueOn modélise la déformation comme étant un processus physique [Bajcsy et al. 1983]. Il existe deux forces : la force interne qui retient « le corps élastique » dans son état d’équilibre et la force externe qui déforme ce corps. Le comportement du corps élastique est décrit par :
0 ) , , ( )) , , ( ( ) ( ) , , ( 2 + + ∇ ∇ + = ∇ u x y z u x y z g x y z µ λ µ (2.6) avec 2
∇ : opérateur de LAPLACE (laplacien),
∇: opérateur gradient,
u : champ de déplacement, g : force externe (force de similarité)
µ et λ : coefficients de LAME
En recalage, on considère les images comme étant un matériau élastique. Ainsi, une image possède les toutes caractéristiques d’un corps élastique. Ce modèle est très pratique surtout avec des petites déformations.
Pour la résolution de l’équation de dérivées partielles (EDP) (2.6), on peut trouver la méthode de différences finies [Press et al. 1992] ou la méthode des éléments finis [Haynor et al. 1998]
Modèle fluide
Tout comme le modèle élastique mais à la différence que les déformations fortement locales sont affaiblies par le temps. Ainsi, l’équation de déformation est de la forme :
0 ) , , ( )) , , ( ( ) ( ) , , ( 2 + + ∇∇ + = ∇ v x y z v x y z g x y z µ λ µ (2.7) avec ) , , , ( ). , , , ( ) , , , ( ) , , , ( v x y z t u x y z t t t z y x u t z y x v + ∇ ∂ ∂
Chapitre 2 - Le recalage d’images
Pour résoudre l’équation (2.7), on peut utiliser la méthode de «sur-relaxation successive» [Christensen et al. 1996], la modélisation des déformations par un processus de diffusion [Thirion 1998] ou la technique de flot optique [Malsch 2006].
Modèle spline
Ce modèle est basé sur la fonction spline. Cette fonction est définie par morceaux par des polynômes. Etant donnés k points appelés noeuds ou points de contrôles dans un intervalle [a,b] avec a=t0 <t1<...<tk−1=b , S est une courbe spline de degré n avec S∈Cn−1(a,b) et la fonction S dans l’intervalle [ti,ti+1] est un polynôme de degré n [Pouget 1998]
La plupart de techniques de recalage basées sur ce modèle partent du principe qu’on peut identifier un ensemble de points homologues que les deux images. Ces points sont considérés comme points de contrôles. Ces points de contrôles forment un champ de déplacement.
Pour la résolution, on peut recourir à la déformation des formes libres [Sederberg and Parry, 1986] [Atif 2004].
II.6.2
Méthodes de résolution
Parmi les multitudes de méthodes de résolution, on va décrire celles les plus utilisées dans le domaine du recalage dont la méthode des éléments finis, le flot optique et la déformation de forme libre.
Méthode des éléments finis
La méthode des éléments finis consiste à rechercher une solution approchée de la résolution d’un problème dans un domaine continu Ω. En effet, elle consiste à découper le domaine continu Ω
en plusieurs sous domaines Ωi appelés éléments finis et à résoudre le problème par morceaux. Ce découpage est appelé maillage. Ainsi, le maillage consiste à discrétiser un domaine complexe (l’image) en éléments géométriques simples comme un polygone (triangle, rectangle …),un polyèdre (tétraèdre, hexaèdre … ).
La méthode des éléments finis est globalement constituée par les étapes suivantes :
• découpage de l’image en plusieurs éléments finis. A la fin de cette étape, on possède plusieurs nœuds,
• construction des équations sur chaque élément, • assemblage des équations sur le domaine,
Chapitre 2 - Le recalage d’images
34
Les équations sont obtenues à partir des caractéristiques de régularité et de la mesure de similarité. Généralement, à la phase de résolution, on a à résoudre un système linéaire. [Edwards et al. 1998] a proposé un recalage avec la méthode des éléments finis simplifiée en se basant sur des points de repère correspondants.
Flot optique
Le concept du flot optique a été introduit en vision par ordinateur afin de recouvrer le mouvement d’un objet relativement à une visionneuse entre deux trames successives, dans une séquence temporelle d’images. Le flot optique est un champ de déplacement visuel qui permet d'expliquer des variations dans une image animée en terme de déplacement de points images. L'hypothèse que l'on fait afin d'en tirer une équation simple est que la couleur d'un point image est indépendante du temps. Par analogie, le flot optique est équivalent à l’équation de mouvement des écoulements incompressibles en mécanique des fluides. Pour une image I, l’équation du flot optique s’écrit : 0 = ∂ ∂ + ∂ ∂ + ∂ ∂ + ∂ ∂ t I dt dz z I dt dy y I dt dx x I (2.8)
En recalage d’image, pour une image de référence F et une image flottante M, au point X, on a la relation : )) ( ) ( ( ) ( ). (X F X M X F X D ∇ =− − (2.9)
avec D(X) le flot optique et ∇F(X) le gradient de l’image de référence au point X. La projection du vecteur selon la direction du gradient s’exprime par :
2 ) ( ) ( )) ( ) ( ( ) ( X F X F X F X M X D ∇ ∇ − − = (2.10)
Cette équation est par la suite améliorée par [Thirion 1998] en la re-normalisant :
2 2 ( ( ) ( )) ) ( ) ( )) ( ) ( ( ) ( X F X M X F X F X F X M X D − + ∇ ∇ − − = (2.11)
[Thirion 1998] a présenté un algorithme de recalage très rapide. De plus, une étude récente de [Rebiere 2007] décrit une autre approche se basant sur le flot optique.
Déformation de forme libre
Le principe consiste à plonger l’objet à déformer dans un espace et c’est cet espace qui sera déformé. A partir de la déformation effectuée sur cet espace, on calcule la déformation à appliquer sur l’objet. Ainsi, on ne déforme pas directement l’objet, mais on utilise la déformation
Chapitre 2 - Le recalage d’images
des points de contrôle plutôt situés dans l'espace englobant pour calculer la déformation de chaque voxel de l'objet. Principalement, on trouve les phases suivantes dans la déformation de forme libre :
• création du volume englobant et propagation des points de contrôle • construction de grille à partir de ces points de contrôle,
• avec le déplacement des points de contrôle, on déforme l’objet.
En recalage, le déplacement des points de contrôle est guidé par la mesure de similarité. Une combinaison du modèle spline et de la déformation de forme libre est proposée par [Atif 2004].
II.7 Conclusion
On a présenté dans ce chapitre les différentes méthodologies que l’on peut trouver dans le domaine de recalage. Partant sur le fait qu’on fait un recalage multimodal, on a opté l’approche iconique. Cependant, on n’a pas fait une liste exhaustive des méthodes existantes mais on a décrit brièvement celles qui sont les plus utilisées. Parfois, une suite de recalages rigides globaux et de recalages non-rigides s’avère indispensable. En effet, pour avoir un bon résultat de recalage, il faut que les deux images soient bien dans le même repère géométrique avant de procéder aux déformations locales. Certains auteurs appellent ce procédé par « approche hybride ».
Dans les travaux décrits dans ce mémoire, on a adopté cette approche hybride. Pour ce faire, on a adopté la transformation rigide, le modèle élastique et la méthode des éléments finis.
III. Chapitre 3
Eléments de calcul
III.1 Introduction
Comme on l’a vu dans la Figure II.1., le processus général de recalage, quelque soit le type de recalage choisi, la méthode adoptée et la modélisation utilisée, doit contenir toutes les phases indiquées en boucle. Il est alors judicieux de voir les mesures de similarité, les optimisations et les interpolations comme étant des éléments de calcul dans le recalage. De plus, la performance de recalage dépend du choix de ces éléments de calcul. En effet, le choix de la mesure de similarité, de l’optimisation et de l’interpolation intervient à la fois sur la qualité du résultat et du temps d’exécution du processus.
Ainsi, ce chapitre présente les différentes mesures de similarité existantes, les optimisations et les interpolations les plus utilisées.
III.2 Mesures de similarité
La mesure de similarité est la fonction de comparaison entre l’image de référence et l’image flottante. Par conséquent, la mesure de similarité est l’élément le plus critique dans le processus du recalage. Cependant, le choix dépend essentiellement de l’approche et la modalité du recalage. Etant donné que l’approche iconique a été adoptée dans cette étude, tous les calculs se font à partir des intensités des images. Parmi les plus répandus, on trouve la moyenne des carrés, la corrélation normalisée, le rapport de corrélation et l'information mutuelle.
III.2.1
Moyenne des carrés
Avec, deux images I et J de taille N, cette mesure fait le calcul de la somme des différences d’intensités entre tous les points :
∑
−
= N i i iJ
I
N J I MS( , ) 1(
)
2 (3.1)A partir de cette équation, la moyenne des carrés est proportionnelle à la distance des deux images. Le temps de calcul avec cette mesure est très rapide car la complexité est de ≈ Ο
( )
N . Malheureusement, cette mesure est limitée au recalage monomodal.Chapitre 3 – Eléments de calcul
38
III.2.2
Corrélation normalisée
Pour une image de référence I et une image flottante J, la corrélation normalisée s’exprime par :
∑ ∑
∑
= N i N i i i N i i i J I J I J I NC 2 2. . ) , ( (3.2)avec N la taille d’une image. L’utilisation de cette mesure est plus efficace avec images bruitées mais le temps de calcul avec la corrélation normalisée est plus long que ce de la moyenne des carrés. De plus, tout comme la moyenne des carrés, son utilisation est limitée pour le recalage monomodal.
III.2.3
Rapport de corrélation
[Roche 2001] a proposé une nouvelle formulation basée sur la dépendance fonctionnelle de deux images I et J. Cette formulation a été appelée le rapport de corrélation généralisé. Ce rapport s’exprime par : 2 2 2( ) 1 1 j j j p J I σ σ η = −
∑
(3.3) avec 2 2 2∑
∑
− = i i i ii pi p σ 2 , 2 , 2∑
∑
− = i i i j i i j i j i p p i p p σ∑
= j j i i p p ,Cette mesure de similarité peut être utilisée pour un recalage multimodal pour la simple raison qu’elle mesure l’intensité d’une liaison fonctionnelle entre les intensités.
III.2.4
Information mutuelle
Il est important de signaler qu’il y a eu des moments où l’approche iconique était quasiment tombée en désuétude, surtout en recalage multimodal. Mais avec le succès de l’utilisation de l’information mutuelle [Collignon et al., 1995] [Viola 1995], l’approche iconique regagne de
Chapitre 3 – Eléments de calcul
l’intérêt. Dans l’étude qu’on a entrepris pour le recalage multimodal, on va s’intéresser à l’information mutuelle.
L’information mutuelle est un outil de la théorie de l’information qui mesure la quantité d’information qu’une image donne de l’autre.
En fait, on appelle information mutuelle entre deux événements I et J la quantité : ) / ( ) ( ) ; (I J h I h I J IM = − (3.4)
où h est la mesure de l’incertitude d’un événement qui s’exprime par :
{ }
EP E
h( )=−log (3.5)
avec P
{ }
E est la probabilité de l’événement ESelon l’équation (3.4), l’information apportée par J sur I est la diminution de l’incertitude sur I lorsque J est réalisé.
On peut en déduire que :
) ( ) ( ) ( ) ; (I J h I h J h I J IM = + − ∩ (3.6)
Cette expression nous permet de dire que : ) ; ( ) ; (I J IM J I IM = (3.7)
Ainsi, si I et J sont indépendants IM(I;J)=0
Plus concrètement, pour une image de référence I et une image flottante J, l’information mutuelle s’exprime par ) , ( ) ( ) ( ) , (I J H I H J H I J IM = + − (3.8)
avec H(X) l’entropie de X. Elle est donnée par :
∑
∈ − = X x x p x p X H( ) ( )log( ( )) (3.9)Et on peut exprimer l’information mutuelle par :
j i j i j i j i p p p p J I IM . log . ) ; ( , , ,
∑
= (3.10)où p (respectivement i p ) est la probabilité de trouver un point de l’image I (respectivement j
l’image J) ayant l’intensité i ( respectivement l’intensité j) , tandis que pi,j est la probabilité de trouver un point de l’image I ayant l’intensité i et que son homologue dans l’image J a l’intensité j. On appelle aussi pi,j l’histogramme conjoint.
Chapitre 3 – Eléments de calcul
40
• la méthode basée sur une loi de probabilité discrète selon [Collignon et al. 1995] et [Maes et al. 1997],
• la méthode avec estimation des fonctions de densité de probabilité.
La première méthode s’appuie sur l’histogramme conjoint normalisé. Ainsi pour chercher une solution, il faut une optimisation stochastique. En effet, toute la formulation du problème de recalage se trouve principalement dans le domaine discret, ainsi on est en présence d’une fonction objectif non dérivable. Cette méthode est très lente mais beaucoup plus précise [Collignon et al. 1995].
La deuxième méthode est beaucoup plus attrayante. Avec un ensemble A formé par des NA échantillons, la densité de probabilité estimée est donnée par :
∑
∈ − = ≈ A x i A i x x K N x p x p( ) *( ) 1 ( ) (3.11)La fonction K est appelée le noyau de Parzen. Elle peut être la fonction Gauss ou la fonction B-spline. D’après l’équation (3.11), K détermine la contribution chaque échantillon xi dans
l’estimation de p*(x). L’entropie de X s’écrit : dx p p
X
H( )=−
∫
X log X (3.12)et l’information mutuelle s’exprime par :
∫∫
= j i i j j i j i p p p p J I IM , , , log ) ; ( (3.13)Plusieurs variantes du calcul de l’information mutuelle existent, entre autres, la méthode trouvée par Viola et Wells qui est basée sur la moyenne empirique du calcul de l’entropie [Viola et Wells, 1997], l’approche proposée par [Mattes et al., 2003] qui consiste à diviser l’histogramme conjoint avec des « casiers » réguliers et évaluer la probabilité estimée p*sur chaque casier, le procédé de calcul de l’information mutuelle quadratique normalisé proposé par [Atif et al., 2004].
Dans cette étude, on a choisi la variante de [Mattes et al., 2003] pour des raisons de rapidité et d’efficacité.
III.3 Les interpolations
L'interpolation est une opération permettant de construire une fonction à partir de la donnée d'un nombre fini de valeurs. C’est le moyen de donner une valeur à un point par rapport aux
Chapitre 3 – Eléments de calcul
points de contrôle. On peut aussi interpréter l’interpolation comme reconstruction d’un signal à partir des échantillons.
On sait que, pour un espace E de dimension n avec comme base (e1,e2,...,en) , il existe un espace de dual E formé par les formes linéaires de E. * E est de dimension n et peut posséder * comme base (e1*,e*2,...,e*n) et : = = = non si j i si e ei j ij 0 1 ) ( * δ
L’interpolation peut être interprétée comme la recherche de l’expression des points à partir des points de contrôle
Si pour n points (p1,p2,...,pn) donnés, on a (f1,f2,...,fn) l’ensemble des valeurs dans une fonction f avec f(pi)= fi, alors tout point X a une valeur Y = f(X) :
n n X f f X f X X f Y = ( )=λ1( ) 1+λ2( ) 2 +...+λ ( ) (3.14) et (λ1,λ2,...,λn)est une base du dual de (p1,p2,...,pn) car
= = = non si j i si pj ij i 0 1 ) ( δ λ
Les λi(X)se calculent par le type de l’opérateur de l’interpolation (Lagrange, Taylor,…), du degré de l’approximation.
On peut ainsi trouver l’interpolation lagrangienne, l'interpolation newtonienne et d’autres dans la littérature en analyse numérique [Schatzman 2001] [El Jai 2003].
Dans le processus de recalage, l’interpolation est une étape très importante. A chaque transformation, le calcul de l’intensité d’un point est basé sur l’interpolation. La plus courante et la plus adaptée en recalage est l’interpolation spline.
) (X
i
λ sont des polynômes de degré égal au degré de l’interpolation. Par exemple, pour l’interpolation plus proche voisin, λi(X) sont de degré 0 ; pour l’interpolation linéaire, λi(X) sont de degré 1 ; pour l’interpolation cubique, λi(X) sont de degré 3.
Le fait que λi(X)sont des fonctions multilinéaires et polynomiales, on a :